自动驾驶:轨迹预测综述
自动驾驶:轨迹预测综述
- 轨迹预测的定义
- 轨迹预测的分类
- 基于物理的方法(Physics-based)
- 基于机器学习的方法(Classic Machine Learning-based)
- 基于深度学习的方法(Deep Learning-based)
- 基于强化学习的方法(Reinforcement Learning-based)
- 数据集/评价指标
轨迹预测的定义
轨迹预测问题可以表述为在给定的一个场景下,使用交通参与者的历史状态预测估计其未来状态。历史状态可以来自于车端或路端,状态信息一般包括交通参与者的位置,也有可能包括速度、加速度、朝向角等信息。场景信息一般包括车辆运动学(或动力学)、路侧信息(地图、交通信号灯、交通规则等)和交通参与者之间的交互信息等因素。
轨迹预测的输入是一系列具有历史时间信息的交通参与者状态。
轨迹预测的输出是一系列具有未来时间信息的交通参与者状态,一般有三种形式:单模态(Unimodal)、多模态(Multimodal)和意图(Intention)。
- 单模态是指一个或多个交通参与者的一个未来轨迹;
- 多模态是指一个或多个交通参与者的多个未来轨迹;
- 意图可以是最终输出的一部分,也可以是一个中间过程,提供了交通参与者的轨迹意图。
轨迹预测的分类
基于物理的方法(Physics-based)
基于物理的方法是借助于车辆的运动学模型或动力学模型,使用单一轨迹预测、卡尔曼滤波或蒙特卡罗的方法对其轨迹进行预测。虽然简单高效、计算复杂度低,但是其预测精度相对较低,一般仅适用于短期预测(不超过1s),但基于学习的方法通常可以考虑融合基于物理的方法进而提升预测精度。
- 单一轨迹预测:该方法认为车辆状态是已知且无噪声的,使用匀速、匀加速度或匀角速度和加速度等模型对车辆的状态进行预测,此方法虽然简单高效,但未考虑路侧信息以及状态的不确定性,不适合于长期轨迹预测。
- 卡尔曼滤波:该方法将车辆状态的不确定性(噪声)考虑在内,并认为噪声呈高斯分布,通过不断地迭代预测车辆状态的平均值和方差。此方法虽然考虑了状态的不确定性,但简单地认为噪声呈高斯分布是不可靠的,一些学者也提出了多模态轨迹预测的卡尔曼滤波、考虑交互因素的卡尔曼滤波等方法。
- 蒙特卡罗:此方法可以对交通参与者的状态分布进行模拟,它对历史状态输入进行随机采样,利用物理模型(动力学、运动学模型)对未来状态进行估计,其中的历史状态可以是已知且确定的,亦可以是由估计算法得到的不确定的。
基于机器学习的方法(Classic Machine Learning-based)
基于机器学习的方法是应用数据驱动的模型来预测轨迹,例如高斯过程(Gaussian Process)、支持向量机(Support Vector Machine)、隐式马尔可夫链(Hidden Markov)、动态贝叶斯(Dynamic Bayesian)、K近邻(K-Nearest Neighbors)、决策树(Dynamic Tree)等等。此类方法利用经典机器学习的分类与回归方法对交通参与者的轨迹与意图进行学习与预测,相较于基于物理的方法,它可以更好地融合路侧、交互等场景信息,预测精度得以提升,但此方法针对复杂场景可能束手无策。
基于深度学习的方法(Deep Learning-based)
基于深度学习的方法一般针对历史状态的输入,进行特征提取,再通过回归来预测未来状态输出。例如循环神经网络(Recurrent Neural Network,RNN)、卷积神经网络(Convolutional Neural Network,CNN)、基于Transformer的注意力网络(Attention Network based on Transformer)、图神经网络(Graph Neural Network,GNN)以及生成式网络(Generative Adversarial Network,GAN)等。此方法已经成为研究的主流方向,并达到了SOTA水平,相较于基于物理、机器学习的方法,基于深度学习的方法可以预测更长时间的状态。
- 循环神经网络:它与有效处理空间信息的卷积神经网络不同,循环神经网络被设计用来处理时间信息,它存储每一步时间信息,利用隐藏状态和历史轨迹的特征输入来预测未来轨迹的输出。当时间步数较大时,循环神经网络容易发生梯度爆炸。使用门控循环神经网络(Gated RNN)可以解决此问题,例如长短期记忆网络(Long Short Term Memory Network,LSTM)和门控循环单元(Gated Recurrent Unit,GRU)。
- 卷积神经网络:由于轨迹具有很强的时空连续性,部分学者认为使用CNN预测会更好。它们采用序列到序列的结构,以历史轨迹为输入,在全连接层之后叠加卷积层实现时间连续性,再通过全连接层输出未来轨迹。实验表明,基于CNN的模型运行速度更快。
- 卷积循环神经网络:卷积神经网络适用于提取空间信息,循环神经网络适用于处理时间信息,一些学者将两者联合在一起进行建模。
- 注意力网络:随着Transformer在计算机视觉和自然语言处理的爆火,一些学者也将Transformer的编码器与解码器应用到轨迹预测中,首先历史状态作为编码器的输入,object query作为未来状态与历史状态的编码输出交互,得到最终的预测轨迹。实验证明此方法在长时序的预测任务中表现良好,不仅方便轨迹序列的建模,也方便对环境和交通参与者之间的交互进行建模。
- 图神经网络:每一个交通参与者被认为图中的一个节点(node),每一个节点通过边(edge)与其他节点相关联。因此图神经网络方便对交互信息进行建模,典型的方法主要有图卷积网络和图注意力网络。
- 生成式网络:为了解释轨迹预测的多模态属性与不确定性,一些学者提出使用生成式网络来预测轨迹,包括生成对抗网络(Generative Adversarial Network,GAN)和条件变分自动编码器(Conditional Variational Auto Encoder,CVAE)。
基于强化学习的方法(Reinforcement Learning-based)
传统的强化学习是基于马尔可夫决策过程(Markov decision process,MDP),利用与环境交互和人为设计的奖励函数,以最大化奖励为准则来得到最优的行为,基于强化学习的轨迹预测方法包括:逆向强化学习(Inverse Reinforcement Learning,IRL)、生成对抗模仿学习(Generative Adversarial Imitation Learning,GAIL)和深度逆向强化学习(Deep Inverse Reinforcement Learning,DIRL)等等。
- 逆向强化学习:此方法是指奖励函数并非人为设计,而是根据专家演示学习一个奖励函数得到最优的行为进而对轨迹进行预测,逆向强化学习主要有基于最大化裕度和最大化熵两种优化方法来更新学习奖励函数的权重。最大化裕度的方法是通过最小化专家演示和预测轨迹之间的特征期望来更新奖励函数的权重,然而大多数基于裕度的方法在特征期望匹配方面是模糊的。而最大化熵的方法使用多个奖励函数来解释专家演示的模糊性。
- 生成对抗模仿学习:此方法使用生成式网络GAN进行模仿学习,它利用GAN生成轨迹,使之与专家演示尽可能相近,再利用鉴别器判断是否此轨迹是一个专家演示。
- 深度逆向强化学习:由于预测任务是非线性的,不同于逆向强化学习,深度逆向强化学习利用全卷积神经网络学习一个复杂的非线性奖励函数。目前,大多数DIRL算法可以直接利用原始传感器数据(图像、点云等)进行建模。
数据集/评价指标
关于轨迹预测数据集包括但不限于NuScenes、Waymo、Lyft Level 5、Argoverse、INTERACTION、HighD、Apolloscape、KITTI、NGSIM等。
评价指标:均方根误差(Root Mean Squared Error,RMSE)、负对数似然(Negative Log Likelihood,NLL)、平均位移误差(Average Displacement Error,ADE)、最终位移误差(Final Displacement Error,FDE)、错失率(Miss Rate,MR)、计算时间(Computation Time)、预测视野(Prediction Horizon)等。
相关文章:

自动驾驶:轨迹预测综述
自动驾驶:轨迹预测综述 轨迹预测的定义轨迹预测的分类基于物理的方法(Physics-based)基于机器学习的方法(Classic Machine Learning-based)基于深度学习的方法(Deep Learning-based)基于强化学习…...

【uniapp/uview】u-datetime-picker 选择器的过滤器用法
引入:要求日期选择的下拉框在分钟显示时,只显示 0 和 30 分钟; <u-datetime-picker :show"dateShow" :filter"timeFilter" confirm"selDateConfirm" cancel"dateCancel" v-model"value1&qu…...

如何使用Docker部署Nacos服务?Nacos Docker 快速部署指南: 一站式部署与配置教程
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...

yocto stm32mp1集成ros
yocto stm32mp1集成ros yocto集成ros下载meta-rosyocto集成rosrootfs验证 yocto集成ros 本章节介绍yocto如何集成ros系统用来作机器人开发。 下载meta-ros 第一步首先需要下载meta-ros layer,meta-ros的链接如下:https://github.com/ros/meta-ros/tre…...
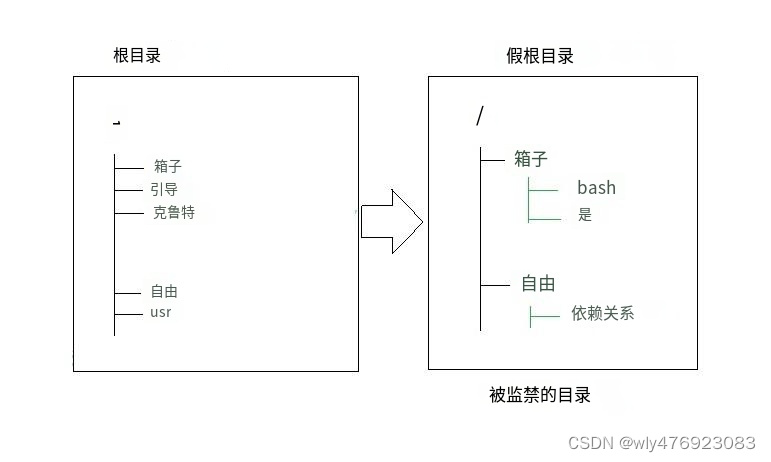
Linux 中的 chroot 命令及示例
Linux/Unix系统中的chroot命令用于更改根目录。Linux/Unix 类系统中的每个进程/命令都有一个称为root 目录的当前工作目录。它更改当前正在运行的进程及其子进程的根目录。 在此类修改的环境中运行的进程/命令无法访问根目录之外的文件。这种修改后的环境称为“ chroot监狱”或…...

oracle的redo与postgreSQL的WAL以及MySQL的binlog区别
Oracle的redo日志、PostgreSQL的WAL(Write-Ahead Log)以及MySQL的binlog(二进制日志)都是数据库的事务日志,但它们在实现和功能上有一些区别。 1. 实现方式: - Oracle的redo日志是通过在事务提交前将事务操作记录到磁盘上的重做日志文件中来实现的。 - PostgreSQL…...

进入低功耗和唤醒
休眠模式 进入休眠模式 如果使用 WFI 指令进入睡眠模式,则嵌套向量中断控制器 (NVIC) 确认的任意外设中断都会 将器件从睡眠模式唤醒。 如果使用 WFE 指令进入睡眠模式,MCU 将在有事件发生时立即退出睡眠模式。唤醒事件可 通过以下方式产生ÿ…...
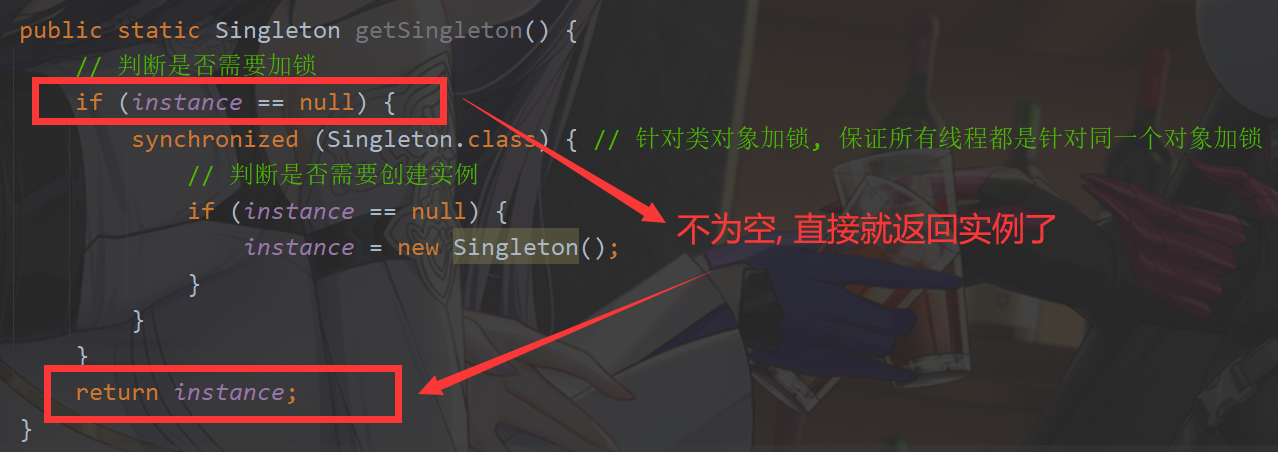
【多线程】volatile 关键字
volatile 关键字 1. 保证内存可见性2. 禁止指令重排序3. 不保证原子性 1. 保证内存可见性 内存可见性问题: 一个线程针对一个变量进行读取操作,另一个线程针对这个变量进行修改操作, 此时读到的值,不一定是修改后的值,即这个读线…...

【Windows注册表内容详解】
Windows注册表内容详解 第一章节 注册表基础 一、什么是注册表 注册表是windows操作系统、硬件设备以及客户应用程序得以正常运行和保存设置的核心“数据库”,也可以说是一个非常巨大的树状分层结构的数据库系统。 注册表记录了用户安装在计算机上的软件和每个程…...
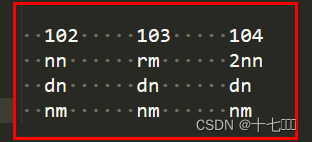
大数据Hadoop入门之集群的搭建
hadoop的三种运行模式 本地模式:测试本地的hadoop是否能够运行,用来运行官方的代码。伪分布模式:原先有人拿来测试,目前测试都不用这个模式了。完全分布模式:多台服务器组成分布式环境,生产环境使用 分布式主机文件同步命令 sc…...

华为云云耀云服务器L实例评测|基于云服务器的minio部署手册
华为云云耀云服务器L实例评测|基于云服务器的minio部署手册 【软件安装版本】【集群安装(是)(否)】 版本 创建人 修改人 创建时间 备注 1.0 jz jz 2023.9.2 minio华为云耀服务器 一. 部署规划与架…...

龙智携手Atlassian和JFrog举办线下研讨会,探讨如何提升企业级开发效率与质量
2023年9月8日,龙智将携手Atlassian和JFrog于上海举办线下研讨会,以“大规模开发创新:如何提升企业级开发效率与质量”为主题,邀请龙智高级咨询顾问、Atlassian认证专家叶燕秀,紫龙游戏上海研发中心高级项目管理主管叶凯…...

2023数学建模国赛A题定日镜场的优化设计- 全新思路及代码
背景资料关键信息和要点如下: 定日镜:塔式太阳能光热发电站的基本组件,由纵向转轴和水平转轴组成,用于反射太阳光。 定日镜场:由大量的定日镜组成的阵列。 集热器:位于吸收塔顶端,用于收集太…...

CSS笔记(黑马程序员pink老师前端)圆角边框
圆角边框 border-radius:length; 效果显示 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>Documen…...
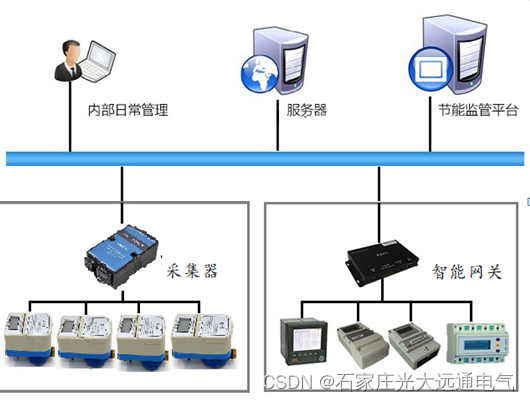
水表电表集中远程抄表系统分析
电表水表远程抄表系统石家庄光大远通电气有限公司主要经营自动抄表,远程抄表,集中抄表,新供应信息,是石家庄光大远通电气有限公司自动远程抄表系统集信号采集、网络通信于一体的高性能抄表装置,该系统以485通讯方式读取水表电表的数据,以MBUS通讯方式读取…...

Android 通知
1. 原生Android通知的几种显示方式: 状态栏的图标:发出通知后,通知会先以图标的形式显示在状态栏中。 抽屉式通知栏:用户可以在状态栏向下滑动以打开抽屉式通知栏,并在其中查看更多详情及对通知执行操作。在应用或用户…...
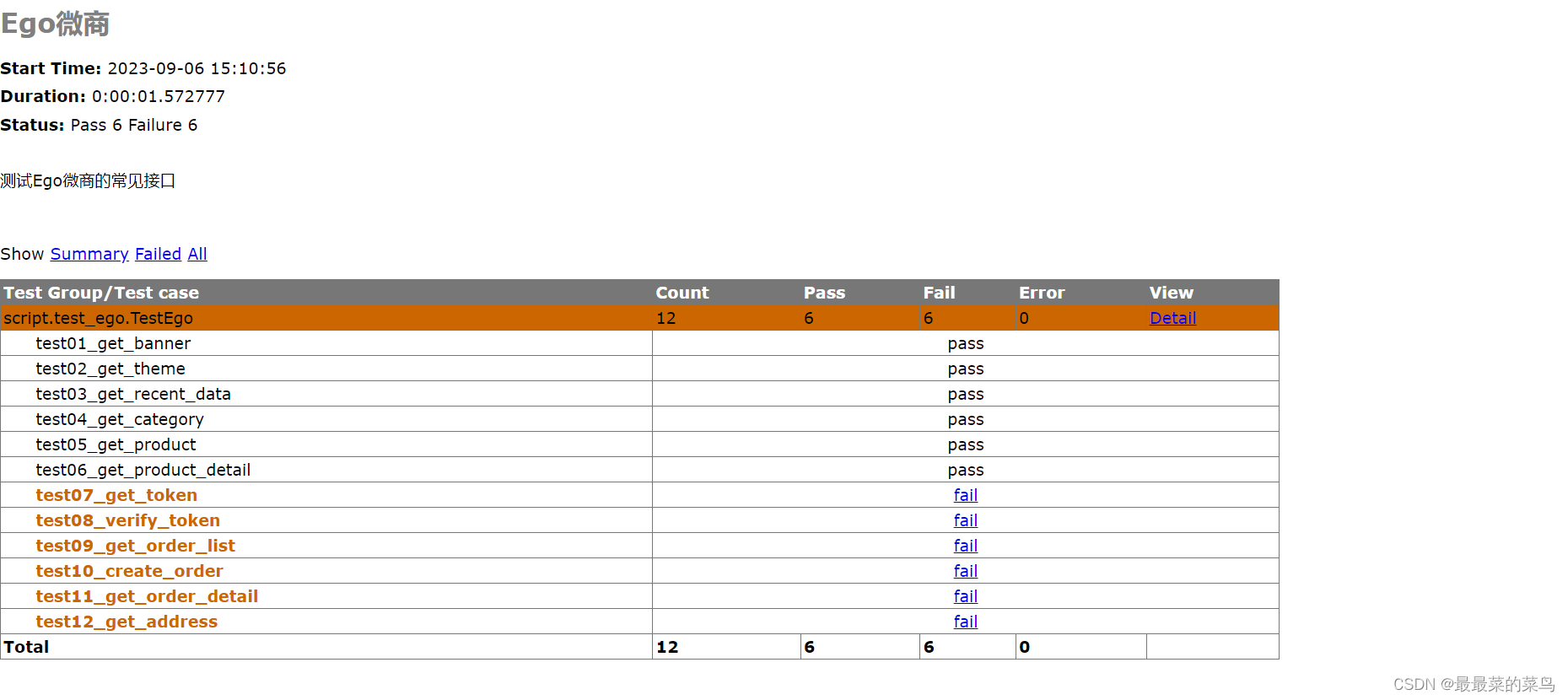
【Unittest】Requests实现小程序项目接口测试
文章目录 一、搭建接口测试框架二、初始化日志三、定义全局变量四、封装接口五、编写测试用例六、生成测试报告 一、搭建接口测试框架 目录结构如下。 二、初始化日志 在utils.py文件中编写如下如下代码,初始化日志。 # 导入app.py全局变量文件 import app import l…...

Mac 搭建本地服务器
文章目录 一、启动服务器二、添加文件到本地服务三、手机/其他电脑 访问本机服务器 MacOS 自带Apatch 服务器。所以我这里选择Apatch服务器搭建 一、启动服务器 在safari中输入 http://127.0.0.1/ ,如果页面出现 it works,则代表访问成功。启动服务器 …...

区块链基础之编写合约二
一、了解solidity中的关键字。 二、了解solidity中的类型。 三、编写合约 1.这里列出一些solidity中的关键字,有哪些。 pragma 作用:是告知编译器如何处理源代码的通用指令(例如, pragma once )。public 作用&#…...

【前端基础】js 如何判断一个值是数组
在JavaScript中,可使用不同的方法来判断一个值是否是一个数组。以下是一些常用的方法: 使用 Array.isArray() 方法: if (Array.isArray(value)) {// 值是一个数组 } else {// 值不是一个数组 }Array.isArray() 方法是最简单和推荐的方法&…...

原生TypeScript待办清单:纯前端架构、观察者模式与拖拽排序实践
1. 项目概述:一个由AI辅助构思的现代化待办清单最近在整理个人项目时,我重新审视了一个之前用TypeScript写的待办清单应用。这个项目的初衷很简单:我需要一个极简、快速、完全由我掌控的待办工具,它不需要登录,数据就存…...

数据中台下半场比的是治理:六家主流厂商四维度横向测评
一、数据治理:决定数据中台价值兑现的关键变量2026年,一个行业的共识正在变得清晰:数据中台的上限由计算架构决定,但下限由数据治理决定。过去数年,大量企业投入资源搭建了数据中台的基础设施——数据湖、数仓、调度引…...

终极开源硬件控制方案:5分钟实现OMEN游戏本深度性能调优
终极开源硬件控制方案:5分钟实现OMEN游戏本深度性能调优 【免费下载链接】OmenSuperHub 使用 WMI BIOS控制性能和风扇速度,自动解除DB功耗限制。 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub OmenSuperHub是一款专为惠普OMEN游戏本…...

ARM GIC中断控制器架构与关键寄存器详解
1. ARM GIC中断控制器架构概述ARM通用中断控制器(GIC)是现代ARM处理器中负责中断管理的核心组件,它实现了复杂的中断分发和处理机制。GIC架构从v2版本发展到现在的v4版本,功能不断增强,支持多核处理、虚拟化扩展和安全隔离等高级特性。GIC主要…...

Alph:一键统一配置AI编程助手MCP服务器的命令行工具
1. 项目概述:告别手动配置的混乱时代 如果你和我一样,日常开发中同时用着 Cursor、Claude Code、Gemini CLI 这些 AI 编程助手,那你一定对下面这个场景深恶痛绝:每次想给它们接入一个新的 MCP 服务器,都得像个考古学家…...

Nihonga风格AI生成稀缺资源包泄露:含17世纪狩野派笔触扫描集、200+古籍《本朝画史》描述性Prompt语料库、及唯一通过日本文化厅AI伦理审查的商用授权协议范本
更多请点击: https://intelliparadigm.com 第一章:Nihonga风格AI生成资源包的伦理边界与文化权重 文化符号的不可压缩性 Nihonga(日本画)并非仅由矿物颜料、金箔或桑皮纸构成的技术集合,其内嵌着神道自然观、物哀美学…...

5分钟搞定Mac Boot Camp驱动部署:Brigadier全攻略
5分钟搞定Mac Boot Camp驱动部署:Brigadier全攻略 【免费下载链接】brigadier Fetch and install Boot Camp ESDs with ease. 项目地址: https://gitcode.com/gh_mirrors/bri/brigadier 还在为Mac安装Windows系统时繁琐的驱动匹配而烦恼吗?每次重…...

YOLO26改进| downsample |网络深层多分支互补鲁棒下采样模块
💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡 本文给大家带来的教程是将YOLO26的下采样替换为DRFD来提取特征。文章在介绍主要的原理后,将手把手教学如何进行模块的代码添加和修…...

Cursor Pro永久免费使用终极指南:如何绕过试用限制完整教程
Cursor Pro永久免费使用终极指南:如何绕过试用限制完整教程 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached you…...

工业 AI 赋能采购:智能供应商匹配重构招标流程
Q1:传统企业采购招标,供应商对接与筛选存在哪些固有痛点?传统工业企业采购招标模式高度依赖人工经验,存在三大核心痛点:供应商资源固化:每次招标都需从零手动联络供应商,仅依靠采购人员个人记忆…...