从零开始学习deepsort目标追踪算法----原理和代码详解
目录
1.目标追踪的主要步骤
2、传统sort算法的流程
3.Deepsort算法流程
4、目标追踪整体代码
4.1 Configs文件目录下:
4.2 deep_sort/deep_sort/deep目录下:
4.3 deep_sort/deep_sort/sort目录下:
运行demo:
DeepSORT(Deep learning based SORT)是一种基于深度学习的视觉目标跟踪算法,它结合了深度学习和传统的目标跟踪算法SORT(Simple Online and Realtime Tracking)。
DeepSORT基于目标检测器(如YOLO、Faster R-CNN等)检测每一帧图像中的目标,并使用多特征融合(Muti-feature Fusion)技术对目标进行表示和描述,然后使用SORT算法对目标进行跟踪。在SORT算法的基础上,DeepSORT引入了Re-IDentification(Re-ID)模型来解决目标ID的确定问题,Re-ID模型通过计算目标在多个帧图像中的相似度来确定目标的唯一ID。
DeepSORT算法的优点是:精度高,鲁棒性强,对于目标的遮挡、形变等情况具有很好的适应性。它已经被广泛应用于行人、车辆等目标的跟踪和智能视频监控等领域。
1.目标追踪的主要步骤
- 获取原始视频帧
- 利用目标检测器对视频帧中的目标进行检测
- 将检测到的目标的框中的特征提取出来,该特征包括表观特征(方便特征对比避免ID switch)和运动特征(运动特征方便卡尔曼滤波对其进行预测)
- 计算前后两帧目标之前的匹配程度(利用匈牙利算法和级联匹配),为每个追踪到的目标分配ID。
2、传统sort算法的流程
Deepsort的前身是sort算法,sort算法的核心是卡尔曼滤波算法和匈牙利算法。
卡尔曼滤波算法作用:该算法的主要作用就是当前的一系列运动变量去预测下一时刻的运动变量,但是第一次的检测结果用来初始化卡尔曼滤波的运动变量。
匈牙利算法的作用:简单来讲就是解决分配问题,就是把一群检测框和卡尔曼预测的框做分配,让卡尔曼预测的框找到和自己最匹配的检测框,达到追踪的效果。
sort工作流程如下图所示:
Detections是通过目标检测到的框框。Tracks是轨迹信息。
(1)将第一帧检测到的结果创建其对应的Tracks。将卡尔曼滤波的运动变量初始化,通过卡尔曼滤波预测其对应的框框。
(2)将该帧目标检测的框框和上一帧通过Tracks预测的框框一一进行IOU匹配,再通过IOU匹配的结果计算其代价矩阵(cost matrix,其计算方式是1-IOU)。
(3)将(2)中得到的所有的代价矩阵作为匈牙利算法的输入,得到线性的匹配的结果,这时候我们得到的结果有三种,第一种是Tracks失配(Unmatched Tracks),我们直接将失配的Tracks删除;第二种是Detections失配(Unmatched Detections),我们将这样的Detections初始化为一个新的Tracks(new Tracks);第三种是检测框和预测的框框配对成功,这说明我们前一帧和后一帧追踪成功,将其对应的Detections通过卡尔曼滤波更新其对应的Tracks变量。
(4)反复循环(2)-(3)步骤,直到视频帧结束。
3.Deepsort算法流程
由于sort算法还是比较粗糙的追踪算法,当物体发生遮挡的时候,特别容易丢失自己的ID。而Deepsort算法在sort算法的基础上增加了级联匹配(Matching Cascade)和新轨迹的确认(confirmed)。Tracks分为确认态(confirmed),和不确认态(unconfirmed),新产生的Tracks是不确认态的;不确认态的Tracks必须要和Detections连续匹配一定的次数(默认是3)才可以转化成确认态。确认态的Tracks必须和Detections连续失配一定次数(默认30次),才会被删除。
Deepsort算法的工作流程如下图所示:
整个算法的工作流程如下:
(1)将第一帧次检测到的结果创建其对应的Tracks。将卡尔曼滤波的运动变量初始化,通过卡尔曼滤波预测其对应的框框。这时候的Tracks一定是unconfirmed的。
(2)将该帧目标检测的框框和第上一帧通过Tracks预测的框框一一进行IOU匹配,再通过IOU匹配的结果计算其代价矩阵(cost matrix,其计算方式是1-IOU)。
(3)将(2)中得到的所有的代价矩阵作为匈牙利算法的输入,得到线性的匹配的结果,这时候我们得到的结果有三种,第一种是Tracks失配(Unmatched Tracks),我们直接将失配的Tracks(因为这个Tracks是不确定态了,如果是确定态的话则要连续达到一定的次数(默认30次)才可以删除)删除;第二种是Detections失配(Unmatched Detections),我们将这样的Detections初始化为一个新的Tracks(new Tracks);第三种是检测框和预测的框框配对成功,这说明我们前一帧和后一帧追踪成功,将其对应的Detections通过卡尔曼滤波更新其对应的Tracks变量。
(4)反复循环(2)-(3)步骤,直到出现确认态(confirmed)的Tracks或者视频帧结束。
(5)通过卡尔曼滤波预测其确认态的Tracks和不确认态的Tracks对应的框框。将确认态的Tracks的框框和是Detections进行级联匹配(之前每次只要Tracks匹配上都会保存Detections其的外观特征和运动信息,默认保存前100帧,利用外观特征和运动信息和Detections进行级联匹配,这么做是因为确认态(confirmed)的Tracks和Detections匹配的可能性更大)。
(6)进行级联匹配后有三种可能的结果。第一种,Tracks匹配,这样的Tracks通过卡尔曼滤波更新其对应的Tracks变量。第二第三种是Detections和Tracks失配,这时将之前的不确认状态的Tracks和失配的Tracks一起和Unmatched Detections一一进行IOU匹配,再通过IOU匹配的结果计算其代价矩阵(cost matrix,其计算方式是1-IOU)。
(7)将(6)中得到的所有的代价矩阵作为匈牙利算法的输入,得到线性的匹配的结果,这时候我们得到的结果有三种,第一种是Tracks失配(Unmatched Tracks),我们直接将失配的Tracks(因为这个Tracks是不确定态了,如果是确定态的话则要连续达到一定的次数(默认30次)才可以删除)删除;第二种是Detections失配(Unmatched Detections),我们将这样的Detections初始化为一个新的Tracks(new Tracks);第三种是检测框和预测的框框配对成功,这说明我们前一帧和后一帧追踪成功,将其对应的Detections通过卡尔曼滤波更新其对应的Tracks变量。
(8)反复循环(5)-(7)步骤,直到视频帧结束。
4、目标追踪整体代码
下面对目标追踪的重要代码的功能进行一个讲解
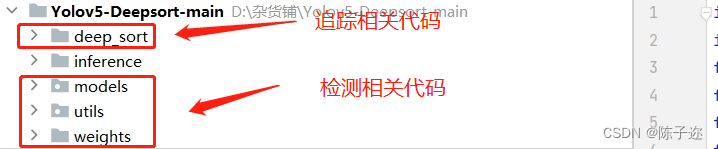
首先代码分为三个部分:
- 目标追踪的相关代码和权重
- 目标检测相关代码和权重,这里用的是yolov5.5目标检测算法
- 调用检测和追踪代码相关py文件
目标检测的内容可以看其他文章
这里主要讲解目标追踪相关代码部分。主要的py文件如下图所示:下面将逐个讲解每个py文件的主要功能。

主要功能
4.1 Configs文件目录下:
deep_sort.yaml:这个yaml文件主要是保存一些参数。
(1)里面有特征提取权重的目录路径;
(2)最大余弦距离,用于级联匹配,如果大于该阈值,则忽略。
(3)检测结果置信度阈值
(4)非极大抑制阈值,设置为1代表不进行抑制
(5)最大IOU阈值
(6)最大寿命,也就是经过MAX_AGE帧没有追踪到该物体,就将该轨迹变为删除态。
(7)最高击中次数,如果击中该次数,就由不确定态转为确定态。
(8)最大保存特征帧数,如果超过该帧数,将进行滚动保存。
4.2 deep_sort/deep_sort/deep目录下:
ckpt.t7:这是一个特征提取网络的权重文件,特征提取网络训练好了以后会生成这个权重文件,方便在目标追踪的时候提取目标框中的特征,在目标追踪的时候避免ID switch。
evaluate.py:计算特征提取模型精确度。
feature_extractor.py:提取对应bounding box中的特征, 得到一个固定维度的特征,作为该bounding box的代表,供计算相似度时使用。
model.py:特征提取网络模型,该模型用来提取训练特征提取网络权重。
train.py:训练特征提取网络的python文件
test.py:测试训练好的特征提取网络的性能
4.3 deep_sort/deep_sort/sort目录下:
detection.py:保存通过目标检测的一个检测框框,以及该框的置信度和获取的特征;同时还提供了框框的各种格式的转化方法。
iou_matching.py:计算两个框框之间的IOU。
kalman_filter.py:卡尔曼滤波器的相关代码,主要是利用卡尔曼滤波来预测检测框的轨迹信息。
linear_assignment.py:利用匈牙利算法匹配预测的轨迹框和检测框最佳匹配效果。
nn_matching.py:通过计算欧氏距离、余弦距离等距离来计算最近领距离。
preprocessing.py:非极大抑制代码,利用非极大抑制算法将最优的检测框输出。
track.py:主要储存的是轨迹信息,其中包括轨迹框的位置和速度信息,轨迹框的ID和状态,其中状态包括三种,一种是确定态、不确定态、删除态三种状态。
tracker.py:保存了所有的轨迹信息,负责初始化第一帧,卡尔曼滤波的预测和更新,负责级联匹配,IOU匹配。
deep_sort/deep_sort/deep_sort.py:deepsort的整体封装,实现一个deepsort追踪的一个整体效果。
deep_sort/utils:这里最主要有一些各种各样的工具python代码,例如画框工具,日志保存工具等等。
链接:https://pan.baidu.com/s/1uORzJIav2z2SXMqaBfJ5pQ
提取码:ztaw
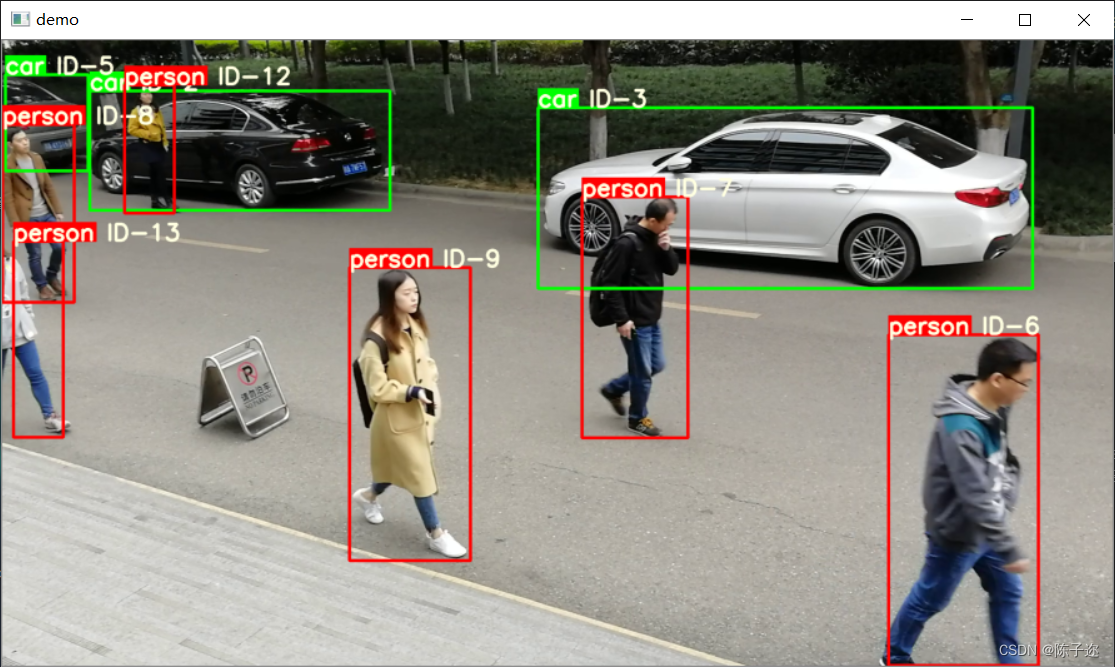
运行demo:
result
下一章讲解怎么训练自己的特征提取网络
相关文章:
从零开始学习deepsort目标追踪算法----原理和代码详解
目录 1.目标追踪的主要步骤 2、传统sort算法的流程 3.Deepsort算法流程 4、目标追踪整体代码 4.1 Configs文件目录下: 4.2 deep_sort/deep_sort/deep目录下: 4.3 deep_sort/deep_sort/sort目录下: 运行demo: DeepSORT&…...
第三章 LInux多线程开发 3.1-3.5线程创建 终止 分离
创建线程:(好好记住 可能会叫写代码) 一般情况下,main函数所在的线程我们称之为主线程(main线程),其余创建的线程称之为子线程。 程序中默认只有一个进程,fork()函数调用,2进行 程序…...
空间曲线的参数方程
空间曲线的参数方程 二维直线 经过一点 P ( x 0 , y 0 ) P(x_0,y_0) P(x0,y0)的方向向量为 n ( c o s θ , s i n θ ) n(cos\theta,sin\theta) n(cosθ,sinθ)的直线参数方程为: [ x y …...

非华为机型如何体验HarmonyOS鸿蒙系统 刷写HarmonyOS鸿蒙GSI系统以及一些初步的bug修复
最近很多视频网站有非华为机型使用HarmonyOS鸿蒙系统的演示。其实大都是刷了HarmonyOS鸿蒙系统gsi系统。体验还可以。有些刷入后bug较多。那么这些机型是如何刷写gsi?可以参考我以往帖子 安卓玩机搞机-----没有第三方包 刷写第三方各种GSI系统 体验非官方系统_gsi刷…...

Flutter 生成小程序的混合 App 实践
一、背景 微信小程序发展的越来越快,目前小程序甚至取代了大部分 App 的生态位,公司的坑位不增反降,只能让原生应用开发兼顾或换岗进行小程序的开发。 以我的实际情况来讲,公司应用采用的 Flutter 框架,同样的功能不可避免的就会存在 Flutter 应用开发和微信小程序开发兼…...

利用 Python-user-agents 解析 User_Agent
利用 Python-user-agents 解析 User_Agen 需求分析 近期在尝试做一个登录日志的功能,及用户登录成功后我在后台进行一个用户的登录记录,两种解决方案: 由前端得到用户的手机型号,我在后台接收后在数据库进行保存使用User_Agent…...
Java版企业电子招标采购系统源码Spring Cloud + Spring Boot +二次开发+ MybatisPlus + Redis
功能描述 1、门户管理:所有用户可在门户页面查看所有的公告信息及相关的通知信息。主要板块包含:招标公告、非招标公告、系统通知、政策法规。 2、立项管理:企业用户可对需要采购的项目进行立项申请,并提交审批,查看…...

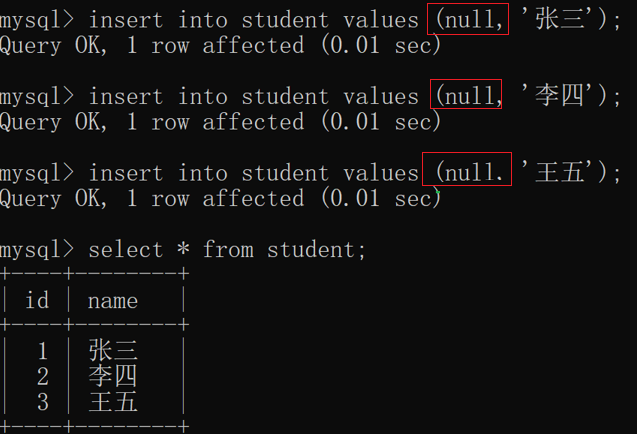
Mybatis如何给字段起别名?
Mybatis如何给字段起别名? 假如有一个学生表,有一个字段是class,你的实体类变量肯定不能用class,那么如何起别名? 通过以下代码实现 Result(column "class",property "clas")mapper代码 pub…...
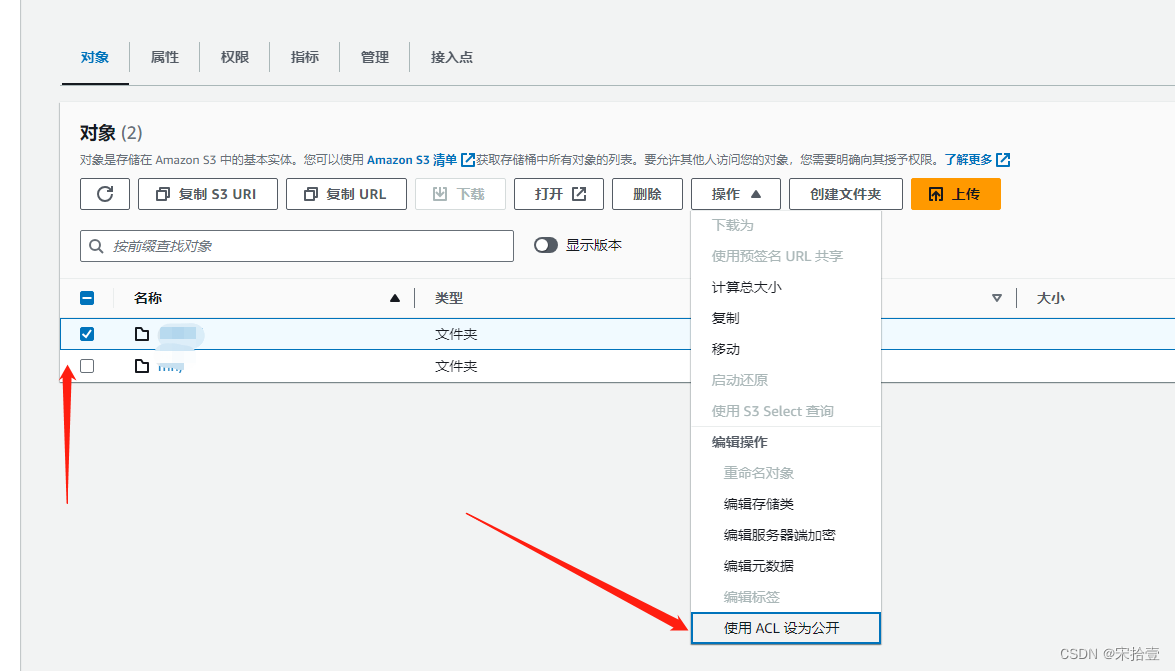
php对接AWS S3云存储,上传S3及访问权限问题
首先先下载sdk包 https://docs.aws.amazon.com/zh_cn/sdk-for-php/v3/developer-guide/getting-started_installation.html S3创建存储桶 去安全凭证-》创建访问秘钥 创建的时候会提示,主账号创建不安全,这个时候我们需要创建一个IAM账号来创建秘钥 创…...

java 实现单例模式
单例模式是一种设计模式,用于确保一个类只有一个实例,并提供一种全局访问该实例的方式。在Java中,可以使用多种方式来实现单例模式,下面整理了几种常见的实现方式。 饿汉式单例模式(Eager Initialization)&…...

minio文件服务器开启https
一、准备证书 你要有https安全证书,我的是适用于nginx的证书 私钥 xxxx.key 公钥 xxxx.pem 二、上传证书到minio服务器 然后看看你的minio docker 有没有把 /root/.minio 挂载在主机上,如果有那么把两个证书文件放在/root/.minio/certs目录里面。…...

每日刷题(回溯法经典问题之子集)
食用指南:本文为作者刷题中认为有必要记录的题目 前置知识:回溯法经典问题之组合 ♈️今日夜电波:想着你—郭顶 1:09 ━━━━━━️💟──────── 4:15 …...

PostgreSQL在进行除法时要注意
背景 整型除以整型,正常情况下当然得到的应该也是整型。数据库也是这么干的。 但是在数据库应用中,通常业务的需求是得到NUMERIC,不能直接把小数干掉。 数据库的行为给用户带来了诸多不便,例如1除以2,如果是整型除法会…...
开开心心带你学习MySQL数据库之第五篇
😺欢迎来到我的博客, 记得点赞👍收藏⭐️留言✍️🐱 🐉做为一个怪兽,我的目标是少消灭一个奥特曼🐉 📖希望我写的博客对你有所帮助,如有不足,请指正📖 chatgpt 是否能够代替程序猿?…...

Geotools对geojson的解析
在 GeoTools 中,对 GeoJSON 的支持是通过一个插件来完成的,用户同样可以在 Maven 的 pom.xml 配置文件中添加下述的依赖。 <dependency><groupId>org.geotools</groupId><artifactId>gt-geojson</artifactId><version&…...

【博客701】shell实现保留网络现场:ping失败时执行mtr
shell实现保留网络现场:ping失败时执行mtr 场景 当我们网络出现抖动,到某个目的地ping不通时,我们想知道路径上哪里出现问题时可以在那时候执行mtr并保留下现场以供排查 实现:ping_and_mtr.sh #!/bin/bash# 定义要ping的IP地址列…...
放弃手写代码吧!用低代码你能生成各种源码
很多同学不知道为什么要用Low-code做开发,传统IT开发不行么?当然可以。 传统IT自研软件开发,通过编程去写代码,还有数据库、API、第三方基础架构等。这个方式很好,但不可避免的会带来开发周期长、难度大,技…...

什么程度才算精通 Linux?
前言 Linux 的优秀之处自然不必多说。 如果将操作系统比作一辆汽车,那 Linux 就是一辆性能出色的多功能越野车,上山下海飞天无所不能。 如果你拥有了它,一定不会只满足于驾驶它上下班,不能只会挂挡、踩油门和控制方向之类的基本…...

jmeter中的__setProperty用法
__setProperty 是一个用于设置 JMeter 属性的函数,基本语法: __setProperty(property, value)** property : 是要设置的属性的名称 ** value : 是要设置的属性的值在 JMeter中,可以使用 __setProperty 函数的元素: BeanShell …...
vue基础知识六:v-show和v-if有什么区别?使用场景分别是什么?
一、v-show与v-if的共同点 我们都知道在 vue 中 v-show 与 v-if 的作用效果是相同的(不含v-else),都能控制元素在页面是否显示 在用法上也是相同的 <Model v-show"isShow" /> <Model v-if"isShow" />当表达式为true的时候&#…...

终极指南:如何在Windows电脑上免费预览iPhone的HEIC照片
终极指南:如何在Windows电脑上免费预览iPhone的HEIC照片 【免费下载链接】windows-heic-thumbnails Enable Windows Explorer to display thumbnails for HEIC/HEIF files 项目地址: https://gitcode.com/gh_mirrors/wi/windows-heic-thumbnails 你是否经常遇…...

ThinkPad风扇控制深度指南:TPFanCtrl2架构解析与高级配置
ThinkPad风扇控制深度指南:TPFanCtrl2架构解析与高级配置 【免费下载链接】TPFanCtrl2 ThinkPad Fan Control 2 (Dual Fan) for Windows 10 and 11 项目地址: https://gitcode.com/gh_mirrors/tp/TPFanCtrl2 TPFanCtrl2是一款专为ThinkPad笔记本电脑设计的Wi…...
)
【法学研究效率革命】:NotebookLM如何将文献综述时间压缩73%?(20年法律AI实践者亲测)
更多请点击: https://codechina.net 第一章:NotebookLM法学研究辅助 NotebookLM 是 Google 推出的基于用户自有文档构建的 AI 助手,其核心能力在于对上传文本进行深度语义理解与上下文感知问答。在法学研究场景中,它可高效处理判…...

电压跟随器:从原理到实战,如何用它解决信号传输的三大难题?
1. 电压跟随器:电子工程师的"信号保镖" 第一次接触电压跟随器时,我正被一个传感器信号传输问题折磨得焦头烂额。当时用STM32采集热电偶温度信号,明明传感器端测量正常,但MCU接收到的数值总是飘忽不定。直到前辈指着原理…...

NotebookLM脑机接口安全红线清单,3类合规风险已致2家医疗AI公司终止临床试验
更多请点击: https://intelliparadigm.com 第一章:NotebookLM脑机接口研究 NotebookLM 是 Google 推出的基于用户自有文档进行深度理解与推理的 AI 助手,其核心能力在于语义锚定(semantic grounding)与多源文档交叉推…...

暗黑破坏神2存档修改器终极指南:5分钟掌握Diablo Edit2完整教程
暗黑破坏神2存档修改器终极指南:5分钟掌握Diablo Edit2完整教程 【免费下载链接】diablo_edit Diablo II Character editor. 项目地址: https://gitcode.com/gh_mirrors/di/diablo_edit 你是否曾经在暗黑破坏神2中花费数小时刷装备却一无所获?是否…...

突破百度网盘下载限速:macOS逆向工程实践指南
突破百度网盘下载限速:macOS逆向工程实践指南 【免费下载链接】BaiduNetdiskPlugin-macOS For macOS.百度网盘 破解SVIP、下载速度限制~ 项目地址: https://gitcode.com/gh_mirrors/ba/BaiduNetdiskPlugin-macOS 对于macOS用户而言,百度网盘的下载…...

进化智能体实战:从基因编码到种群优化的完整实现指南
1. 项目概述:从蓝图到智能体,一次开源协作的深度实践最近在开源社区里,一个名为planck-lab/hermes-evolving-agents-public-blueprint的项目引起了我的注意。乍一看这个标题,它像是一个技术蓝图或公开的设计文档,但深入…...

从日志到环境变量:根治 Android Studio AVD 启动报错“The emulator process has terminated”
1. 从错误弹窗到日志分析:定位问题的第一步 当你兴冲冲地打开Android Studio准备启动AVD(Android Virtual Device)时,突然弹出一个冰冷的提示框:"The emulator process has terminated",这感觉就…...

Onekey:重构Steam Depot清单下载流程的现代化解决方案
Onekey:重构Steam Depot清单下载流程的现代化解决方案 【免费下载链接】Onekey Onekey Steam Depot Manifest Downloader 项目地址: https://gitcode.com/gh_mirrors/one/Onekey Onekey作为一款专为Steam Depot清单设计的自动化下载工具,通过其创…...