基于视觉重定位的室内AR导航项目思路(2):改进的建图和定位分离的项目思路
文章目录
- 一、建图
- 二、定位
- 首先是第一种方法:几何方法
- 其次是第二种方法:图像检索方法
- 最后是第三种方法:深度学习方法
前情提要:
是第一次做项目的小白,文章内的资料介绍如有错误,请多包含!
一、建图
不知道在线建图是否有其他方法,但是我只尝试过使用ORB-SLAM3进行在线建图,这或许是一个可以再进行思考的要点。
可以采用以下两种想法进行建图:
1、在电脑端运行ORB-SLAM3实时调用手机摄像头或是其他摄像头进行在线建图;
2、在电脑端运行ORB-SLAM3使用图像数据集进行离线建图。
不过,考虑到我需要地图的目的后,在线建图和离线建图的区别被模糊了,我只需要一份可以用于定位导航的点云地图即可,它是通过在线建图还是离线建图完成的,我并不在乎。
对于我需要完成的室内导航目的来说,在线建图和离线建图无甚差别。
进而在了解完R TALK | 旷视研究院SLAM组负责人刘骁:三维视觉与机器人这篇文章后,我了解到了一个新的名词Visual Localization,即视觉定位。
在旷视的这篇文章中,图片中关于构建稀疏点云地图使用的技术是SFM技术,Structure from Motion,而在文字描述的部分使用构建技术是SLAM技术。
这个部分让我产生了疑惑,通过其他文章的了解,我得知:
1、SFM更适用于大规模场景下的点云地图构建,ORB-SLAM3适用场景规模较小;
2、SFM可以使用无序的数据集进行三维重建,ORB-SLAM3需要使用有序的数据集进行点云地图构建。
如果考虑到我打算做的医院室内导航,毫无疑问,SFM技术构建的点云地图是更合适的。
但是新的疑惑又产生了,SFM三维重建的场景地图,会比ORB-SLAM3的稀疏点云地图更适合导航使用吗?
想请教下各位,怎么理解三维重建中SFM和MVS的关系?
SFM同样也可以构建稀疏点云地图,只是可以进一步构建为稠密点云地图,基于视觉高精定位的“室内AR导航”技术点解析,商汤科技的这篇文章介绍的导航应用的地图就是稠密点云地图,而后使用几何方法,直接根据相机输入的图像进行2D-3D的特征点匹配。
就我目前的想法来看,我并不赞同这种使用稠密点云地图做法(可能是因为我并不了解稠密电点云地图特征点匹配这一部分的内容,他们或许有别的考量):
首先是稠密点云地图存储时占用的存储空间就远大于稀疏点云地图;
其次是,要在这么大规模的点云地图内搜索当前图像所对应的特征点,计算难度相当大,
手机端的运算资源是有限的。
我是该布置在设备端还是云端?手机端真的能使用这种方案吗?
我对此持疑惑质疑态度。
所以,我打算将导航上使用的地图确定为稀疏点云地图,毕竟在选择完目的地、确定完当前位置后,总归是要根据地图使用路线规划算法生成路线的,因此点云地图是必要的,这是可以确定的内容。
建图部分的细节讨论(这部分若是没有超链接,说明还没写好)
二、定位
如果要实现导航功能,地图是必不可少的,但是还需要知道用户当前的位置才有可能根据目的地的选择,才能进一步通过路径规划算法给出可行的路线方案,才能接着做导航。
阅读完基于单目相机的视觉重定位方法综述这篇文章后,其将相机重定位方法分为三种:
1、几何方法;
2、图像检索方法;
3、深度学习方法;
三种方法是依次发展的。
首先是第一种方法:几何方法
基于视觉高精定位的“室内AR导航”技术点解析,例如在这篇文章中,商汤科技的方案是:根据已经构建好的稀疏点云地图,以相机拍摄图像为输入,提取图像特征后直接进行与点云地图2D-3D的对应关系,而后获得当前的位姿数据。

如果只是简单地基于点云地图进行直接视觉特征点匹配,也就是通过估计当前观测到的图像的二维特征点和3D 场景模型中的空间点之间的刚性几何对应关系,不仅具有在不同场景下的适应性不足的还有计算量较大的问题。
但是其还有其他可以改进的方式,例如地图分为三类:几何建图(Geometric Mapping),语义建图(Semantic Mapping)和广义建图(General Mapping)
几何建图主要关注场景中物体的形状、位置和空间关系,以生成精确的几何模型。
语义建图的地图不仅包含几何结构,还能提供关于物体类别、属性和语义关系等信息,语义地图可以通过对点云地图进行语义分割等工作得到;
广义建图是一个更综合的概念,它结合了几何建图和语义建图的思想,并进一步考虑其他方面的信息,如时间、光照、温度等。广义建图的目标是创建一个综合的地图,包括几何、语义以及其他环境属性的信息,以更全面地描述和理解环境。
地图方面的改进或许是一个可以探索的领域(这部分若是没有超链接,说明还没写好)。
其次是第二种方法:图像检索方法
因此可以考虑构建图像数据库,通过在图像数据库之中检索当前相机拍摄图像的全局描述子来确定当前的位姿。
检索方法构建图像数据库,可以通过词袋模型或是颜色直方图构建其匹配的全局特征:
词袋模型通过提取局部特征构建视觉词汇表,将局部特征与总体图像形成的视觉词汇表做比较,得全局特征向量,因此可以用作全局特征。
颜色直方图,做比较的为RGB或是HSV空间,本身就具有一定的全局性,图像提取出来的每个颜色区间的像素数量就可以作为全局的特征。
当通过全局特征进行粗定位得到相似的关键帧后,对比局部特征可以得到更精确的定位,通过图像的位姿得到当前位置的位姿,但是因为图像不可能覆盖每一个位置,所以位姿存在误差。
目前比较倾向的方法的是将图像检索方法,但在R TALK | 旷视研究院SLAM组负责人刘骁:三维视觉与机器人这篇文章介绍的研究中,其在粗定位后,接的是2D-3D的几何定位,和几何方法还有图像检索方法都有所不同,但我认为这是可行的方案,起码在理论层面上可行,是接下去尝试的主要地方。

最后是第三种方法:深度学习方法
深度学习方法构建神经网络模型,暂时还不是很了解,需要对深度学习了解之后才能总结,不甚了解,不做讨论
未完待续。
如果你觉得这篇文章写的不错,多多点赞~收藏吧!
相关文章:
基于视觉重定位的室内AR导航项目思路(2):改进的建图和定位分离的项目思路
文章目录 一、建图二、定位首先是第一种方法:几何方法其次是第二种方法:图像检索方法最后是第三种方法:深度学习方法 前情提要: 是第一次做项目的小白,文章内的资料介绍如有错误,请多包含! 一、…...

nodejs+vue+elementui精品课程网站设计
前端技术:nodejsvueelementui基于nodejs语言、vue.js框架、B/S架构、Mysql数据库设计并实现了精品课程网站设计。系统主要包括首页、个人中心、用户管理、课程信息管理、课程分类管理、学习论坛、在线试题管理、试题管理、系统管理、考试管理等功能模块。 本文首先介…...

40个Linux常用命令组合
1.删除0字节文件 find -type f -size 0 -exec rm -rf {} \; 2.查看进程 按内存从大到小排列 ps -e -o "%C : %p : %z : %a"|sort -k5 -nr 3.按cpu利用率从大到小排列 ps -e -o "%C : %p : %z : %a"|sort -nr 4.打印说cache里的URL grep -r -a jpg …...

NIFI关于Variables的使用
说明 NIFI中的变量(variables)和参数(parameters)在引用的时候是有区别的。 参数的引用是使用#{参数名}的形式。 变量是使用${变量名}的形式来引用。 nifi版本:1.23.2(docker镜像) Variable…...

2、VRP基础
本节我们介绍华为设备的VRP系统平台的一些基本知识,为以后学习路由交换的配置命令做好基本的准备。在这里,为软考网络工程师做准备,只需要了解其中比较基础的即可,包括VRP是什么、提供了哪些用户界面、VRP的用户级别、基本的配置视…...
docker容器运行成功但无法访问,原因分析及对应解决方案(最新,以Tomcat为例,亲测有效)
原因分析: 是否能访问当运行docker容器虚拟机(主机)地址 虚拟机对应的端口号是否开启或者防墙是否关闭 端口映射是否正确(这个是我遇到的) tomcat下载的是最新版,docker运行后里面是没有东西的&am…...

第15章 秒杀商品隔离解决方案
mini商城第15章 秒杀商品隔离解决方案 一、课题 商品秒杀-热门数据实时收集 二、回顾 1、掌握热门分析收集方案 2、Lua高级语法 3、Kafka使用 4、Lua垂直日志收集 5、Apache Druid大数据实时处理系统 三、目标 1、MyBatis查询Apache Druid 常规查询 复杂查询 2、热门…...

2023-08-31力扣每日一题-姜汁水题
链接: 1761. 一个图中连通三元组的最小度数 题意: 选择两两相连的三个点,要求度最小 解: 什么暴力hard 实际代码: #include<bits/stdc.h> using namespace std; int minTrioDegree(int n, vector<vect…...
五大优化技巧,让你的视频直播app源码更加流畅
优化技巧一:性能调优 视频直播app源码在确保流畅体验方面是至关重要的。为了提升性能,以下是几项关键的优化技巧: 使用轻量级编码器和解码器:选择高效的编码器和解码器,以减少资源占用,并确保视频流畅播放…...

Weblogic10中常用Linux指令
一.Weblogic 创建域 域目录/servers/AdminServer 路径下 以weblogic帐号登录(与创建域目录相对应账户) cd /home/weblogic/bea/weblogic92/common/bin 执行./config.sh进入配置界面。配置步骤如下: 1.Choose between creating and exten…...
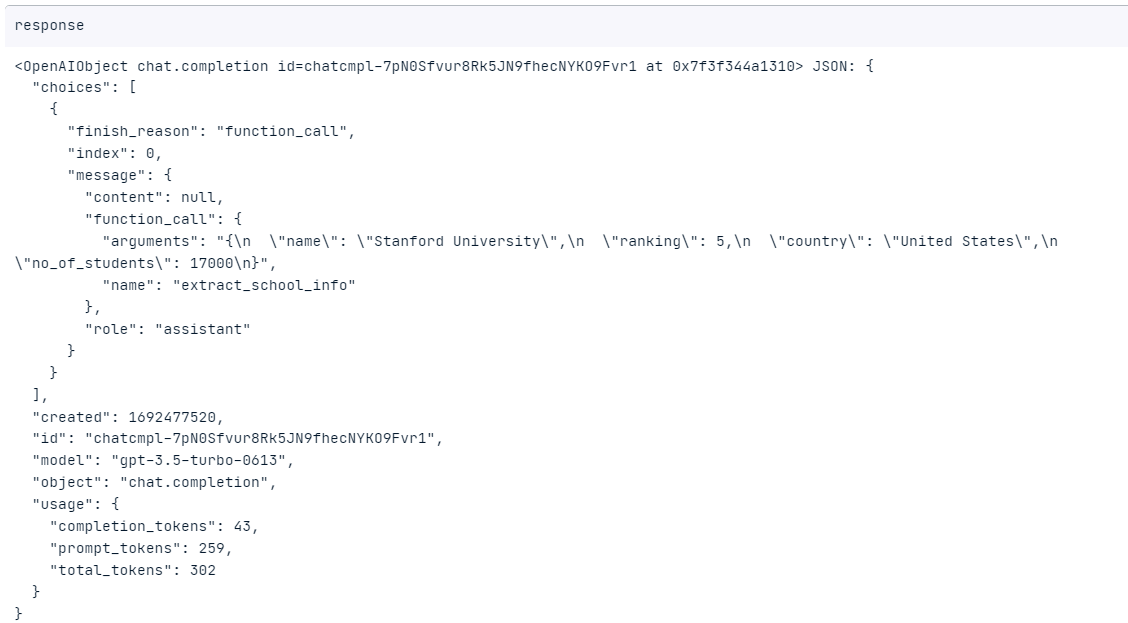
OpenAI 函数调用教程
推荐:使用 NSDT场景编辑器 快速搭建3D应用场景 什么是OpenAI函数调用? OpenAI API 非常擅长以系统的方式生成响应。只需几行代码即可管理提示、优化模型输出以及执行、生成和语言应用程序。 即使有这么多好东西,OpenAI API对开发人员和工程…...
Spark有两种常见的提交方式:client 模式和 cluster 模式对机器 CPU 的影响
Spark有两种常见的提交方式:client 模式和 cluster 模式。这两种方式对机器 CPU 的影响略有不同 ,请参考以下说明 Client 模式: 在 Client 模式下,Spark Driver 运行在提交任务的客户端节点上(即运行 spark-submit 命…...
HarmonyOS/OpenHarmony(Stage模型)应用开发单一手势(三)
五、旋转手势(RotationGesture) RotationGesture(value?:{fingers?:number; angle?:number}) 旋转手势用于触发旋转手势事件,触发旋转手势的最少手指数量为2指,最大为5指,最小改变度数为1度,拥有两个可…...

Git的安装以及基础使用方法
Git是一种分布式版本控制系统,被广泛用于管理代码、文档和任何其他类型的数据。它允许开发者在团队中协作,并且在处理大型项目时可以保持代码的完整性。 这里写目录标题 一、安装和设置二、基本的Git命令三、分支和合并四、标签和远程仓库 一、安装和设置…...
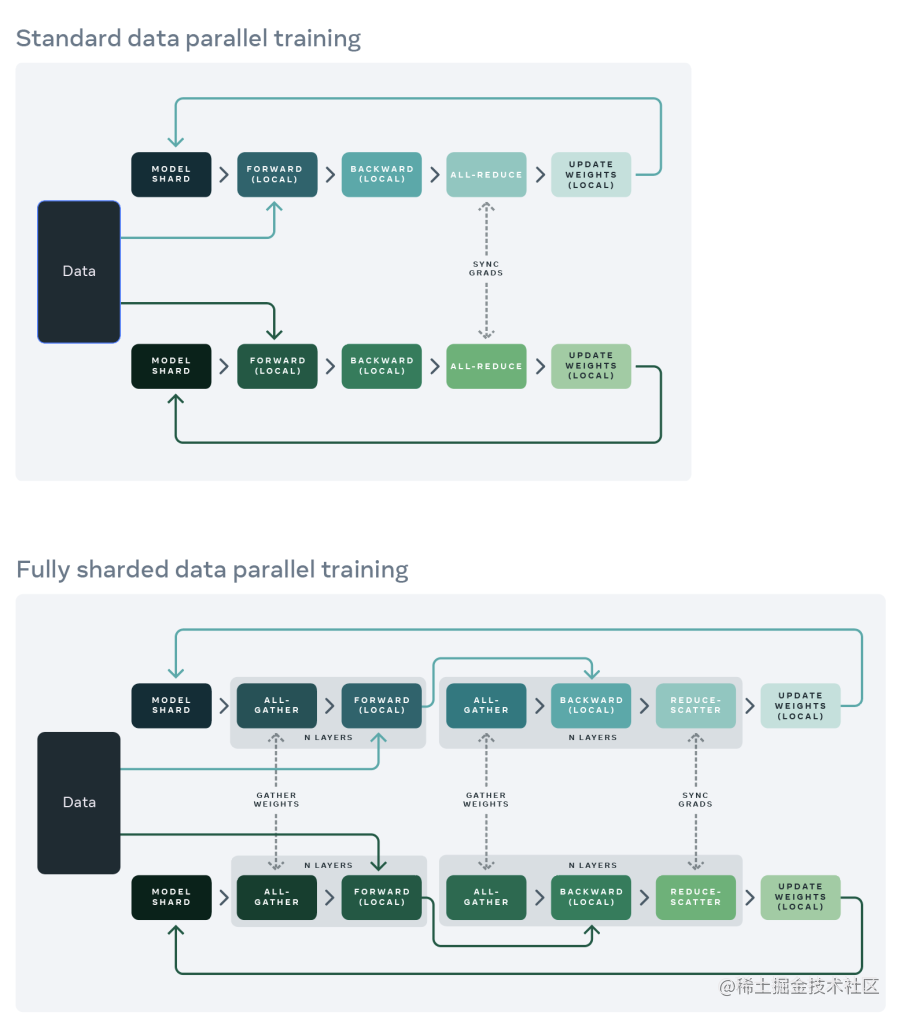
用通俗易懂的方式讲解大模型分布式训练并行技术:数据并行
近年来,随着Transformer、MOE架构的提出,使得深度学习模型轻松突破上万亿规模参数,传统的单机单卡模式已经无法满足超大模型进行训练的要求。因此,我们需要基于单机多卡、甚至是多机多卡进行分布式大模型的训练。 而利用AI集群&a…...
Shopify电子邮件营销方法?邮件营销的技巧?
Shopify电子邮件营销怎么操作?独立站如何做邮件营销? Shopify电子邮件营销是一种强大的工具,可帮助电商企业与其客户建立联系并提高销售。蜂邮EDM将探讨一些有效的Shopify电子邮件营销方法,以帮助您最大限度地利用这一策略。 Shopify电子邮…...

SpringCloud 初识
简单理解就是有微服务(一个平台下很多小的功能模块分开开发)的才需要springcloud来管理 Spring Cloud是一个开源的轻量级框架,用于构建分布式系统和微服务架构。它提供了一系列的工具和框架,使得开发者可以更加方便地搭建、管理和…...
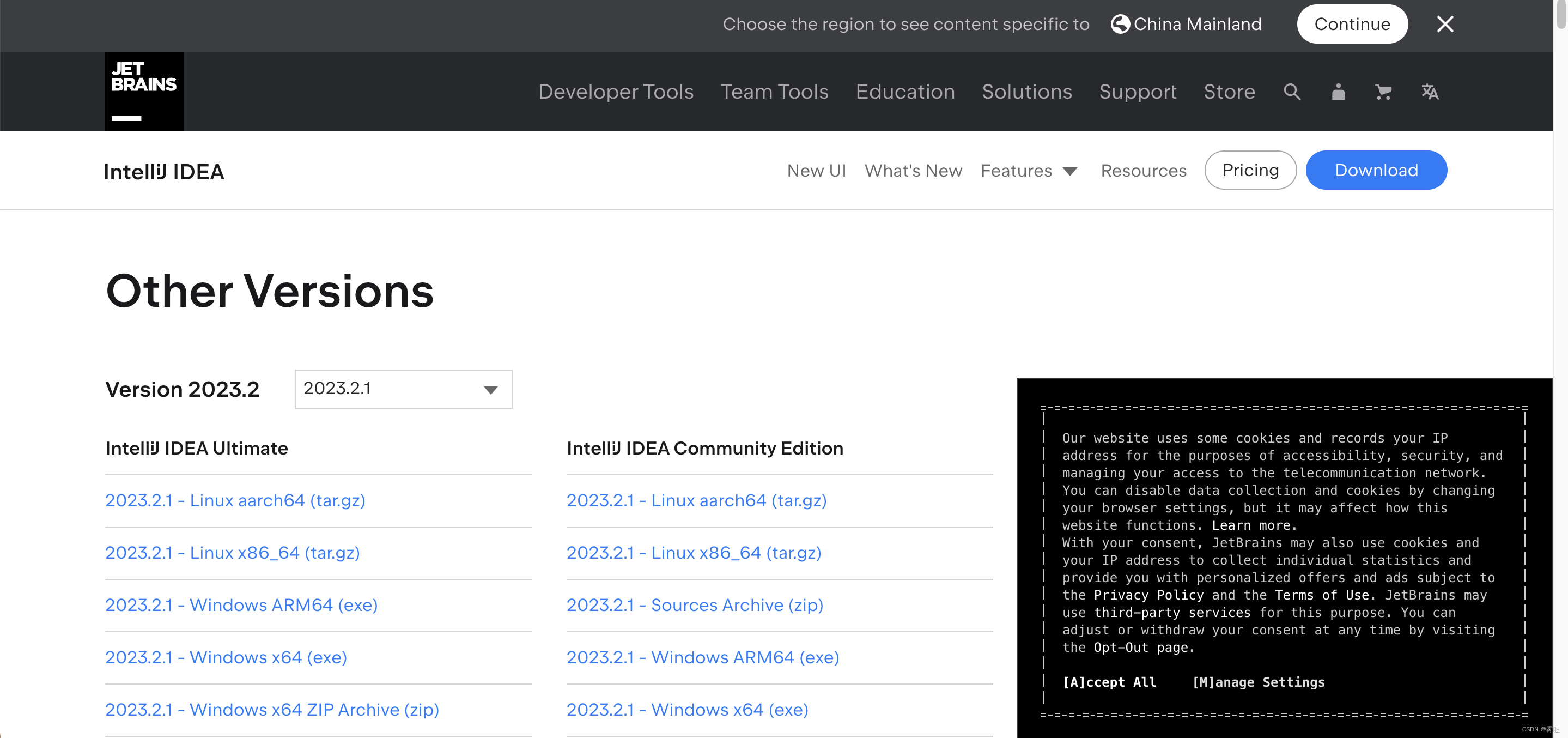
idea所有历史版本下载
目录 链接直达 图文讲解 我idea嘎了,最新版的一直在闪退,于是我就在网上找idea的历史版本下载,结果都不太如意。 链接直达 idea历史版本 图文讲解 来到idea下载的官网 Download IntelliJ IDEA – The Leading Java and Kotlin IDE 一直…...
Android笔记(二十八):在雷电模拟器安卓7.0+上使用Charles抓包详细教程
背景 由于手头没有合适的真机,所有经常使用雷神模拟器来跑项目,模拟器也需要能够抓包看看接口返回的数据,以便自测调试。本文记录了如何在雷电模拟器安卓7.0上使用Charles抓包,其他模拟器没试过。 最终效果 浏览器打开百度网页…...
Python之数值和内建函数
Python之数值和内建函数 内建常用数据类型 分类 数值型 int、float、complex、bool 序列sequence 字符串str、字节序列bytes、bytearray列表list、元组tuple 键值对 集合set、字典dict 取整 取整 int // round math.floor math.ceil说明:两条//斜杠是整除&…...

AI Agent产品经理的新思维:从功能设计到AI原生产品的方法论转型
AI Agent产品经理的新思维:从功能设计到AI原生产品的方法论转型 各位产品同行、AI从业者,大家好!我是连续3年深耕AI工具Agent产品、从C端信息流(今日头条/抖音生态)PM成功转型AI原生垂直工具PM的张小白——过去两年&am…...

云端生信分析:从零部署RStudio Server避坑指南
1. 为什么需要云端RStudio Server? 做生物信息分析的朋友们肯定深有体会,单细胞测序、转录组这些数据动辄几十GB,用自己电脑跑分析简直是折磨。我去年处理一个肝癌单细胞项目时,光是读取数据就卡了半小时,更别说后续的…...

Nexus:RAG 时代终结?编译器 AI 知识层来了
最近 Pinecone 发布了一个新东西:**Nexus。**最早我是在抖音上看到的,说实话,这种标题挺吓人的,低劣但有效,我都忍不住要点进去: RAG 时代终结了。向量数据库不够用了。Agent 需要 Knowledge Engine。因为…...

CircuitPython HID设备模拟:从键盘鼠标到数据记录实战指南
1. 项目概述:从微控制器到智能交互设备在嵌入式开发的世界里,让一块小小的开发板“假装”成键盘或鼠标,直接控制你的电脑,这听起来像是极客的魔法,但其实是基于一个非常成熟且标准化的协议:HID。HID&#x…...
)
用STM32F103C8T6和HC-05蓝牙模块,从零DIY一辆蓝牙遥控小车(附完整代码与MIT App Inventor教程)
从零打造STM32蓝牙遥控小车:硬件配置到APP开发全指南 项目背景与核心价值 对于嵌入式开发初学者来说,理论知识和实际项目之间往往存在一道难以跨越的鸿沟。而一个完整的硬件项目实践,恰恰是填补这一空白的最佳方式。基于STM32F103C8T6和HC-05…...

电气设备、工业炉行业企业官网模板资源整理
做工业类企业网站的开发和设计时,很多人都会遇到一个痛点:行业适配的官网模板太少,要么风格老旧,要么和电气设备、工业炉这类硬核行业的调性不符,从零开发又耗时耗力。 今天就结合自己的建站经验,给大家整…...

ORTC与AI融合:构建下一代智能实时音视频通信系统
1. 项目概述:当实时通信遇上人工智能最近几年,我一直在实时音视频(RTC)领域摸爬滚打,从早期的WebRTC到各种私有协议,技术栈换了一茬又一茬。但有一个趋势越来越明显:单纯的“能通”已经不够了&a…...

demo-magic常见问题解决:pv工具安装和终端兼容性完全指南
demo-magic常见问题解决:pv工具安装和终端兼容性完全指南 【免费下载链接】demo-magic A handy shell script that enables you to write repeatable demos in a bash environment. 项目地址: https://gitcode.com/gh_mirrors/de/demo-magic demo-magic是一个…...

独立开发者如何利用TaotokenTokenPlan降低项目试错成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者如何利用Taotoken TokenPlan降低项目试错成本 对于独立开发者或小型团队而言,启动一个涉及大模型能力的项目…...
:含12类建筑/机械/游戏资产等距规范库,仅限前500名开发者领取)
【稀缺首发】Midjourney等距视角工业设计协议(ISO/IEC 21827-2024兼容版):含12类建筑/机械/游戏资产等距规范库,仅限前500名开发者领取
更多请点击: https://intelliparadigm.com 第一章:等距视角工业设计协议的范式演进与ISO/IEC 21827-2024兼容性解析 等距视角工业设计协议(Isometric Industrial Design Protocol, IIDP)已从早期的CAD渲染辅助规范,逐…...