1.5 空间中的平面与直线
空间中的平面和直线
知识点1 平面方程
1.平面的法向量与法式
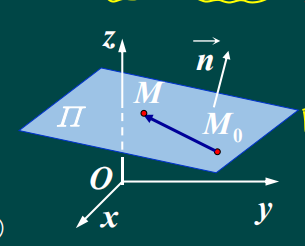
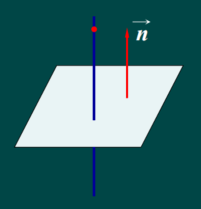
定义1 若向量n 垂直与平面N,则称向量n为平面N的法向量。
设一平面通过一直点 M 0 ( x 0 , y 0 , z 0 ) M_0(x_0,y_0,z_0) M0(x0,y0,z0)求垂直于非零向量 n ⃗ \vec{n} n= (A,B,C),求改平面N的方程。
任意点 M ( x , y , z ) ∈ N M(x,y,z) \in N M(x,y,z)∈N,则有 M 0 M ⃗ ⊥ n ⃗ \vec{M_0M} \bot \vec{n} M0M⊥n 故 M 0 M ⃗ . n ⃗ = 0 \vec{M_0M}.\vec{n}=0 M0M.n=0(两向量垂直相乘为:0)
↓ M 0 M ⃗ = ( x − x 0 , y − y 0 , z − z 0 ) \downarrow \qquad \vec{M_0M}=(x-x_0,y-y_0,z-z_0) ↓M0M=(x−x0,y−y0,z−z0)
A ( x − x 0 ) + B ( y − y o ) + C ( z − z 0 ) = 0 A(x-x_0)+B(y-y_o)+C(z-z_0) = 0 A(x−x0)+B(y−yo)+C(z−z0)=0 ①
称 ① 式为平面N的点法式方程。
例1 求过三点 M 1 ( 2 , 3 , 2 ) , M 2 ( 3 , 3 , 3 ) , M 3 ( 4 , 5 , 5 ) M_1(2,3,2),M_2(3,3,3),M_3(4,5,5) M1(2,3,2),M2(3,3,3),M3(4,5,5) 的平面N的方程。
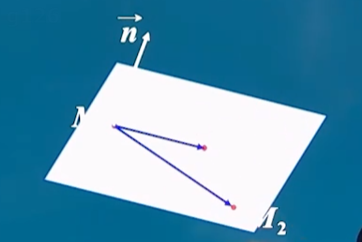
解: 取该平面N的法向量为:
n ⃗ = M 1 M 2 ⃗ ∗ M 1 M 3 ⃗ \vec{n}= \vec{M_1M_2} * \vec{M1M3} n=M1M2∗M1M3
又 M 1 ∈ N M_1\in N M1∈N,利用点法式的平面N的方程
14 ( x − 2 ) + 9 ( y + 1 ) − ( z − 4 ) = 0 14(x-2)+9(y+1)-(z-4)=0 14(x−2)+9(y+1)−(z−4)=0
即 14 x + 9 y − z − 15 = 0 14x+9y-z-15=0 14x+9y−z−15=0
2.平面的一般是方程
定义2 设有三元一次方程
A x + B y + C z + D = 0 ( A 2 + B 2 + C 2 ≠ 0 ) ② Ax+By+Cz+D=0 (A^2+B^2+C^2 \neq 0) ② Ax+By+Cz+D=0(A2+B2+C2=0)②
任取一组满足上述方程的数 x 0 , y 0 , z 0 x_0,y_0,z_0 x0,y0,z0,则:
A x 0 + B y 0 + C z 0 + D = 0 Ax_0+By_0+Cz_0+D=0 Ax0+By0+Cz0+D=0
以上两式相减,得平面的点法式方程
A ( x − x 0 ) + B ( y − y 0 ) + C ( z − z 0 ) = 0 A(x-x_0)+B(y-y_0)+C(z-z_0)=0 A(x−x0)+B(y−y0)+C(z−z0)=0
显然方程 ② 与此点法式方程等价,因此方程 ② 的图形是法向量为 n ⃗ = ( A , B , C ) \vec{n}=(A,B,C) n=(A,B,C)的平面,此方程为平行的一般式方程。
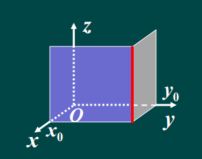
3.特殊位置的平面及方程
-
A x + B y + C z = 0表示通过原点的平面;
-
B y+C z+D = 0表示平行于 x 轴的平面;
-
A x+C z+D = 0表示平行于 y 轴的平面;
-
A x+B y+D = 0表示平行于 z 轴的平面;
-
A x + D = 0表示垂直于 x 轴的平面或平行于 Oyz 平面的平面;
-
B y + D = 0表示垂直于 y 轴的平面或平行于 Ozx 平面的平面;
-
C z + D = 0表示垂直于 z 轴的平面或平行于 Oxy 平面的平面。
-
B y +C z= 0表示通过 x 轴的平面;
-
A x+C z= 0表示通过 y 轴的平面;
-
A x+B y= 0表示通过 z 轴的平面。
例2 求过 z 轴和点 M ( 6 , 8 , 9 ) M(6,8,9) M(6,8,9)的平面 ∏ \prod ∏ 的方程。
解:由题可设平面 ∏ \prod ∏ 的方程为 A x+B y= 0。因为平面过点 M,所以 6 A + 8 B = 0 6A+8B=0 6A+8B=0,解得 A = − 4 3 B A=-\frac{4}{3}B A=−34B 。因此,平面 ∏ \prod ∏ 的方程是 − 4 3 x + y B = 0 {-\frac{4}{3}x+y}B=0 −34x+yB=0,即 (因 B ≠ \neq = 0 )。
4.平面的截距式方程
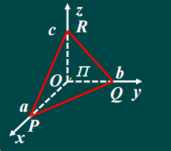
定义3 设平面的 ∏ \prod ∏与x,y,z轴分别交于P(a,0,0),Q(0,b,0),R(0,0,c)三点,则 ∏ \prod ∏的方程为
(a,b,c ≠ \neq = 0 ) x a + y b + z c = 1 \frac{x}{a}+\frac{y}{b}+\frac{z}{c}=1 ax+by+cz=1 ③
称 ③ 式为平面 的截距式方程。
其中a,b,c分别称为平面 在x,y,z轴上的截距。
注:某平面具有截距式方程的充分必要条件:平面在三条坐标轴上的截距
均为非零常数。
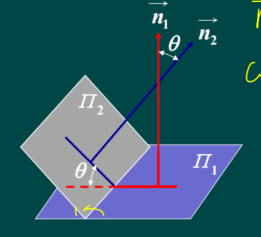
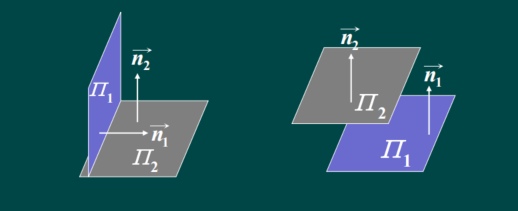
5.两个平面的夹角
定义2 两平面 ∏ 1 , ∏ 2 \prod_1,\prod_2 ∏1,∏2的法线向量 的夹角 θ \theta θ(取锐角或直角)
称为这两个平面的夹角。
设平面 ∏ 1 \prod_1 ∏1的法向量为 n 1 ⃗ = ( A 1 , B 1 , C 1 ) \vec{n_1}=(A_1,B_1,C_1) n1=(A1,B1,C1)
设平面 ∏ 2 \prod_2 ∏2的法向量为 n 2 ⃗ = ( A 2 , B 2 , C 2 ) \vec{n_2}=(A_2,B_2,C_2) n2=(A2,B2,C2)
则两平面夹角 θ \theta θ的余弦为:
c o s θ = ∣ n 1 ⃗ . n 2 ⃗ ∣ ∣ n 1 ⃗ ∣ . ∣ n 2 ⃗ ∣ cos\theta=\frac{|\vec{n_1}.\vec{n_2}|}{|\vec{n_1}|.|\vec{n_2}|} cosθ=∣n1∣.∣n2∣∣n1.n2∣ 即
c o s θ = ∣ A 1 A 2 + B 1 B 2 + C 1 C 2 ∣ ∣ A 1 2 + B 1 2 + C 1 2 . A 2 2 + B 2 2 + C 2 2 ∣ cos\theta=\frac{|A_1A_2+B_1B_2+C_1C_2|}{|\sqrt{A_1^2+B_1^2+C_1^2}.\sqrt{A_2^2+B_2^2+C_2^2}|} cosθ=∣A12+B12+C12.A22+B22+C22∣∣A1A2+B1B2+C1C2∣
两个平面的夹角
( 1 ) ∏ 1 ⊥ ∏ 2 (1) \prod_1\bot\prod_2 (1)∏1⊥∏2 => n 1 ⃗ ⊥ n 2 ⃗ \vec{n_1}\bot\vec{n_2} n1⊥n2 =>$ A_1A_2+B_1B_2+C_1C_2=0$
( 2 ) ∏ 1 / / ∏ 2 (2) \prod_1//\prod_2 (2)∏1//∏2 => n 1 ⃗ / / n 2 ⃗ \vec{n_1}//\vec{n_2} n1//n2 => A 1 A 2 = B 1 B 2 = C 1 C 2 \frac{A_1}{A_2}=\frac{B_1}{B_2}=\frac{C_1}{C_2} A2A1=B2B1=C2C1
已知1平面 x + 2 y − z − 2 = 0 x+2y-z-2=0 x+2y−z−2=0和2平面 z x + y + z − 19 = 0 zx+y+z-19=0 zx+y+z−19=0 ,求这两个平面的夹角。
可得两个平面的法向量 $n_1 = 1,2,−1 , n_2 = 2,1,1 $
可得夹角的余弦 c o s θ = 3 6 . 6 = 1 2 cos\theta = \frac{3}{\sqrt{6}.\sqrt{6}}=\frac{1}{2} cosθ=6.63=21
这两个平面的夹角为 θ = π 6 \theta = \frac{\pi}{6} θ=6π
例4 设平面 ∏ \prod ∏垂直于平面 2 x + 3 y + 2 z = 0 2x+3y+2z=0 2x+3y+2z=0且过两点 M 1 ( 3 , 3 , 3 ) M_1(3,3,3) M1(3,3,3)和 M 2 ( 4 , 5 , 5 ) M_2(4,5,5) M2(4,5,5),求平面 ∏ \prod ∏方程。
解:已知平面的方程的法向量为 n 1 = ( 2 , 3 , 2 ) n_1= (2,3,2) n1=(2,3,2)
又有 M 1 M 2 = ( 1 , 2 , 2 ) M_1M_2=(1,2,2) M1M2=(1,2,2) 在所求的平面上,则所求平面的法向量n同时垂直于向量 M 1 M 2 M_1M_2 M1M2 及 n 1 n_1 n1 ,因此可取平面 ∏ \prod ∏的法向量为
n ⃗ = n 1 ∗ M 1 M 2 = [ i ⃗ j ⃗ k ⃗ 2 3 2 1 2 2 ] = ( 2 , − 2 , 1 ) \vec{n}=n_1* M_1M_2= \left[ \begin{array}{c|c|c} \vec{i} & \vec{j} & \vec{k} \\ 2 & 3 & 2 \\ 1 & 2 & 2 \end{array} \right] = (2,-2,1) n=n1∗M1M2= i21j32k22 =(2,−2,1)
故所求平面的方程为 2 ( x − 3 ) − 2 ( y − 3 ) + ( z − 3 ) = 0 2(x-3)-2(y-3)+(z-3)=0 2(x−3)−2(y−3)+(z−3)=0
即 2 x − 2 y + z − 3 = 0 2x-2y+z-3=0 2x−2y+z−3=0
6.点到平面的距离公式
设 M 0 ( x 0 , y 0 , z 0 ) M_0(x_0,y_0,z_0) M0(x0,y0,z0)是平面Ax+By+Cz+D=0外的一点,则点 M 0 M_0 M0到平面的距离为
d = ∣ A x 0 + B y 0 + C z 0 + D ∣ A 2 + B 2 + C 2 d=\frac{|Ax_0+By_0+Cz_0+D|}{\sqrt{A^2+B^2+C^2}} d=A2+B2+C2∣Ax0+By0+Cz0+D∣
设平面法向量为 n ⃗ = ( A , B , C ) \vec{n}=(A,B,C) n=(A,B,C)令 M 0 M_0 M0在平面上的垂足 M 1 ( x 1 , y 1 , z 1 ) M_1(x_1,y_1,z_1) M1(x1,y1,z1),则 M 1 M_1 M1 到平面的距离为
d = ∣ M 1 M 0 ⃗ . n ⃗ ∣ n ⃗ d=\frac{|\vec{M_1M_0}.\vec{n}|}{\vec{n}} d=n∣M1M0.n∣
= ∣ A ( x 0 − x 1 ) + B ( y 0 − y 1 ) + C ( z 0 − z 1 ) ∣ A 2 + B 2 + C 2 ↓ 其中 A x 1 + B y 1 + C z 1 + D = 0 = \frac{|A(x_0-x_1)+B(y_0-y_1)+C(z_0-z_1)|}{\sqrt{A^2+B^2+C^2}} \downarrow 其中Ax_1+By_1+Cz_1+D=0 =A2+B2+C2∣A(x0−x1)+B(y0−y1)+C(z0−z1)∣↓其中Ax1+By1+Cz1+D=0
d = ∣ A x 0 + B y 0 + C z 0 + D ∣ A 2 + B 2 + C 2 d=\frac{|Ax_0+By_0+Cz_0+D|}{\sqrt{A^2+B^2+C^2}} d=A2+B2+C2∣Ax0+By0+Cz0+D∣
知识点3 点到平面的距离公式
例5 求点 P(1,2,3)到平面 2x-2y+z-3=0的距离d 。
解: d = ∣ 2 − 4 + 3 − 3 ∣ 2 2 + ( − 2 ) 2 + 1 2 = 2 3 d= \frac{|2-4+3-3|}{\sqrt{2^2+(-2)^2+1^2}} = \frac{2}{3} d=22+(−2)2+12∣2−4+3−3∣=32
知识点2 空间直线方程
1. 直线的一般式
定义:直线可视为两平面 ∏ 1 , ∏ 2 \prod_1,\prod_2 ∏1,∏2的交线,设平面 ∏ 1 , ∏ 2 \prod_1,\prod_2 ∏1,∏2的方程为 A 1 x + B 1 y + C 1 z + D 1 = 0 , A 2 x + B 2 y + C 2 z + D 2 = 0 A_1x+B_1y+C_1z+D_1=0,A_2x+B_2y+C_2z+D_2=0 A1x+B1y+C1z+D1=0,A2x+B2y+C2z+D2=0则方程组:
{ A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z = D 2 = 0 \begin{cases} A_1x+B_1y+C_1z+D_1=0 \\ A_2x+B_2y+C_2z=D_2=0 \end{cases} {A1x+B1y+C1z+D1=0A2x+B2y+C2z=D2=0
称该方程组为直线L的一般方程。

注:过某定直线的平面有无穷多个, 从中任选两个组成的方程组都是
交线的一般式方程,一般式方程不唯一。
2.直线的点向式方程
若非零向量S平行与直线L,则称S为直线的方向向量。
x − x 0 m = y − y 0 n = z − z 0 p \frac{x-x_0}{m}=\frac{y-y_0}{n}=\frac{z-z_0}{p} mx−x0=ny−y0=pz−z0
称上式为直线L的点向式方程。

点向式方程的特殊情况
当点向式中某些分母为零时,其分子也应理解为零。
如当 m = n = 0 , p ≠ 0 m=n=0,p \neq 0 m=n=0,p=0时,直线方程为:
{ x = x 0 y = y 0 \begin{cases} x=x_0 \\ y=y_0 \end{cases} {x=x0y=y0
例1 已知直线I过点M(3,-2,6),且与平面x+3 =0 垂直,求直线L的方程解:因为直线 L 垂直于平面x+3=0,所以可取 L 的方向 s ⃗ = ( 1 , 0.0 ) \vec{s}=(1,0.0) s=(1,0.0)因此,所求直线 L 的点向式方程型如:
x − 3 1 = y + 2 0 = z − 6 0 \frac{x-3}{1}=\frac{y+2}{0}=\frac{z-6}{0} 1x−3=0y+2=0z−6
因此,所求直线转为一般式方程为:
{ y = − 2 z = 6 \begin{cases} y=-2 \\ z=6 \end{cases} {y=−2z=6
3.直线的两点式方程
定义3 设直线 L 过两点M1,M2,则直线 L 的方程为:
x − x 1 x 2 − x 1 = y − y 1 y 2 − y 1 = z − z 1 z 2 − z 1 \frac{x-x_1}{x_2-x_1}=\frac{y-y_1}{y_2-y_1}=\frac{z-z_1}{z_2-z_1} x2−x1x−x1=y2−y1y−y1=z2−z1z−z1
称方程组为直线 L 的两点式方程.
4.直线的参数式方程
若令 x − x 0 m = y − y 0 n = z − z 0 p = t \frac{x-x_0}{m}=\frac{y-y_0}{n}=\frac{z-z_0}{p}=t mx−x0=ny−y0=pz−z0=t
的直线L的参数式方程:
{ x = x 0 + m t y = y 0 + n t z = z 0 + p t , t ∈ R . \begin{cases} x=x_0+mt \\ y=y_0+nt \\ z=z_0+pt \end{cases} ,t \in R. ⎩ ⎨ ⎧x=x0+mty=y0+ntz=z0+pt,t∈R.
例2 用一般式及参数式表示直线:
{ x + y + z + 1 = 0 2 x − y + 3 z + 4 = 0 \begin{cases} x+y+z+1=0 \\ 2x-y+3z+4=0 \end{cases} {x+y+z+1=02x−y+3z+4=0
解:先在直线上找一点令x = 1,解方程组:
{ y + z = − 2 y − 3 z = 6 \begin{cases} y+z=-2 \\ y-3z=6 \end{cases} {y+z=−2y−3z=6
解得:y=0,z=-2
再求直线的方向向量 s ⃗ \vec{s} s.
因为所求直线L与已知两平面的法向量 n 1 ⃗ = ( 1 , 1 , 1 ) \vec{n_1}= (1,1,1) n1=(1,1,1), n 2 = ( 2 , − 1 , 3 ) n_2=(2,-1,3) n2=(2,−1,3)均垂直,所以可取所求直线的方向向量:
s ⃗ = n 1 ⃗ ∗ n 2 ⃗ = [ i ⃗ j ⃗ k ⃗ 1 1 1 2 − 1 3 ] = ( 4 , − 1 , − 3 ) \vec{s}=\vec{n_1}*\vec{n_2}= \left[ \begin{array}{c|c|c} \vec{i} & \vec{j} & \vec{k} \\ 1 & 1 & 1 \\ 2 & -1 & 3 \end{array} \right] =(4,-1,-3) s=n1∗n2= i12j1−1k13 =(4,−1,−3)
故所给直线的点向式方程为:
x − 1 4 = y − 1 = z + 2 − 3 = t \frac{x-1}{4}=\frac{y}{-1}=\frac{z+2}{-3}=t 4x−1=−1y=−3z+2=t
参数式方程为:
{ x = 1 + 4 t y = − t z = − 2 − 3 t \begin{cases} x=1+4t\\ y=-t \\ z=-2-3t \end{cases} ⎩ ⎨ ⎧x=1+4ty=−tz=−2−3t
解题思路:
(1)先找直线上一点;
(2)再找直线的方向向量。
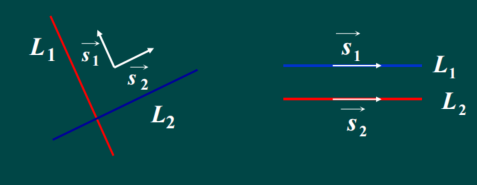
5.两条直线的夹角
1.两直线的夹角
定义5 两直线L1,L2的方向向量的夹角 θ \theta θ (取锐角或直角)称为这两条
直线的夹角。范围在 [ 0 , π 2 ] [0,\frac{\pi}{2}] [0,2π]
2.直线夹角的计算
设直线 L 1 L_1 L1的方向向量为 s 1 ⃗ = ( m 1 , n 1 , p 1 ) \vec{s_1}=(m_1,n_1,p_1) s1=(m1,n1,p1)
设直线 L 2 L_2 L2的方向向量为 s 2 ⃗ = ( m 2 , n 2 , p 2 ) \vec{s_2}=(m_2,n_2,p_2) s2=(m2,n2,p2)
则两直线夹角 的余弦为:
c o s θ = ∣ s 1 ⃗ . s 2 ⃗ ∣ ∣ s 1 ⃗ ∣ . ∣ s 2 ⃗ ∣ cos\theta=\frac{|\vec{s_1}.\vec{s_2}|}{|\vec{s_1}|.|\vec{s_2}|} cosθ=∣s1∣.∣s2∣∣s1.s2∣
即: c o s θ = ∣ m 1 m 2 + n 1 n 2 + z 1 z 2 ∣ m 1 2 + n 1 2 + p 1 2 m 2 2 + n 2 2 + p 2 2 cos\theta=\frac{|m_1m_2+n_1n_2+z_1z_2|}{\sqrt{m_1^2+n_1^2+p_1^2}\sqrt{m_2^2+n_2^2+p_2^2}} cosθ=m12+n12+p12m22+n22+p22∣m1m2+n1n2+z1z2∣
3.直线的特殊位置关系
(1) L 1 ⊥ L 2 − − > s 1 ⃗ ⊥ s 2 ⃗ − − > m 1 m 2 + n 1 n 2 + p 1 p 2 = 0 L_1\bot L_2 --> \vec{s_1}\bot\vec{s_2}--> m_1m_2+n_1n_2+p_1p_2=0 L1⊥L2−−>s1⊥s2−−>m1m2+n1n2+p1p2=0
(2) L 1 / / L 2 − − > s ⃗ / / s 2 ⃗ − − > m 1 m 2 = n 1 n 2 = p 1 p 2 L_1//L_2-->\vec{s}//\vec{s_2}-->\frac{m_1}{m_2}=\frac{n_1}{n_2}=\frac{p_1}{p_2} L1//L2−−>s//s2−−>m2m1=n2n1=p2p1
例3 已知直线 L1过点M(3,-2,6),并与直线 L平行,且直线
L : { x − 3 y + 3 = 0 3 x + y + 6 z + 1 = 0 L: \begin{cases} x-3y+3=0 \\ 3x+y+6z+1=0 \end{cases} L:{x−3y+3=03x+y+6z+1=0
求直线 L 1 L_1 L1的方程。
解:设 n 1 ⃗ , n 2 ⃗ \vec{n_1},\vec{n_2} n1,n2分别为 L 的方程所对应的两平面的法向量,显有 n 1 ⃗ = ( 1 , − 3 , 0 ) , n 2 ⃗ = ( 3 , 1 , 6 ) \vec{n_1}=(1,-3,0),\vec{n_2}=(3,1,6) n1=(1,−3,0),n2=(3,1,6),因为L1//L3,则可取所求直线的一个方向向量
s ⃗ = n 1 ⃗ ∗ n 2 ⃗ = [ i ⃗ j ⃗ k ⃗ 1 − 3 0 3 1 6 ] = ( − 18 , − 6 , 10 ) = 2 ( − 9 , − 3 , 5 ) \vec{s}=\vec{n_1}*\vec{n_2}= \left[ \begin{array}{c|c|c} \vec{i} & \vec{j} & \vec{k} \\ 1 & -3 & 0 \\ 3 & 1 & 6 \end{array} \right] =(-18,-6,10)=2(-9,-3,5) s=n1∗n2= i13j−31k06 =(−18,−6,10)=2(−9,−3,5)
利用点向式得所求直线的方程为:
x − 3 − 9 = y + 2 − 3 = z − 6 5 \frac{x-3}{-9}=\frac{y+2}{-3}=\frac{z-6}{5} −9x−3=−3y+2=5z−6
例4 求以下两直线的夹角 L 1 : x − 1 1 = y − 4 = z − 6 1 L_1: \frac{x-1}{1}=\frac{y}{-4}=\frac{z-6}{1} L1:1x−1=−4y=1z−6
L 2 : { x + y + 2 = 0 x + 2 z = 0 L2: \begin{cases} x+y+2=0 \\ x+2z=0 \end{cases} L2:{x+y+2=0x+2z=0
解:直线L1的方向向量为 s 1 ⃗ = 2 , − 2 , − 1 \vec{s_1}={2,-2,-1} s1=2,−2,−1
直线L2的方向向量为:
s 2 ⃗ = [ i ⃗ j ⃗ k ⃗ 1 1 0 1 0 2 ] = ( 2 , − 2 , − 1 ) \vec{s_2}= \left[ \begin{array}{c|c|c} \vec{i} & \vec{j} & \vec{k} \\ 1 & 1 & 0 \\ 1 & 0 & 2 \end{array} \right] =(2,-2,-1) s2= i11j10k02 =(2,−2,−1)
二直线夹角 ϑ \vartheta ϑ的余弦为:
c o s ϑ = s 1 ⃗ s 2 ⃗ ∣ s 1 ⃗ ∣ ∣ s 2 ⃗ ∣ = 2 2 cos\vartheta=\frac{\vec{s_1}\vec{s_2}}{|\vec{s_1}||\vec{s_2}|}=\frac{\sqrt{2}}{2} cosϑ=∣s1∣∣s2∣s1s2=22
从而 ϑ = π 4 \vartheta=\frac{\pi}{4} ϑ=4π
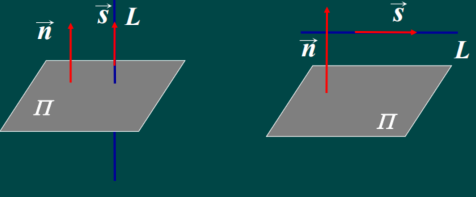
6.直线与平面的夹角
定义6 直线 L 与其在平面 ∏ \prod ∏ 内的投影直线 *L’*的夹角 ϑ \vartheta ϑ称为直线与平面的夹角。
1.直线夹角的计算
设直线 L的方向向量为 s ⃗ = ( m , n , p ) \vec{s}=(m,n,p) s=(m,n,p)
平面 ∏ \prod ∏的法向量 n ⃗ = ( A , B , C ) \vec{n}=(A,B,C) n=(A,B,C)
则直线与平面夹角 θ \theta θ的正弦为
s i n θ = ∣ c o s ( n ⃗ , s ⃗ ) ∣ = ∣ n ⃗ . s ⃗ ∣ ∣ n ⃗ ∣ ∣ s ⃗ ∣ sin\theta=|cos(\vec{n},\vec{s})|=\frac{|\vec{n}.\vec{s}|}{|\vec{n}||\vec{s}|} sinθ=∣cos(n,s)∣=∣n∣∣s∣∣n.s∣
即 s i n θ = A m + B n + C p A 2 + B 2 + C 2 m 2 + n 2 + p 2 sin\theta=\frac{Am+Bn+Cp}{\sqrt{A^2+B^2+C^2}\sqrt{m^2+n^2+p^2}} sinθ=A2+B2+C2m2+n2+p2Am+Bn+Cp
2.直线与平面的特殊位置关系
(1) L ⊥ ∏ − − > s ⃗ / / n ⃗ − − > s ⃗ n ⃗ = 0 − − > A m = B n = C p L\bot\prod --> \vec{s}//\vec{n}-->\vec{s}\vec{n}=0-->\frac{A}{m}=\frac{B}{n}=\frac{C}{p} L⊥∏−−>s//n−−>sn=0−−>mA=nB=pC
(2) L / / ∏ − − > s ⃗ ⊥ n ⃗ − − > s ⃗ . n ⃗ = 0 − − > A m + B n + C p = 0 L//\prod -- > \vec{s}\bot\vec{n} --> \vec{s}.\vec{n}=0--> Am+Bn+Cp=0 L//∏−−>s⊥n−−>s.n=0−−>Am+Bn+Cp=0
例5 求过点(1,-2,4)且与平面 2 x − 3 y + z − 4 = 0 2x-3y+z-4=0 2x−3y+z−4=0垂直的直线方程。
解:取已知平面的法向量 n ⃗ = ( 2 , − 3 , 1 ) \vec{n}=(2,-3,1) n=(2,−3,1)
为所求直线的方向向量。
则直线的点向式方程为
x − 1 2 = y + 2 − 3 = z − 4 1 \frac{x-1}{2}=\frac{y+2}{-3}=\frac{z-4}{1} 2x−1=−3y+2=1z−4
qrt{m2+n2+p^2}}$
2.直线与平面的特殊位置关系
(1) L ⊥ ∏ − − > s ⃗ / / n ⃗ − − > s ⃗ n ⃗ = 0 − − > A m = B n = C p L\bot\prod --> \vec{s}//\vec{n}-->\vec{s}\vec{n}=0-->\frac{A}{m}=\frac{B}{n}=\frac{C}{p} L⊥∏−−>s//n−−>sn=0−−>mA=nB=pC
(2) L / / ∏ − − > s ⃗ ⊥ n ⃗ − − > s ⃗ . n ⃗ = 0 − − > A m + B n + C p = 0 L//\prod -- > \vec{s}\bot\vec{n} --> \vec{s}.\vec{n}=0--> Am+Bn+Cp=0 L//∏−−>s⊥n−−>s.n=0−−>Am+Bn+Cp=0
[外链图片转存中…(img-ITGnnj8A-1694230678106)]
例5 求过点(1,-2,4)且与平面 2 x − 3 y + z − 4 = 0 2x-3y+z-4=0 2x−3y+z−4=0垂直的直线方程。
解:取已知平面的法向量 n ⃗ = ( 2 , − 3 , 1 ) \vec{n}=(2,-3,1) n=(2,−3,1)
为所求直线的方向向量。
则直线的点向式方程为
x − 1 2 = y + 2 − 3 = z − 4 1 \frac{x-1}{2}=\frac{y+2}{-3}=\frac{z-4}{1} 2x−1=−3y+2=1z−4
相关文章:
1.5 空间中的平面与直线
空间中的平面和直线 知识点1 平面方程 1.平面的法向量与法式 定义1 若向量n 垂直与平面N,则称向量n为平面N的法向量。 设一平面通过一直点 M 0 ( x 0 , y 0 , z 0 ) M_0(x_0,y_0,z_0) M0(x0,y0,z0)求垂直于非零向量 n ⃗ \vec{n} n (A,B,C),求改平面N的…...
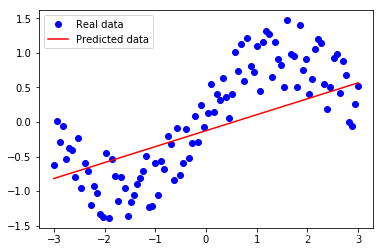
【深度学习】实验06 使用TensorFlow完成线性回归
文章目录 使用TensorFlow完成线性回归1. 导入TensorFlow库2. 构造数据集3. 定义基本模型4. 训练模型5. 线性回归图 附:系列文章 使用TensorFlow完成线性回归 TensorFlow是由Google开发的一个开源的机器学习框架。它可以让开发者更加轻松地构建和训练深度学习模型&a…...
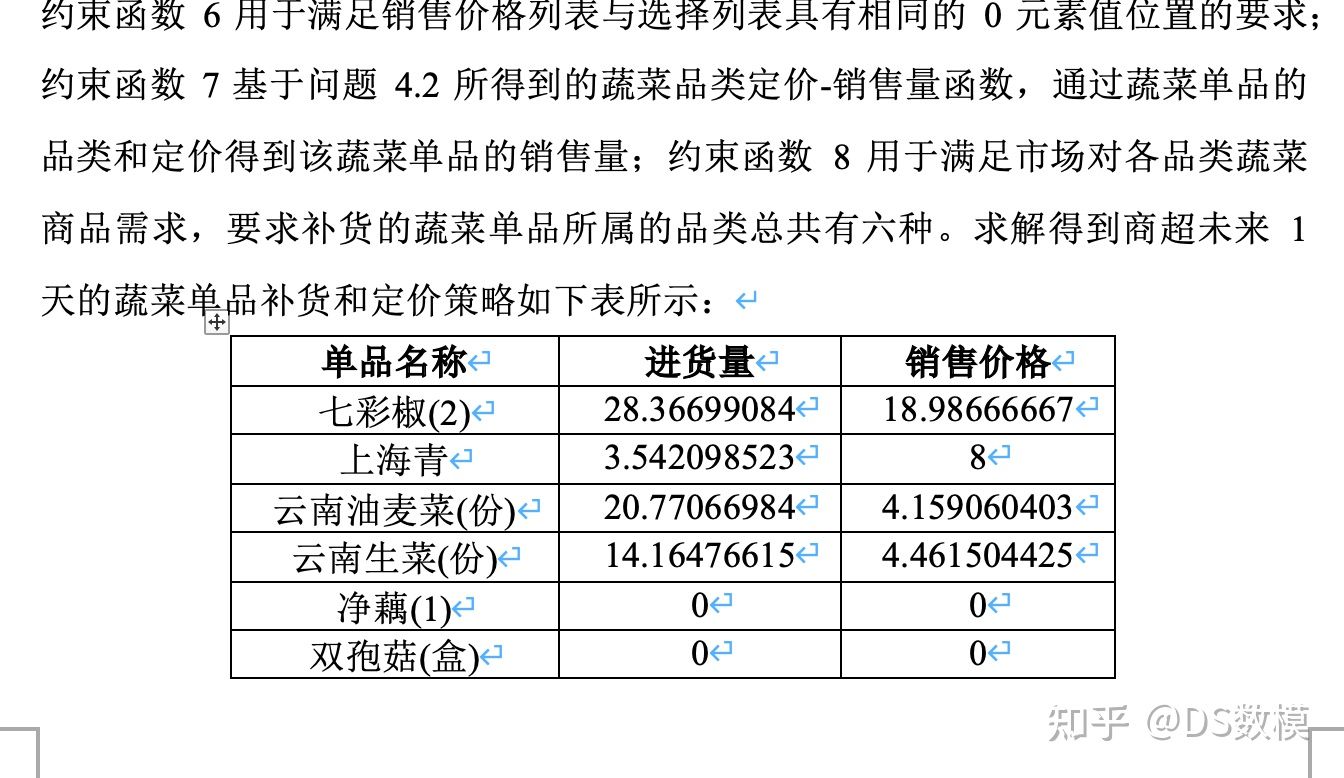
2023国赛 C题论文 蔬菜类商品自动定价与补货策略
因为一些不可抗力,下面仅展示小部分论文,其余看文末 一、问题重述 在生鲜超市管理领域,涉及一系列复杂问题,包括供应链管理、定价策略以及市场需求分析等方面。以蔬菜类商品为案例,这些商品在生鲜商超中具有较短的保…...
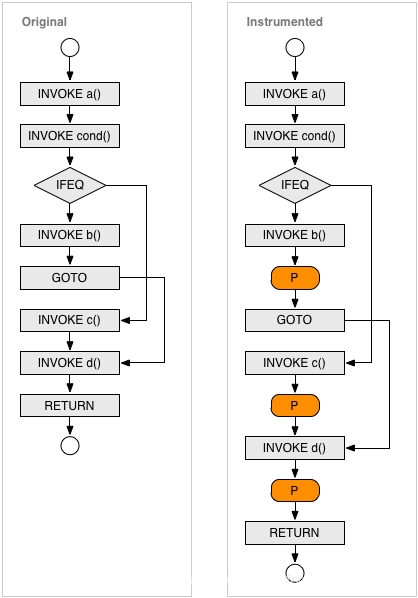
使用 【jacoco】对基于 SpringBoot 和 Dubbo RPC 的项目生成测试覆盖率报告:实践+原理
基于 Dubbo RPC 的项目中有一个提供者项目backend、一个消费者项目gateway、以及注册中心nacos。本篇文章记录在windows本地对该框架的测试过程,以及介绍jacoco的基本原理 测试过程 官网下载安装包解压到本地,https://www.jacoco.org/jacoco/ 只需要用…...

Mac OS合集
MacOS 10.15os 提取码:u12a 如不能点击跳转请复制此链接到浏览器:https://pan.baidu.com/s/1UgPNYprBgJrc25v5ushWxQ?pwdu12a MacOS 11.0 提取码:y77y 如不能点击跳转请复制此链接到浏览器打开:https://pan.baidu.com/s/1srmibmCi2T7UVGvHkCzGKA?pwdy7…...
算法之位运算
前言 位运算在我们的学习中占有很重要的地位,从二进制中数的存储等都需要我们进行位运算 一、位运算复习 1.位运算复习 按位与(&):如果两个相应的二进制位都为1,则该位的结果值才为1,否则为0 按位或( | ):如果…...

flask使用Flask-Mail实现邮件发送
Flask-Mail可以实现邮件的发送,并且可以和 Flask 集成,让我们更方便地实现此功能。 1、安装 使用pip安装: $ pip install Flask-Mail或下载源码安装: $ git clone https://github.com/mattupstate/flask-mail.git $ cd flask-…...
React refers to UMD global, but the current file is a module vite初始化react项目
vite搭建react项目 初始化项目 npm create vite 在执行完上面的命令后,npm 首先会自动下载create-vite这个第三方包,然后执行这个包中的项目初始化逻辑。输入项目名称之后按下回车,此时需要选择构建的前端框架: ✔ Project na…...
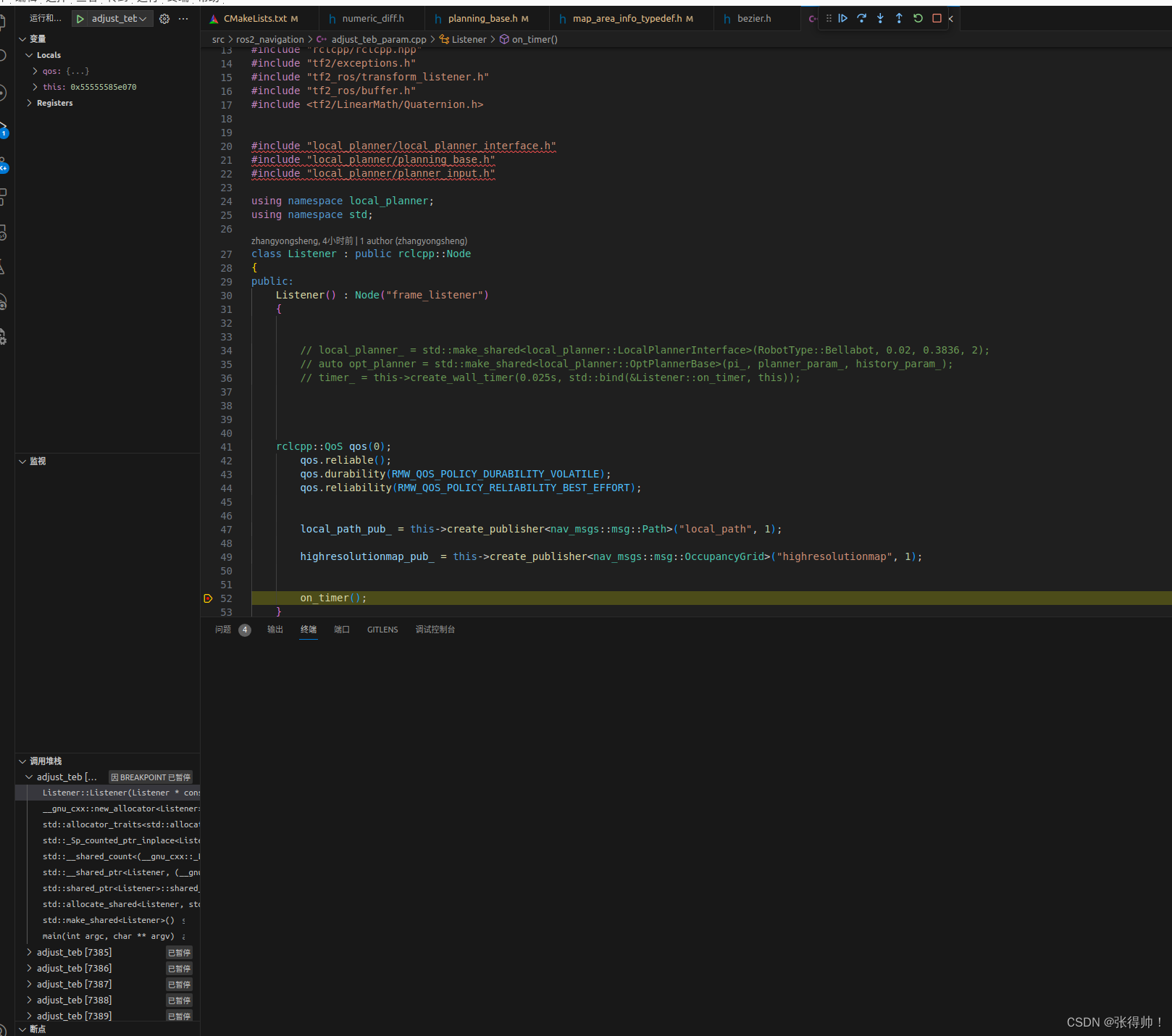
vscode 调试 ROS2
1、在下列目录同层级找到.vscode文件夹 . ├── build ├── install ├── log └── src 2、 安装ros插件 3、创建tasks.json文件,添加下列内容 //代替命令行进行编译 {"version": "2.0.0","tasks": [{"label": &…...

TuyaOS开发学习笔记(2)——NB-IoT开发SDK架构、运行流程
一、SDK架构 1.1 架构框图 基于 TuyaOS 系统,可以裁剪得到的适用于 NB-IoT 协议产品接入的 SDK。SDK 将设备配网、上下行数据通信、产测授权、固件 OTA 升级等接口进行封装,并提供相关函数。 1.2 目录结构 1.2.1 TuyaOS目录说明 adapter:T…...
Qt应用开发(基础篇)——普通按钮类 QPushButton QCommandLinkButton
一、前言 QPushButton类继承于QAbstractButton,是一个命令按钮的小部件。 按钮基类 QAbstractButton 按钮或者命令按钮是所有图形界面框架最常见的部件,当按下按钮的时候触发命令、执行某些操作或者回答一个问题,典型的按钮有OK,A…...
)
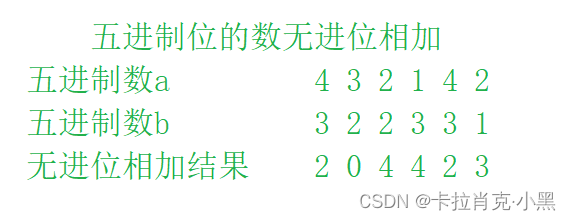
Data Structures Fan(cf)
考察异或运算以及前缀和 题意大概:给你一个长度为n的a数组,一个长度为n的01字符串,会询问q次 当x的值为1 给出 l r 将 l r 区间中的0 改变为1,1改变为0 。当x的值为2是 若随后的数为0 则输出当前字符串中 是0 的a数组中的数异或 …...
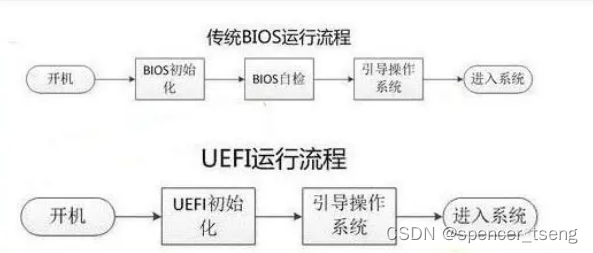
BIOS < UEFI
Basic Input Output System (BIOS) Unified Extensible Firmware Interface (UEFI)...

微信最新更新隐私策略(2023-08-15)
1、manifest.json 配置修改 在mp-weixin: 参数修改(没有就添加) "__usePrivacyCheck__": true, ***2、注意 微信开发者工具调整 不然一直报错 找不到 getPrivacySetting 废话不多说 上代码 3、 编辑首页 或者用户授权界面 <uni-popup…...

Java中xml转javaBean
Java中xml转javaBean maven坐标 <dependency><groupId>com.fasterxml.jackson.dataformat</groupId><artifactId>jackson-dataformat-xml</artifactId><version>2.13.4</version></dependency>代码测试 import cn.hutool.js…...

Spring Boot集成JPA和ClickHouse数据库
简介 Spring Boot是一个用于创建独立的、基于Spring的应用程序的框架。它具有快速开发特性,可以大大减少开发人员的工作量。JPA(Java Persistence API)是Java中处理关系型数据库持久化的标准规范,而ClickHouse是一个高性能、分布…...
Hadoop生态圈中的Hive数据仓库技术
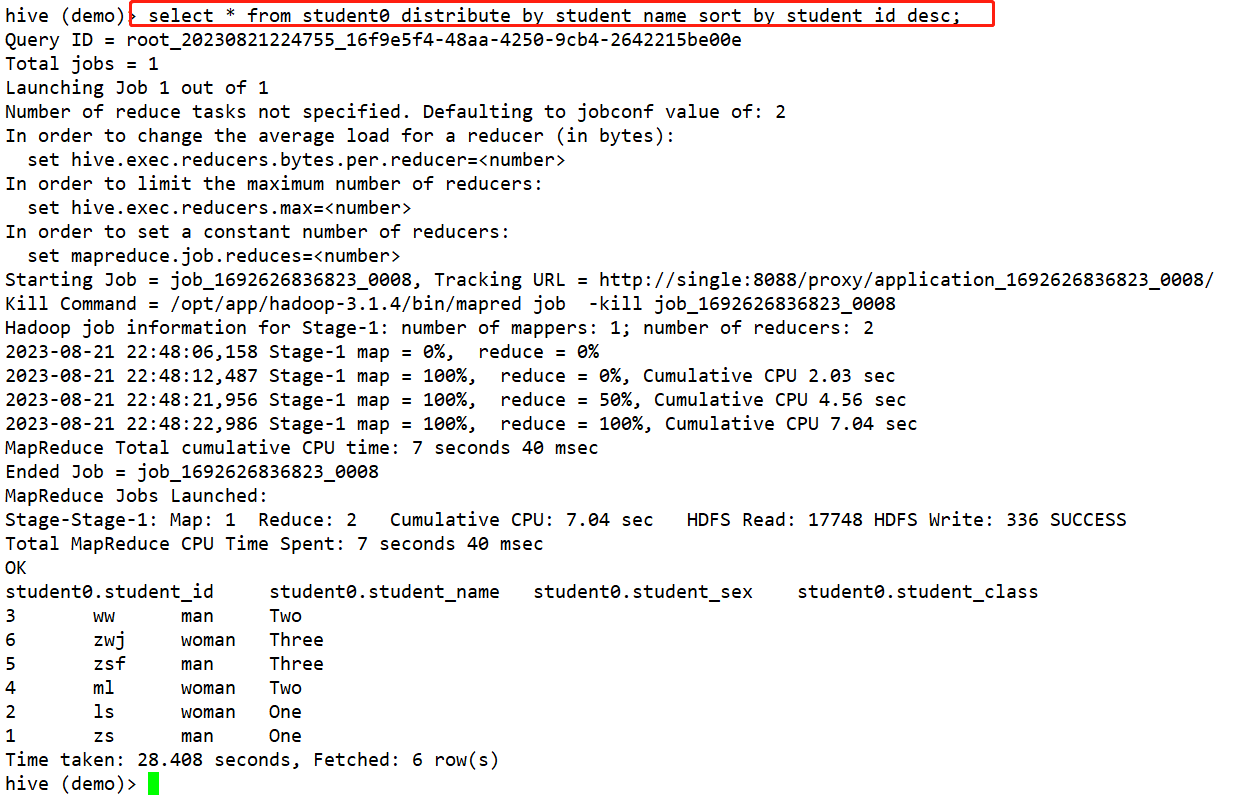
Hadoop生态圈中的Hive数据仓库技术 一、Hive数据仓库的基本概念二、Hive的架构组成三、Hive和数据库的区别四、Hive的安装部署五、Hive的基本使用六、Hive的元数据库的配置问题七、Hive的相关配置项八、Hive的基本使用方式1、Hive的命令行客户端的使用2、使用hiveserver2方法操…...
idea配置gitLab
前言:网上有很多类似的文章,但描述不够详细 步骤1:安装git 如果安装成功再次点击TEST按钮展示如下:git版本 步骤2:idea配置gitlab 查看当前项目管理的 远程仓库再git的地址,该地址可是gitLab的࿰…...
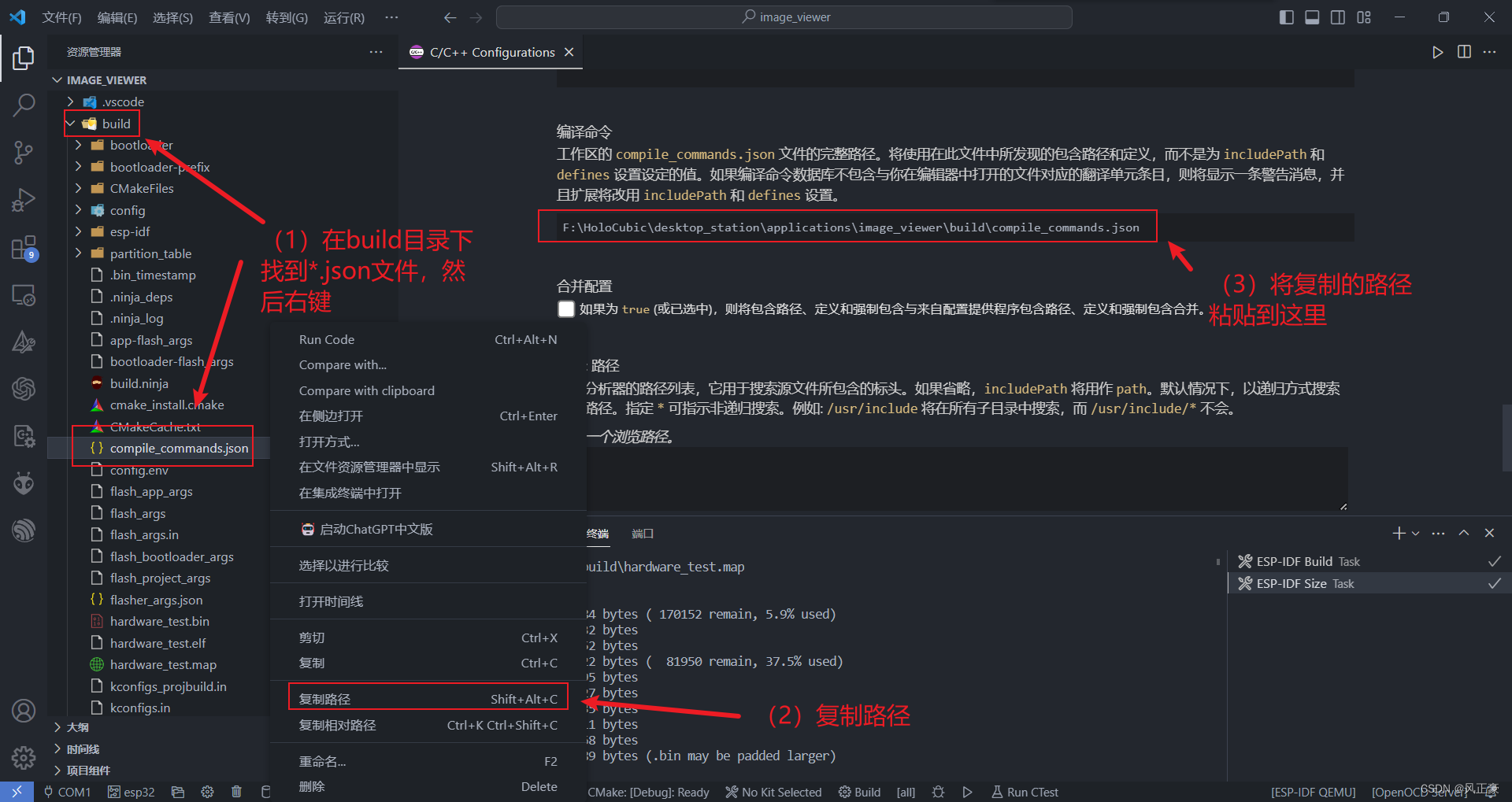
工程可以编译通过,但是Vscode依然有波浪线提示
前言 (1)我们在使用Vscode进行开发的时候,命名文件成功编译通过了,但是Vscode还是有波浪线的提示。 (2)其实成功编译通过就行,但是肯定还会存在一些强迫症患者,硬要消除这个报错。接…...
黑马JVM总结(二)
(1)栈 栈帧对应一次方法的调用,线程是要执行代码的,这些代码都是由一个个方法组成,线程运行的时候每个方法需要的内存叫做一个栈帧 (2)栈的演示 Frames:相当有栈 方法相当于栈帧…...

Umi-OCR:完全免费开源的离线OCR神器,3分钟快速上手文字识别
Umi-OCR:完全免费开源的离线OCR神器,3分钟快速上手文字识别 【免费下载链接】Umi-OCR OCR software, free and offline. 开源、免费的离线OCR软件。支持截屏/批量导入图片,PDF文档识别,排除水印/页眉页脚,扫描/生成二维…...

InsForge:基于Python的Instagram内容自动化创作与发布工具全解析
1. 项目概述与核心价值最近在折腾一个挺有意思的开源项目,叫InsForge。这名字听起来有点“工业锻造”的味道,实际上,它是一个专注于Instagram内容创作与自动化的工具集。简单来说,它试图帮你解决在Instagram上创作、发布、管理内容…...

5分钟免费制作专业AI翻唱:AICoverGen完整指南
5分钟免费制作专业AI翻唱:AICoverGen完整指南 【免费下载链接】AICoverGen A WebUI to create song covers with any RVC v2 trained AI voice from YouTube videos or audio files. 项目地址: https://gitcode.com/gh_mirrors/ai/AICoverGen 想让AI帮你翻唱…...

ncmdumpGUI:3分钟掌握网易云音乐ncm格式转换的终极方案
ncmdumpGUI:3分钟掌握网易云音乐ncm格式转换的终极方案 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾经在网易云音乐下载了心爱的歌曲&a…...

如何快速掌握openpilot:从零到精通的自动驾驶系统终极指南
如何快速掌握openpilot:从零到精通的自动驾驶系统终极指南 【免费下载链接】openpilot openpilot is an operating system for robotics. Currently, it upgrades the driver assistance system on 300 supported cars. 项目地址: https://gitcode.com/GitHub_Tre…...

基于轨道模型构建现代化流程编排系统:从概念到实践
1. 项目概述与核心价值最近在GitHub上看到一个挺有意思的项目,叫s4kuraN4gi/orbit-app。乍一看这个仓库名,可能很多人会有点懵,不知道它具体是做什么的。我花了一些时间深入研究,发现这是一个围绕“轨道”概念构建的现代化应用。这…...

AI编程助手安全规则实战:从SQL注入防御到团队安全基线构建
1. 项目概述:当AI编程助手遇上安全红线最近在GitHub上看到一个挺有意思的项目,叫“cursor-security-rules”。光看名字,你大概能猜到它和Cursor这个AI编程工具有关,而且重点是“安全规则”。没错,这个项目本质上是一个…...

基于Helm Chart的JupyterHub生产级部署与运维实战指南
1. 项目概述:为什么我们需要一个可扩展的JupyterHub部署方案?如果你在团队里负责过数据科学或机器学习平台的搭建,大概率会为Jupyter Notebook的部署和管理头疼过。单个Jupyter Notebook服务给一两个人用还行,一旦团队规模扩大到十…...

Ash印相渲染失败率骤升47%?紧急预警:V6.2更新后Gamma 2.2→2.4迁移引发的印相断层危机
更多请点击: https://intelliparadigm.com 第一章:Ash印相渲染失败率骤升47%的全局现象与危机定性 近期,全球多个采用 Ash 印相引擎(v3.8.2)的影像处理平台集中报告渲染任务异常终止、输出空白或超时中断。监控数据显…...

如何为深信服超融合平台上的应用快速接入大模型能力
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 如何为深信服超融合平台上的应用快速接入大模型能力 对于在深信服超融合平台上部署业务应用的企业开发团队而言,集成智…...