数学建模--粒子群算法(PSO)的Python实现
目录
1.开篇提示
2.算法流程简介
3.算法核心代码
4.算法效果展示
1.开篇提示
"""
开篇提示:
这篇文章是一篇学习文章,思路和参考来自:https://blog.csdn.net/weixin_42051846/article/details/128673427?utm_medium=distribute.pc_relevant.none-task-blog-2~default~baidujs_baidulandingword~default-4-128673427-blog-127750401.235^v38^pc_relevant_anti_t3&spm=1001.2101.3001.4242.3&utm_relevant_index=7
我基于自己的研究习惯对于该博主的文章进行了部分的学习和理解,并且对于代码进行了部分的修改,但总体还是参考他的思路和代码,在这里表示非常的感谢!
如果你想更了解PSO算法的内核,请您移步其博客,该博客给出了非常细致的分析。
代码修改处如下所示:
1.添加图片中的中文文字(matplotlib汉化问题)
2.fit_fun()书写简化
3.绘图更加清晰精炼
4.修改迭代函数部分中的计算量
"""2.算法流程简介
"""
粒子群算法(PSO):是一种模拟鸟类觅食的智能优化算法
该算法的求解思路就是将待求解问题的每一个候选解视作鸟群中的每一个个体的具体位置信息,
每个候选解对应的最优适应度值作为每个个体在该位置处所能搜索到的食物的量,
通过个体间位置信息的相互交流来发现目标范围内的最优适应度值对应的最优候选解。
###重要概念
使用粒子群算法的时候我们需要及时去更新两个主要算式,也是PSO中最重要的两个公式
1.粒子的位置信息需要进行不断更新,对于每一个粒子的位置信息的计算更新公式:x(t+1)=x(t)+V(t+1)
2.对于粒子的下一次的移动更新距离,就涉及到了迭代的移动方向和距离,其更新公式如下所示:V(t+1)=wV(t)+c1r1(pbest(t)-x(t))+c2r2(gbest(t)-x(t))
有了以上的公式,我们处理PSO问题就变得比较简单了!
"""
"""
具体的算法流程如下:
1.基础参数的设置
2.初始化loc,v和种群适应度
3.标记最优个体数据
4.进行种群迭代运算
5.绘制可视化图片查看变化趋势
"""本题中需要处理的问题是:(设置搜索空间维度为20,范围为[-10,10])

3.算法核心代码
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.pyplot as plt
#matplotlib支持中文
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号
def fit_fun(x):y1=0for i in range(len(x)-1):y1=y1+100*((x[i+1]-x[i]*x[i])*(x[i+1]-x[i]*x[i]))+(x[i]-1)*(x[i]-1)y=abs(y1)return y
#1.基础参数的设置
range1=[-10,10]#取值范围
pso_number=300#进化种群的数量
iterators = 2000 #迭代次数最好大于500次以上,不然效果不明显
w=0.8 #惯性因子
#两个加速系数
c1=2
c2=2
#种群个体的位置
loc=np.zeros((pso_number,20))
#种群个体的移动速度
v= np.zeros((pso_number, 20))
#种群的个体适应度值
fitness=np.zeros(pso_number)#2.初始化loc,v和种群适应度
for j in range(pso_number):loc[j] = np.random.uniform(low=-10, high=10,size=(1, 20))v[j] = np.zeros((1,20))fitness[j] = fit_fun(loc[j])
#3.标记最优个体数据
allpg,bestpg=loc[fitness.argmin()].copy(),fitness.min()#allpg,bestpg分别表示种群历史最优个体和适应度值
poppn,bestpn=loc.copy(),fitness.copy()#poppn,bestpn分别存储个体历史最优位置和适应度值
bestfitness=np.zeros(iterators)#bestfitness用于存储每次迭代时的种群历史最优适应度值
#4.进行种群迭代运算
#开始迭代
for i in range(iterators):print("此时为第",i+1,"次迭代:")for m in range(pso_number):r1 = np.random.rand()r2 = np.random.rand()#计算移动速度同时更新位置信息v[m]=w*v[m]+c1*r1*(poppn[m]-loc[m])+c2*r2*(allpg-loc[m])loc[m]=loc[m]+v[m]#确保更新后的位置在取值范围内loc[loc<range1[0]]=range1[0]loc[loc>range1[1]]=range1[1]#计算适应度值fitness[m] = fit_fun(loc[m])#更新个体历史最优适应度值if fitness[m]<bestpn[m]:bestpn[m]=fitness[m]poppn[m]=loc[m].copy()#更新种群历史最优适应if bestpn.min()<bestpg:bestpg=bestpn.min()allpg=poppn[bestpn.argmin()].copy()bestfitness[i]=bestpgprint("当前最佳的群体适应值为:",bestfitness[i])#5.绘制可视化图片查看变化趋势
fig=plt.figure()
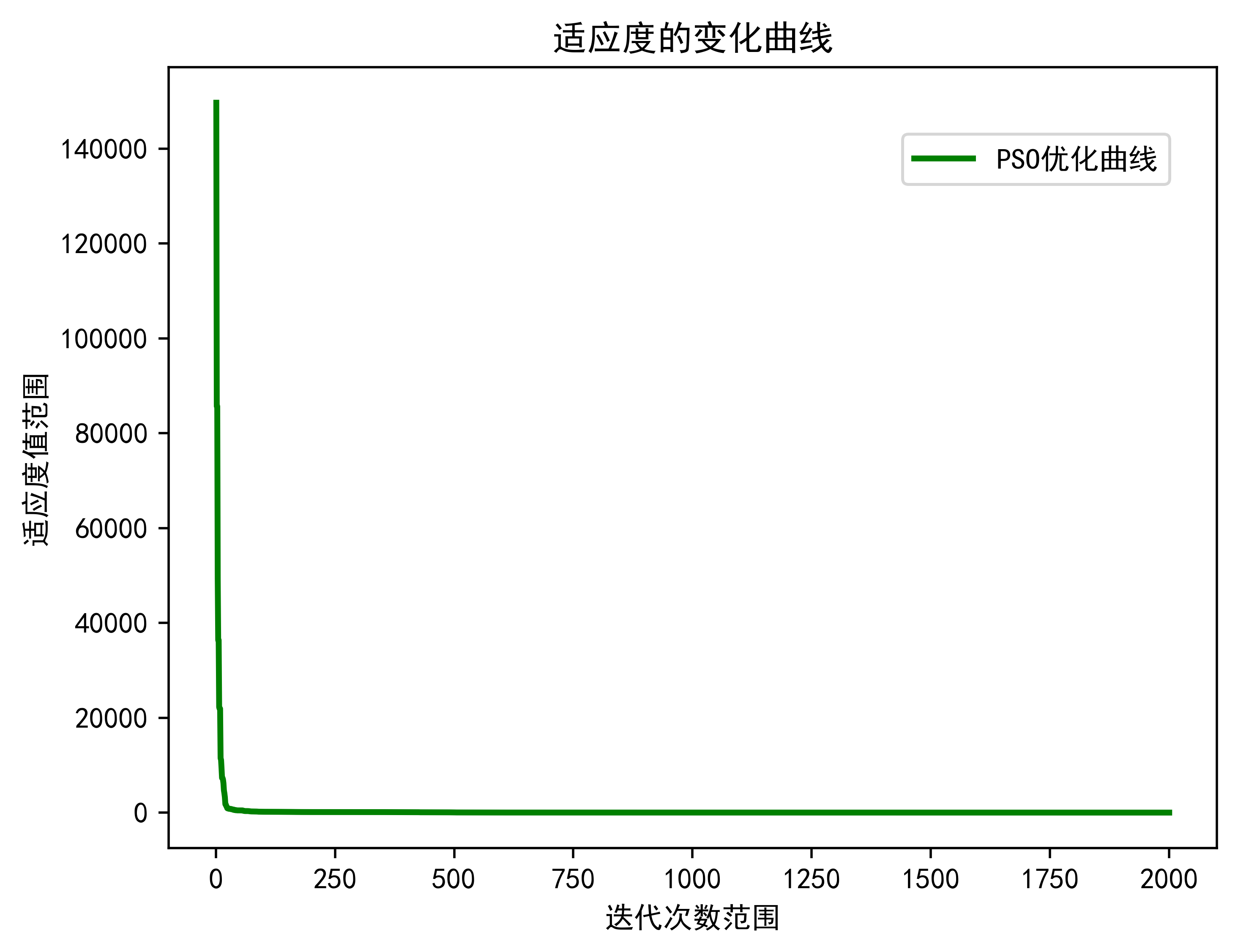
plt.title('适应度的变化曲线')
x=range(1,iterators+1,1)
plt.plot(x,bestfitness,color="green",label="PSO优化曲线",linewidth=2.0, linestyle="-")
plt.xlabel("迭代次数范围")
plt.ylabel("适应度值范围")
plt.legend(loc=3, borderaxespad=0., bbox_to_anchor=(0.7, 0.85))
plt.savefig('C:/Users/Zeng Zhong Yan/Desktop/粒子群算法.png', dpi=500, bbox_inches='tight')
plt.show()4.算法效果展示
相关文章:
数学建模--粒子群算法(PSO)的Python实现
目录 1.开篇提示 2.算法流程简介 3.算法核心代码 4.算法效果展示 1.开篇提示 """ 开篇提示: 这篇文章是一篇学习文章,思路和参考来自:https://blog.csdn.net/weixin_42051846/article/details/128673427?utm_mediumdistribute.pc_relevant.none-task-blog-…...
【C++】STL-函数对象-内建函数对象
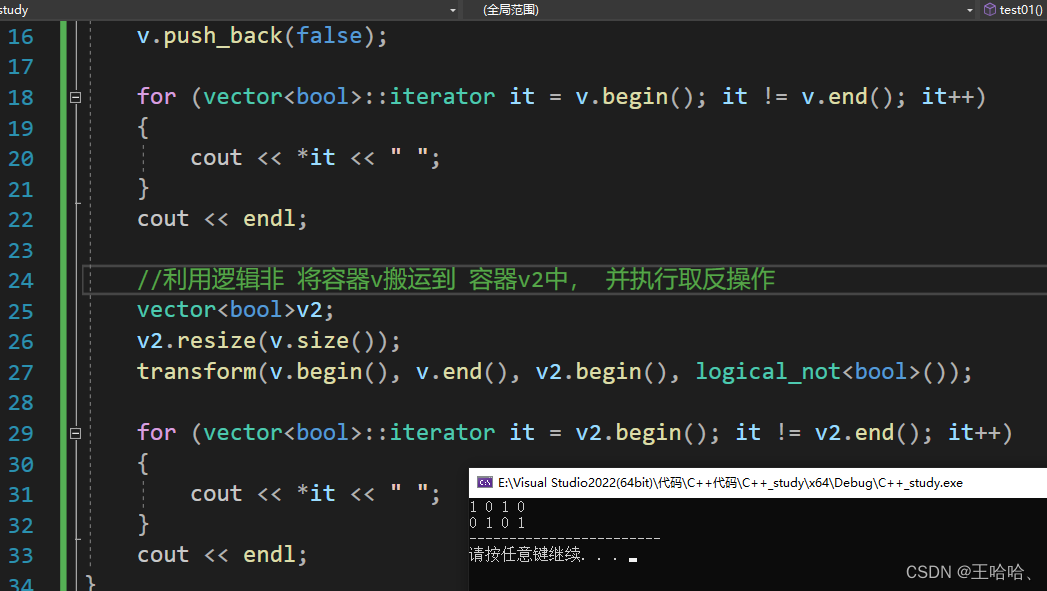
0.前言 1.算术仿函数 #include <iostream> using namespace std;// STL-内建函数对象-算术仿函数 #include<functional> // 内建函数对象头文件//以下举例两个仿函数 -- negate and plus// negate 一元仿函数 取反仿函数 void test01() {negate<int>n;cout …...

Redis 教程 - Redis 基本操作
Redis 教程 - Redis 基本操作 Redis(Remote Dictionary Server)是一个开源的内存数据库,它提供了键值对存储和多种数据结构的支持,被广泛应用于缓存、消息队列、计数器等场景。本教程将介绍 Redis 的基本操作,包括连接…...
FreeRTOS中断与任务之间同步(Error:..\..\FreeRTOS\portable\RVDS\ARM_CM4F\port.c,422 )
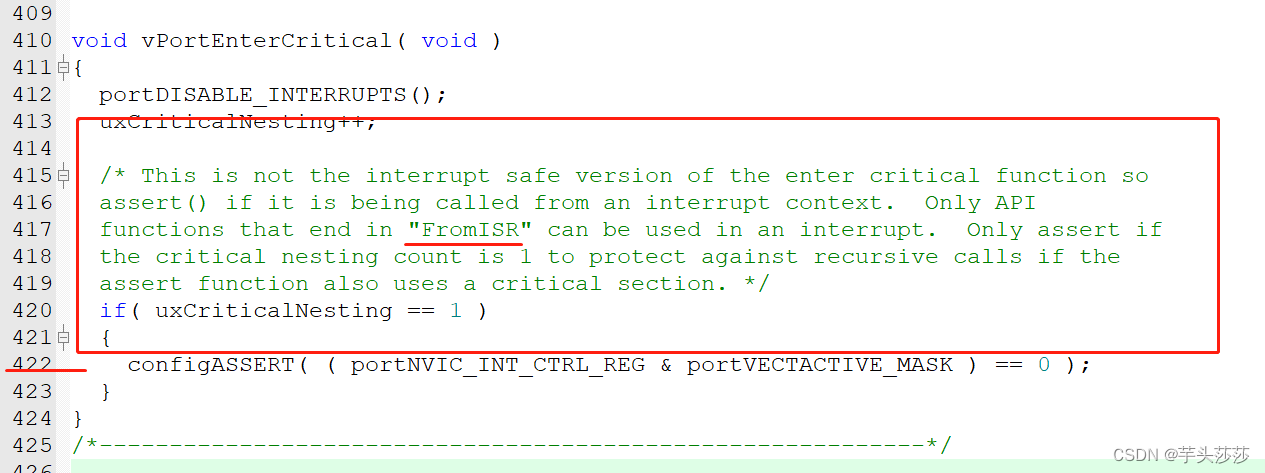
前言: FreeRTOS中,中断需要注意几点: 何时使用中断;中断服务函数(ISR)要处理的数据量有多大,通常我们希望中断的切换越快越好,也就是说,ISR尽量采用耗时较少的处理方式…...

WebRTC清晰度和流畅度
WebRTC清晰度和流畅度 flyfish WebRTC提供了4种模式DISABLED,MAINTAIN_FRAMERATE,MAINTAIN_RESOLUTION,BALANCED // Based on the spec in // https://w3c.github.io/webrtc-pc/#idl-def-rtcdegradationpreference. // These options are …...

华为数通方向HCIP-DataCom H12-821题库(单选题:181-200)
第181题 某管理员需要创建AS Path过滤器(ip as-path-iter),允许AS_Path中包含65001的路由通过,那么以下哪一项配置是正确的? A、ip as-path-filter 1 permit 65001 B、ip as-path-filter 1 permit "65001 C、ip as-path-filter 1 permit *6500…...

海康威视二次开发适配安卓电视盒子
收到一个需求,需要在安卓电视盒子上适配海康威视摄像头视频: 1.类似电视家app界面,左边滑动菜单显示通道列表、设置按钮,遥控器呼出菜单。 2.遥控器操作:切换视频通道、云台上下左右控制、缩放等。 3.服务器域名、用…...

NIO原理浅析(二)
IO分类 阻塞和非阻塞 阻塞IO:用户空间引发内核空间的系统调用,需要内核IO操作彻底完成之后,返回值才会返回到用户空间,执行用户的操作。阻塞指的用户空间程序的执行状态,用户空间程序需要等到IO操作彻底执行完毕。j…...
leetcode每日一练-第53题-最大子数组和
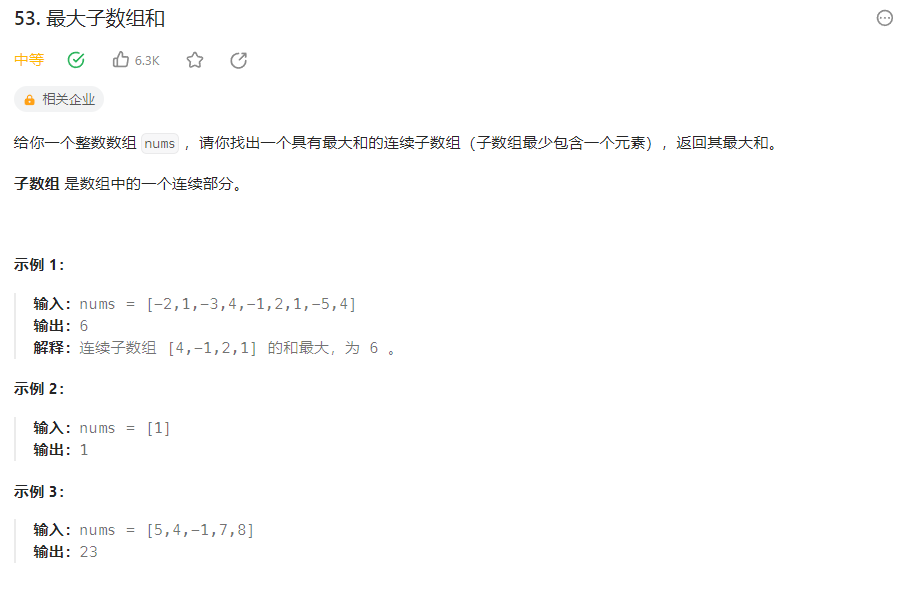
一、思路 动态规划 二、解题方法 使用了两个变量 maxSum 和 currentSum 来分别记录全局的最大和和当前连续子数组的和。遍历数组时,我们不断更新 currentSum,并比较是否需要更新 maxSum。最后,maxSum 就是最大的连续子数组和。 三、code …...

京东云接入【风险识别】接口
京东云的接入文档写的真的跟逗你玩一样,就给提供了一个简单的实例,其他的全靠自己摸索。 这篇文章描述的是激动云【风险识别接口】接入,也会介绍如何接入其他的一些未在文章内描述到的接口。 这里使用的是python SDK,先安装 pip…...
在 linux 虚拟机上安装配置 hive
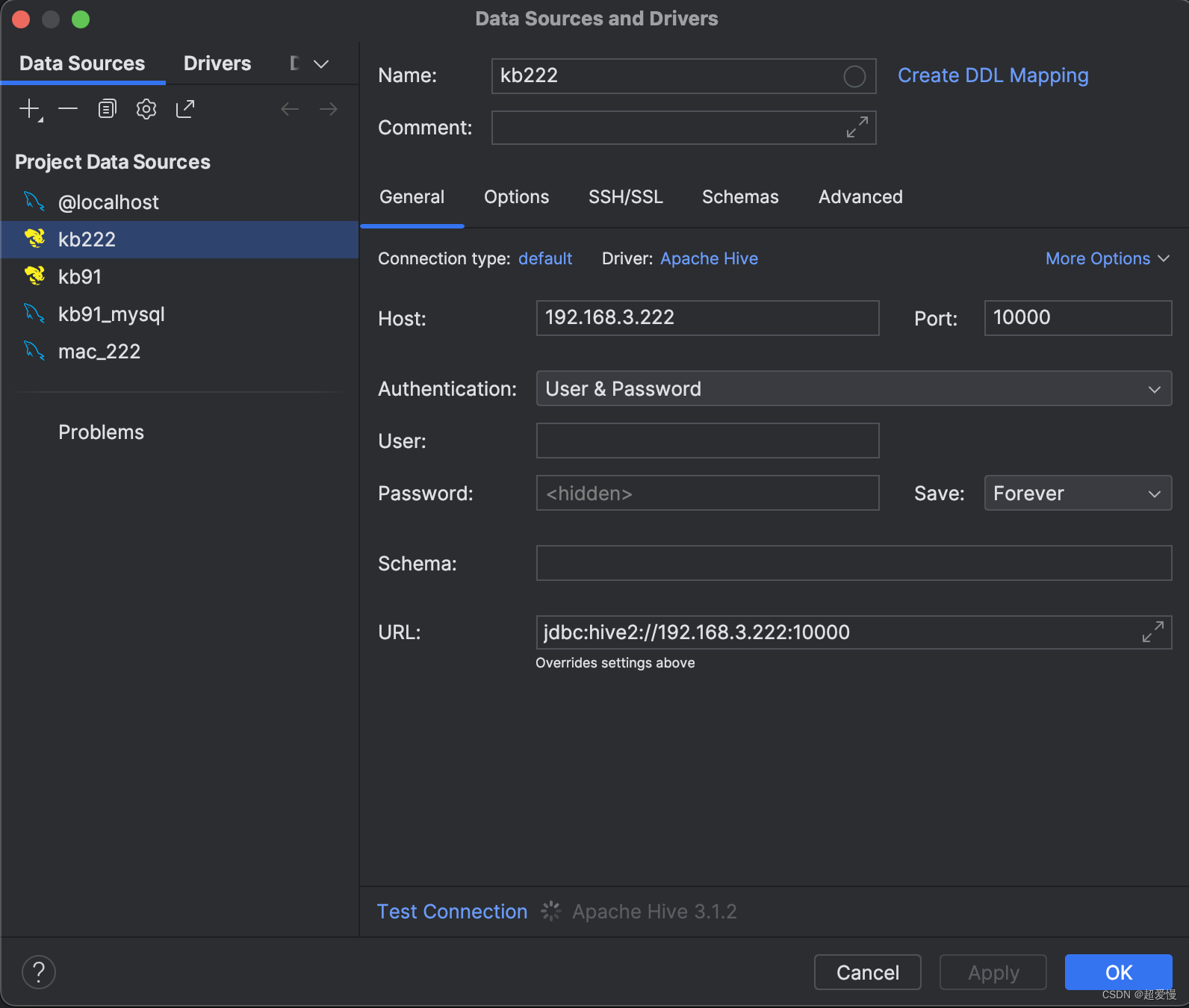
目录 一 下载hive 安装包 二 解压 hive 并配置环境变量 三 配置hive 的配置文件 四 更新 guava 五 hive初始化 六 开启远程连接 七 使用datagrip 连接 hive 一 下载hive 安装包 百度网盘资源如下: 链接: https://pan.baidu.com/s/18jF-Qri0hc52_rtL61O0YQ?…...

作品集(陆续上传中)
智能家居---不断完善中 家居-CSDN直播 家居 语音刷抖音 --- 基于串口和adb 基于守护进程的语音刷抖音-CSDN直播 基于守护进程的语音刷抖音 海天一色项目 --- 船舶靠港零碳排加热器 FTP云盘 --- 多进程和socket FTP云盘-CSDN直播 FTP云盘...
论文解读 | 三维点云深度学习的综述
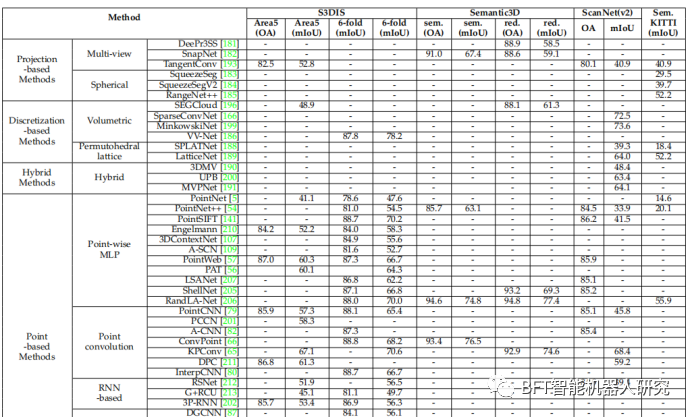
原创 | 文 BFT机器人 KITTI 是作为基准测试是自动驾驶中最具影响力的数据集之一,在学术界和工业界都被广泛使用。现有的三维对象检测器存在着两个限制。第一是现有方法的远程检测能力相对较差。其次,如何充分利用图像中的纹理信息仍然是一个开放性的问题…...
基于costas环的载波同步系统matlab性能仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 matlab2022a 3.部分核心程序 ............................................................................ I_Dataroun…...

解码自我注意的魔力:深入了解其直觉和机制
一、说明 自我注意机制是现代机器学习模型中的关键组成部分,尤其是在处理顺序数据时。这篇博文旨在提供这种机制的详细概述,解释它是如何工作的,它的优点,以及它背后的数学原理。我们还将讨论它在变压器模型中的实现和多头注意力的…...

mysql之存储引擎
目录 存储引擎概念 MyISAM MyISAM特点 MyISAM 表的存储格式 MyISAM适用的生产场景 InnoDB InnoDB特点 选择存储引擎依据 MyISAM 和 INNODB区别 命令 查看系统支持的存储引擎 查看表使用的存储引擎 修改存储引擎 存储引擎概念 MySQL中的数据用各种不同的技术存…...
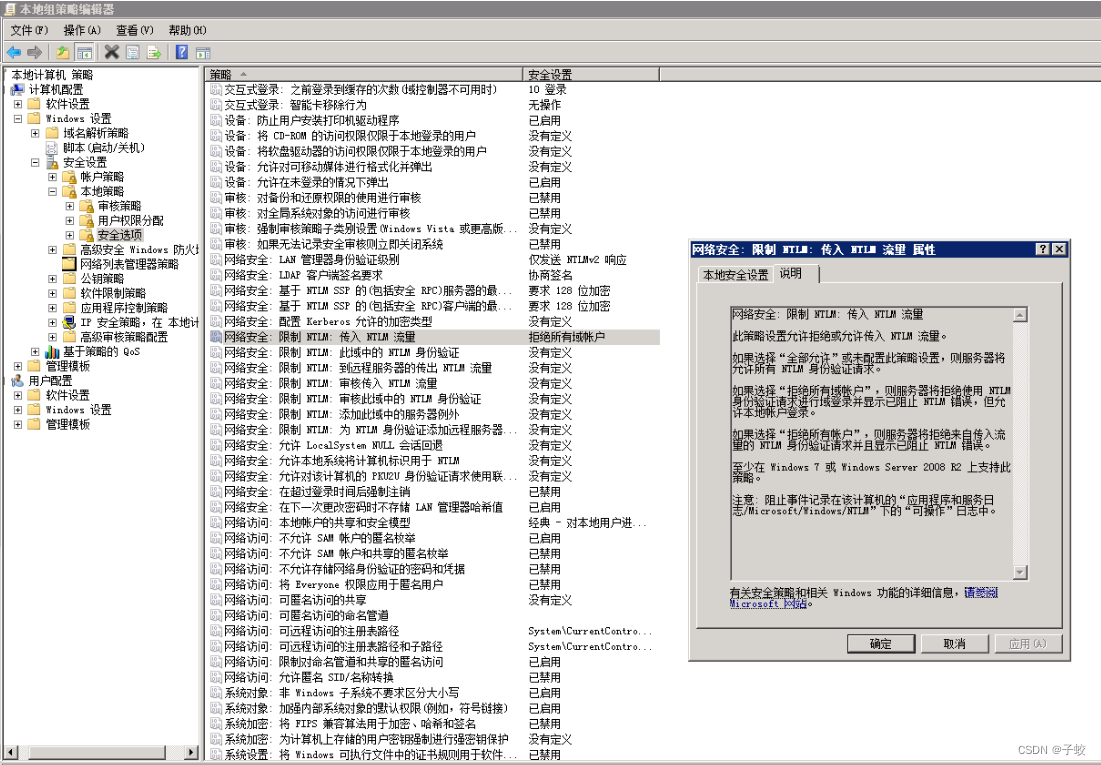
服务器日志出现大量NTLM(NT LAN Manager)攻击
日志名称:Security 来源: Microsoft-Windows-Security-Auditing 日期: 2023/8/30 20:57:40 事件 ID:4625 任务类别:登录 级别: 信息 关键字: 审核失败 用户: 暂缺 计算机: WIN-QBJ3ORTR0CF 描述: 帐户登录失败。 主题: 安全 ID:NULL SID 帐户名:- 帐户域:- …...
Spring学习|Spring简介、IOC控制反转理解、IOC创建对象方式
Spring Spring:春天------>给软件行业带来了春天! 2002,首次推出了Spring框架的雏形: interface21框架! Spring框架即以interface21框架为基础,经过重新设计,并不断丰富其内涵,于2004年3月24日发布了1.0正式版。 RodJohnson,Spring Framework创始人&…...
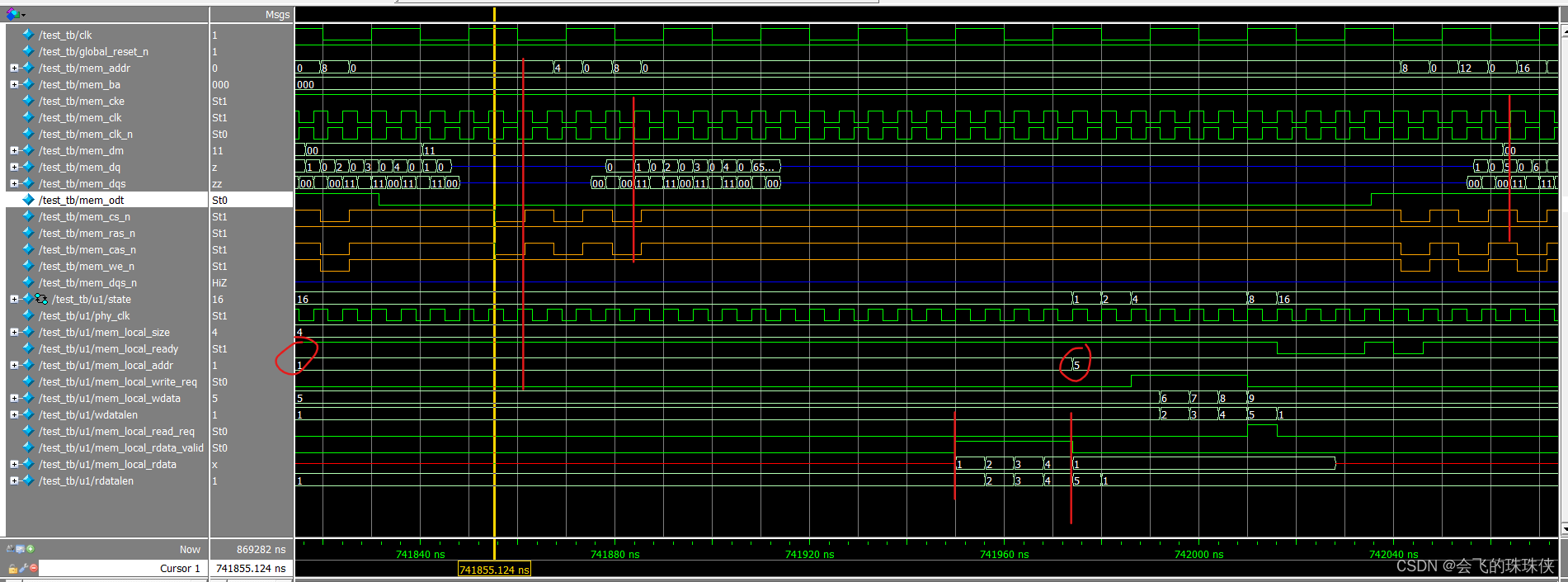
DDR2 IP核调式记录2
本文相对简单,只供自己看看就行。从其它的博客找了个代码,然后记录下仿真波形。 1. 功能 直接使用quartus生成的DDR2 IP核,然后实现循环 -->写入burst长度的数据后读出。 代码数据的传输是32位,实际使用了两片IC。因此IP核也是…...

【ES6】js 中class的extends、super关键字用法和避坑点
在JavaScript中,使用class关键字可以实现面向对象编程。其中,extends和super是两个非常重要的关键字,它们分别用于实现类的继承和调用父类的方法。 一、extends关键字 extends关键字用于实现类的继承,它可以让一个子类继承父类的…...

简历投了全石沉大海?实测3个免费AI简历神器,HR秒通过、面试翻3倍!
3个实测免费的AI简历神器,不用花钱、不用登录,直接让简历过ATS、获面试,应届生/职场人闭眼冲!简历优化本身就讲究精准度,尤其是ATS筛选逻辑,很多工具要么收费高,要么改完还是不贴合JD࿰…...

Thanos剪枝算法:高效压缩大型语言模型的技术解析
1. 项目概述:Thanos剪枝算法解析在深度学习领域,大型语言模型(LLM)的参数量已突破千亿级别,这对计算资源和内存提出了极高要求。模型剪枝技术通过移除神经网络中的冗余连接,能在保持模型性能的同时显著降低…...
)
ElevenLabs语音克隆效果翻倍秘技(实测SSML+声纹嵌入+噪声抑制三重优化)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs语音克隆效果翻倍秘技(实测SSML声纹嵌入噪声抑制三重优化) ElevenLabs 的语音克隆能力虽强,但原始 API 调用常因语调扁平、背景干扰与韵律失真导致真实感不…...

Gita异步执行机制详解:高效管理大型项目的核心技术
Gita异步执行机制详解:高效管理大型项目的核心技术 【免费下载链接】gita Manage many git repos with sanity 从容管理多个git库 项目地址: https://gitcode.com/gh_mirrors/gi/gita 在现代软件开发中,开发者经常需要同时管理多个Git仓库。随着项…...
)
Altium Designer 22 导出嘉立创SMT文件保姆级教程(附BOM/坐标文件避坑指南)
Altium Designer 22 导出嘉立创SMT文件全流程解析与实战技巧 在电子设计领域,从手工焊接转向SMT贴片生产是一个关键的进阶步骤。对于使用Altium Designer(简称AD)的设计师来说,掌握正确的文件导出方法不仅能节省大量时间ÿ…...

insert_order 报单类型怎么选:限价、FAK 与 FOK 期货场景
前言 在天勤量化里,insert_order 是程序化下单的核心接口。报单类型选错,常见后果是撤单狂增、部分成交后敞口裸露,或回测里假设能成交而实盘挂在板上。下面按期货里常用的限价、FAK、FOK 等说明适用场景,并给出最小调用片段。 …...

STL编程中EN/ENO机制详解:从原理到仿真实践
1. 项目概述:理解STL中的EN/ENO机制在工业自动化编程领域,尤其是可编程逻辑控制器(PLC)的编程中,结构化文本(STL)是一种高级的、类似于Pascal或C的文本化编程语言。对于从梯形图(LAD…...

AI智能体开发实战:agent-skills工具库核心技能解析与应用
1. 项目概述与核心价值最近在折腾AI智能体开发,发现一个挺有意思的现象:很多开发者,包括我自己在内,一开始都热衷于去研究那些大型的、功能全面的智能体框架,试图打造一个“全能”的AI助手。但实际落地时,往…...

智能代理模式在渗透测试中的应用:pentestagent架构解析与实战
1. 项目概述与核心价值最近在安全测试和红队演练的圈子里,一个名为GH05TCREW/pentestagent的项目开始被频繁提及。乍一看这个名字,你可能会觉得它又是一个普通的渗透测试工具集,但当你真正深入去研究和使用它时,会发现它的设计理念…...
)
手把手教你用TTL线刷救活咪咕MGV3200盒子(GK6323V100C芯片/安卓9系统)
咪咕MGV3200盒子救砖全指南:从TTL焊接到底层刷机实战 当你的咪咕MGV3200电视盒子因为一次鲁莽的卡刷操作变成"砖头",指示灯不再亮起,屏幕一片漆黑时,那种绝望感只有经历过的人才能体会。不同于普通刷机教程,…...