yolov8 模型部署--TensorRT部署-c++服务化部署
写目录
- yolov8 模型部署--TensorRT部署
- 1、模型导出为onnx格式
- 2、模型onnx格式转engine 部署
yolov8 模型部署–TensorRT部署
1、模型导出为onnx格式
-
如果要用TensorRT部署YOLOv8,需要先使用下面的命令将模型导出为onnx格式:
yolo export model=yolov8n.pt format=onnx -
YOLOv8的3个检测头一共有80x80+40x40+20x20=8400个输出单元格,每个单元格包含x,y,w,h这4项再加80个类别的置信度总共84项内容,所以通过上面命令导出的onnx模型的输出维度为
1x84x8400。 -
模型输出维度

-
这样的通道排列顺序有个问题,那就是后处理的时候会造成内存访问不连续。
-
为了解决这个问题,我们可以修改一下代码,具体做法是把
ultralytics/nn/modules.py文件中的代码做如下修改,交换一下张量y的通道顺序:
def forward(self, x):shape = x[0].shape # BCHWfor i in range(self.nl):x[i] = torch.cat((self.cv2[i](x[i]), self.cv3[i](x[i])), 1)if self.training:return xelif self.dynamic or self.shape != shape:self.anchors, self.strides = (x.transpose(0, 1) for x in make_anchors(x, self.stride, 0.5))self.shape = shapex_cat = torch.cat([xi.view(shape[0], self.no, -1) for xi in x], 2)if self.export and self.format in ('saved_model', 'pb', 'tflite', 'edgetpu', 'tfjs'): # avoid TF FlexSplitV opsbox = x_cat[:, :self.reg_max * 4]cls = x_cat[:, self.reg_max * 4:]else:box, cls = x_cat.split((self.reg_max * 4, self.nc), 1)dbox = dist2bbox(self.dfl(box), self.anchors.unsqueeze(0), xywh=True, dim=1) * self.stridesy = torch.cat((dbox, cls.sigmoid()), 1)# 修改模型输出维度y=y.permute(0,2,1)return y if self.export else (y, x)
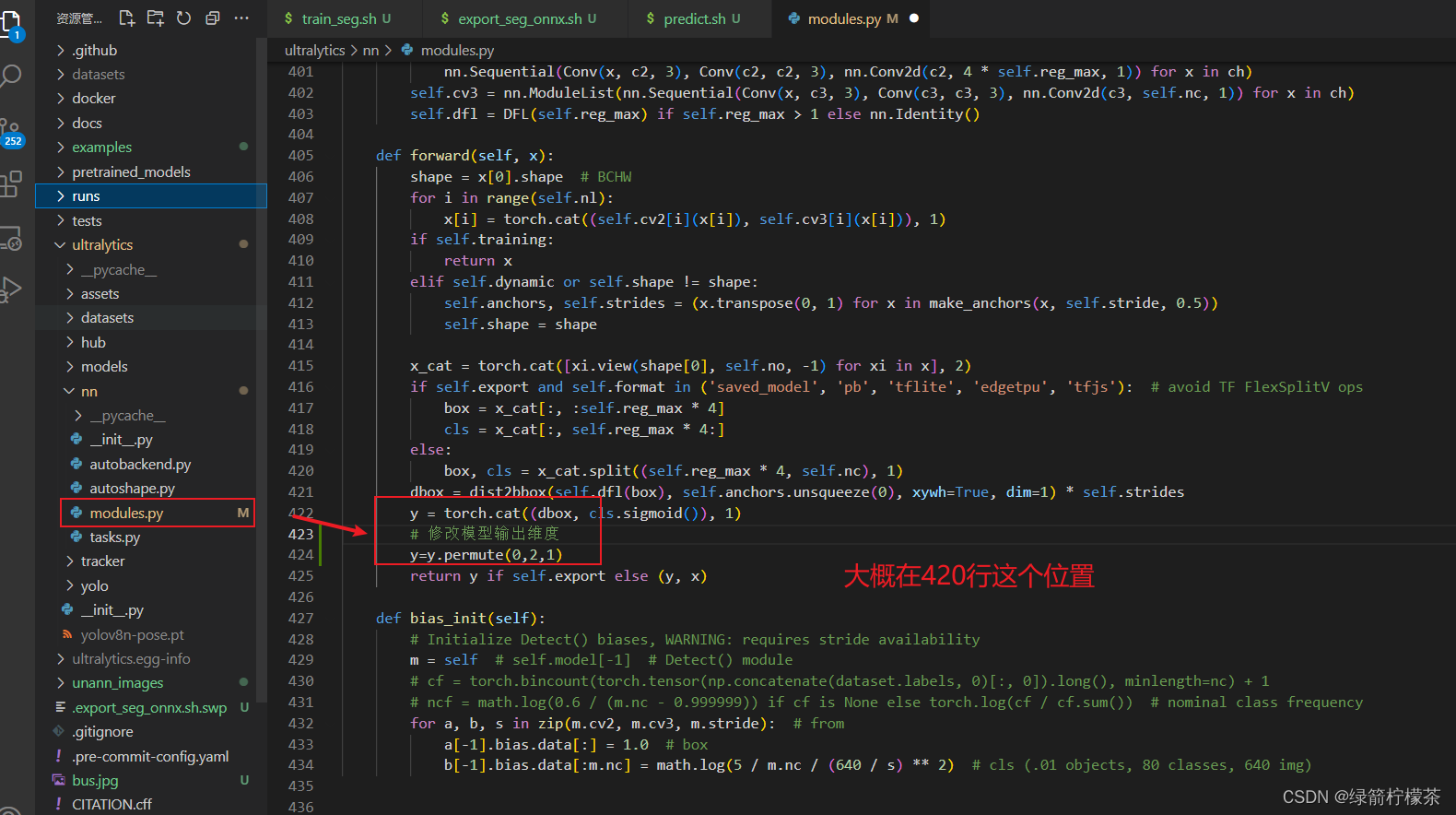
- 这样修改后再执行上面的模型导出命令,模型的输出维度变为
1x8400x84

2、模型onnx格式转engine 部署
- 配置好
TensorRT和NVIDIA环境 - 使用
trtexec转换格式trtexec --onnx=coco/best.onnx --saveEngine=coco/best.onnx.engine --workspace=32 - 模型部署部分代码-c++
#ifndef MyController_hpp #define MyController_hpp#include <ctime> #include <chrono> #include <sstream> #include <iomanip>#include <iostream> #include <numeric> #include <vector>#include "oatpp/web/server/api/ApiController.hpp" #include "oatpp/core/macro/codegen.hpp" #include "oatpp/core/macro/component.hpp"#include "opencv2/opencv.hpp" #include "../dto/DTOs.hpp" // 定义数据格式,用于在不同组件之间传输数据#include "../yoloApp/simple_yolo.hpp" #include "../byteTrackApp/logging.h" #include "../byteTrackApp/BYTETracker.h"// high performance #include "../yoloHighPer/cpm.hpp" #include "../yoloHighPer/infer.hpp" #include "../yoloHighPer/yolo.hpp"# include <dirent.h> # include <sys/types.h> # include <sys/stat.h> # include <unistd.h> # include <stdarg.h>using namespace std; using namespace cv;#include OATPP_CODEGEN_BEGIN(ApiController) //<-- Begin Codegenstatic bool exists(const string& path){#ifdef _WIN32return ::PathFileExistsA(path.c_str()); #elsereturn access(path.c_str(), R_OK) == 0; #endif }static std::vector<std::string> cocolabels = {"car", "excavator", "loader", "dumpTruck", "person" };class InferInstance{ public:InferInstance(std::string onnx_model_path, std::string trt_model_path){onnx_model = onnx_model_path;trt_model = trt_model_path;startup();}bool startup(){// if(!exists(trt_model)){// SimpleYolo::compile(// SimpleYolo::Mode::FP32, // FP32、FP16、INT8// SimpleYolo::Type::V8, // 1, // max batch size// onnx_model, // source // trt_model, // save to// 1 << 30,// "inference"// );// }infer_ = yolo::load(trt_model, yolo::Type::V8);return infer_ != nullptr;}int inference(const Mat& image_input, yolo::BoxArray& boxarray){if(infer_ == nullptr){// INFOE("Not Initialize.");return 1;}if(image_input.empty()){// INFOE("Image is empty.");return 1;}boxarray = infer_->forward(cvimg(image_input));return 0;}private:yolo::Image cvimg(const cv::Mat &image) { return yolo::Image(image.data, image.cols, image.rows);}private:std::string onnx_model = "best.onnx";std::string trt_model = "best.onnx.engine";shared_ptr<yolo::Infer> infer_; };/// std::string onnx_model = "coco/best.onnx"; std::string engine_label = "coco/best.onnx.engine"; std::unique_ptr<InferInstance> infer_instance1(new InferInstance(onnx_model, engine_label));int frame_rate = 10; int track_buffer = 30; std::unique_ptr<BYTETracker> tracker_instance1(new BYTETracker(frame_rate, track_buffer));////*** 建议使用 Api 控制器,而不是使用裸 HttpRequestHandler 为每个新端点创建新的请求处理程序。* API 控制器通过为您生成样板代码,使添加新端点的过程变得更加容易。 它还有助于组织您的端点,* 将它们分组到不同的 API 控制器中。*//*** Sample Api Controller.*/ class MyController : public oatpp::web::server::api::ApiController { protected:/*** Constructor with object mapper.* @param objectMapper - default object mapper used to serialize/deserialize DTOs.*/MyController(const std::shared_ptr<ObjectMapper>& objectMapper): oatpp::web::server::api::ApiController(objectMapper){}public: static std::shared_ptr<MyController> createShared(OATPP_COMPONENT(std::shared_ptr<ObjectMapper>, objectMapper)){return std::shared_ptr<MyController>(new MyController(objectMapper));}// TODO Insert Your endpoints here !!!/--data--// 多目标追踪ENDPOINT_ASYNC("POST", "/car1", tracker1){ENDPOINT_ASYNC_INIT(tracker1)Action act() override {return request->readBodyToStringAsync().callbackTo(&tracker1::returnResponse);}Action returnResponse(const oatpp::String& body_){auto response = tracker_inference(*infer_instance1, *tracker_instance1, body_, controller);return _return(response);}};//public:// 多目标追踪static std::shared_ptr<OutgoingResponse> tracker_inference(InferInstance& infer_, BYTETracker& track_infer, std::string body_, auto* controller){auto base64Image = base64_decode(body_);if(base64Image.empty()){return controller->createResponse(Status::CODE_400, "The image is empty!");}std::vector<char> base64_img(base64Image.begin(), base64Image.end());cv::Mat image = cv::imdecode(base64_img, 1);// 获取程序开始时间点auto start_time = std::chrono::high_resolution_clock::now();// 推理yolo::BoxArray boxarray;CV_Assert(0 == infer_.inference(image, boxarray));// 获取程序结束时间点auto end_time = std::chrono::high_resolution_clock::now();// 计算运行时间auto duration = std::chrono::duration_cast<std::chrono::milliseconds>(end_time - start_time);// 打印运行时间(以微秒为单位)// std::cout << "程序运行时间: " << duration.count() << " 毫秒" << std::endl;// 结果处理vector<Objects> objects;objects.resize(boxarray.size());int index = 0;for(auto& box : boxarray) {objects[index].rect.x = box.left;;objects[index].rect.y = box.top;objects[index].rect.width = box.right - box.left;objects[index].rect.height = box.bottom - box.top;objects[index].prob = box.confidence;objects[index].label = box.class_label;index++;std::cout << "left: " << box.left << ", top: " << box.top<< ", right: " << box.right << ", bottom: " << box.bottom<< ", confidence: " << box.confidence << ", class_label: " << box.class_label << std::endl;}auto yoloDto = TrackYoloDto::createShared();auto boxList = TrackBoxList::createShared();std::vector<STrack> output_stracks = track_infer.update(objects);for (int i = 0; i < output_stracks.size(); i++){auto trackBoxDto = TrackerBboxes::createShared();vector<float> tlwh = output_stracks[i].tlwh; // 方框的位置trackBoxDto->class_id = cocolabels[output_stracks[i].class_id];trackBoxDto->track_id = output_stracks[i].track_id;trackBoxDto->x = tlwh[0];trackBoxDto->y = tlwh[1];trackBoxDto->width = tlwh[2];trackBoxDto->height = tlwh[3];boxList->push_back(trackBoxDto);}output_stracks.clear();yoloDto->data = boxList;yoloDto->status = "successful";yoloDto->time = currentDateTime();return controller->createDtoResponse(Status::CODE_200, yoloDto);}static std::string currentDateTime(){auto now = std::chrono::system_clock::now();auto now_c = std::chrono::system_clock::to_time_t(now);auto now_ms = std::chrono::duration_cast<std::chrono::milliseconds>(now.time_since_epoch()) % 1000;std::stringstream ss;ss << std::put_time(std::localtime(&now_c), "%Y-%m-%d %H:%M:%S") << '.' << std::setfill('0') << std::setw(3) << now_ms.count();return ss.str();}static unsigned char from_b64(unsigned char ch){/* Inverse lookup map */static const unsigned char tab[128] = {255, 255, 255, 255,255, 255, 255, 255, /* 0 */255, 255, 255, 255,255, 255, 255, 255, /* 8 */255, 255, 255, 255,255, 255, 255, 255, /* 16 */255, 255, 255, 255,255, 255, 255, 255, /* 24 */255, 255, 255, 255,255, 255, 255, 255, /* 32 */255, 255, 255, 62,255, 255, 255, 63, /* 40 */52, 53, 54, 55,56, 57, 58, 59, /* 48 */60, 61, 255, 255,255, 200, 255, 255, /* 56 '=' is 200, on index 61 */255, 0, 1, 2,3, 4, 5, 6, /* 64 */7, 8, 9, 10,11, 12, 13, 14, /* 72 */15, 16, 17, 18,19, 20, 21, 22, /* 80 */23, 24, 25, 255,255, 255, 255, 255, /* 88 */255, 26, 27, 28,29, 30, 31, 32, /* 96 */33, 34, 35, 36,37, 38, 39, 40, /* 104 */41, 42, 43, 44,45, 46, 47, 48, /* 112 */49, 50, 51, 255,255, 255, 255, 255, /* 120 */};return tab[ch & 127];}static std::string base64_decode(const std::string& base64){if(base64.empty())return "";int len = base64.size();auto s = (const unsigned char*)base64.data();unsigned char a, b, c, d;int orig_len = len;int dec_len = 0;string out_data;auto end_s = s + base64.size();int count_eq = 0;while(*--end_s == '='){count_eq ++;}out_data.resize(len / 4 * 3 - count_eq);char *dst = const_cast<char*>(out_data.data());char *orig_dst = dst;while (len >= 4 && (a = from_b64(s[0])) != 255 &&(b = from_b64(s[1])) != 255 && (c = from_b64(s[2])) != 255 &&(d = from_b64(s[3])) != 255) {s += 4;len -= 4;if (a == 200 || b == 200) break; /* '=' can't be there */*dst++ = a << 2 | b >> 4;if (c == 200) break;*dst++ = b << 4 | c >> 2;if (d == 200) break;*dst++ = c << 6 | d;}dec_len = (dst - orig_dst);// dec_len必定等于out_data.size()return out_data;} };#include OATPP_CODEGEN_END(ApiController) //<-- End Codegen#endif /* MyController_hpp */ - 启动模型
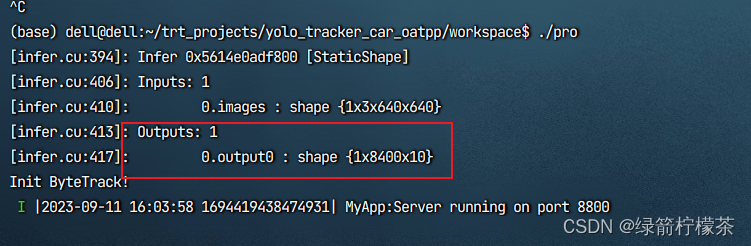
- 请求接口进行推理
yolov8 模型部署测试
相关文章:
yolov8 模型部署--TensorRT部署-c++服务化部署
写目录 yolov8 模型部署--TensorRT部署1、模型导出为onnx格式2、模型onnx格式转engine 部署 yolov8 模型部署–TensorRT部署 1、模型导出为onnx格式 如果要用TensorRT部署YOLOv8,需要先使用下面的命令将模型导出为onnx格式: yolo export modelyolov8n.p…...
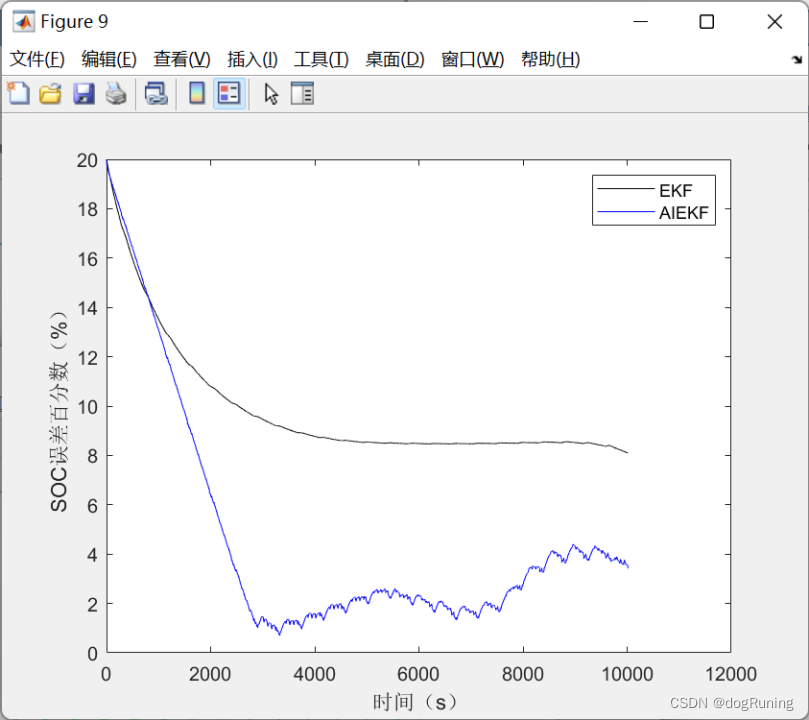
自适应迭代扩展卡尔曼滤波算法AIEKF估计SOC VS 扩展卡尔曼估计SOC
自适应迭代扩展卡尔曼滤波算法(AIEK) 自适应迭代扩展卡尔曼滤波算法(AIEK)是一种滤波算法,其目的是通过迭代过程来逐渐适应不同的状态和环境,从而优化滤波效果。 该算法的基本思路是在每一步迭代过程中&a…...

2023-亲测有效-git clone失败怎么办?用代理?加git?
git 克隆不下来,超时 用以下格式: git clone https://ghproxy.com/https://github.com/Tencent/ncnn.git 你的网站前面加上 https://ghproxy.com/ 刷的一下就下完了!!...

An Empirical Study of GPT-3 for Few-Shot Knowledge-Based VQA
本文是LLM系列文章,针对《An Empirical Study of GPT-3 for Few-Shot Knowledge-Based VQA》的翻译。 GPT-3对基于小样本知识的VQA的实证研究 摘要引言相关工作方法OK-VQA上的实验VQAv2上的实验结论 摘要 基于知识的视觉问答(VQA)涉及回答需…...
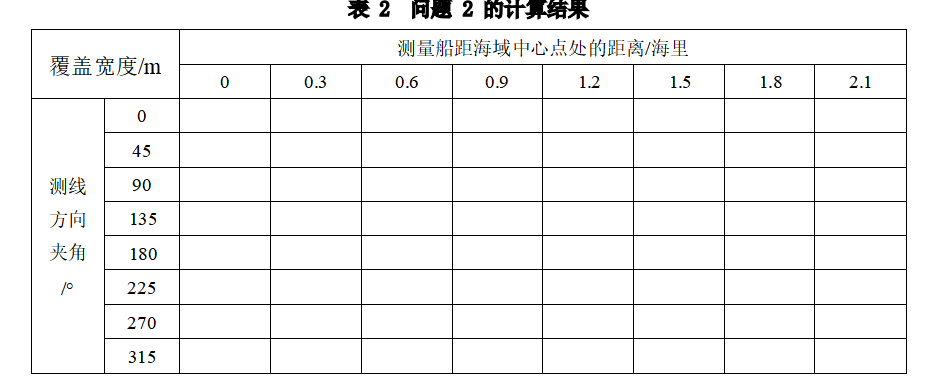
2023高教社杯数学建模B题思路分析 - 多波束测线问题
# 1 赛题 B 题 多波束测线问题 单波束测深是利用声波在水中的传播特性来测量水体深度的技术。声波在均匀介质中作匀 速直线传播, 在不同界面上产生反射, 利用这一原理,从测量船换能器垂直向海底发射声波信 号,并记录从声波发射到…...

02-docker network
Docker网络 Docker网络是什么 Docker 网络是 Docker 容器之间进行通信和连接的网络环境。在 Docker 中,每个容器都有自己的网络命名空间,这意味着每个容器都有自己的网络接口、IP 地址和网络配置 Docker网络启动后,会在宿主机中建立一个名…...

栈和队列经典笔试题
文章目录 栈和队列的回顾💻栈🩳队列👟 栈和队列经典笔试题🔋有效的括号🎸用队列实现栈 🕯用栈实现队列🔭设计循环队列🧼 安静的夜晚 你在想谁吗 栈和队列的回顾💻 栈&am…...

No5.9:多边形内角和公式
#!/usr/bin/python # -*- coding: UTF-8 -*-#指定了编码,中文就能正常展示 # codingutf-8def calc_degree(n):#n代表边形的总数degree (n - 2) * 180#多边形内角和公式return degreeprint(calc_degree(3))#三角形的内角和 print(calc_degree(4))#四边形的内角和【小…...
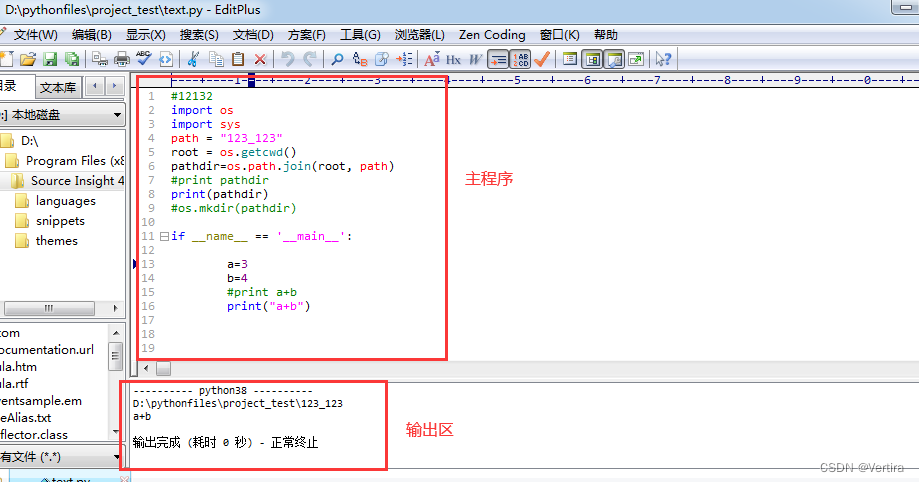
EditPlus 配置python 及Anaconda中的python
若不是pycharm vscode 太大,太占内存,谁会想到用Notepad,EdirPlus 配置python呢!!! 话不多说,首先你自己安装好EditPlus。开始 菜单栏 选择 工具 -> 配置自定义工具 组名:python 命令:d:\*…...

linux 编译 llvm + clang
1. 需要下载以下三个压缩包,下载源码:Release LLVM 15.0.7 llvm/llvm-project GitHub clang-15.0.7.src.tar.xzcmake-15.0.7.src.tar.xzllvm-15.0.7.src.tar.xz 2. 解压后将 clang 源码放入 llvm/tools/ 下 3. 将解压后的 cmake-15.0.7…...
Mybatis 框架 ( 四 ) QueryWrapper
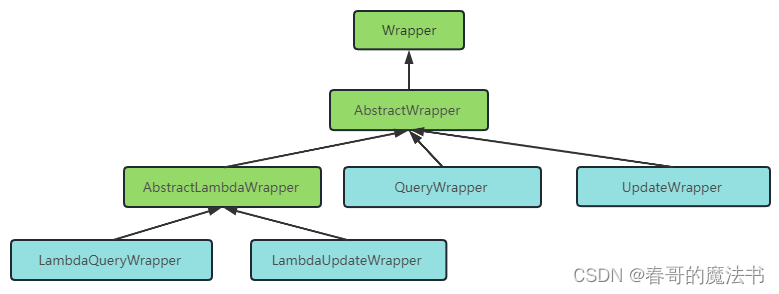
4.5.Wrapper条件构造器 Wrapper : 条件构造抽象类,最顶端父类 AbstractWrapper : 用于查询条件封装,生成 sql 的 where 条件 QueryWrapper : Entity 对象封装操作类,不是用lambda语法 UpdateWrapper &am…...

数据结构和算法之二分法查找
二分法查找,也称作二分查找或折半查找,是一种在有序数组中快速查找特定元素的算法。它采用分治法思想,通过将问题划分为规模更小的子问题,并且通过对子问题的查找来解决原问题。 二分法查找的思路是不断地将数组一分为二…...

系统日期如何在页面展示,框架是react或者vue3
安装插件dayjs或者moment.js 2.使用setInterval(useInterval)或者requestAnimationFrame react项目中useInterval的代码示例: import React, {useState } from react; import { useInterval } from "ahooks"; import moment fro…...

(二十二)大数据实战——Flume数据采集之故障转移案例实战
前言 本节内容我们完成Flume数据采集的故障转移案例,使用三台服务器,一台服务器负责采集nc数据,通过使用failover模式的Sink处理器完成监控数据的故障转移,使用Avro的方式完成flume之间采集数据的传输。整体架构如下:…...

前端小案例3:Flex弹性布局行内元素宽度自适应
前端小案例3:Flex弹性布局行内元素宽度自适应 项目背景:需要在一行上展示空调设备的三个模式(制冷、制热、通风)或者两个模式(制冷、制热);因为不同产品的模式数量不同,因此需要让模…...
纳尼?小说还要用看的?这可以听!无广!
这是一款听书软件,可以自定义书源,自己设置书架,页面简单易操作,无广告。 支持直接搜索书名,链接,图文,本地文件等方式听书 拥有30多主播声音,分类细致 支持倍速、添加BGM等...

【微服务部署】四、Jenkins一键打包部署NodeJS(Vue)前端项目步骤详解
本文介绍使用Jenkins一键将NodeJS(Vue)前端项目打包并上传到生产环境服务器,这里使用的是直接打包静态页面,发送到远程服务器Nginx配置目录的方式,首先确保服务器环境配置好,安装Nginx,运行目录…...
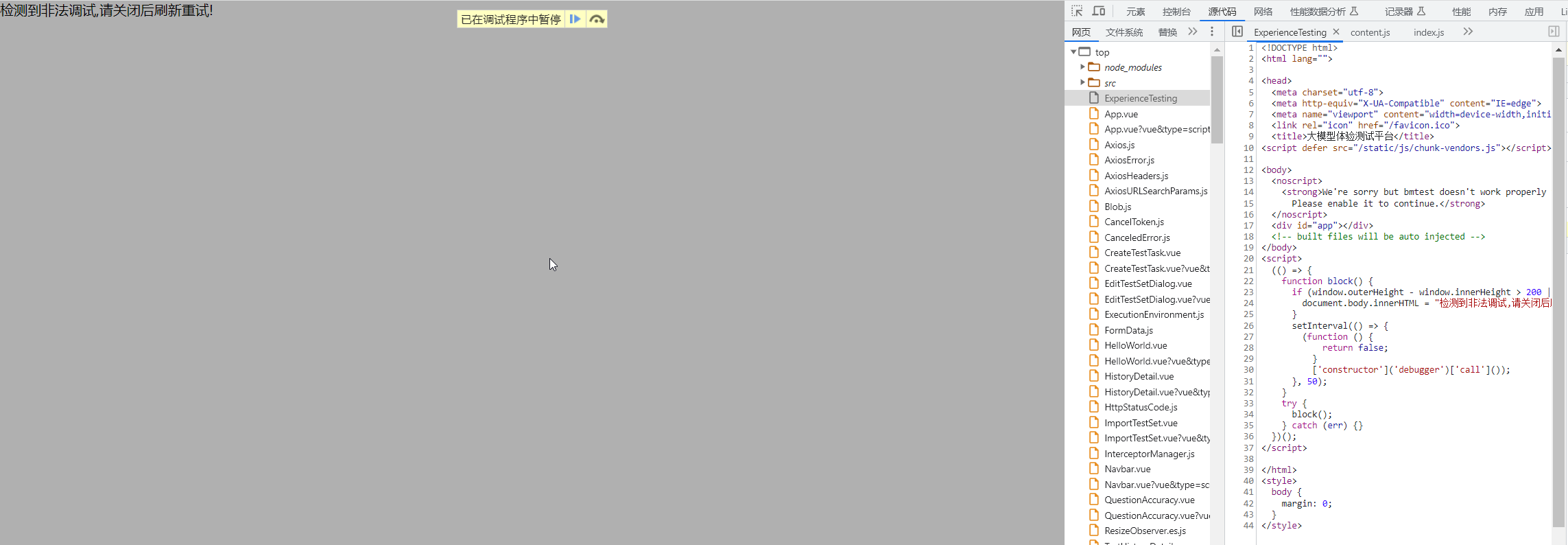
【前端】禁止别人调试自己的前端页面代码
无限debugger 前端页面防止调试的方法主要是通过不断 debugger 来疯狂输出断点,因为 debugger 在控制台被打开的时候就会执行由于程序被 debugger 阻止,所以无法进行断点调试,所以网页的请求也是看不到的代码如下: /** * 基础禁止…...

UDP的可靠性传输
UDP系列文章目录 第一章 UDP的可靠性传输-理论篇(一) 第二章 UDP的可靠性传输-理论篇(二) 文章目录 UDP系列文章目录前言1.TCP 和UDP格式对比2.UDP分片原理3.UDP 传输层应该注意问题4.MTU5.UDP 分片机制设计重点 一、ARQ协议什么…...

科研笔记:TPAMI submission guideline
1 author information Author Information - IEEE Transactions on Pattern Analysis and Machine Intelligence | IEEE Computer Society Digital Library 1.1 会议期刊extension 当一个TPAMI的提交基于之前的会议论文时,IEEE要求期刊论文是之前出版物的“实质…...

Shell脚本工程化:great.sh框架解决运维脚本可维护性难题
1. 项目概述:一个被低估的Shell脚本构建框架如果你和我一样,常年混迹在运维、DevOps或者后端开发领域,那么对Shell脚本的感情一定是复杂的。一方面,它是我们最趁手的“瑞士军刀”,从服务器初始化、日志分析到自动化部署…...

【统计推断实战】从置信区间到假设检验:如何用数据做出可靠决策
1. 从产品迭代案例看统计推断的价值 最近团队上线了一个新功能,产品经理信心满满地宣称能提升15%的用户留存率。但上线一周后数据波动很大,有人觉得效果明显,有人却说毫无变化。这时候该信谁的?其实这就是统计推断大显身手的时刻—…...

基于Arduino Pro Micro的薄膜键盘矩阵改造:DIY低成本模拟飞行外设
1. 项目概述:为Falcon BMS打造一款经济型多功能按键面板如果你是一名《Falcon BMS》的飞行模拟爱好者,同时又对硬件DIY抱有热情,那么你很可能和我一样,对市面上那些动辄数百甚至上千元的专业模拟飞行外设感到望而却步。尤其是像F-…...

终极网盘直链下载助手完整指南:免费解锁八大平台高速下载
终极网盘直链下载助手完整指南:免费解锁八大平台高速下载 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天…...

在Android Termux中部署轻量级Docker环境:原理、部署与实战指南
1. 项目概述与核心价值最近在折腾移动设备上的开发环境,发现一个挺有意思的项目:George-Seven/Termux-Udocker。简单来说,它是在Android平台的Termux终端模拟器里,实现一个轻量级的、用户空间(User-Space)的…...

3PEAK思瑞浦 TPA3532-VS1R MSOP8 运算放大器
特性 超低输入偏置电流: -在TA25C时最大士1pA(实验室测试限值) 安 -在-40C至125C(实验室测试限值)下,最大30皮 低输入失调电压:250V(最大值) 集成保护缓冲器,最大偏移电压为200V 低电压噪声密度:18nV/vHz(在1kHz时) 宽带宽:2.1MHz 供电电压:4.5V至16V(2.…...

Sora 2正式版突然开放API灰度权限?我们逆向解析了127行响应头与rate limit策略,发现3个隐藏调用阈值
更多请点击: https://intelliparadigm.com 第一章:Sora 2正式版核心能力与架构演进 Sora 2正式版标志着视频生成大模型从研究原型迈向工业级部署的关键跃迁。其底层架构采用分层时空联合建模(Hierarchical Spatio-Temporal Transformer&…...

实验记录-农药种衣剂
1.显色度取决于种子颗粒大小,种子越大,则显色越差;2.需加入增稠剂...

Encounter/Innovus GIFT TCL 脚本流程索引清单
目录 一、 布局阶段 (Placement) 二、 布线阶段 (Routing) 三、 时序阶段 (Timing) 四、 电源阶段 (Power) 五、 IO 与端口处理 六、 调试与辅助工具 一、 布局阶段 (Placement) 脚本名称 核心用途 调用场景 userAddAllHInsts.tcl 为源模块中的每个扇出添加缓冲器 解决高扇…...

嵌入式开发实战:从ADC纹波故障看系统集成调试与EMC设计
1. 项目背景与问题缘起:当“新”设备遭遇“老”问题在工业设备开发领域,尤其是像线锯这类集精密机械、复杂电气和嵌入式软件于一体的复杂系统,有一个经典且令人头疼的场景:一款经过验证的成熟产品平台,在衍生出新机型或…...