【DRONECAN】(三)WSL2 及 ubuntu20.04 CAN 驱动安装
【DRONECAN】(三)WSL2 及 ubuntu20.04 CAN 驱动安装
前言
这一篇文章主要介绍一下 WSL2 及 ubuntu20.04 CAN 驱动的安装,首先说一下介绍本文的目的。
大家肯定都接触过 ubuntu 系统,但是我们常用的操作系统都是 Windows,想要切换到 ubuntu 系统要么装虚拟机,要么装双系统。双系统必然是麻烦的,而且得两个系统来回切换,而虚拟机的代表就是 vmware,简单的使用还行,但是涉及到三维仿真就会比较卡顿了,而且占用资源也是比较大的。WSL2(Windows Subsystem for Linux 2)是 Windows 10 操作系统中的一个功能,用于在 Windows 系统中运行 Linux 环境,以便用户可以在 Windows 系统中使用 Linux 的命令行工具和应用程序。它是一种虚拟化技术,通过在 Windows 系统上运行一个轻量级的 Linux 内核来实现。注意,相比较于 WSL 1 使用翻译层将 Linux 系统调用转化成 Windows 系统调用,WSL2 是有一个 Linux 内核,只不过微软做了一些裁剪。
因此,WSL2 更适合做 Linux 开发。所以,目前我也沉迷用 WSL2 做 Linux 开发,例如在 WSL2 做 Ardupilot 开发、GAZEBO 仿真等等,都是基于 WSL2 有一个 Linux 的内核。
安装 WSL2
WSL2 安装就很容易,网上也有很多教程,总结一下就是:
1、检查更新 win10 版本
在 cmd 中使用 winver 命令来检查当前 win 的版本,如果版本太低,可以在 设置 - 更新和安全 - Windows 更新中更新。但是有时候会没有提示能更新到最新的版本,那就可以使用微软提供的更新助手。
2、启用虚拟功能
在 powerShell 中以管理员身份运行下面命令以确保开启适用于 Linux 的 Windows 子系统和虚拟机平台配置项。
dism.exe /online /enable-feature /featurename:Microsoft-Windows-Subsystem-Linux /all /norestart
dism.exe /online /enable-feature /featurename:VirtualMachinePlatform /all /norestart
3、下载 Linux 内核更新程序包
下载地址:
https://wslstorestorage.blob.core.windows.net/wslblob/wsl_update_x64.msi
下载安装即可。
4、安装Linux分发版本
在微软商店搜索 Ubuntu20.04,在列表中选择最新的长期支持版本 20.04 LTS 并安装启动
5、确保 WSL 的版本为2.0
使用wsl -l -v命令查看安装版本是否正确(VERSION为2)
如果显示当前不是 WSL 2 版本,可以通过以下命令设置 WSL 的默认版本:
wsl --set-version Ubuntu-20.04 2
WSL2 Ubuntu20.04配置
安装完成后,我们首先需要把源替换为国内镜像,当然有代理的话也可以不换源
1、备份源列表
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
2、命令行打开sources.list文件
sudo vim /etc/apt/sources.list
3、将源文件内容全部注释,并添加以下任意源
阿里云源
deb http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiversedeb http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiversedeb http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiversedeb http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe multiversedeb http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse
清华源
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal main restricted
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates main restricted
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-backports main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-security main restricted
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-security universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-security multiverse
4、更新源
sudo apt-get update
sudo apt-get upgrade
5、WSL2代理配置
参考:
https://blog.csdn.net/m0_46680603/article/details/128769706
WSL2 安装 CAN 驱动
WSL2 Ubuntu发行版默认是不支持socketCAN的,这意味着使用WSL2无法正常进行硬件CAN调试工作。由于WSL2支持完整的linux内核,因此可以通过自行编译并替换linux内核的方式,实现WSL2对CAN的支持。
下载wsl内核源码
首先查看内核版本
uname -r
输出内核版本,如我是5.15.90.3-microsoft-standard-WSL2
这里我们要去下载Linux内核源码,再把CAN驱动编译进去。
git clone https://github.com/microsoft/WSL2-Linux-Kernel.git
cd WSL2-Linux-Kernel
git checkout linux-msft-wsl-5.15.90.3
修改配置文件
安装依赖:
sudo apt update
sudo apt install build-essential flex bison libssl-dev libelf-dev libncurses-dev autoconf libudev-dev libtool
cp Microsoft/config-wsl .config
sudo make menuconfig
在Networking support—>CAN BUS subsystem support下面,按M把他们和他们下面的选项都变成module,把能选的全选了,按M没反应变不成module的就按y让它变成build-in的,类似这样,注意每一级都要选,别漏掉了


然后最下面save,命名为.config。可以手动改一下文件里面的:CONFIG_LOCALVERSION="-microsoft-standard-WSL2"选项,改成别的名字,这里我改成了“5.15.90.3-microsoft-standard-WSL2-CAN”
编译安装
编译:
sudo make -j12 #有几个核就写几个
sudo make modules_install
sudo make install
安装:
把bzImage复制到WSL系统外并且添加配置文件告诉WSL它在哪:
cp arch/x86/boot/bzImage /mnt/c/Users/windows你的用户名/can_bzImage
然后在c/Users/路径下创建.wslconfig文件,以文本方式打开并键入:
[wsl2]
kernel=C:\\Users\\xxxxx\\刚刚bzImage的名字不带后缀
重启WSL2:
wsl --shutdown
应该能看到自己起的名字
uname -r

安装can工具驱动:
sudo apt install can-utils
设置CAN驱动:
sudo modprobe can
sudo modprobe can-raw
sudo modprobe can-gw
设置虚拟CAN
sudo modprobe vcansudo ip link add dev vcan0 type vcan
sudo ip link add dev vcan1 type vcan
sudo ip link set up vcan0
sudo ip link set up vcan1
然后把vcan0和vcan1连接起来:
sudo cangw -A -s vcan0 -d vcan1 -e
控制台1监控vcan1接收到的数据:
sudo candump vcan1控制台2通过vcan0发送数据:
cansend vcan0 123#0011
出现下面的界面,则说明CAN驱动已经编译安装好了。

WSL2挂载USB CAN设备
Linux对CAN的支持比Windows更友好,因为Linux有SocketCAN这层协议,SocketCAN可以把许多标准的CAN协议转换成Socket套接字方式的网络协议(网上那种自带串口上位机的非标准协议USB转CAN模块除外),因此扩展性和兼容性更强,而Windows没有。。。所以这也是选择WSL2的原因之一。
这里我使用的是Pogo科技的CANv2模块,内置SLCAN协议,在Linux系统下可以转换成SocketCAN协议,在Windows系统也可以直连DroneCAN_GUI_TOOL,对调试DroneCAN来说非常方便,可从淘宝购买:https://item.taobao.com/item.htm?spm=a21n57.1.0.0.aa72523c7Y5zQv&id=734695507467&ns=1&abbucket=15#detail:

当wsl2中使用usb设备时,必须先将其从windows挂到wsl中,WSL2 本身并不支持连接 USB 设备,所以需要安装 usbipd-win。
第一步:
在管理员Powershell:
winget install --interactive --exact dorssel.usbipd-win
#重启wsl
wsl --shutdown
usbipd wsl list
第二步:
在wsl2中执行:
sudo apt install linux-tools-virtual hwdata
sudo update-alternatives --install /usr/local/bin/usbip usbip `ls /usr/lib/linux-tools/*/usbip | tail -n1` 20
第三步:
在管理员Powershell:
usbipd wsl list

图中出现的2-12就是我们要挂在WSL2的设备:
2-12 0483:5740 STMicroelectronics Virtual COM Port (COM39) Not attached
然后在管理员Powershell执行:
usbipd wsl attach --busid 2-12
第四步:
在wsl2中执行:
lsusb

出现了STMicroelectronics Virtual COM Port,则说明挂载成功。
WSL2中USB CAN和虚拟CAN互通
由于Pogo CANv2是SLCAN协议的CAN模块,执行下面命令:
sudo modprobe can
sudo modprobe can-raw
sudo modprobe can-gw
sudo modprobe slcan
sudo modprobe vcansudo slcand -o -c -s8 /dev/ttyACM2 can0sudo ifconfig can0 up输入ifconfig:

出现了can0、vcan0、vcan1,则说明USBCAN、虚拟CAN都连接到网络了。
然后输入下面指令,将can0和vcan0连起来,下面的意思就是把can0和vcan0连到同一局域网,vcan0会收到can0的数据,反过来写亦之:
sudo cangw -A -s can0 -d vcan0 -e
我这里将CANv2连到了CubeOrange飞控上:

然后打开两个终端,分别输入:sudo candump can0 sudo candump vcan0

可以看到图中,vcan0和can0收到了同样的数据
WSL2中DroneCAN_GUI_TOOL
使用SocketCAN的好处也是不言而喻的,在DroneCAN_GUI_TOOL中,不仅可以用USBCAN收发数据,也可以用vcan0,接上章,把can0和vcan0路由在一起后,即可以用can0连接在DroneCAN_GUI_TOOL中,也可以用vcan0连DroneCAN_GUI_TOOL,如下图所示。


所以,CAN在Linux中可以做更多的扩展,而Windows则实现不了,一个CAN就是一个CAN,而在Linux中,可以通过SocketCAN套接字的方式拓展成网络设备。因此,想要高级开发的话,还是选WSL2吧
相关文章:
【DRONECAN】(三)WSL2 及 ubuntu20.04 CAN 驱动安装
【DRONECAN】(三)WSL2 及 ubuntu20.04 CAN 驱动安装 前言 这一篇文章主要介绍一下 WSL2 及 ubuntu20.04 CAN 驱动的安装,首先说一下介绍本文的目的。 大家肯定都接触过 ubuntu 系统,但是我们常用的操作系统都是 Windows&#x…...
Databricks 入门之sql(二)常用函数
1.类型转换函数 使用CAST函数转换数据类型(可以起别名) SELECTrating,CAST(timeRecorded as timestamp) FROMmovieRatings; 支持的数据类型有: BIGINT、BINARY、BOOLEAN、DATE 、DECIMAL(p,s)、 DOUBLE、 FLOAT、 INT、 INTERVAL interva…...
Simulink建模与仿真(3)-Simulink 简介
分享一个系列,关于Simulink建模与仿真,尽量整理成体系 1、Simulink特点 Simulink是一个用来对动态系统进行建模、仿真和分析的软件包。使用Simulink来建模、分析和仿真各种动态系统(包括连续系统、离散系统和混合系统),将是一件非常轻松的事…...

(超简单)将图片转换为ASCII字符图像
将一张图片转换为ASCII字符图像 原图: 效果图: import javax.imageio.ImageIO; import java.awt.image.BufferedImage; import java.io.File; import java.io.FileWriter; import java.io.IOException;public class ImageToASCII {/*** 将图片转换为A…...

In-Context Retrieval-Augmented Language Models
本文是LLM系列文章,针对《In-Context Retrieval-Augmented Language Models》的翻译。 上下文检索增强语言模型 摘要1 引言2 相关工作3 我们的框架4 实验细节5 具有现成检索器的上下文RALM的有效性6 用面向LM的重新排序改进上下文RALM7 用于开放域问答的上下文RALM…...

多种免费天气api
多种免费天气api推荐 一、高德天气二、格点天气三、香港天文台 一、高德天气 api说明文档:https://lbs.amap.com/api/webservice/guide/api/weatherinfo 实例代码: import requests# 香港天文台API的URL api_url "https://restapi.amap.com/v3/w…...

深度学习推荐系统(五)DeepCrossing模型及其在Criteo数据集上的应用
深度学习推荐系统(五)Deep&Crossing模型及其在Criteo数据集上的应用 在2016年, 随着微软的Deep Crossing, 谷歌的Wide&Deep以及FNN、PNN等一大批优秀的深度学习模型被提出, 推荐系统全面进入了深度学习时代, 时至今日&am…...

图神经网络教程之HAN-异构图模型
异构图 包含不同类型节点和链接的异构图 异构图的定义:节点类别数量和边的类别数量加起来大于2就叫异构图。 meta-path元路径的定义:连接两个对象的复合关系,比如,节点类型A和节点类型B,A-B-A和B-A-B都是一种元路径。 …...
Jupyter lab 配置
切换jupyterlab的默认工作目录 在终端中输入以下命令 PS C:\Users\Administrator> jupyter-lab --generate-config Writing default config to: C:\Users\Administrator\.jupyter\jupyter_lab_config.py它就会生成JupyterLab的配置文件(如果之前有这个文件的话…...

股票行情处理:不复权,前复权,后复权
不复权的话,K线图能真实反应股价历史的除权信息,缺点是会留有大缺口,股价走势不连续,不能直观感受股价的涨跌波动。 前复权是以目前股价为基准复权,可以很清楚的看到股价的历史高点、低点,以及目前股价所处…...
ip地址、LINUX、与虚拟机
子网掩码,是用来固定网络号的,例如255,255,255,0,表明前面三段必须为网络号,后面必须是主机号,那么怎么实现网络复用呢,例如使用c类地址,但是正常子网掩码是255,255,255,…...

MySQL存储过程
存储过程 1、存储过程简介 存储过程与函数的直接效果类似,只不过存储过程,封装的是一组sql语句。 mysql数据库存储过程是一组为了完成特定功能的sql语句的集合。 存储过程这个功能时从5.0版本才开始支持的,它可以加快数据库的处理速度&…...

element-ui 自定义loading加载样式
element-ui 中的 loading 加载功能,默认是全屏加载效果, 设置局部,需要自定义样式,自定义的方法如下: import { Loading } from element-uiVue.prototype.$baseLoading (text) > {let loadingloading Loading.s…...
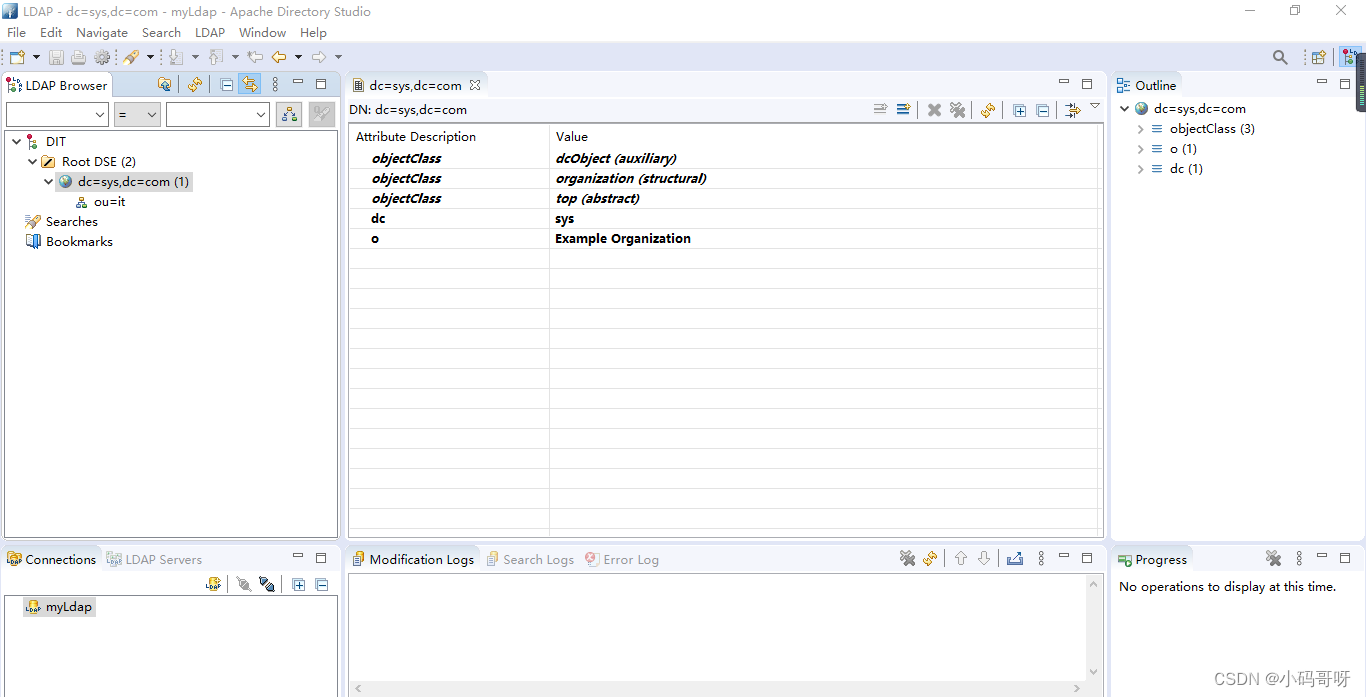
04-Apache Directory Studio下载安装(LDAP连接工具)
1、下载 官网下载Apache Directory Studio 注意Apache Directory Studio依赖于jdk,对jdk有环境要求 请下载适配本机的jdk版本的Apache Directory Studio,下图为最新版下载地址 Apache Directory Studio Version 2.0.0-M16 基于 Eclipse 2020-12,最低要…...
vmware虚拟机(ubuntu)远程开发golang、python环境安装
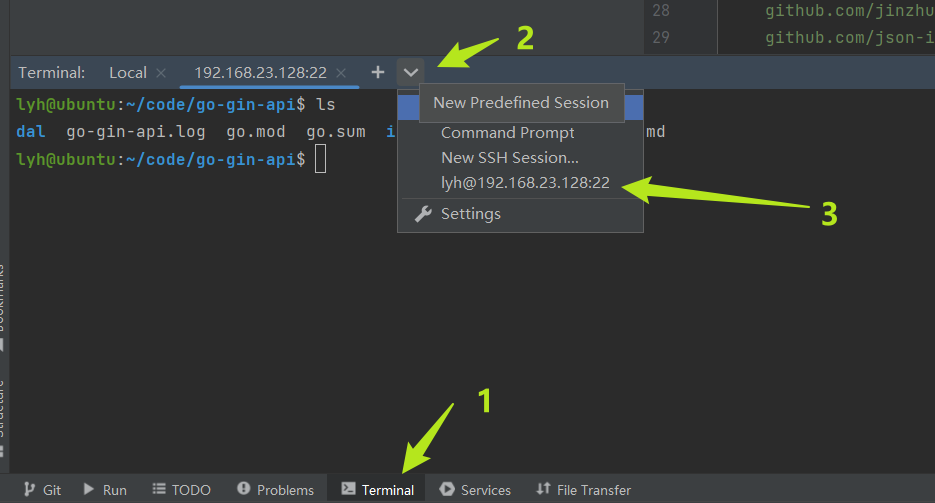
目录 1. 下载vmware2. 下载ubuntu镜像3. 安装4. 做一些设置4.1 分辨率设置4.2 语言下载4.3 输入法设置4.4 时区设置 5. 直接切换管理员权限6. 网络6.1 看ip6.2 ssh 7. 本地编译器连接远程服务器7.1 创建远程部署的配置7.2 文件同步7.3 远程启动项目 8. ubuntu安装golang环境8.1…...

Elasticsearch文档多个输入字段组成ID实现方法
1、场景描述: 使用Elasticsearch时,有时会需要指定文档id的场景,当文档id需要多个字段组成时,这种业务怎么处理呢? 2、问题描述: 现有一个ElasticSearch文档,假设文档id由userid、 eventTime…...
rdynamic选项的用途)
编译链接实战(15)rdynamic选项的用途
文章目录 rdynamic作用栈回溯 rdynamic作用 看下gcc man手册的解释: Pass the flag -export-dynamic to the ELF linker, on targets that support it. This instructs the linker to add all symbols, not onlyused ones, to the dynamic symbol table. This opti…...
前端:js实现提示框(自动消失)
效果: 代码: <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta http-equiv"X-UA-Compatible" content"IEedge"><meta name"viewport" content&q…...

powerpc架构的前世今生
文章目录 Powerpc架构的前世今生什么是powerpc?PowerPC和ARM有什么区别呢? Powerpc架构的前世 PowerPC架构是一种基于精简指令集计算机(RISC)的处理器架构。它最初由IBM、Motorola和Apple共同开发,旨在为个人电脑、工…...

SQL-存储过程、流程控制、游标
存储过程 存储过程概述 1.产生背景 开发过程总,经常会遇到重复使用某一功能的情况 2.解决办法 MySQL引人了存储过程(Stored Procedure)这一技术 3.存储过程 存储过程就是一条或多条SQL语句的集合存储过程可将一系列复杂操作封装成一个代码块,以便…...
)
保姆级教程:在ArcGIS Pro插件中集成你的自定义工具箱(以‘消除重复要素’为例)
从脚本到按钮:ArcGIS Pro插件开发实战指南 在GIS日常工作中,我们常常会遇到一些重复性的数据处理任务。比如数据质检环节的"消除重复要素"操作,虽然可以通过Python脚本实现,但每次都需要打开IDE或Python窗口执行代码&am…...

ARM指令追踪技术及TRCVICTLR寄存器详解
1. ARM指令追踪技术概述在嵌入式系统开发和调试过程中,指令追踪(Instruction Trace)是一项至关重要的技术。它通过硬件机制记录处理器的执行流程,为开发者提供程序运行的完整轨迹。ARM架构从v7开始引入嵌入式跟踪宏单元࿰…...

诚信标签工厂端解决方案 适配俄标 CRPT 体系一体化技术方案
俄罗斯诚实标签依托 CRPT 体系执行强制管控,各类出口货品必须完成 Data Matrix 编码采集、格式转换、多层包装数据绑定,数据合规后方可通关流通。美妆食品、日化建材、玩具五金等品类包装形态差异较大,人工采集方式普遍存在识别精度不足、批量…...

【2026最新】应对Turnitin查重:实测5大英文查降AI宝藏工具,一站式搞定初稿
现在的英文初稿,无论是期刊文章、SCI 还是普通的 Course Essay,基本都需要评估内容的原创度,进行文章 AI 率检测。很多伙伴以为纯手敲就能过,结果一查数据依然不尽如人意。 针对英文内容,咱们必须使用专门的英文检测和…...

终极艾尔登法环帧率解锁指南:轻松突破60FPS限制
终极艾尔登法环帧率解锁指南:轻松突破60FPS限制 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirrors/el/EldenRing…...

告别浪费!SolidWorks企业级共享方案,实现降本增效全攻略
还在为 SolidWorks 高昂的硬件投入和混乱的图纸管理头疼?告别“一人一机”的浪费模式,企业级共享方案才是降本增效的正解。这套攻略基于“1 台高性能服务器 云飞云共享云桌面”架构,帮你把硬件成本砍掉 60%,把软件利用率翻倍。一…...

2027考研全套资料免费分享
备战27考研最全备考资料整理完毕,一路走来深知备考搜集资料耗费大量时间,浪费不少精力。特意整理2027考研全科完整版资源,全部打包汇总,零基础考生直接拿来就能使用,省去四处搜集资料的烦恼。资料内含:&…...

从游戏引擎到仿真平台:手把手教你用AirSim+UE4搭建你的第一个无人机/自动驾驶仿真环境
从游戏引擎到仿真平台:构建AirSimUE4无人机与自动驾驶仿真环境实战指南当游戏引擎遇上机器人算法测试,会碰撞出怎样的火花?微软开源的AirSim项目将虚幻引擎(Unreal Engine)从游戏开发领域引入到自动驾驶和无人机研究的…...

从开题到定稿零焦虑:okbiye AI 论文写作,帮你把毕业季的 “大山” 变成坦途
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 毕业季的深夜,宿舍台灯下的屏幕亮着刺眼的光,文档里的字数停留在三位数,而 deadline 正一天天逼近。你是…...

保姆级教程:在Ubuntu上配置Frida环境,搞定Android App的IO重定向与签名绕过
在Ubuntu上构建Android逆向工程环境:Frida实战与IO重定向技术解析 对于习惯Linux环境的安全研究人员而言,Windows-centric的逆向工具链往往带来诸多不便。本文将系统性地介绍如何在Ubuntu上搭建完整的Android逆向环境,并深入探讨如何利用Frid…...