地图结构 | 图解占据栅格地图原理(附Matlab建图实验)
目录
- 0 专栏介绍
- 1 栅格地图
- 1.1 应用场景
- 1.2 基本概念
- 2 占据栅格地图
- 2.1 更新模型
- 2.2 截断策略
- 3 仿真实现
- 3.1 算法流程
- 3.2 Matlab实现
0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。
🚀详情:图解自动驾驶中的运动规划(Motion Planning),附几十种规划算法
1 栅格地图
1.1 应用场景
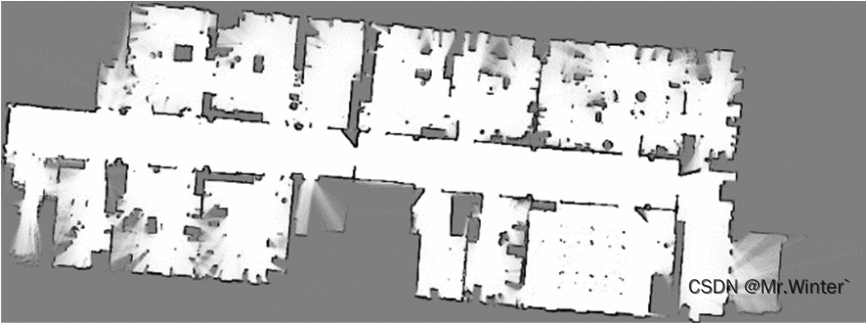
栅格地图(grid map)是在机器人和自动化领域中广泛使用的一种地图表示方法。它将环境划分为规则的网格单元,并在每个单元中存储关于该区域的信息。每个单元可以表示空闲、障碍物、未知区域或其他地图属性。
栅格地图最主要的应用是服务于机器人导航中的路径规划和避障。机器人可以利用栅格地图中的障碍物信息来规划安全的路径,并避开可能的碰撞或危险区域。同时,栅格地图也是SLAM算法中常用的地图表示方式之一。通过与传感器数据融合,机器人能够同时进行自身位置估计和地图构建。
总之,栅格地图是一种简单且直观的地图表示方法,它可以提供对环境的可视化和语义信息,并为机器人的感知、规划和决策提供基础。然而,栅格地图也存在分辨率、存储消耗和精度等方面的限制,在实际应用中需要权衡和优化。
1.2 基本概念
栅格地图的基本概念总结如下
-
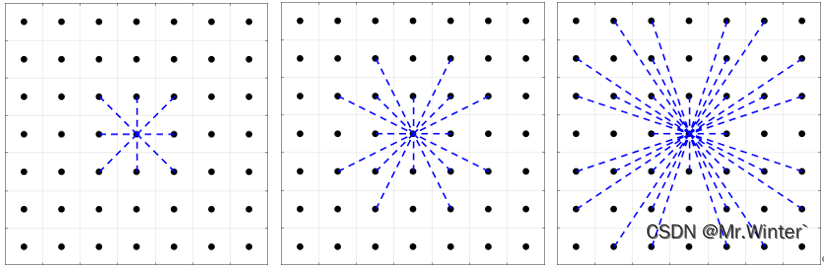
邻域模式
栅格地图中常用的邻域模式有8邻域法、24邻域法和48邻域法,如下所示
-
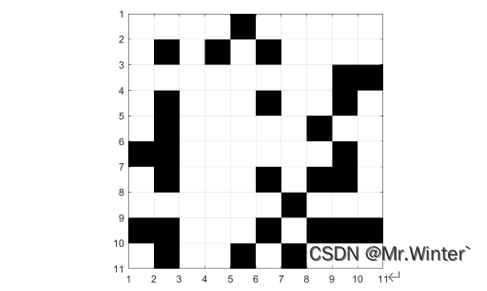
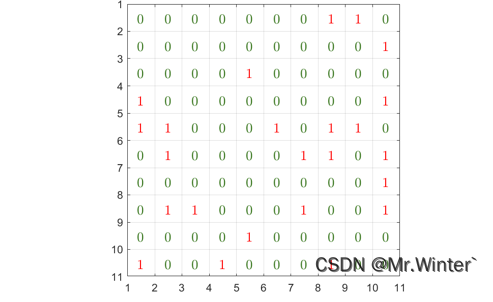
栅格示数
栅格地图中每个栅格都被赋予栅格示数,其指明了该栅格在全局环境中表达的语义。例如0表示无障碍的自由栅格,1表示障碍物
-
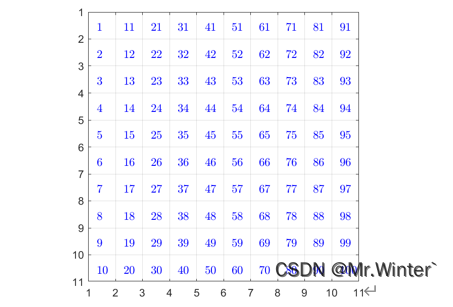
栅格坐标
栅格地图可视为离散直角坐标系,其中可用有序二元组 ( i , j ) (i,j) (i,j)定位栅格 -
栅格序号
栅格按照行列顺序依次进行的编号称为栅格序号,由于栅格序号是一维线性的,因此可以加速信息处理与运算
-
栅格粒度
栅格对应物理世界的比例系数称为栅格粒度,栅格粒度越小,环境分辨率越大,对环境的刻画越具体、丰富。但相应地,存储地图所占的内存、处理地图耗费的时间越多
2 占据栅格地图
在工程上,通常使用占据法构建占据栅格地图(Occupancy Grid Map)。考虑到构建栅格地图使用的激光雷达存在噪声,即在相同条件下对障碍物的相对距离探测可能有误差,因此引入概率定义栅格状态:对于地图中的栅格 s s s, P ( s = 1 ) P\left( s=1 \right) P(s=1)表示栅格被占据的概率; P ( s = 0 ) = 1 − P ( s = 1 ) P\left( s=0 \right) =1-P\left( s=1 \right) P(s=0)=1−P(s=1)表示栅格自由的概率。实际应用时,使用一种更紧凑的表达
o d d ( s ) = P ( s = 1 ) P ( s = 0 ) \mathrm{odd}\left( s \right) =\frac{P\left( s=1 \right)}{P\left( s=0 \right)} odd(s)=P(s=0)P(s=1)
2.1 更新模型
构建地图的问题可形式化为:已知机器人激光传感器的观测序列 ,更新地图中栅格的后验概率 ,根据贝叶斯公式和马尔科夫链可得
P ( s ∣ z 1 : t ) = P ( z t ∣ s , z 1 : t − 1 ) P ( s ∣ z 1 : t − 1 ) P ( z t ∣ z 1 : t − 1 ) = P ( z t ∣ s ) ⏞ M a r k o v P ( s ∣ z 1 : t − 1 ) P ( z t ∣ z 1 : t − 1 ) = P ( s ∣ z t ) P ( z t ) ⏞ B a y e s P ( s ∣ z 1 : t − 1 ) P ( s ) P ( z t ∣ z 1 : t − 1 ) \begin{aligned}P\left( s|z_{1:t} \right) &=\frac{P\left( z_t|s,z_{1:t-1} \right) P\left( s|z_{1:t-1} \right)}{P\left( z_t|z_{1:t-1} \right)}\\\,\, & =\frac{{ \overset{\mathrm{Markov}}{\overbrace{P\left( z_t|s \right) }}}P\left( s|z_{1:t-1} \right)}{P\left( z_t|z_{1:t-1} \right)}\\&=\frac{{ \overset{\mathrm{Bayes}}{\overbrace{P\left( s|z_t \right) P\left( z_t \right) }}}P\left( s|z_{1:t-1} \right)}{{ P\left( s \right) }P\left( z_t|z_{1:t-1} \right)}\end{aligned} P(s∣z1:t)=P(zt∣z1:t−1)P(zt∣s,z1:t−1)P(s∣z1:t−1)=P(zt∣z1:t−1)P(zt∣s) MarkovP(s∣z1:t−1)=P(s)P(zt∣z1:t−1)P(s∣zt)P(zt) BayesP(s∣z1:t−1)
计算后验概率优势比
P ( s = 1 ∣ z 1 : t ) P ( s = 0 ∣ z 1 : t ) = P ( s = 1 ∣ z t ) P ( s = 0 ∣ z t ) ⋅ P ( s = 1 ∣ z 1 : t − 1 ) P ( s = 0 ∣ z 1 : t − 1 ) ⋅ P ( s = 0 ) P ( s = 1 ) \frac{P\left( s=1|z_{1:t} \right)}{P\left( s=0|z_{1:t} \right)}=\frac{P\left( s=1|z_t \right)}{P\left( s=0|z_t \right)}\cdot \frac{P\left( s=1|z_{1:t-1} \right)}{P\left( s=0|z_{1:t-1} \right)}\cdot \frac{P\left( s=0 \right)}{P\left( s=1 \right)} P(s=0∣z1:t)P(s=1∣z1:t)=P(s=0∣zt)P(s=1∣zt)⋅P(s=0∣z1:t−1)P(s=1∣z1:t−1)⋅P(s=1)P(s=0)
一般令先验概率 P ( s = 0 ) = P ( s = 1 ) = 0.5 P\left( s=0 \right) =P\left( s=1 \right) =0.5 P(s=0)=P(s=1)=0.5,引入Logistic变换
L ( p ) = log [ p / ( 1 − p ) ] L\left( p \right) =\log \left[ {{p}/{\left( 1-p \right)}} \right] L(p)=log[p/(1−p)]
则
L ( s ∣ z 1 : t ) = L ( s ∣ z t ) + L ( s ∣ z 1 : t − 1 ) L\left( s|z_{1:t} \right) =L\left( s|z_t \right) +L\left( s|z_{1:t-1} \right) L(s∣z1:t)=L(s∣zt)+L(s∣z1:t−1)
称为栅格状态的更新模型。更新模型中与新测量值 z t z_t zt有关的项是 L ( s ∣ z t ) L\left( s|z_t \right) L(s∣zt),由于激光雷达的测量值只有两种情况,因此定义
{ l o o c c u : L ( s ∣ z t = 1 ) l o f r e e : L ( s ∣ z t = 0 ) \begin{cases} \mathrm{looccu}: L\left( s|z_t=1 \right)\\ \mathrm{lofree}: L\left( s|z_t=0 \right)\\\end{cases} {looccu:L(s∣zt=1)lofree:L(s∣zt=0)
必须指出, l o o c c u \mathrm{looccu} looccu与 l o f r e e \mathrm{lofree} lofree表达了在获得感知数据的情况下栅格真实状态的概率,这是与传感器性能有关的常数。传感器性能越好,测量结果越接近真实值, l o o c c u \mathrm{looccu} looccu越大 l o f r e e \mathrm{lofree} lofree越小。一般地,可以设定 l o o c c u = 0.9 \mathrm{looccu}=0.9 looccu=0.9、 l o f r e e = − 0.7 \mathrm{lofree}=-0.7 lofree=−0.7
2.2 截断策略
从更新模型可以看出, L ( s ∣ z 1 : t ) L\left( s|z_{1:t} \right) L(s∣z1:t)是对历史观测序列的整合。换言之,若假设 ∣ l o o c c u ∣ = ∣ l o f r e e ∣ \left| \mathrm{looccu} \right|=\left| \mathrm{lofree} \right| ∣looccu∣=∣lofree∣,则当一个栅格被观察到 k k k次自由状态后,必须再被观察到至少 k k k次占据状态,才有可能被设置为占据栅格。这导致实际应用时,动态环境中的地图可能无法被快速更新。
为了建图的适应性,采用截断策略,定义概率上下限来限制改变栅格状态所需的更新次数,代价是概率在0-1区间内不再完备,靠近边界的概率丢失
L ( s ∣ z 1 : t ) = max { min { L ( s ∣ z t ) + L ( s ∣ z 1 : t − 1 ) , L max } , L min } L\left( s|z_{1:t} \right) =\max \left\{ \min \left\{ L\left( s|z_t \right) +L\left( s|z_{1:t-1} \right) , L_{\max} \right\} , L_{\min} \right\} L(s∣z1:t)=max{min{L(s∣zt)+L(s∣z1:t−1),Lmax},Lmin}
3 仿真实现
3.1 算法流程
算法流程如下所示
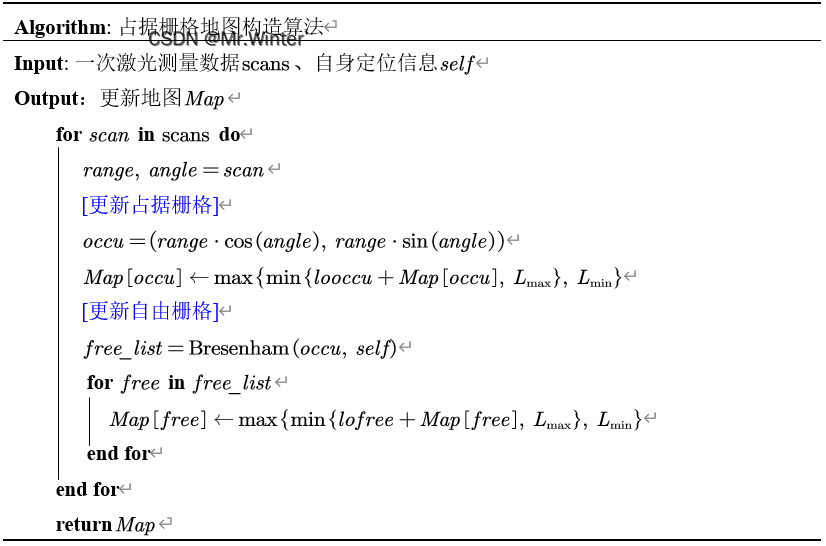
其中关于Bresenham视线法原理,请参考路径规划 | 图解Theta*算法(附ROS C++/Python/Matlab仿真)
3.2 Matlab实现
核心代码如下所示
for i = 1:N x = scan_pose(1, i);y = scan_pose(2, i);theta = scan_pose(3, i);robot_pos = [ceil(x * resolution) + origin(1), ceil(y * resolution) + origin(2)];% Find grids hit by the rays (in the gird map coordinate)rays = scan_ranges(:, i);x_occ = rays .* cos(scan_angles + theta) + x;y_occ = -rays .* sin(scan_angles + theta) + y;occ_pos = [ceil(x_occ * resolution) + origin(1), ceil(y_occ * resolution) + origin(2)];% Find occupied-measurement cells and free-measurement cellsocc_id = sub2ind(size(grid_map), occ_pos(:, 2), occ_pos(:, 1));free = [];for j = 1:scans_num[ix_free, iy_free] = bresenham(robot_pos, occ_pos(j, :)); free = [free; iy_free, ix_free];endfree_id = sub2ind(size(grid_map), free(:, 1), free(:, 2));% Update the log-oddsgrid_map(occ_id) = grid_map(occ_id) + lo_occ;grid_map(free_id) = grid_map(free_id) - lo_free;% Saturate the log-odd valuesgrid_map(grid_map > lo_max) = lo_max;grid_map(grid_map < lo_min) = lo_min;
end

完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …
相关文章:
地图结构 | 图解占据栅格地图原理(附Matlab建图实验)
目录 0 专栏介绍1 栅格地图1.1 应用场景1.2 基本概念 2 占据栅格地图2.1 更新模型2.2 截断策略 3 仿真实现3.1 算法流程3.2 Matlab实现 0 专栏介绍 🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索…...
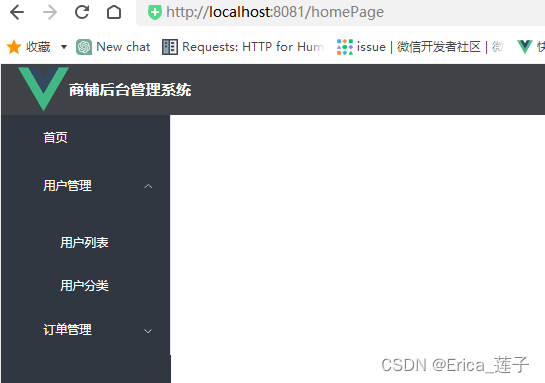
element-plus点击菜单栏全部展开问题解决
这是由子菜单项的index属性引起的,子菜单项的index属性添加相同的值时就会出现这种情况。所以为每个子菜单项添加不同的index属性值就可解决。...

React 简便获取经纬度
以下是关于React获取定位经纬度的代码解释: import React, { useEffect, useState } from react;const LocationComponent () > {const [latitude, setLatitude] useState(null);const [longitude, setLongitude] useState(null);useEffect(() > {navigat…...
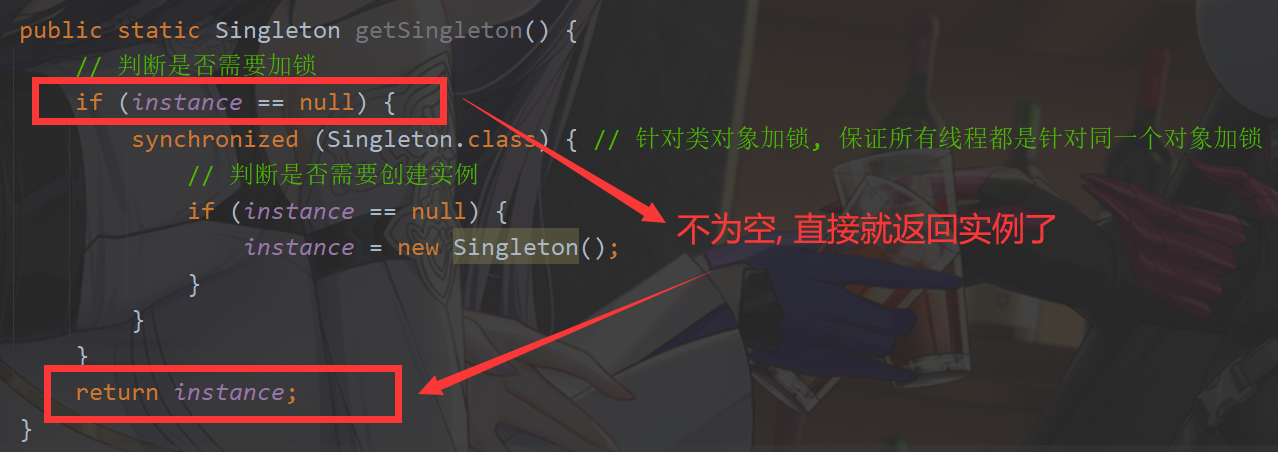
【多线程】线程安全的单例模式
线程安全的单例模式 饿汉模式懒汉模式单线程版多线程版多线程版(改进) 单例模式能保证某个类在程序中只存在 唯一 一份实例, 而不会创建出多个实例,从而节约了资源并实现数据共享。 比如 JDBC 中的 DataSource 实例就只需要一个. 单例模式具体的实现方式, 分成 “饿…...

Competitive Collaboration 论文阅读
论文信息 题目:Competitive Collaboration: Joint Unsupervised Learning of Depth, Camera Motion, Optical Flow and Motion Segmentation 作者:Anurag Ranjan, Varun Jampani, Lukas Balles 来源:CVPR 时间&#x…...
非科班菜鸡算法学习记录 | 代码随想录算法训练营完结!
这俩月终于结束了233333,之后就是反复复习和背八股了吧,然后整整项目春招再投投投,感觉大部分题都有思路了但是做过的题也会没思路,还是要复习 总结 数组: 双指针用的很多,一般一个指向遍历位置࿰…...
C语言实现三字棋
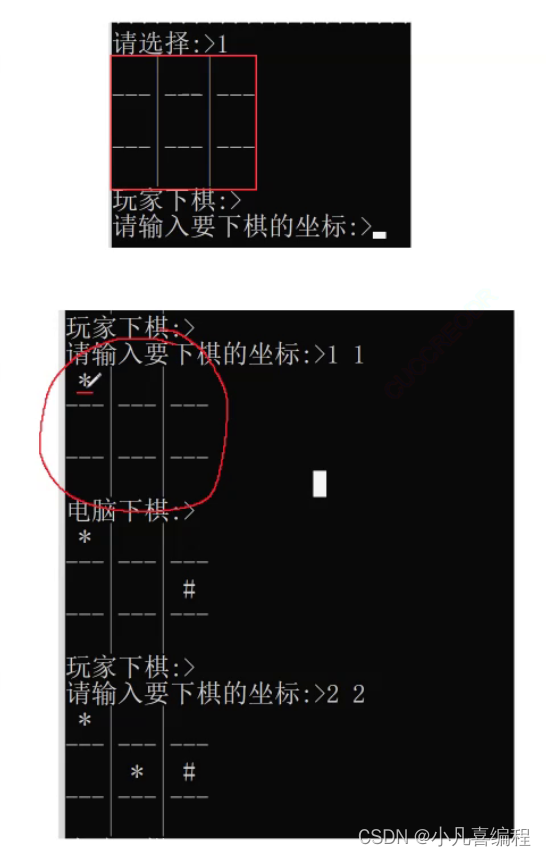
实现以下: 1游戏不退出,继续玩下一把(循环) 2应用多文件的形式完成 test.c. --测试游戏 game.c -游戏函数的实现 game.h -游戏函数的声明 (2)游戏再走的过程中要进行数据的存储,可以使用3*3的二维数组 char bor…...

【LeetCode】35.复杂链表的复制
题目 请实现 copyRandomList 函数,复制一个复杂链表。在复杂链表中,每个节点除了有一个 next 指针指向下一个节点,还有一个 random 指针指向链表中的任意节点或者 null。 示例 1: 输入:head [[7,null],[13,0],[11,4]…...
)
代码大全阅读随笔(五)
数据初始化要点: 数据初始化过程很容易出错,所以请使用本章介绍的方法,来初始化数据,从而避免由于非预期的初始化值而造成的错误。 最小化变量作用域。 使用相同的变量的语句尽可能的集中在一起。 早期绑定会减少灵活性࿰…...

No1.详解【2023年全国大学生数学建模竞赛】C题——蔬菜类商品的自动定价与补货决策(代码 + 详细输出 + 数据集代码 下载)
时间告诉你什么叫衰老,回忆告诉你什么叫幼稚。不要总在过去的回忆里纠缠,昨天的太阳,晒不干今天的衣裳。 🎯作者主页: 追光者♂🔥 🌸个人简介: 💖[1] 计算机专业硕士研究生💖 🌿[2] 2023年城市之星领跑者TOP1(哈尔滨)🌿 🌟[3] 2022年度博客…...
有什么好用的电容笔?apple pencil替代品推荐
近年来,电容笔越来越成为人们日常生活中常见的数码产品之一。电容笔的便捷性得到了消费者的认可。它逐渐取代无纸化书写。那么到底电容笔哪个品牌好呢,电容笔哪一款最好用呢,今天小编给大家总结几款市面好用的电容笔,让我们一起来…...

什么是回调函数?写出一个示例?
聚沙成塔每天进步一点点 ⭐ 专栏简介⭐ 回调函数⭐ 示例⭐ 写在最后 ⭐ 专栏简介 前端入门之旅:探索Web开发的奇妙世界 记得点击上方或者右侧链接订阅本专栏哦 几何带你启航前端之旅 欢迎来到前端入门之旅!这个专栏是为那些对Web开发感兴趣、刚刚踏入前…...

深度学习在医疗保健领域的应用:从图像识别到疾病预测
文章目录 深度学习在医学影像识别中的应用1. 癌症检测2. 病理学图像分析3. 医学图像分割 深度学习在疾病预测中的应用1. 疾病风险预测2. 疾病诊断辅助3. 药物研发 深度学习在个性化治疗中的应用1. 基因组学分析2. 临床数据集成 深度学习在医疗保健中的挑战和未来数据隐私和安全…...

SpringBoot实现自定义environment中的value加密
environment中的value为什么要加密? 未经过加密的配置文件,密码均是采用明文密码,很容易导致信息泄露。 SpringBoot environment中的value加密代码如下 package com.xxx.core.encryption;import com.google.common.collect.Maps; import lomb…...

celery的用法--任务调度
在Celery中,任务(Task)是执行特定操作的基本单元。任务可以异步执行,可以带有参数,可以返回结果,可以链式调用,还可以设置任务优先级、超时等属性。 1.定义任务: 使用app.task装饰器…...
MyBatis-Plus学习笔记总结
一、查询 构造器分为QueryWrapper和LambdaQueryWrapper 创建实体类User package com.system.mybatisplus.model;import com.baomidou.mybatisplus.annotation.IdType; import com.baomidou.mybatisplus.annotation.TableField; import com.baomidou.mybatisplus.annotation.…...

How Language Model Hallucinations Can Snowball
本文是LLM系列文章,针对《How Language Model Hallucinations Can Snowball》的翻译。 语言模型幻觉是如何产生雪球的 摘要1 引言2 为什么我们期待幻觉像滚雪球一样越滚越大?3 实验4 我们能防止雪球幻觉吗?5 相关工作6 结论局限性 摘要 在实…...
autojs修改顶部标题栏颜色
顶部标题栏的名字是statusBarColor 不是toolbar。难怪我搜索半天搜不到 修改之后变成这样了 代码如下: "ui"; importClass(android.view.View); importClass(android.graphics.Color); ui.statusBarColor(Color.parseColor("#ffffff")); ui.…...
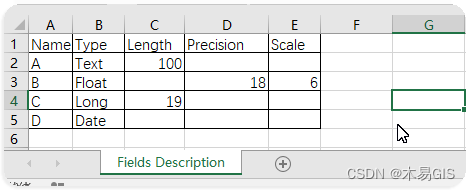
arppy gis 读取text 并批量添加字段 arcpy.AddField_management
arppy gis 读取text 并批量添加字段 arcpy.AddField_management 例:给“省级行政区域”添加“A、B、C、D” 4个字段。 (1)用Excel制作出字段及其描述表,定义字段结构; (2)复制除标题行以为的内…...

Pandas中at、iat函数详解
前言 嗨喽,大家好呀~这里是爱看美女的茜茜呐 at 函数:通过行名和列名来取值(取行名为a, 列名为A的值) iat 函数:通过行号和列号来取值(取第1行,第1列的值) 本文给出at、iat常见的…...

AI Coding如何落地APP开发——从个人玩具到公司级降本增效
一、AI 编程能力如何应用到APP开发团队 每天打开新闻都是各种: AI可以取代程序猿、AI可以独立写页面、AI可以独立完成APP,程序员马上要失业了,一个产品经理半天时间就能生成一个带完整页面的活动模块原型;一个运营人员一个小时就…...
:异步事件总线+快照版本向量的组合拳揭秘)
DeepSeek Saga模式性能压测实录(TPS从1.2K飙升至8.6K):异步事件总线+快照版本向量的组合拳揭秘
更多请点击: https://intelliparadigm.com 第一章:DeepSeek Saga模式性能压测实录(TPS从1.2K飙升至8.6K):异步事件总线快照版本向量的组合拳揭秘 在真实生产级负载下,DeepSeek R1模型启用Saga模式后&#…...

MAX-M8C-0,支持辅助定位的超紧凑GNSS模块
简介今天我要向大家介绍的是 u-blox 的并发GNSS模块——MAX-M8C-0。这是一款专为成本敏感型应用设计、具有超低功耗的超紧凑高性能模块。该模块基于高性能 u-blox M8 GNSS引擎,支持并发接收多达3个GNSS系统(GPS/Galileo GLONASS或BeiDou)&am…...

构建企业级安全运维体系:从SSH堡垒机到自动化管控平台
1. 项目概述:从“GMSSH/GMClaw”看现代远程访问与管理的演进最近在和一些做基础设施和运维的朋友交流时,他们频繁提到一个组合词:“GMSSH/GMClaw”。乍一听,这像是一个内部代号或者某个新工具的名字。深入聊下去才发现,…...

StreamCap:如何一站式解决40+直播平台录制难题?
StreamCap:如何一站式解决40直播平台录制难题? 【免费下载链接】StreamCap Multi-Platform Live Stream Automatic Recording Tool | 多平台直播流自动录制客户端 基于FFmpeg 支持监控/定时/转码 项目地址: https://gitcode.com/gh_mirrors/st/Strea…...

stm32开发者如何快速接入大模型api实现智能对话功能
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 STM32开发者如何快速接入大模型API实现智能对话功能 为嵌入式设备增加自然语言交互能力,是许多STM32开发者希望实现的功…...

轻量级网页自动化工具 xiaoclaw:基于 CDP 的高效实践指南
1. 项目概述:一个轻量级、可编程的网页自动化工具最近在折腾一些需要自动处理网页数据的小项目,比如定时抓取某个网站的价格变动、自动填写表单、或者模拟一些重复性的点击操作。一开始想用传统的Selenium,但总觉得它有点“重”,启…...

从零到一:在VSCode中高效搭建PyQt5开发环境
1. 为什么选择VSCodePyQt5组合? 作为一个常年混迹Python GUI开发的老手,我尝试过各种开发环境组合,最终发现VSCodePyQt5这对搭档特别适合新手入门。PyQt5作为Qt框架的Python绑定,能让你用简单的代码创建专业级桌面应用,…...

图解朱刘算法:用Python手搓最小树形图,搞定有向图最小生成树
图解朱刘算法:用Python手搓最小树形图,搞定有向图最小生成树 在算法学习的道路上,图论算法总是让人又爱又恨。今天我们要探讨的是一个特别的存在——朱刘算法(Chu-Liu/Edmonds Algorithm),它能帮我们解决有…...

Java动态代理终极指南:JDK与CGLIB原理对比详解
Java动态代理终极指南:JDK与CGLIB原理对比详解 【免费下载链接】CodeGuide :books: 本代码库是作者小傅哥多年从事一线互联网 Java 开发的学习历程技术汇总,旨在为大家提供一个清晰详细的学习教程,侧重点更倾向编写Java核心内容。如果本仓库能…...