《智能网联汽车自动驾驶功能测试规程》
一、 编制背景
2018 年4 月12 日,工业和信息化部、公安部、交通运输部联合发布《智能网联汽车道路测试管理规范(试行)》(以下简称《管理规范》),对智能网联汽车道路测试申请、审核、管理以及测试主体、测试驾驶人和测试车辆要求等进行规范。
按照《管理规范》,测试车辆应在封闭道路、场地等特定区域进行充分的实车测试,由国家或省市认可的从事汽车相关业务的第三方检测机构对其自动驾驶功能进行检测验证、确认其具备进行道路测试的条件,方可申请进行自动驾驶道路测试;《管理规范》还提出了14 项智能网联汽车自动驾驶功能检测项目。
目前,国内已有十余个省市级地方政府依据《管理规范》制定实施了相关实施细则,部分地方开始发放测试牌照。但从整体来看,各地方对自动驾驶功能测试项目的场景设置、测试规程及功能要求等繁简、难易程度差别较大,给测试主体多地开展自动驾驶测试造成了一定障碍,迫切需要对应《管理规范》规定的自动驾驶功能制定出台统一的测试场景、测试规程及通过条件,用于指导第三方检测机构进行自动驾驶功能检测验证。
二、 编制过程
为配合和支撑《管理规范》所列自动驾驶功能检测项目的规范开展,中国智能网联汽车产业创新联盟、全国汽车标准化技术委员会智能网联汽车分技术委员会(以下简称“汽标委智能网联汽车分标委”)受工业和信息化部装备司委托,牵头组织中国汽车技术研究中心有限公司、中国汽车工程研究院有限公司、中国汽车工程学会、中国汽车工业协会、中国信息通信研究院等相关组织、机构和骨干企业成立《智能网联汽车自动驾驶功能测试规程》(以下简称《测试规程》)编制组,开展《测试规程》的研究与编写工作。
2018 年3 月15 日,《测试规程》编制组在北京成立并举行了第一次讨论会,就《测试规程》编制的原则、整体思路等内容等进行初步探讨和研究。
2018 年4 月13 日,《测试规程》编制组在天津召开第二次讨论会,
研究确定了总体思路、重点内容、工作计划及分工。
2018 年4 月19 日至20 日,《测试规程》编制组在天津召开第三次讨论会,对各单位提交的《测试规程》建议方案进行汇总,就各检测项目对应测试场景达成共识,协商形成了《测试规程》草案。
2018 年4 月25 日,《测试规程》编制组在天津召开扩大会议,邀请汽车、通讯、电子等相关行业机构和骨干企业与会,介绍汇报《测试规程》草案,听取各方对各检测项目对应测试场景、测试条件和试验参数的意见和建议。
2018 年4 月27 日至28 日,《测试规程》编制组在天津召开第四次讨论会,根据扩大会议各方所提意见,对《测试规程》做进一步修改、完善。
2018 年5-7 月,中国智能网联汽车产业创新联盟、汽标委智能网联汽车分标委秘书处就《测试规程》主要内容与公安、交通等相关行业研究进行了积极的沟通和交流,根据其意见建议进行修改完善,形成最终方案。
三、 主要思路与基本原则
作为支撑《管理规范》有关自动驾驶功能检测、保障自动驾驶测试安全的配套文件,《测试规程》坚持以保障自动驾驶道路测试安全为底线,兼顾不同技术路线、车辆类型,确保测试场景的典型性、代表性和操作规程的可行性、合理性,提出了各检测项目对应测试场景、测试规程及通过条件。
1. 以保障自动驾驶测试的安全为底线
坚持安全底线原则,对自动驾驶功能各检测项目可能涉及的基本场景做出规定,降低自动驾驶公共道路测试过程的风险,保障测试车辆及其它道路使用者的安全。
2. 兼顾智能化和网联化两条技术路线
坚持功能和性能导向原则,以整车自动驾驶功能评价为核心,提出适用于智能化和网联化的测试规程;要求测试主体事先声明所采用的技术路线,根据其技术路线开展测试验证。对采用网联技术实现或辅助实现自动驾驶功能的测试车辆,需额外进行网联通讯测试项目验证。
3. 考虑乘用车和商用车测试场景差别
综合考虑乘用车和商用车辆产品属性、用途、技术特征和测试场景的差别,根据不同车型自动驾驶功能应用场合及需求不同,分别设置合适的场景进行自动驾驶功能测试。
4. 注重测试场景选取典型性和代表性
各自动驾驶功能测试场景选择最基本道路类型、最常见交通标识、最普遍车辆行驶状态等;暂不考虑特殊路段、特殊天气等因素。在具有较高相似度的场景中,选取最具代表性、实际道路中出现频率最高的场景。
5. 注重测试规程操作可行性和合理性
测试场景可搭建、易复现、适用于国内主要测试场;测试方法可操作,测试过程可控,测试结果可测量,测试过程可复现。
四、 主要内容
(一) 适用范围
本规程适用于申请进行自动驾驶功能道路测试的智能网联汽车。
(二) 检测项目
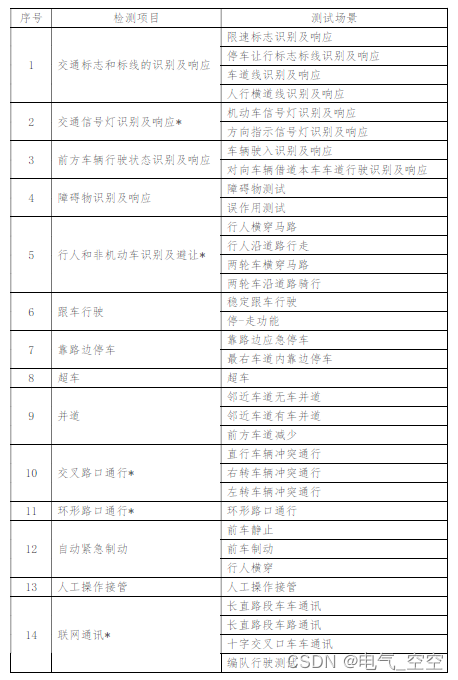
对应《管理规范》附件1 中所列智能网联汽车自动驾驶功能检测项目,包括必测项目9 项和选测项目5 项,依据各项目特点,并遵循编制主要思路与基本原则,拟定必测场景20 个,选测场景14 个(标注*)。其中,对选测项目及场景(标注*),如企业声明其车具有相应功能或测试路段涉及相应场景的,也应进行相关项目的检测。
表1 智能网联汽车自动驾驶功能检测项目及测试场景
(三) 测试规程
1. 交通标志和标线的识别及响应
本检测项目旨在测试自动驾驶系统对交通标志和标线的识别和响应,评价测试车辆遵守交通法规的能力。
本检测项目应进行限速标志、停车让行标志标线、车道线和人行横道线四类标志标线场景的测试。
2. 交通信号灯识别及响应*
本检测项目旨在测试自动驾驶系统对交通信号灯的识别和响应,评价测试车辆遵守交通信号灯指示的能力。
本检测项目应进行机动车信号灯、方向指示信号灯(若测试路段包含)场景测试。
本检测项目选测,如企业声明其车辆具有相应功能或测试路段涉及该
场景的,应进行检测。
3. 前方车辆行驶状态识别及响应
本检测项目旨在测试自动驾驶系统对前方车辆行驶状态的识别和响应,评价测试车辆对前方车辆的感知、行为预测和响应能力。
本检测项目应进行车辆驶入和对向车辆借道行驶两项场景测试。
4. 障碍物识别及响应
本检测项目旨在测试自动驾驶系统对障碍物的识别和响应,评价测试车辆对前方障碍物的感知、决策及执行能力。
本检测项目应进行障碍物和误作用两项场景测试。
5. 行人和非机动车识别及避让*
本检测项目旨在测试自动驾驶系统对行人和非机动车的识别和响应,评价测试车辆对前方行人和非机动车的感知、行为预测和响应能力。
本检测项目应进行行人横穿马路、行人沿道路行走、两轮车横穿马路和两轮车沿道路骑行四项场景测试。
本检测项目选测,如企业声明其车辆具有相应功能或测试路段涉及该
场景的,应进行检测。
6. 稳定跟车行驶
本测试项目旨在测试自动驾驶系统跟随前车行驶的能力。
本检测项目应进行稳定跟车行驶和停-走功能测试;如果测试车辆具备编队行驶功能,需进行编队行驶测试。
7. 靠路边停车
本检测项目旨在测试自动驾驶系统在遇到驾驶风险时靠边停车的功
能,评价测试车辆最小风险状态实现的能力。
本检测项目应进行靠路边应急停车和最右车道内靠边停车两项场景
测试。项目场景不考虑跨车道行驶,车辆仅需要完成一次并道操作。
8. 超车
本检测项目旨在测试自动驾驶系统的超车功能,评价测试车辆的感知、决策和执行能力。
本检测项目应包含并入相邻车道、超越目标车辆和安全返回原车道三
项动作。
9. 并道
本检测项目旨在测试自动驾驶系统换道行驶的能力。
本检测项目应进行邻近车道无车并道、邻近车道有车并道和前方车道减少三项场景测试。
10. 交叉路口通行*
本检测项目旨在测试自动驾驶系统的交叉路口通行,评价测试车辆的路径规划和导航能力。
本检测项目应进行直行车辆冲突通行、右转车辆冲突通行、左转车辆冲突通行三项场景测试。
本检测项目选测,如企业声明其车辆具有相应功能或测试路段涉及该场景的,应进行检测。
11. 环形路口通行*
本检测项目旨在测试自动驾驶系统进出环形路口的通行行为,评价测试车辆路径规划和执行的能力。
本检测项目应进行环形路口通行场景测试。
本检测项目选测,如企业声明其车辆具有相应功能或测试路段涉及该
场景的,应进行检测。
12. 自动紧急制动
本检测项目旨在测试在发生碰撞危险时测试车辆自动紧急制动的性能,评价其紧急避撞能力。
本检测项目应进行前车静止、前车制动和行人横穿三项场景测试。
本检测项目为基本安全功能,不属于自动驾驶范畴。
13. 人工操作接管
本检测项目旨在测试自动驾驶系统的人工操作接管功能,评价测试车辆自动驾驶和人工操作两种模式转换的人机共驾能力。本检测项目应进行接管请求提醒功能和接管功能测试。
14. 网联通讯*
本检测项目旨在测试自动驾驶系统的联网通讯,评价测试车辆和外界信息交换的能力。本检测项目应进行长直路段车车、长直路段车路、十字交叉口车车通讯、编队行驶四个场景的测试。本检测项目选测,如企业声明其车辆具有相应功能或测试路段涉及该场景的,应进行检测;其中,编队行驶场景仅适用于申请进行编队测试的车辆。
(四) 附录说明
附录A 测试车辆参数表此表格内容涵盖车辆基本信息、车辆技术路线、任务输入方式及车辆传感器信息;由测试主体根据测试车辆情况填写,可作为测试机构制定测试方案的重要依据。附录B 测试场景组合测试推荐方案为提高场地利用效率,缩短测试周期,按照单项评价、组合试验原则,在附录B 中提出了测试场景组合测试推荐方案;测试机构可根据推荐方案,合并进行多个测试场景。
五、 其它
智能网联汽车具有更新迭代速度快的特点,《测试规程》应根据各地实施情况和技术发展动态更新与完善,以支撑智能网联汽车道路测试管理的安全开展。
相关文章:
《智能网联汽车自动驾驶功能测试规程》
一、 编制背景 2018 年4 月12 日,工业和信息化部、公安部、交通运输部联合发布《智能网联汽车道路测试管理规范(试行)》(以下简称《管理规范》),对智能网联汽车道路测试申请、审核、管理以及测试主体、测试驾驶人和测试车辆要求等…...
NVIDIA CUDA Win10安装步骤
前言 windows10 版本安装 CUDA ,首先需要下载两个安装包 CUDA toolkit(toolkit就是指工具包)cuDNN 1. 安装前准备 在安装CUDA之前,需要完成以下准备工作: 确认你的显卡已经正确安装,在设备管理器中可以看…...
Elasticsearch、Kibana以及Java操作ES 的快速使用
docker 安装elastic search 、 kibana(可视化管理elastic search) docker pull elasticsearch:7.12.1 docker pull kibana:7.12.1创建docker自定义网络 docker自定义网络可以使得容器之间使用容器名网络互连,默认的网络不会有这功能。 一定…...

逐鹿人形机器人,百度、腾讯、小米卷起来
长期不温不火的人形机器人产业迎来新风口,技术显著提升、新品层出不穷、资本投资态度也逐渐好转。 8月18日,2023世界机器人大会博览会正式开放,全面展示了机器人行业的新技术、新产品和新应用。据悉,此次展会展览总面积达4.5万平…...

AndroidStudio推荐下载和配置
1、推荐下载链接 Download Android Studio & App Tools - Android Developers 2、gradle配置案例 // Top-level build file where you can add configuration options common to all sub-projects/modules.buildscript {repositories {maven { url https://maven.aliyun.…...

mysql异常占用资源排查
通过执行日志与连接信息排查 查看是否开启日志记录 mysql> show global variables like %general%; --------------------------------- | Variable_name | Value | --------------------------------- | general_log | OFF | | general_log_file…...
)
requests 库:发送 form-data 格式的 http 请求 (python)
安装 requests-toolbelt !pip install requests-toolbeltdemo from requests_toolbelt import MultipartEncoder import requestsm MultipartEncoder(fields{query: """第一,向量化匹配是有能力上限的。搜索引擎实现语义搜索已经是好几年的事情了…...
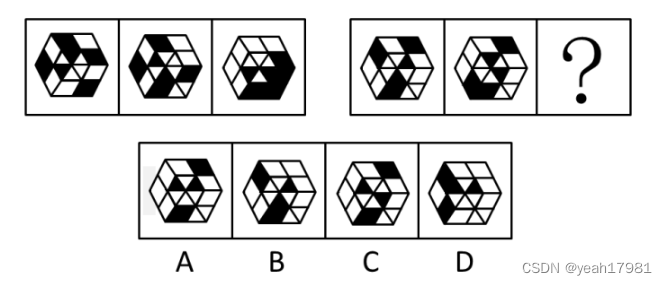
行测图形推理规律(一)元素组成
题库:粉笔网题库 (fenbi.com) 不知道和测评的行测题库是不是一样的,但是总结的规律应该是一样的。 规律并不唯一,题库的答案也只是参考答案,切勿当杠精,你觉得你的规律更合适就别管。本人所归纳的规律仅代表本人想法…...
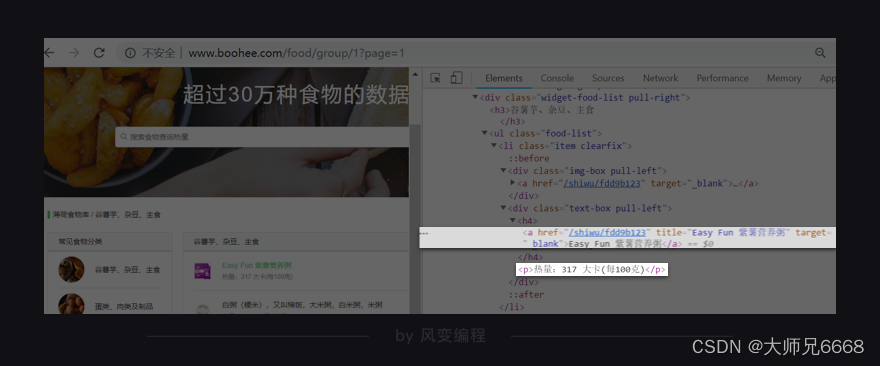
【python爬虫】13.吃什么不会胖(爬虫实操练习)
文章目录 前言项目实操明确目标分析过程代码实现 前言 吃什么不会胖——这是我前段时间在健身时比较关注的话题。 相信很多人,哪怕不健身,也会和我一样注重饮食的健康,在乎自己每天摄入的食物热量。 不过,生活中应该很少有人会…...

深入理解联邦学习——联邦学习与现有理论的区别与联系
分类目录:《深入理解联邦学习》总目录 作为一种全新的技术,联邦学习在借鉴一些成熟技术的同时也具备了一定的独创性。下面我们就从多个角度来阐释联邦学习和其他相关概念之间的关系。 联邦学习与差分隐私理论的区别 联邦学习的特点使其可以被用来保护用…...
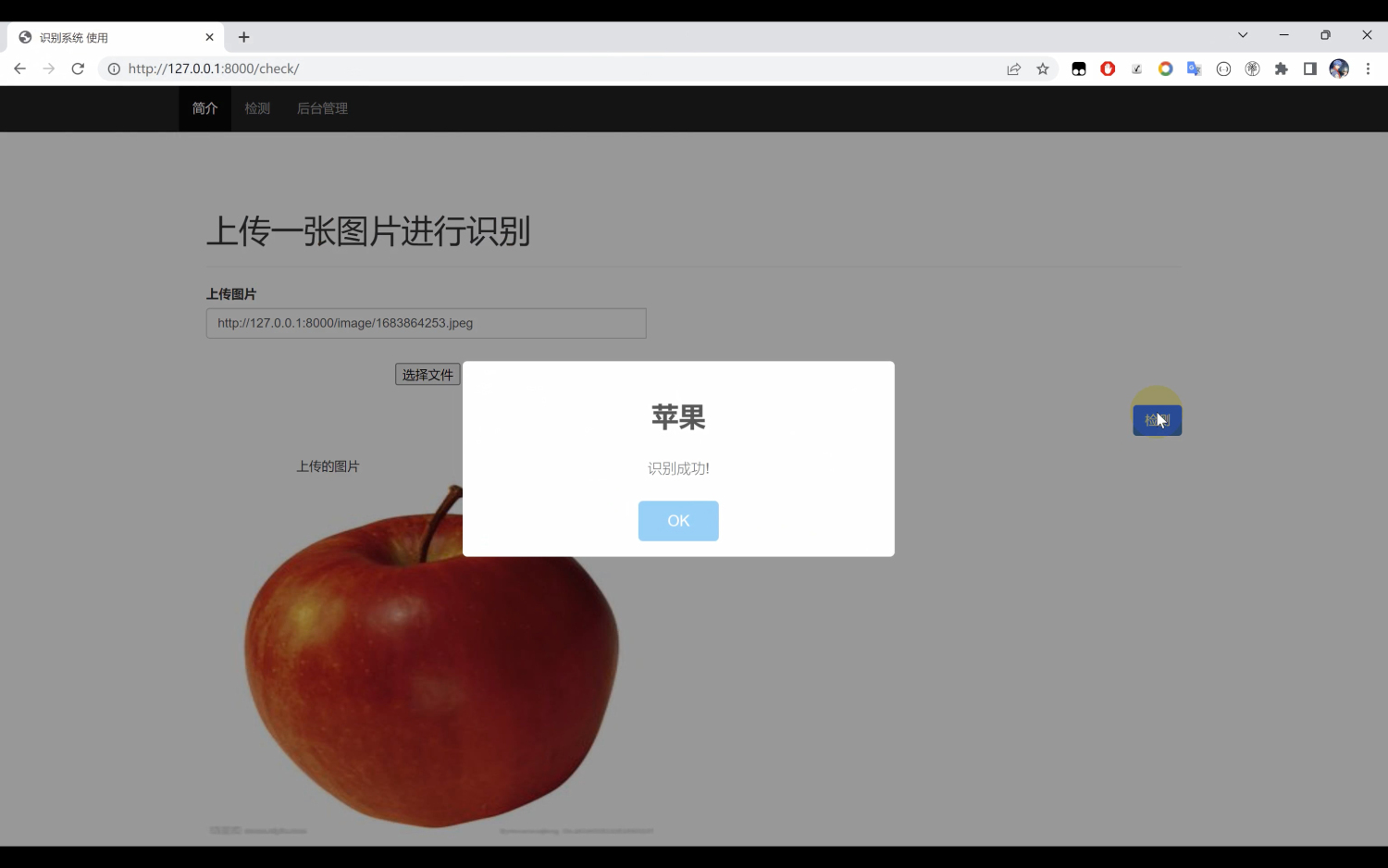
基于Python+DenseNet121算法模型实现一个图像分类识别系统案例
目录 介绍在TensorFlow中的应用实战案例最后 一、介绍 DenseNet(Densely Connected Convolutional Networks)是一种卷积神经网络(CNN)架构,2017年由Gao Huang等人提出。该网络的核心思想是密集连接,即每…...

旋转图片两种方法
这两种方法在旋转图像时,可能会产生一些不同的效果: rotate_image_new()旋转后的图像完全包含旋转前的内容,并且填充边界尽可能小 rotate_image() 保持原始图像的大小,并根据填充选项决定是否填充边界为白色。如果 if_fill_whit…...
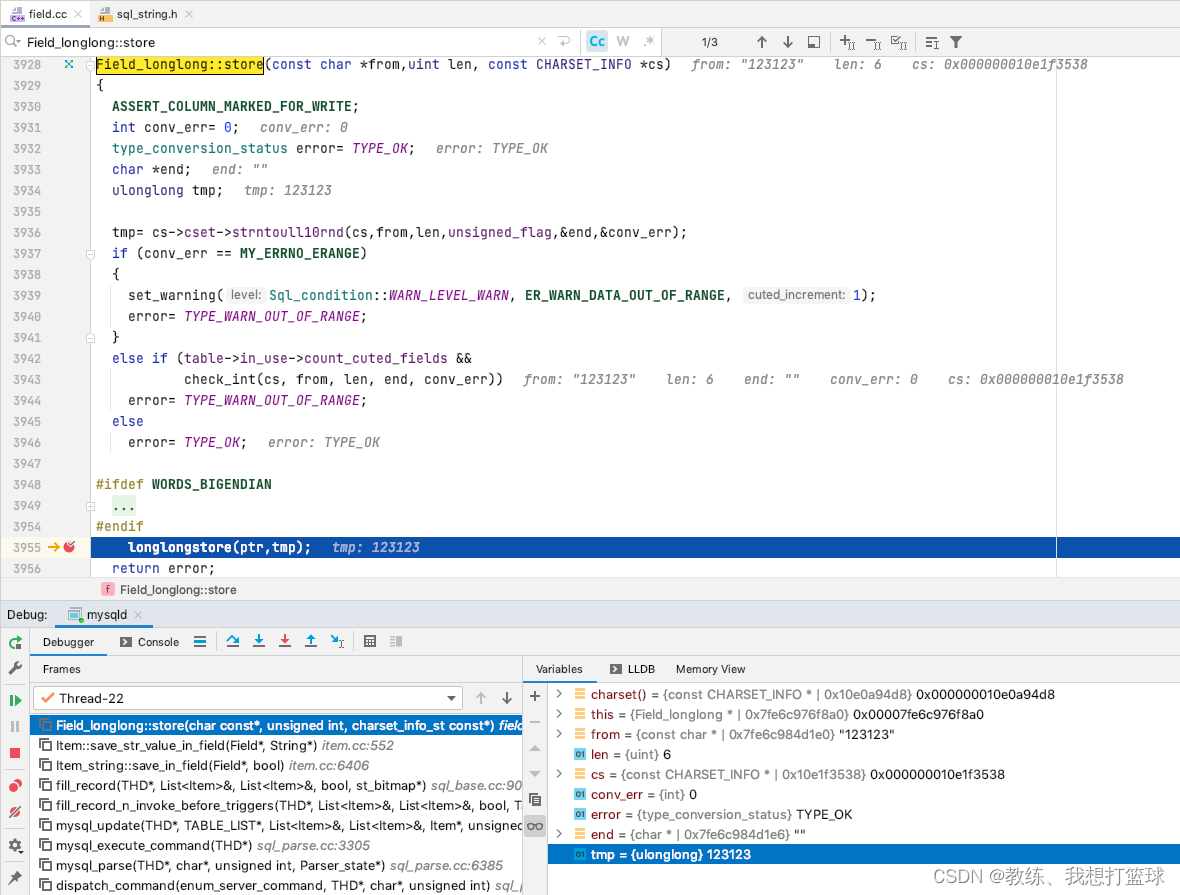
10 mysql tiny/small/medium/big int 的数据存储
前言 这里主要是 由于之前的一个 datetime 存储的时间 导致的问题的衍生出来的探究 探究的主要内容为 int 类类型的存储, 浮点类类型的存储, char 类类型的存储, blob 类类型的存储, enum/json/set/bit 类类型的存储 本文主要 的相关内容是 int 类类型的相关数据的存储 …...

UI自动化测试之Jenkins配置
团队下半年的目标之一是实现自动化测试,这里要吐槽一下,之前开发的测试平台了,最初的目的是用来做接口自动化测试和性能测试,但由于各种原因,接口自动化测试那部分功能整个废弃掉了,其中和易用性有很大关系…...

电视盒子什么品牌好?数码博主盘点目前性能最好的电视盒子
电视盒子是非常重要的,老人小孩基本每天都会看电视,而电视盒子作为电视盒子的最佳拍档销量十分火爆,我自己每个月都会测评几次电视盒子,今天给大家详细解读一下电视盒子什么品牌好,看看目前性能最好的电视盒子是哪些&a…...

对于枚举类型的输出
对于枚举类型的输出 对于枚举类型的输出,您可以使用以下方法:1. 将枚举值转换为整数进行输出:cppODU_TYPE type ODU_TYPE_331;int value static_cast<int>(type);std::cout << "ODU_TYPE: " << value <<…...
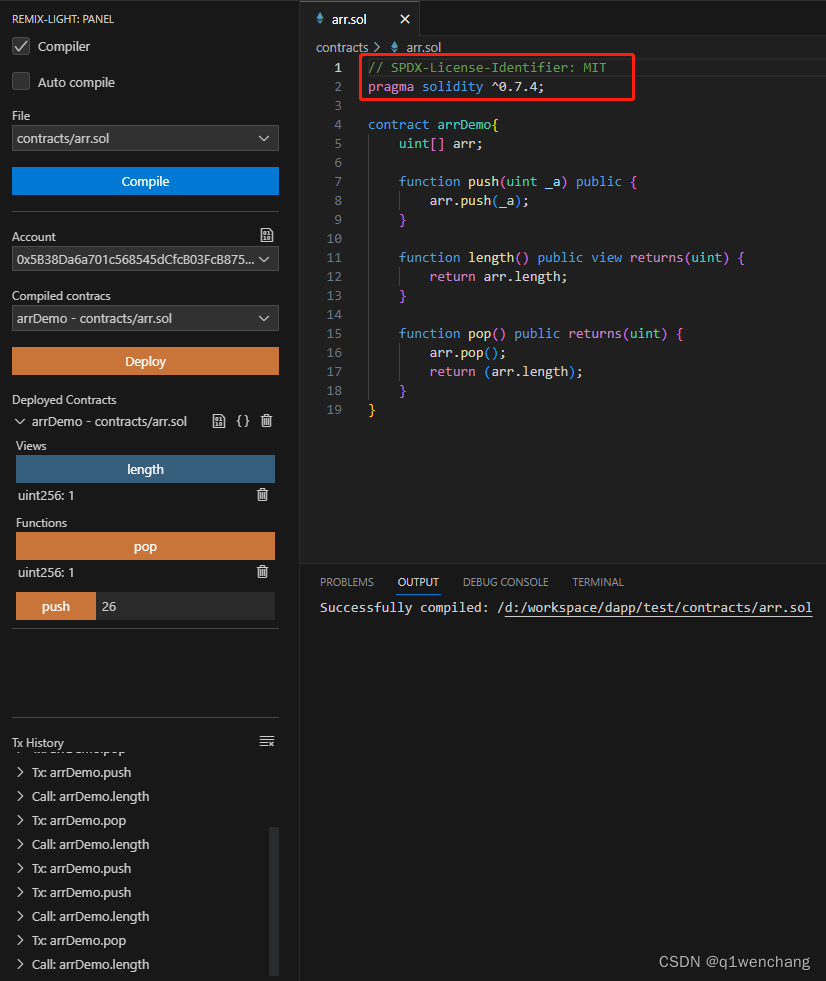
solidity开发环境配置,vscode搭配remix
#学习笔记 初学solidity,使用remix非常方便,因为需要的环境都配置好了,打开网站就可以使用。 不过在编写代码方面,使用vscode更方便,而vscode本身并不能像remix那样部署合约,它还需要安装插件。 点击红色箭…...

chatGPT生成代码--go组合算法
提问:用golang写一个组合算法函数zuhe(x,n),x为组合所需的字符,n 为组合后的字符串长度,例如 x"ab", n2 结果返回 aa,ab,bb,ba 结果:下面是一个用Go编写的生成长度为n的字符串组合的函数 zuhe,其…...
推荐6款普通人搞副业做自媒体AI工具
hi,同学们,我是赤辰,本期是赤辰第5篇AI工具类教程,文章底部准备了粉丝福利,看完可以领取!身边越来越多的小伙伴靠自媒体实现财富自由了!因此,推荐大家在工作之余或空闲时间从事自媒体…...

vs中git提交合并分支的步骤记录
vs打开终端 PS D:\project\et_lower4_driver> git pull Already up to date. PS D:\project\et_lower4_driver> git branch * kiyun_usb7851 master PS D:\project\et_lower4_driver> git checkout master Switched to branch master Your branch is up to date wit…...

【技术解析】目标导向语义探索:如何让机器人学会“按图索骥”
1. 当机器人学会"按图索骥" 想象一下,你被蒙着眼睛带进一个陌生的家具商场,任务是找到一张红色沙发。正常人会先摸到墙壁确定方位,听到脚步声判断通道方向,闻到咖啡香推测休息区位置——这种多模态信息整合能力&#x…...

JavaQuestPlayer终极指南:5大核心功能让你的QSP游戏开发与运行变得简单高效
JavaQuestPlayer终极指南:5大核心功能让你的QSP游戏开发与运行变得简单高效 【免费下载链接】JavaQuestPlayer 项目地址: https://gitcode.com/gh_mirrors/ja/JavaQuestPlayer 还在为QSP游戏的跨平台兼容性而烦恼吗?还在为游戏开发调试效率低下而…...
了!用Celery的Canvas原语(Group/Chain/Chord)构建复杂异步工作流)
别再只会用delay()了!用Celery的Canvas原语(Group/Chain/Chord)构建复杂异步工作流
别再只会用delay()了!用Celery的Canvas原语构建复杂异步工作流 在异步任务处理领域,Celery早已成为Python生态中的标配工具。但令人惊讶的是,大多数开发者仅仅停留在task.delay()的基础用法上,就像只学会了加减法却从未接触过微积…...

CARLA与Autoware融合实践:从自定义地图构建到闭环仿真测试
1. 自定义高精地图的构建与格式转换 在自动驾驶仿真开发中,高精地图是车辆感知和决策的基础。CARLA仿真环境提供了灵活的地图编辑工具,但要将自建地图与Autoware无缝对接,需要特别注意数据格式的兼容性。我曾在实际项目中遇到过多次地图导入…...

贝壳季报图解:营收189亿 经调整净利16亿同比增15.7%
雷递网 雷建平 5月19日贝壳(纽交所代码:BEKE;香港联交所代号:2423)今日公布其截至2026年3月31日止第一季度未经审计财务业绩。财报显示,贝壳2026年第一季度贝壳实现净收入189亿元,净利润12.55亿…...

为什么天下工厂能直接给到工厂老板 / 厂长手机号
做工业品销售的人都有过这种经历:在网上查到了一家目标工厂,拨过去,接电话的是前台。“您好,请问有什么事?” “我想找一下您们老板。” “老板不在,您要不要留个电话?” 电话留了,没…...

跨境物流监控进入“秒级预警”时代:实测实在Agent风险预警能力深度测评详解
摘要: 步入2026年,全球贸易数字化转型已从“信息化”跨越至“智能体化”阶段。跨境物流监控作为支撑全球供应链的核心枢纽,正面临红海危机常态化、信创国产化替代加速以及数据安全监管趋严的多重挑战。传统的人工监控与初级RPA方案在应对多变…...

LabVIEW字符串处理保姆级教程:从长度计算到日期格式化,13个实例带你玩转
LabVIEW字符串处理实战指南:从基础操作到高级应用 在工业自动化、测试测量和仪器控制领域,LabVIEW作为图形化编程的标杆工具,其字符串处理能力直接影响着数据解析、通信协议实现等核心功能。本文将通过13个典型场景,系统讲解如何高…...

Android Studio中文界面汉化教程:3步实现母语开发环境
Android Studio中文界面汉化教程:3步实现母语开发环境 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack 还在为Android …...

地平线6地图有哪些 地平线6可以在手机上玩吗
很多玩家都在关注地平线6地图的细节,想知道这款即将上线的竞速大作究竟有哪些可探索的场景,而地平线6地图的丰富度也直接决定了游戏的可玩性。不少玩家习惯用手机碎片时间想体验游戏,却受设备限制无法解锁地平线6地图的全部风光,这…...