智能小车—PWM方式实现小车调速和转向
目录
1. 让小车动起来
2. 串口控制小车方向
3. 如何进行小车PWM调速
4. PWM方式实现小车转向
1. 让小车动起来
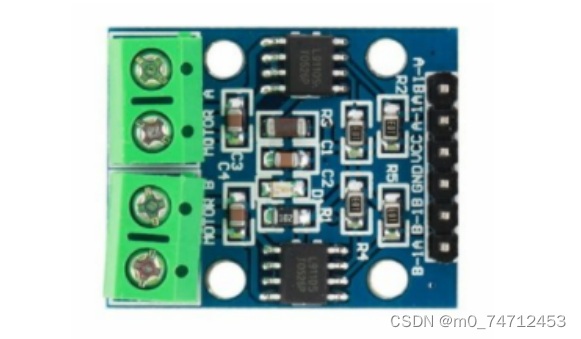
电机模块开发
L9110s概述
接通VCC,GND 模块电源指示灯亮, 以下资料来源官方,具体根据实际调试
IA1输入高电平,IA1输入低电平,【OA1 OB1】电机正转;
IA1输入低电平,IA1输入高电平,【OA1 OB1】电机反转;
IA2输入高电平,IA2输入低电平,【OA2 OB2】电机正转;
IA2输入低电平,IA2输入高电平,【OA2 OB2】电机反转;
核心代码:
#include "reg52.h"
#include "intrins.h"sbit RightCon1A = P3^2;
sbit RightCon1B = P3^3;sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;void Delay1000ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 8;j = 1;k = 243;do{do{while (--k);} while (--j);} while (--i);
}void goForward()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 1;
}void goLeft()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 1;
}void goRight()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 0;
}void goBack()
{LeftCon1A = 1;LeftCon1B = 0;RightCon1A = 1;RightCon1B = 0;
}void main()
{while(1){goForward();Delay1000ms();Delay1000ms();goBack();Delay1000ms();Delay1000ms();goLeft();Delay1000ms();Delay1000ms();goRight();Delay1000ms();Delay1000ms();}
}2. 串口控制小车方向
串口介绍:
串行接口简称串口,也称串行通信接口或串行通讯接口(通常指COM接口),是采用串行通信方 式的扩展接口。串行接口(Serial Interface)是指数据一位一位地顺序传送。其特点是通信线路简 单,只要一对传输线就可以实现双向通信(可以直接利用电话线作为传输线),从而大大降低了成 本,特别适用于远距离通信,但传送速度较慢
- 串口分文件编程进行代码整合——通过现象来改代码
- 接入蓝牙模块,通过蓝牙控制小车
- 添加点动控制,如果APP支持按下一直发数据,松开就停止发数据(蓝牙调试助手的自定义按键不 能实现),就能实现前进按键按下后小车一直往前走的功能
3. 如何进行小车PWM调速
原理: 全速前进是LeftCon1A = 0; LeftCon1B = 1;完全停止是LeftCon1A = 0;LeftCon1B = 0;那么单位时 间内,比如20ms, 有15ms是全速前进,5ms是完全停止, 速度就会比5ms全速前进,15ms完全停止获得的功率多,相应的速度更快!
开发:借用PWM的舵机控制代码
核心代码:
#include "motor.h"
#include "delay.h"
#include "uart.h"
#include "time.h"extern char speed;void main()
{Time0Init();//UartInit();while(1){speed = 10;//10份单位时间全速运行,30份停止,所以慢,20ms是40份的500usDelay1000ms();Delay1000ms();speed = 20;Delay1000ms();Delay1000ms();speed = 40;Delay1000ms();Delay1000ms();}
}//time.c
#include "motor.h"
#include "reg52.h"char speed;
char cnt = 0;void Time0Init()
{//1. 配置定时器0工作模式位16位计时TMOD = 0x01;//2. 给初值,定一个0.5出来TL0=0x33;TH0=0xFE;//3. 开始计时TR0 = 1;TF0 = 0;//4. 打开定时器0中断ET0 = 1;//5. 打开总中断EAEA = 1;
}void Time0Handler() interrupt 1
{cnt++; //统计爆表的次数. cnt=1的时候,报表了1//重新给初值TL0=0x33;TH0=0xFE;//控制PWM波if(cnt < speed){//前进goForward();}else{//停止stop();}if(cnt == 40){//爆表40次,经过了20mscnt = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s}}4. PWM方式实现小车转向
原理: 左轮定时器0调速,右轮定时器1调速,那么左转就是右轮速度大于左轮!
核心代码:
#include "motor.h"
#include "reg52.h"char speedLeft;
char cntLeft = 0;char speedRight;
char cntRight = 0;void Time1Init()
{//1. 配置定时器1工作模式位16位计时TMOD &= 0x0F;TMOD |= 0x1 << 4;//2. 给初值,定一个0.5出来TL1=0x33;TH1=0xFE;//3. 开始计时TR1 = 1;TF1 = 0;//4. 打开定时器1中断ET1 = 1;//5. 打开总中断EAEA = 1;
}void Time0Init()
{//1. 配置定时器0工作模式位16位计时TMOD = 0x01;//2. 给初值,定一个0.5出来TL0=0x33;TH0=0xFE;//3. 开始计时TR0 = 1;TF0 = 0;//4. 打开定时器0中断ET0 = 1;//5. 打开总中断EAEA = 1;
}void Time1Handler() interrupt 3
{cntRight++; //统计爆表的次数. cnt=1的时候,报表了1//重新给初值TL1=0x33;TH1=0xFE;//控制PWM波if(cntRight < speedRight){//右前进goForwardRight();}else{//停止stopRight();}if(cntRight == 40){//爆表40次,经过了20mscntRight = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s}}void Time0Handler() interrupt 1
{cntLeft++; //统计爆表的次数. cnt=1的时候,报表了1//重新给初值TL0=0x33;TH0=0xFE;//控制PWM波if(cntLeft < speedLeft){//左前进goForwardLeft();}else{//停止stopLeft();}if(cntLeft == 40){//爆表40次,经过了20mscntLeft = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s}}相关文章:
智能小车—PWM方式实现小车调速和转向
目录 1. 让小车动起来 2. 串口控制小车方向 3. 如何进行小车PWM调速 4. PWM方式实现小车转向 1. 让小车动起来 电机模块开发 L9110s概述 接通VCC,GND 模块电源指示灯亮, 以下资料来源官方,具体根据实际调试 IA1输入高电平,…...

Getx其他高级API
// 给出当前页面的args。 Get.arguments//给出以前的路由名称 Get.previousRoute// 给出要访问的原始路由,例如,rawRoute.isFirst() Get.rawRoute// 允许从GetObserver访问Rounting API。 Get.routing// 检查 snackbar 是否打开 Get.isSnackbarOpen// 检…...

npm/yarn link 测试包时报错 Warning: Invalid hook call. Hooks can only be called ...
使用 dumi 开发 React 组件库时,为避免每次修改都发布到 npm,需要在本地的测试项目中使用 npm link 为组件库建立软连接,方便本地调试。 结果在本地测试项目使用 $ npm link 组件库 后,使用内部组件确报错: react.dev…...
「网页开发|前端开发|Vue」06 公共组件与嵌套路由:让每一个页面都平等地拥有导航栏
本文主要介绍在多个页面存在相同部分时,如何提取公共组件然后在多个页面中导入组件重复使用来减少重复代码。在这基础上介绍了通过嵌套路由的方式来避免页面较多或公共部分较多的情况下,避免不断手动导入公共组件的麻烦,并且加快页面跳转的速…...

leetcode687. 最长同值路径(java)
最长同值路径 题目描述DFS 深度遍历代码演示 题目描述 难度 - 中等 LC - 687. 最长同值路径 给定一个二叉树的 root ,返回 最长的路径的长度 ,这个路径中的 每个节点具有相同值 。 这条路径可以经过也可以不经过根节点。 两个节点之间的路径长度 由它们之…...
MySQL的常用术语
目录 1.关系 2.元组 3.属性 MySQL从小白到总裁完整教程目录:https://blog.csdn.net/weixin_67859959/article/details/129334507?spm1001.2014.3001.5502 1.关系 前面的博客有说到,MySQL是一款关系型数据库管理软件,一个关系就是 一张二维表(表) 我想大家都知道表格怎么…...
机器学习的特征工程
字典特征提取 def dict_demo():"""字典特征提取:return:"""data [{city: 北京, temperature: 100}, {city: 上海, temperature: 60}, {city: 深圳, temperature: 30}]# data [{city:[北京,上海,深圳]},{temperature:["100","6…...
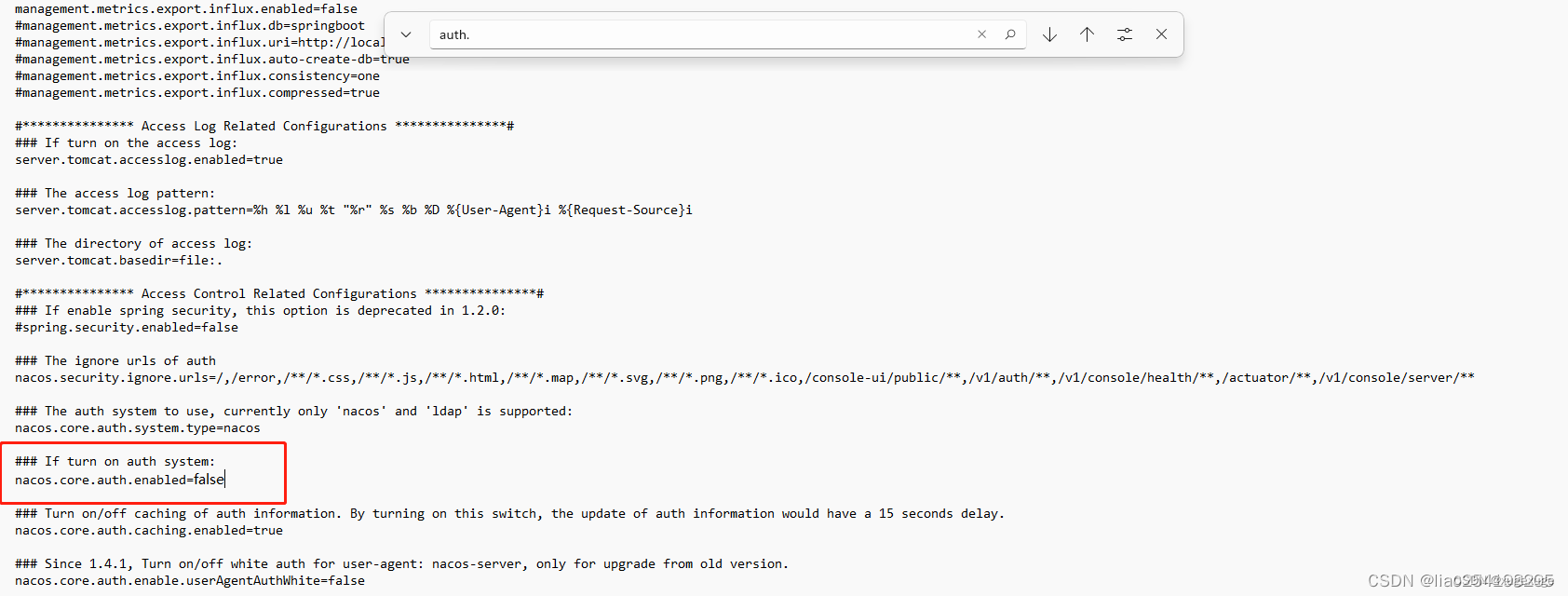
python3 修改nacos的yaml配置
一、安装nacos库 pip install nacos-sdk-python 二、代码如下 import nacos import yaml# 连接地址 NACOS_SERVER_ADDRESSES "192.168.xx.xx" NACOS_SERVER_PORT 替换为你的端口号,如8848# 命名空间 NACOS_NAMESPACE "your_namespace"# 账…...

YOLOv8 : 数据组织
1. 数据源 首先YOLOv8是支持目标分类、检测和目标分割。当前以应用最为广泛的目标检测为例,简单说明数据相关的信息。 一般情况下,建议将数据划分成images和labels,其中images存储图像,labels存储标签文件(YOLO格式)。如果是VOC数…...

golang如何生成zip压缩文件
在Golang中,您可以使用标准库中的compress/zip包来生成ZIP压缩文件。下面是一个简单的示例代码,演示如何使用该包来创建一个ZIP文件并将文件添加到其中: package main import ( "archive/zip" "bytes" "fmt&qu…...

AntDesign技术指南:构建优雅的前端界面
引言 AntDesign是一款优秀的前端UI组件库,它提供了丰富的组件和功能,帮助我们快速构建漂亮、易用的前端界面。本篇博客将详细介绍AntDesign的使用方法和技巧,并展示完整的代码示例。无论你是初学者还是有经验的开发者,本篇博客都…...

机器人任务挖掘与智能超级自动化技术解析
本文为上海财经大学教授、安徽财经大学学术副校长何贤杰出席“会计科技Acctech应对不确定性挑战”高峰论坛时的演讲内容整理。何贤杰详细介绍了机器人任务挖掘与智能超级自动化技术的发展背景、关键技术和应用场景。 从本质来说,会计是非常适合智能化、自动化的。会…...

C#通过ModbusTcp协议读写西门子PLC中的浮点数
一、Modbus TCP通信概述 MODBUS/TCP是简单的、中立厂商的用于管理和控制自动化设备的MODBUS系列通讯协议的派生产品,显而易见,它覆盖了使用TCP/IP协议的“Intranet”和“Internet”环境中MODBUS报文的用途。协议的最通用用途是为诸如PLC,I/…...

19-springcloud(中)
一 服务注册发现 1 什么是服务治理 为什么需要服务治理 在没有进行服务治理前,服务之间的通信是通过服务间直接相互调用来实现的。 过程: 武当派直接调用峨眉派和华山派,同样,华山派直接调用武当派和峨眉派。如果系统不复杂,这样…...
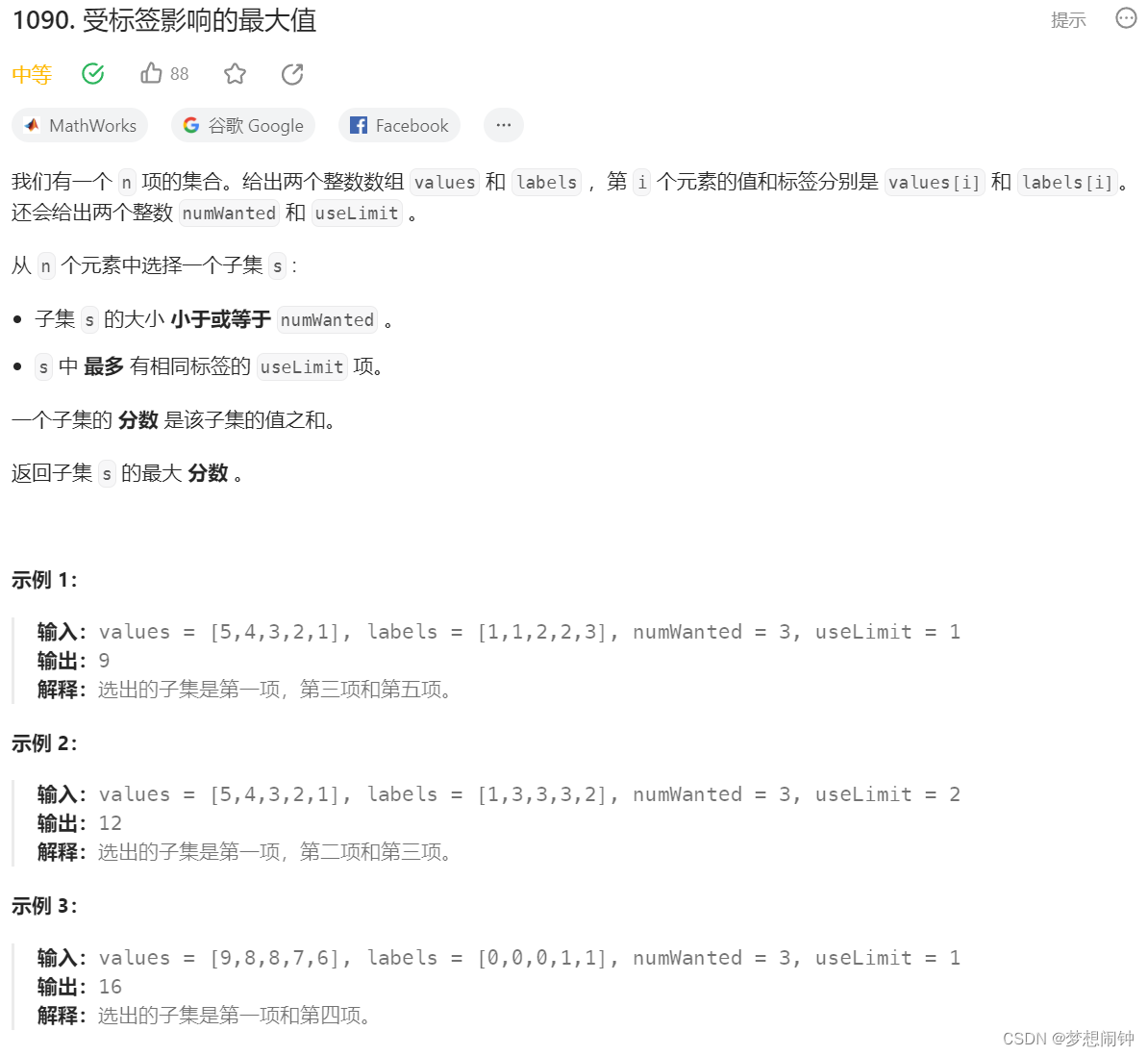
Leetcode1090. 受标签影响的最大值
思路:根据值从大到小排序,然后在加的时候判断是否达到标签上限即可,一开始想用字典做,但是题目说是集合却连续出现两个8,因此使用元组SortedList进行解决 class Solution:def largestValsFromLabels(self, values: li…...
第七章:敏捷开发工具方法-part2-CI/CD工具介绍
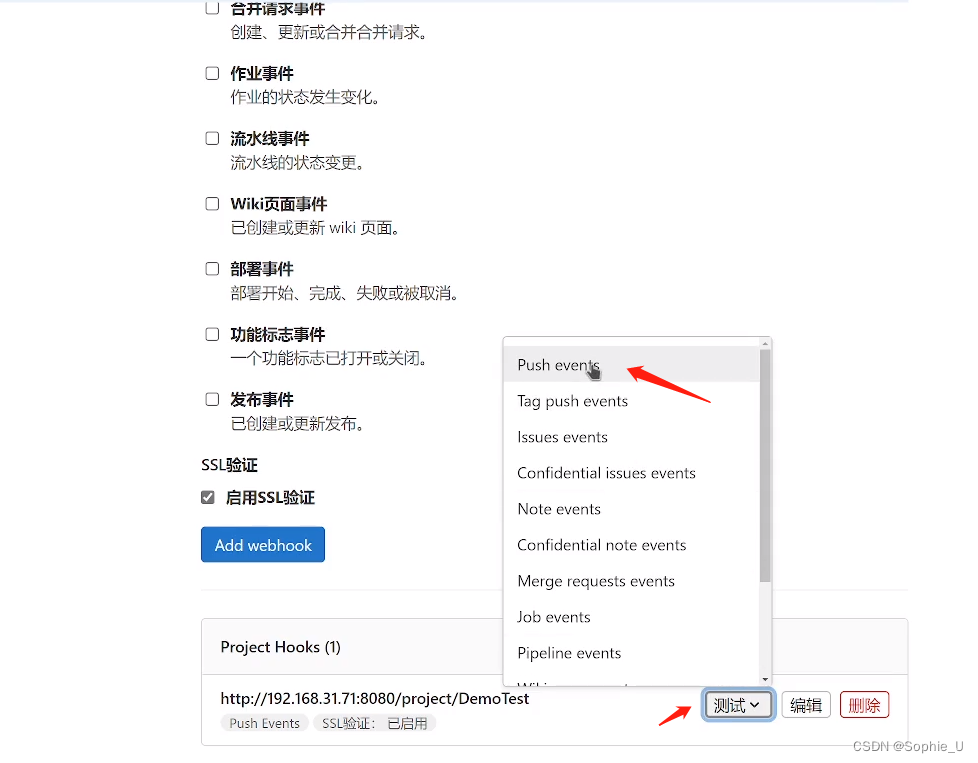
文章目录 前言一、CI-持续集成1.1 安装部署gitlab 二、gitlab CI配置三、jenkins实现CI / CD3.1 安装jenkins3.2 配置CI3.3 配置CD3.4 其他构建方式1、定时构建2、指定参数构建3、webhook自动根据git事件进行构建 前言 什么是CI/Cd? CI-Continuous integration&…...
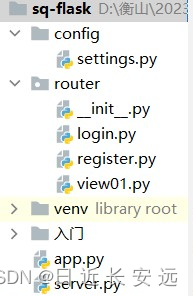
【自学开发之旅】Flask-回顾--对象拆分-蓝图(二)
url-统一资源定位符-不同的url对应不同的资源 作为服务端,url和视图函数的映射关系就是路由。 定义传递参数的方式: 1.创建动态url app.route("/login2/<username>/<passwd>") def login2(username, passwd):if username "…...

自动驾驶中间件
自动驾驶中间件 1. 什么是中间件2. 中间件的分类3. 自动驾驶为什么需要中间件4. 通信中间件 Reference: 自动驾驶中间件:量产落地的关键技术通俗易懂的告诉你什么是中间件 对于初入自动驾驶行业的人来说,各色各样的新型传感器、线控系统、芯…...
移植javacpp)
鲲鹏920(ARM64)移植javacpp
JavaCPP JavaCPP 使得Java 应用可以在高效的访问本地C++方法,JavaCPP底层使用了JNI技术,可以广泛的用在Java SE应用中(也包括安卓),以下两个特性是JavaCPP的关键,稍后咱们会用到: 提供一些注解,将Java代码映射为C++代码提供一个jar,用java -jar命令可以将C++代码转为…...

python打包exe实用版
pyinstaller模块用于将python项目打包成exe文件,以方便地在没有安装python环境的机器上运行。该模块使用 pip install pyinstaller 安装即可。 参数命令含义-Dpyinstaller -D demo.py默认选项。除了主程序demo.exe外,还会在在dist文件夹中生成很多依赖文…...

ArcSWAT建模踩坑记:你的土壤数据库参数算对了吗?聊聊SPAW的那些默认值和单位陷阱
ArcSWAT土壤参数校准实战:避开SPAW计算中的5个致命误区 当水文模拟结果与实测数据出现系统性偏差时,经验丰富的建模者会首先检查土壤参数——这个隐藏在界面背后的"沉默变量"往往是误差的最大来源。SPAW作为ArcSWAT推荐的土壤参数计算工具&…...

从零构建个人知识库:Go+React全栈项目RocketNotes实战解析
1. 项目概述:从零到一构建个人知识管理工具最近在整理个人笔记和代码片段时,发现了一个挺有意思的开源项目fynnfluegge/rocketnotes。乍一看这个名字,可能会联想到火箭(Rocket)和笔记(Notes)的结…...

避坑指南:Unity热重载插件内存占用高?可能是Windows Defender在搞鬼
Unity热重载性能优化:解决Windows Defender导致的资源占用问题 当你在Unity开发过程中频繁修改C#代码时,热重载(Hot Reload)功能无疑是提升效率的利器。它能让你在游戏运行状态下即时看到代码修改效果,避免反复重启带来的时间浪费。然而&…...

高效视频帧提取终极指南:为深度学习构建专业数据集
高效视频帧提取终极指南:为深度学习构建专业数据集 【免费下载链接】video2frame Yet another easy-to-use tool to extract frames from videos, for deep learning and computer vision. 项目地址: https://gitcode.com/gh_mirrors/vi/video2frame 在计算机…...
)
【限时公开】后印象派专属--ar 16:9 --style raw --stylize 800参数组合包(含塞尚构图/修拉点彩/劳特累克动态线共12套已验证prompt模板)
更多请点击: https://intelliparadigm.com 第一章:后印象派艺术精神与Midjourney风格迁移的本质逻辑 后印象派并非对印象派的简单延续,而是对主观表达、结构重构与象征张力的自觉回归——梵高旋转的星云、塞尚凝练的几何体、高更原始的色域&…...

从TPM到机密计算:远程证明技术原理与zap1项目实践指南
1. 项目概述与核心价值最近在整理一些零散的学习笔记时,发现了一个挺有意思的项目,叫Frontier-Compute/zap1-learning-attestation。乍一看这个标题,可能有点让人摸不着头脑,尤其是对于刚接触可信计算或者硬件安全领域的朋友来说。…...

Kubernetes自动化更新利器Keel:实现容器镜像的持续部署
1. 项目概述:为什么我们需要一个“自动化的应用更新管家”? 如果你和我一样,负责维护着几个、十几个,甚至几十个运行在Kubernetes或Docker环境中的应用,那你一定对“更新”这件事又爱又恨。爱的是,新版本意…...

Iris API错误处理机制与嵌入式系统优化实践
1. Iris API错误处理机制解析在嵌入式系统开发中,API的健壮性直接影响整个系统的稳定性。Iris框架作为ARM架构下的核心组件,其错误处理机制基于JSON-RPC 2.0规范进行了深度定制,特别适合资源受限的嵌入式环境。与通用Web API不同,…...

Cursor编辑器性能优化:精准重置缓存与进程的开发者效率工具
1. 项目概述:一个被低估的开发者效率工具如果你是一名开发者,尤其是深度使用 Cursor 这类 AI 驱动的代码编辑器,那么你一定遇到过这样的场景:编辑器突然变得卡顿、代码补全失灵、AI 建议变得驴唇不对马嘴,或者插件行为…...

基于GitHub Actions的自动化代码质量守护:CodeBuddy实战指南
1. 项目概述与核心价值最近在和一些团队做代码评审和协作时,我经常遇到一个痛点:大家写的代码风格各异,注释要么缺失要么过时,一些潜在的安全漏洞和性能问题在提交前很难被系统性地发现。虽然市面上有各种静态分析工具,…...