Linux系统中驱动入门设备树DTS(经典)
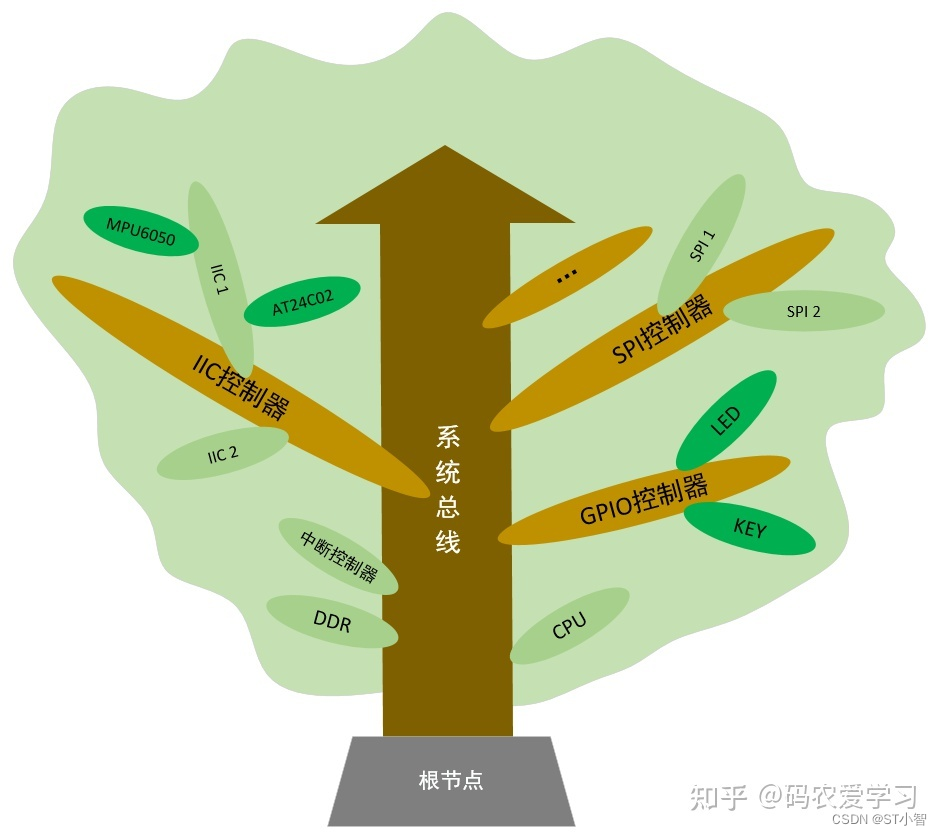
设备树(DTS:device tree source),字面意思就是一块电路板上设备如上图中CPU、DDR、I2C、GPIO、SPI等,按照树形结构描绘成的一棵树。按照策略和功能分离的思路,就是驱动代码(功能)和设备树DTS配置文件(策略)分开来进行设计,这样针对不同的电路板,Linux驱动代码就不用动了,只需要改改DTS就可以,DTS中的配置会决定哪些驱动去运行。
Linux相关知识在嵌入式领域中很重要,要学习可以找一个能运行Linux代码的环境,最好有一个开发板,也可以用qemu在ubuntu上运行。
1. 设备树起源
在Linux 2.6中,ARM架构的板极硬件细节过多地被硬编码在arch/arm/plat-xxx和arch/arm/mach-xxx中,如果外设发生相应的变化,那么驱动代码就需要改动。
2011年,Linux之父Linus Torvalds发现这个问题后,就通过邮件向ARM-Linux开发社区发了一封邮件,不禁的发出了一句“This whole ARM thing is a f*cking pain in the ass”。之后,ARM社区就引入了PowerPC等架构已经采用的设备树(Flattened Device Tree)机制,将板级信息内容都从Linux内核中分离开来,用一个专属的文件格式来描述,即现在的.dts文件。
从 3.x 版本之后开始支持使用设备树,这样做的意义重大,可以实现驱动代码与设备的硬件信息相互的隔离,减少了代码中的耦合性。通过设备树对硬件信息的抽象,驱动代码只要负责处理逻辑,而关于设备的具体信息存放到设备树文件中,这样,如果只是硬件接口信息的变化而没有驱动逻辑的变化,开发者只需要修改设备树文件信息,不需要改写驱动代码。
设备树由一系列被命名的节点(Node)和属性(Property)组成,而节点本身可包含子节点。在设备树中,可描述的信息包括:
-
CPU的数量和类别。
-
内存基地址和大小。
-
总线和桥。
-
外设连接。
-
中断控制器和中断使用情况。
-
GPIO控制器和GPIO使用情况。
-
时钟控制器和时钟使用情况。
基本上就是画一棵电路板上CPU、总线、设备组成的树,Bootloader会将这棵树传递给内核,然后内核可以识别这棵树,并根据它展开出Linux内核中的platform_device、i2c_client、spi_device等设备,而这些设备用到的内存、IRQ等资源,也被传递给了内核,内核会将这些资源绑定给展开的相应的设备。
2. 基本概念介绍

2.1 dts
dts(device tree source设备树源文件)文件是一种ASCII文本格式的设备树描述文件,此文件适合人类阅读,主要是给用户看的。
硬件的相应信息都会写在.dts为后缀的文件中,每一款硬件可以单独写一份xxxx.dts,一般在Linux源码中存在大量的dts文件,对于 arm 架构可以在arch/arm/boot/dts找到相应的dts,另外mips则在arch/mips/boot/dts,powerpc在arch/powerpc/boot/dts。
对于imx6ull开发板
arch/arm/boot/dts/100ask_imx6ull_qemu.dts
dts中一般会包一个公共部分的dtsi文件,如下:
#include "imx6ull.dtsi"
2.2 dtsi
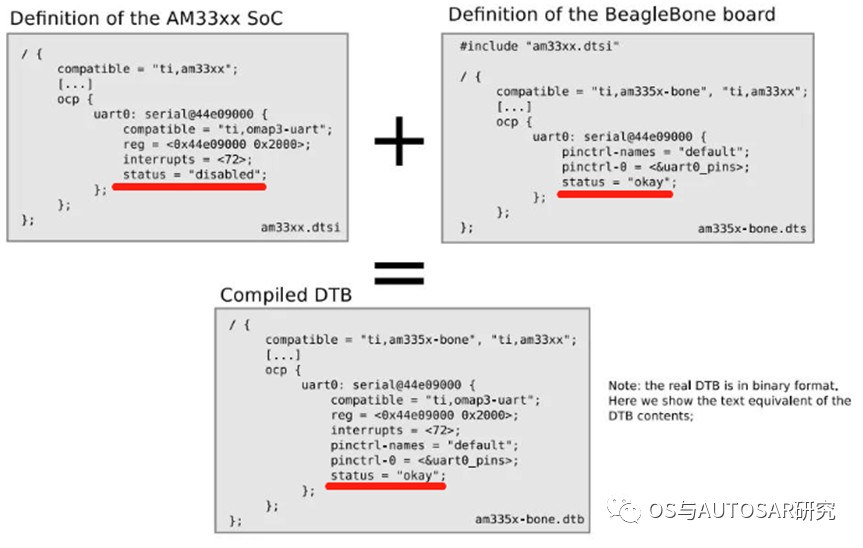
值得一提的是,对于一些相同的dts配置可以抽象到dtsi文件中,然后类似于 C 语言的方式可以include到dts文件中,对于imx6ull开发板arch/arm/boot/dts/imx6ull.dtsi
对于同一个节点的设置情况,dts中的配置会覆盖dtsi中的配置。具体如下图所示;
2.3 dtc
dtc是编译dts的工具,可以在Ubuntu系统上通过指令apt-get install device-tree-compiler安装dtc工具,不过在内核源码scripts/dtc路径下已经包含了dtc工具;
2.4 dtb
dtb(Device Tree Blob),dts经过dtc编译之后会得到dtb文件,dtb通过Bootloader引导程序加载到内核。所以Bootloader需要支持设备树才行;Kernel 也需要加入设备树的支持;
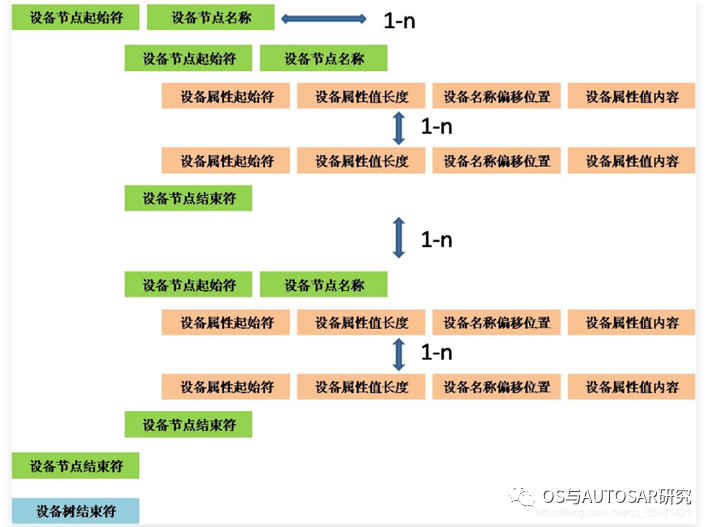
dtb文件布局如下:
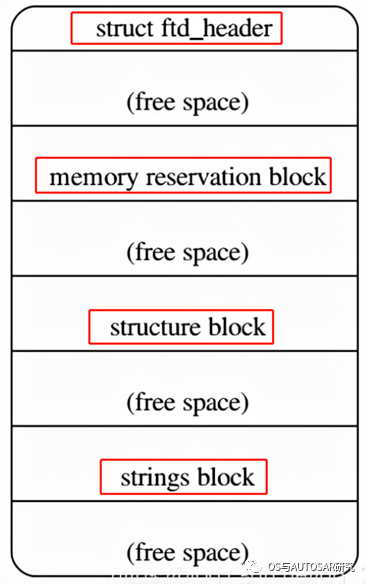
从上图可以看出,DTB文件主要包含四部分内容:
-
struct ftdheader:用来表明各个分部的偏移地址,整个文件的大小,版本号等;
-
memory reservation block:在设备树中使用/memreserve/ 定义的保留内存信息;
-
structure block:保存节点的信息,节点的结构;
-
strings block:保存属性的名字,单独作为字符串保存;
dtb文件代码级别的解析可以参考:
https://cloud.tencent.com/developer/article/1887823
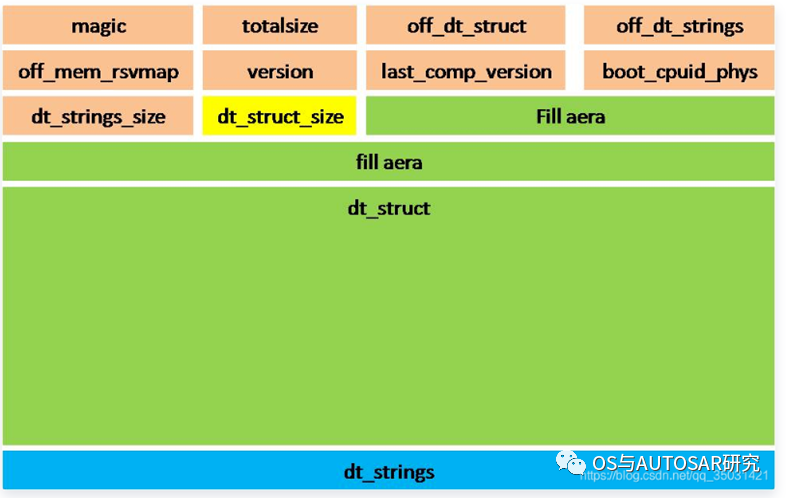
(1) dtb 文件的结构图如下:
(2) 设备节点的结构图如下:
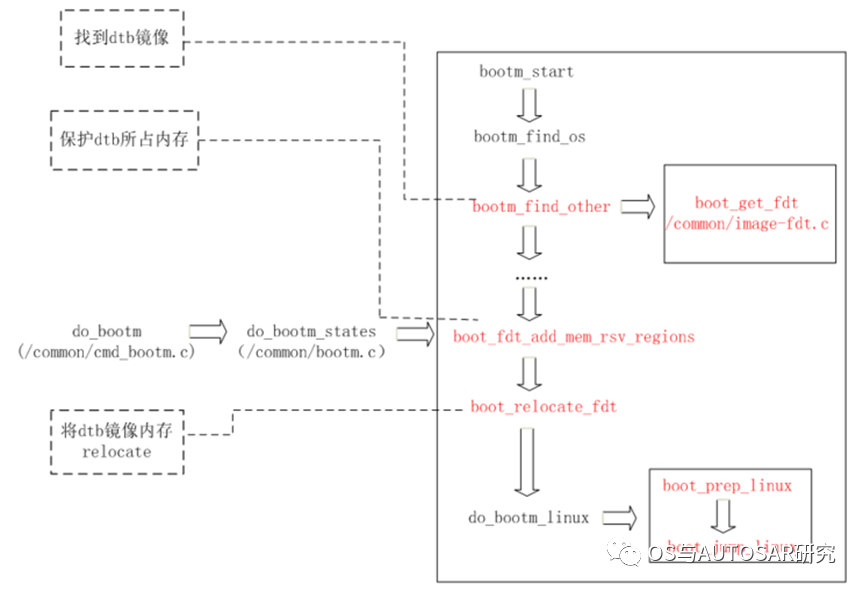
2.5 DTB加载及解析过程
U-Boot处理如下:
3. DTS基本框架
下图是一个设备树文件的基本架构;大概看了一下有点类似于XML文件,简单概括一下有这几个部分;
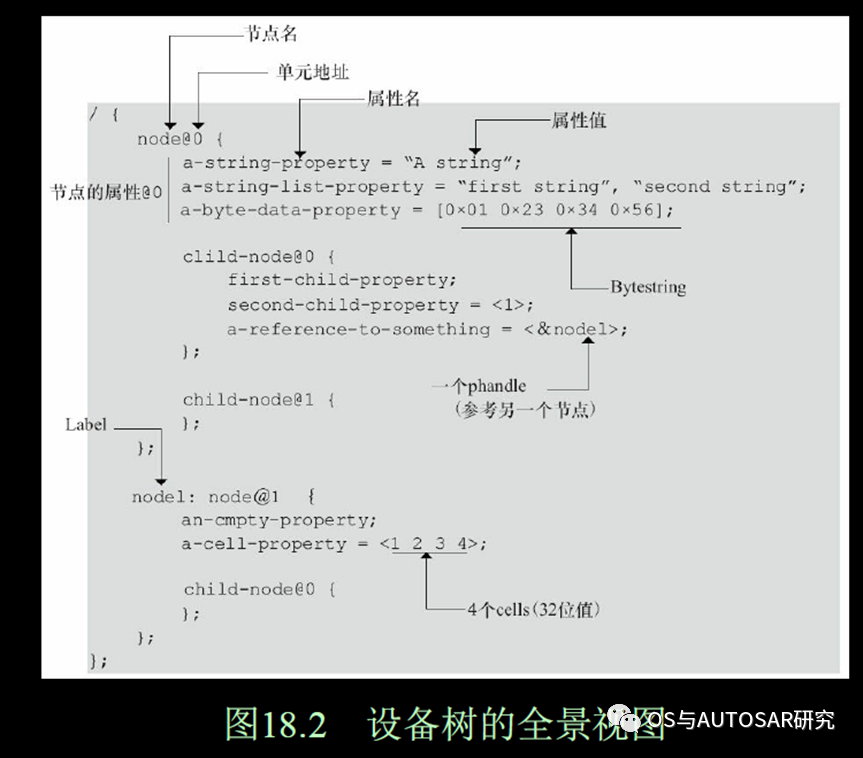
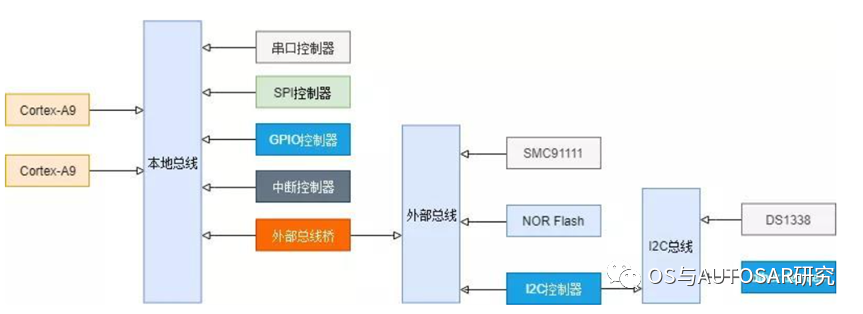
一个例子:
1 个双核ARM Cortex-A932 位处理器;ARM 本地总线上的内存映射区域分布有
两个串口(分别位于0x101F1000和0x101F2000)
GPIO控制器(位于0x101F3000)
SPI控制器(位于0x10170000)
中断控制器(位于0x10140000)
外部总线桥上连接的设备如下:
SMC SMC91111以太网(位于0x10100000)
I2C控制器(位于0x10160000)
64MB NOR Flash(位于0x30000000)
外部总线桥上连接的 I2C 控制器所对应的 I2C 总线上又连接了Maxim DS1338实时钟(I2C 地址为0x58)具体如下图所示;
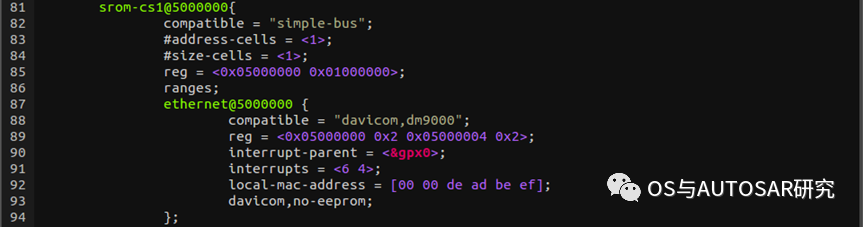
一个移植网卡的例子:
比如dm9000网卡,就需要首先将示例信息挂接到我们的板级设备树上,并根据芯片手册和电路原理图将相应的属性进行配置,再配置相应的驱动。需要注意的是,dm9000的地址线一般是接在片选线上的,所以设备树中就应该归属与相应片选线节点,我这里用的exynos4412,接在了bank1,所以是"<0x50000000 0x2 0x50000004 0x2>"
最终的配置结果是:
然后make menuconfig勾选相应的选项将dm9000的驱动编译进内核。
[*] Networking support ---> Networking options ---> <*> Packet socket <*>Unix domain sockets [*] TCP/IP networking [*] IP: kernel level autoconfigurationDevice Drivers ---> [*] Network device support ---> [*] Ethernet driver support (NEW) ---> <*> DM9000 supportFile systems ---> [*] Network File Systems (NEW) ---> <*> NFS client support [*] NFS client support for NFS version 3 [*] NFS client support for the NFSv3 ACL protocol extension [*] Root file system on NFS执行make uImage;make dtbs,tftp下载,成功加载nfs根文件系统并进入系统,表示网卡移植成功
详细语法参考:https://www.cnblogs.com/xiaojiang1025/p/6131381.html
4. 修改DTS试验
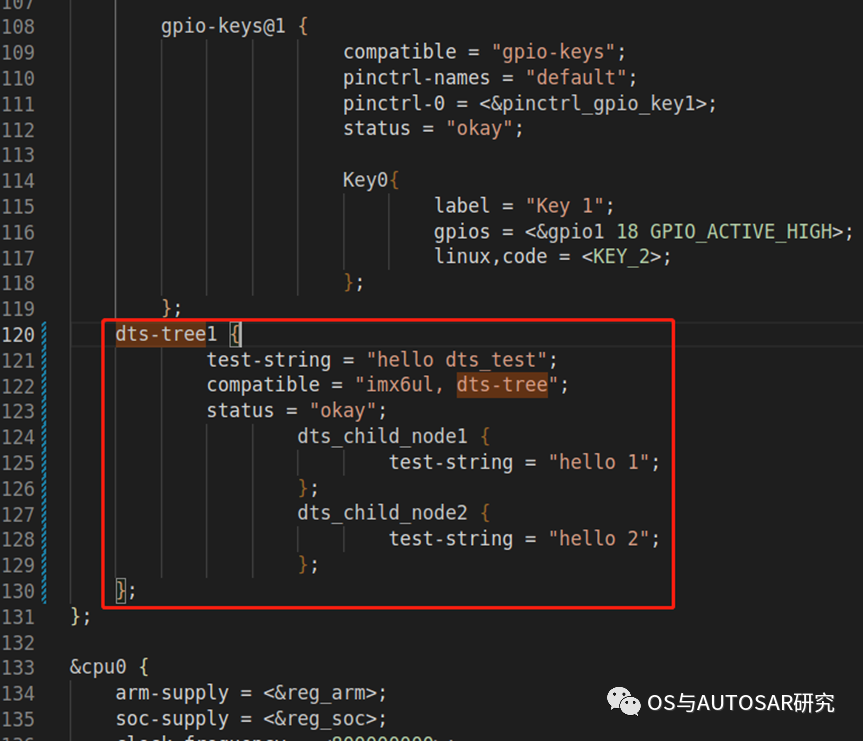
4.1 dts修改
修改设备树文件
arch/arm/boot/dts/100ask_imx6ull_qemu.dts,添加一个我们自己的模块dts_tree1:
修改完成后执行make dtbs 重新编译设备树文件,编译完成后arch/arm/boot/dts/100ask_imx6ull_qemu.dtb,将其下载到芯片中。
或者用qemu运行的时候,修改参考指向这个新的dtb文件。
查看设备树节点进入内核,执行
| ls /proc/device-tree/ |
我们会发现刚刚创建的设备树节已经存在了
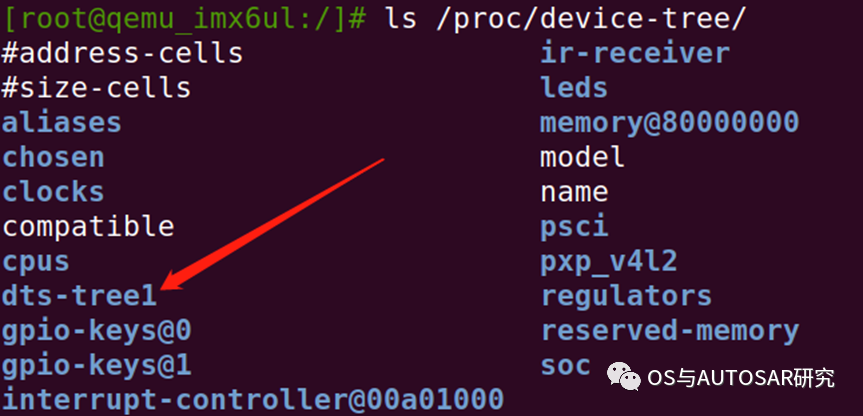

跟我们在dts里面修改的一样,这里变成了一个个的文件形式。文件的名字是属性的名字,内容是值。
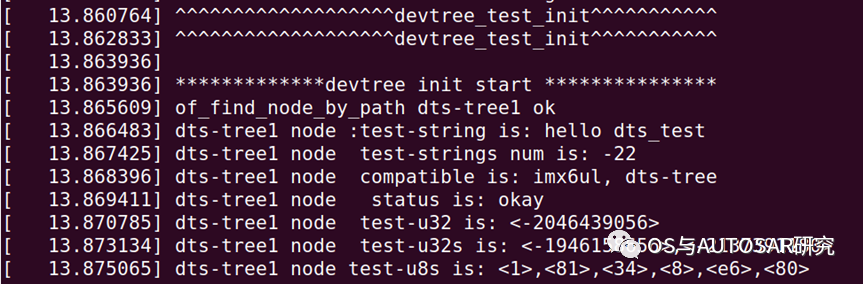
具体看看节点的内容,执行

4.2 内核中添加驱动模块
参考:Linux驱动实践:带你一步一步编译内核驱动程序 - IOT物联网小镇 - 博客园
在/drivers文件夹下创建dts_test文件夹,然后创建Kconfig文件
| Bash |
创建Makefile文件
| JavaScript |
在drivers文件夹下的Kconfig和Makefile文件中分别添加
| C |
创建dts_test.c文件
| C++ |
Kconfig中是y,这样系编译运行后,会直接看到打印:
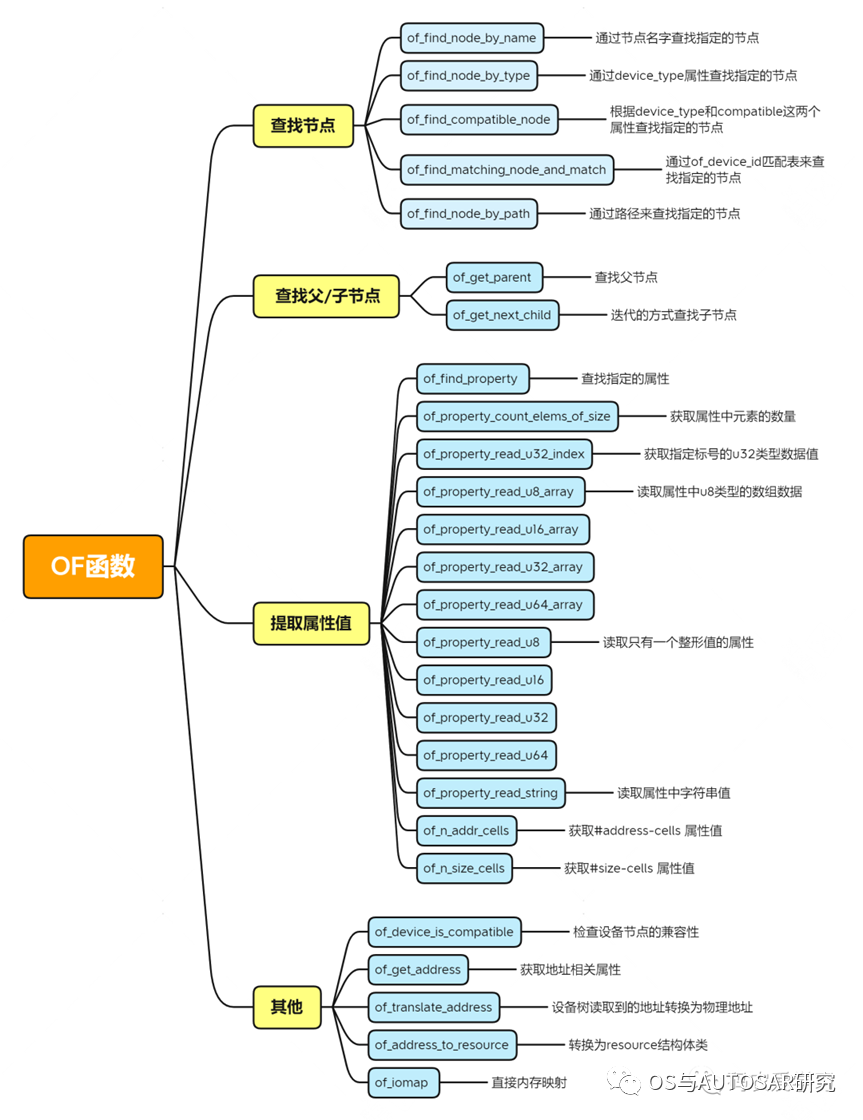
4.3 常用OF API
linux 内核中和设备树相关的函数内核关于设备树的驱动都放在/drivers/of下,用户可以使用这里面的函数对设备树进行操作。
后记:
入门系列还是比较适合公众号,一些零碎的拓展知识面学习。总感觉这种查询式的学习不利于系统的掌握一项技能,可以这么说:高手都不是这么学习的。答案估计是实际的工作经验+看书。系统深入的学习技术首先科班出身很重要,例如计算机专业四大专业课,然后就是对计算机经典书籍的阅读。
在工作中可能遇到问题了,查点资料,感觉可能也就学了点奇巧淫技,这里需要把经验性的知识和理论性的知识区分开,这就是科学与技术的区别,经验性的知识没有师傅带就完蛋了,可以多寻求帮助,但是理论性的东西就需要看书,愿大家能沉下心来找点经典大部头书“读上那么一读,确实挺不错的”。
相关文章:
Linux系统中驱动入门设备树DTS(经典)
设备树(DTS:device tree source),字面意思就是一块电路板上设备如上图中CPU、DDR、I2C、GPIO、SPI等,按照树形结构描绘成的一棵树。按照策略和功能分离的思路,就是驱动代码(功能)和设备树DTS配置…...

关系型数据库与非关系型数据库类比
关系型数据库和非关系型数据库都有多种不同类型,每种类型都针对不同的数据存储需求和使用场景。以下是一些常见的关系型数据库和非关系型数据库类型: 关系型数据库类型: MySQL: 一种开源的关系型数据库管理系统,用于处…...
Ubuntu入门03——Ubuntu用户操作
1.Ubuntu如何进入root用户 进入ROOT用户的指令: Linux用su命令来切换用户: su root执行命令后,会提示你输入密码,而Ubuntu是没有设置root初始密码的。 若su命令不能切换root,提示su: Authentication failure&#x…...
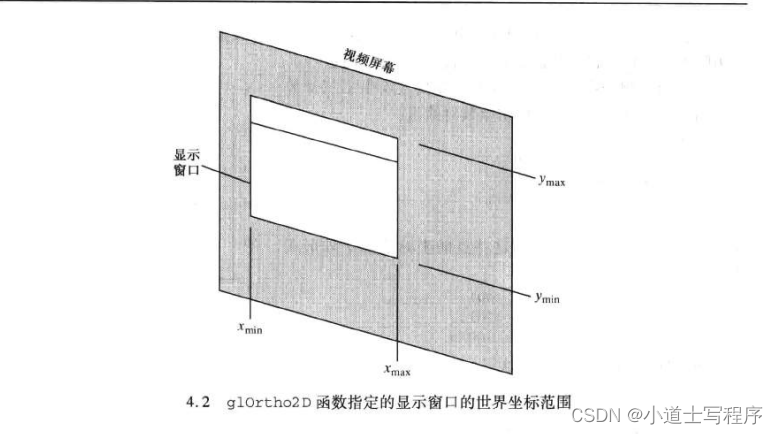
输出图元(四)8-1 图元、屏幕坐标、指定二维世界坐标系统
用于图形应用的通用软件包称为计算机图形应用编程接口(CCAPI)它提供可以在C等程序设计语言中用来创建图形的函数库。如第3 章所指出的,函数库可以分成几种类型。创建图形时最先要做的一件事就是要描述显示场景的组成部分。图形的组成部分可以是树木和地形家具和墙壁…...
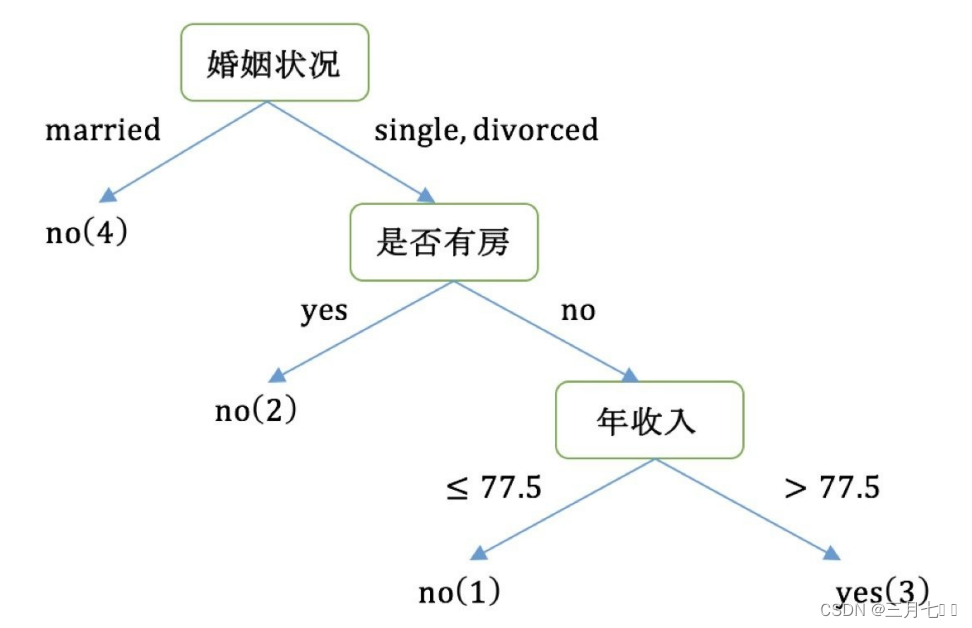
机器学习---决策树的划分依据(熵、信息增益、信息增益率、基尼值和基尼指数)
1. 熵 物理学上,熵 Entropy 是“混乱”程度的量度。 系统越有序,熵值越低;系统越混乱或者分散,熵值越⾼。 1948年⾹农提出了信息熵(Entropy)的概念。 从信息的完整性上进⾏的描述:当系统的有序…...

java解析json
1. 解析根节点为“{}”的json {"id": 1525490,"name": "有缘网" }代码: String jsonString "{\"id\":1525490\",\"name\":\"有缘网\"}";JSONObject jsonObject JSONObject.…...

PAT 1163 Dijkstra Sequence
个人学习记录,代码难免不尽人意。 Dijkstra’s algorithm is one of the very famous greedy algorithms. It is used for solving the single source shortest path problem which gives the shortest paths from one particular source vertex to all the other v…...
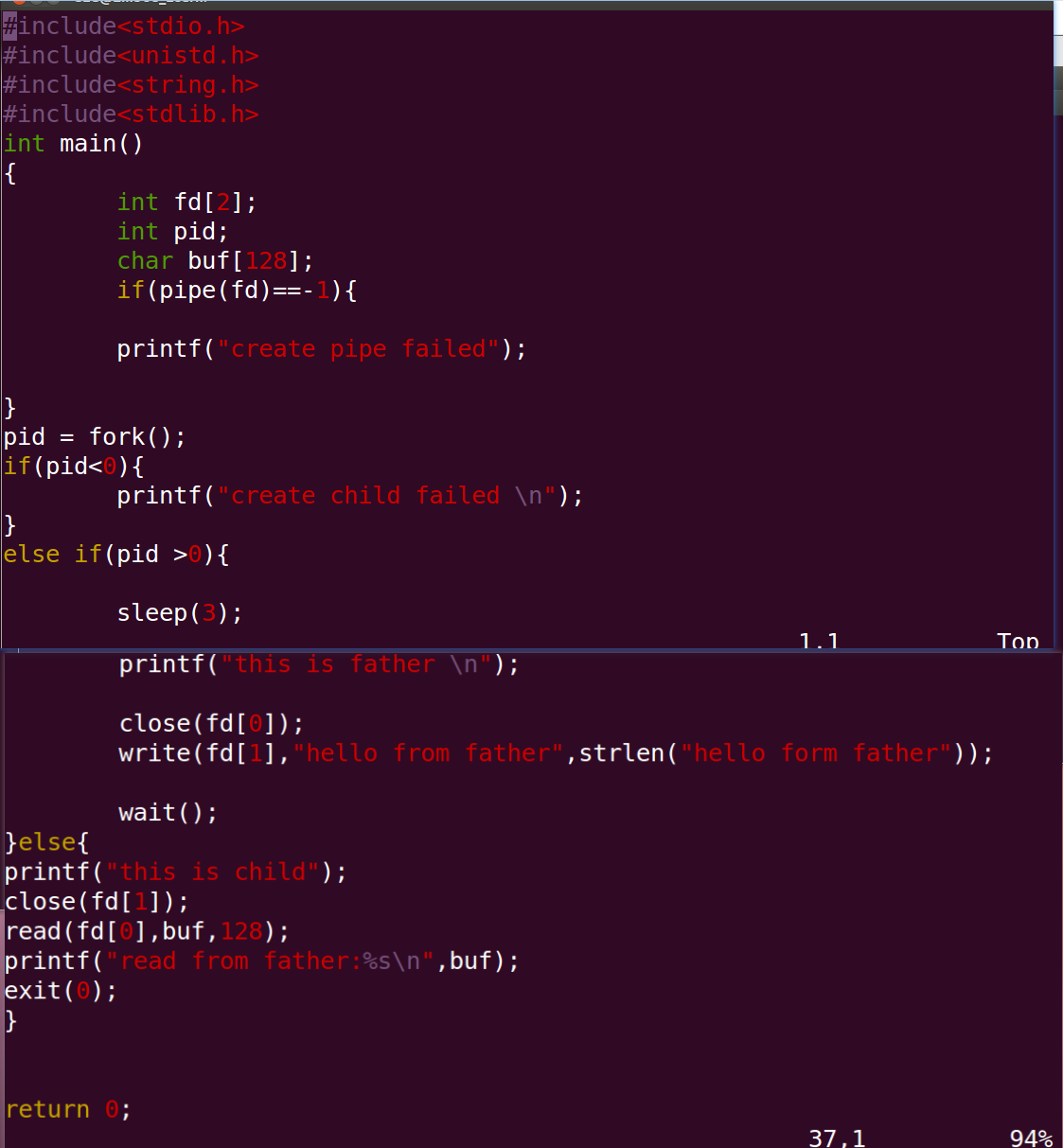
嵌入式学习之进程
1.进程间通信概述 UNIX系统IPC是各种进程通信方式的统称。 2.管道通信原理 特点: 1.它是半双工的(即数据只能在一个方向上流动),具有固定的读端和写端。 2.它只能用于具有亲缘关系的进程之间通信(也是父子进程或者…...
C#-单例模式
文章目录 单例模式的概述为什么会有单例模式如何创建单例模式1、首先要保证,该对象 有且仅有一个2、其次,需要让外部能够获取到这个对象 示例通过 属性 获取单例 单例模式的概述 总结来说: 单例 就是只有 一个实例对象。 模式 说的是设计模式…...

WSNs 安全技术
WSNs 多用于军事,特殊现场的警戒保护、商业区域的安防,作为任务型网 络,不仅要进行数据传输,而且要进行数据采集和融合,任务的协同控制等,如何 保证任务执行的机密性,数据产生的可靠性数据融合…...

H5如何做页面下拉刷新和上拉加载
这里以vant为例 结构 <van-pull-refreshv-model"isLoading"success-text"刷新成功"refresh"onRefresh"><van-liststyle"height:100%"v-model"loading":finished"finished"finished-text"没有更多了…...

Camunda 7.x 系列【42】事件子流程
有道无术,术尚可求,有术无道,止于术。 本系列Spring Boot 版本 2.7.9 本系列Camunda 版本 7.19.0 源码地址:https://gitee.com/pearl-organization/camunda-study-demo 文章目录 1. 概述2. 案例演示2.1 流程模型2.2 测试1. 概述 事件子流程是由事件触发的子流程,可存在…...
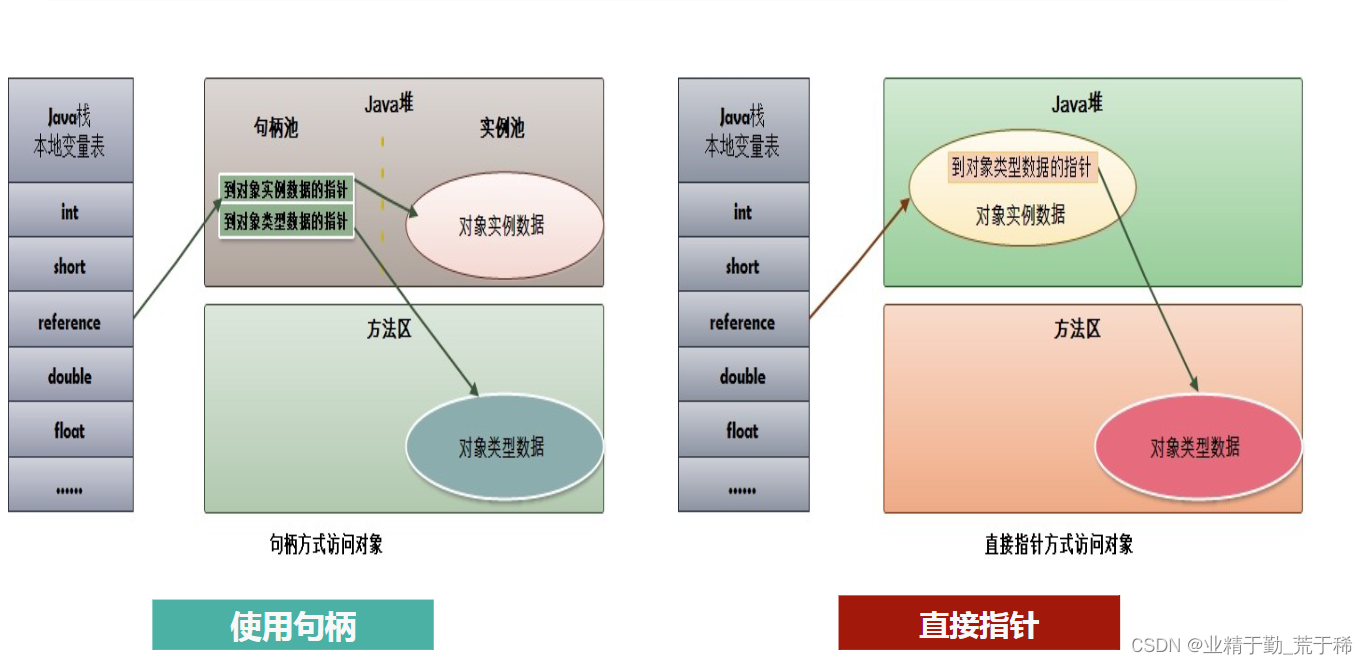
JVM类的加载过程
加载过程 JVM的类的加载过程分为五个阶段:加载、验证、准备、解析、初始化。 加载 加载阶段就是将编译好的的class文件通过字节流的方式从硬盘或者通过网络加载到JVM虚拟机当中来。(我们平时在Idea中书写的代码就是放在磁盘中的,也可以通…...
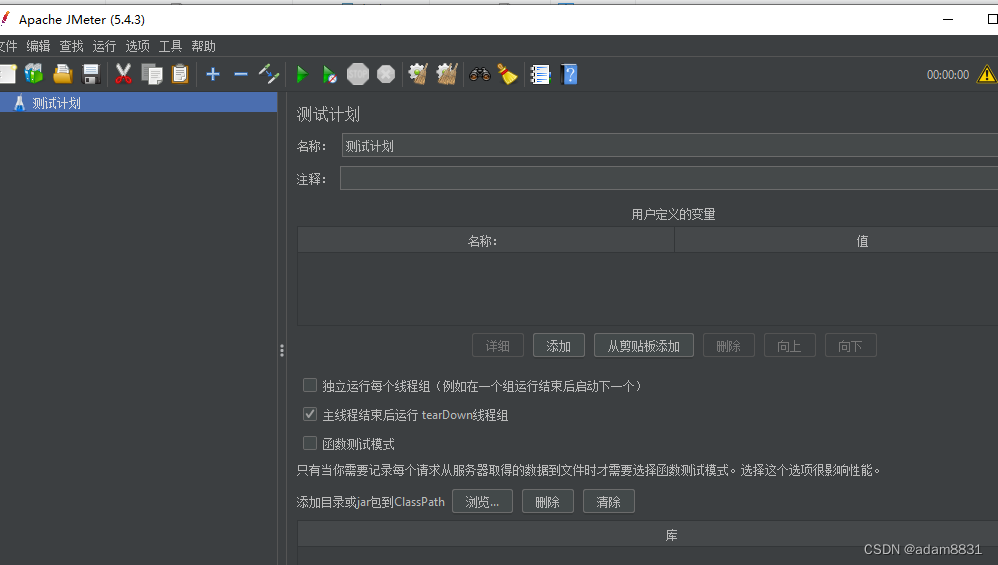
Jmeter如何设置中文版
第一步:找到 apache-jmeter-5.4.3\bin目录下的 jmeter.properties 第二步:打开 三,ctrf 输入languageen,注释掉,增加以行修改如下 四,ctrs 保存修改内容,重新打开jmeter就可以了...

flutter自定义按钮-文本按钮
目录 前言 需求 实现 前言 最近闲着无聊学习了flutter的一下知识,发现flutter和安卓之间,页面开发的方式还是有较大的差异的,众所周知,android的页面开发都是写在xml文件中的,而flutter直接写在代码里(da…...

无涯教程-Android - CheckBox函数
CheckBox是可以由用户切换的on/off开关。为用户提供一组互不排斥的可选选项时,应使用复选框。 CheckBox 复选框属性 以下是与CheckBox控件相关的重要属性。您可以查看Android官方文档以获取属性的完整列表以及可以在运行时更改这些属性的相关方法。 继承自 android.widget.T…...

[Go版]算法通关村第十五关青铜——用4KB内存寻找重复元素
目录 题目:用4KB内存寻找重复元素思路分析:使用位存储如何存储这32000个整数?每个整数对应在位图中的存储状态举例如何判断是重复的?具体的步骤 复杂度:时间复杂度 O ( n ) O(n) O(n)、空间复杂度 O ( 1 ) O(1) O(1)Go…...
OJ练习第159题——消灭怪物的最大数量
消灭怪物的最大数量 力扣链接:1921. 消灭怪物的最大数量 题目描述 你正在玩一款电子游戏,在游戏中你需要保护城市免受怪物侵袭。给你一个 下标从 0 开始 且长度为 n 的整数数组 dist ,其中 dist[i] 是第 i 个怪物与城市的 初始距离&#…...
)
Prometheus-Rules(规则)
文章目录 一、介绍二、配置 Prometheus 使用规则文件三、 规则文件语法规则文件语法全局Recording rules(记录规则)2 Alerting rules(警报规则)3 模板化如何使用四、检查规则文件语法五、发送警报通知一、介绍 Prometheus规则是一种逻辑表达式,可用于定义有关监控数据的逻…...
打卡智能中国(六):村里出了“飞行员”
提起返乡青年,你的第一印象是什么?失败、躺平、卷不动了? 我们在浙江、福建、青海等地,参观一些农业智能化项目时,陪同参观的“飞手”,高兴地跟我们分享自己的心路历程: 在家门口做农业无人机操…...

5分钟掌握PESQ:Python语音质量评估终极指南
5分钟掌握PESQ:Python语音质量评估终极指南 【免费下载链接】PESQ PESQ (Perceptual Evaluation of Speech Quality) Wrapper for Python Users (narrow band and wide band) 项目地址: https://gitcode.com/gh_mirrors/pe/PESQ 想要客观评估语音处理算法效果…...

新型macOS Infinity窃密木马利用Nuitka Python载荷与ClickFix传播
首例针对macOS的ClickFix攻击活动Malwarebytes研究人员发现名为Infinity Stealer的新型macOS信息窃取木马,该木马使用Nuitka编译的Python载荷,通过伪造Cloudflare验证页面诱骗用户执行终端命令进行传播。据Malwarebytes报告指出,这是首次观察…...

CANoe Trace中的Time列:从基础定义到高级时序分析实战
1. CANoe Trace中的Time列基础解析 第一次打开CANoe的Trace窗口时,那排密密麻麻的数据确实让人头皮发麻。但别担心,咱们先来搞定最左边那个看似简单却至关重要的Time列。这个时间戳就像车载网络的"心电图"记录仪,精确到微秒级别地记…...

【Python内存管理黄金法则】:20年SRE亲授生产环境OOM崩溃前的5个关键干预点
第一章:Python智能体内存管理策略的底层认知与生产意义Python智能体(如基于LLM的Agent系统)在长时间运行、多轮对话与状态缓存场景下,内存行为远超传统脚本应用。其内存压力不仅来自模型权重加载,更源于动态生成的中间…...

Phi-4-mini-reasoning真实案例:教育SaaS平台月均百万次推理调用的稳定性保障
Phi-4-mini-reasoning真实案例:教育SaaS平台月均百万次推理调用的稳定性保障 1. 项目背景与挑战 在教育科技行业,数学和逻辑推理类题目的自动解答一直是技术难点。某头部教育SaaS平台在2023年接入了Phi-4-mini-reasoning模型,用于其在线作业…...

AudioLDM-S极速音效生成:5分钟搞定游戏音效,小白也能当音效师
AudioLDM-S极速音效生成:5分钟搞定游戏音效,小白也能当音效师 1. 游戏音效制作的新纪元 想象一下这样的场景:你正在开发一款独立游戏,需要一个"科幻飞船引擎启动"的音效。传统方式可能需要花费数小时搜索音效库、购买…...

Krita AI Diffusion IP-Adapter功能异常深度排查与解决方案
Krita AI Diffusion IP-Adapter功能异常深度排查与解决方案 【免费下载链接】krita-ai-diffusion Streamlined interface for generating images with AI in Krita. Inpaint and outpaint with optional text prompt, no tweaking required. 项目地址: https://gitcode.com/g…...

5块钱的国产RISC-V芯片CH32V103能干啥?我用它复刻了一个STM32F103的小项目
5元国产RISC-V芯片实战:用CH32V103复刻STM32经典项目 在电子DIY领域,成本始终是创客们无法回避的现实问题。当我在某电商平台发现CH32V103这颗标价仅5元的RISC-V芯片时,第一反应是怀疑它的实用性——毕竟同级别的STM32F103C8T6价格通常在15-2…...

何时DCDC预降压+LDO二次线性稳压?
LDO 核心选型分界结论及优化要点核心选型分界结论以LDO输入输出压差ΔV为核心判断指标,结合输出功率、场景约束,通用选型规则如下:通用强制分界点:当ΔV≥2V,且输出功率≥100mW(对应你之前的5V转3V70mA工况…...
李慕婉-仙逆-造相Z-Turbo AI核心原理科普:如何用Transformer理解并生成人类语言
李慕婉-仙逆-造相Z-Turbo AI核心原理科普:如何用Transformer理解并生成人类语言 你有没有想过,当你和“李慕婉-仙逆-造相Z-Turbo”这样的AI模型对话时,它到底是怎么“听懂”你的话,又“想”出那些回答的?它不像我们人…...