C++数据结构--红黑树
目录
- 一、红黑树的概念
- 二、红黑树的性质
- 三、红黑树的节点的定义
- 四、红黑树结构
- 五、红黑树的插入操作
- 参考代码
- 五、代码汇总
一、红黑树的概念
红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black。 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路
径会比其他路径长出俩倍,因而是接近平衡的。如图所示:

二、红黑树的性质
- 每个结点不是红色就是黑色。
- 根节点是黑色的。
- 如果一个节点是红色的,则它的两个孩子结点是黑色的。
- 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均 包含相同数目的黑色结点。
- 每个叶子结点都是黑色的(此处的叶子结点指的是空结点)。
问题:为什么满足上面的性质,红黑树就能保证:其最长路径中节点个数不会超过最短路径节点个数的两倍?
因为根节点是黑色是固定的,并且不能有连续的红色节点,每条路径黑色节点的个数一样,也就是说最短路就是全黑,最长路径就是一黑一红相间,所以一条路径的红色节点要么和黑色节点一样多,要么少于黑色节点,即同一条路径黑色节点的占比是大于等于50%的,所以最长路径一定不超过最短路径的2倍。
三、红黑树的节点的定义
//通过枚举定义红色和黑色的常量enum Colour{RED,BLACK};template <class K,class V>struct RBTreeNode{public://红黑树存放的值pair<K, V> _kv;//节点的三叉链指针RBTreeNode<K,V>* _left;RBTreeNode<K,V>* _right;RBTreeNode<K,V>* _parent;//节点的颜色Colour _col;//构造函数RBTreeNode(const pair<K, V>& kv):_kv(kv), _left(nullptr), _right(nullptr), _parent(nullptr), _col(RED){}};
思考:在节点的定义中,为什么要将节点的默认颜色给成红色的?
这个问题就是关于插入节点的时候我们默认插入的是黑色的节点还是红色的节点了,根据红黑树的规则,每一条路径的黑色节点的个数是一样的,假如我们插入黑色节点,那么某条路径的黑色节点就多了一个,也就是说其它路径的黑色节点也要增加一个,但是我们只插入了一个节点,要令其它路径的黑色节点的数量都增加一个,这个操作的难度显然是很大的,但是如果我们默认插入一个红色节点,那么我们最多违反了根节点为黑色或者连续两个红色节点的规则,主要还是容易违反连续两个红色节点的规则,这个问题只会影响当前节点到祖先这条路径,不会影响其他路径的节点,所以处理起来会更简洁一些,所以我们默认插入的节点是红色的。
四、红黑树结构

五、红黑树的插入操作
红黑树是在二叉搜索树的基础上加上其平衡限制条件,因此红黑树的插入可分为两步:
- 按照二叉搜索树的规则插入新节点。
- 检测新节点插入后,红黑树的性质是否遭到破坏,如果是,就要通过变色加旋转操作维持红黑树的性质。
因为新节点的默认颜色是红色,因此:如果其双亲节点的颜色是黑色,没有违反红黑树任何性质,则不需要调整;但当新插入节点的双亲节点颜色为红色时,就违反了性质三不能有连在一起的红色节点,此时需要对红黑树分情况来讨论:
约定:cur为当前节点,p为父节点,g为祖父节点,u为叔叔节点。
情况一: cur为红,p为红,g为黑,u存在且为红。
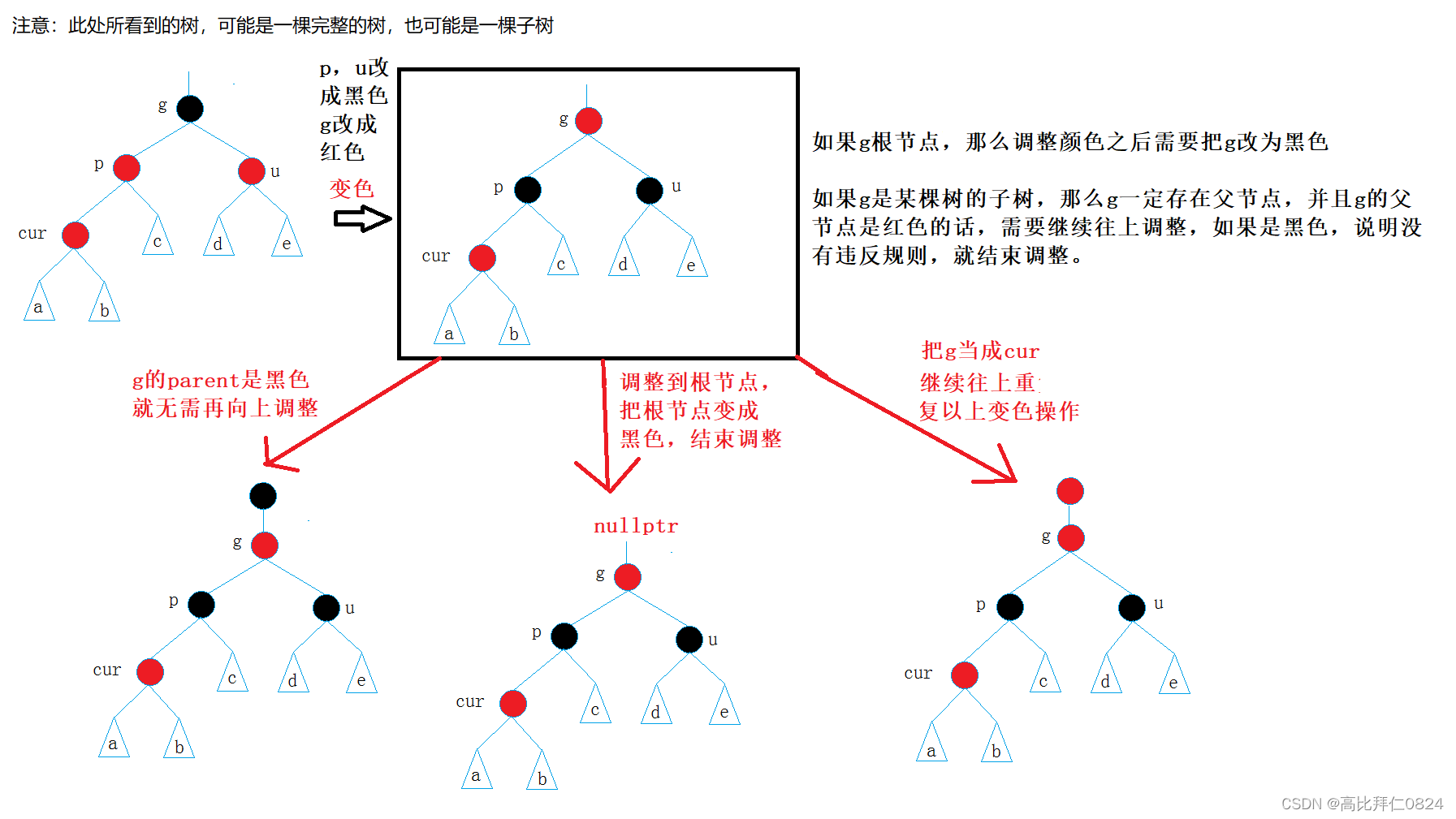
情况二: cur为红,p为红,g为黑,u不存在/u存在且为黑。
因为旋转后需要把p变成黑色,所以p节点和p的父节点不能再出现连续两个红色节点,所以旋转+变色后就不用再沿祖先路径更新了。

情况一:

情况二:

情况三:

情况四:

参考代码
bool Insert(const pair<K, V>& kv){//如果是空树,那么就直接插入一个黑色节点做根即可//注意要改颜色,因为节点的颜色默认是红色的if (_root == nullptr){_root = new Node(kv);_root->_col = BLACK;return true;}//根据二叉搜索树的规则插入节点,同时记录父节点Node* parent = nullptr;Node* cur = _root;while (cur){if (kv.first < cur->_kv.first){parent = cur;cur = cur->_left;}else if (kv.first > cur->_kv.first){parent = cur;cur = cur->_right;}else{return false;}}cur = new Node(kv);if (kv.first < parent->_kv.first){parent->_left = cur;cur->_parent = parent;}else if (kv.first > parent->_kv.first){parent->_right = cur;cur->_parent = parent;}//走到这里已经插入完成,后面是检查新插入的节点有没有破坏红黑树的规则的逻辑//检查新插入的节点是否满足红黑树的规则,如果不满足就要进行变色/变色+旋转//因为新插入的cur节点的颜色一定是红色的,当cur的父节点存在并且为红色//时说明出现了连续的两个红色节点,这时需要进行变色/变色+旋转,如果父节点// 不存在或者存在且为黑色时就无需再处理了。// 为什么父节点有可能不存在?因为这是一个循环,循环更新往祖先处理可能到达根节点,//到了根节点就无需再处理了while (parent && parent->_col == RED){Node* grandfather = parent->_parent;if (parent == grandfather->_left){Node* uncle = grandfather->_right;if (cur == parent->_left){// grandfather// parent//cur//画图//叔叔存在且为红if (uncle && uncle->_col == RED){//变色parent->_col = BLACK;uncle->_col = BLACK;grandfather->_col = RED;//继续沿祖先路径检查cur = grandfather;parent = cur->_parent;//这里曾经漏写了}//叔叔不存在或者存在且为黑else//(uncle==nullptr||uncle->_col==BLACK){//单纯的左边高,进行右单旋+变色RotateR(grandfather);grandfather->_col = RED;parent->_col = BLACK;//旋转完之后无需再沿祖先路径处理break;}}else//cur == parent->_right{// grandfather// parent// cur//画图//叔叔存在且为红if (uncle && uncle->_col == RED){//变色parent->_col = BLACK;uncle->_col = BLACK;grandfather->_col = RED;//继续往上调整cur = grandfather;parent = cur->_parent;//这里曾经忘记写}//叔叔不存在或者存在且为黑else//(uncle==nullptr || uncle->_col == BLACK){//左右双旋RotateL(parent);RotateR(grandfather);//变色grandfather->_col = RED;cur->_col = BLACK;//旋转后就无需再沿祖先路径检查了,具体原因画图理解break;}}}else//(parent == grandfather->_right){Node* uncle = grandfather->_left;if (cur == parent->_right){// grandfather// parent// cur//画图//叔叔存在且为红if (uncle && uncle->_col == RED){//变色parent->_col = BLACK;uncle->_col = BLACK;grandfather->_col = RED;//继续沿祖先路径检查cur = grandfather;parent = cur->_parent;}//叔叔不存在或者存在且为黑else//(uncle==nullptr || uncle->_col == BLACK){//单纯的右边高,进行左单旋+变色RotateL(grandfather);grandfather->_col = RED;parent->_col = BLACK;//旋转+变色后就不需要再沿祖先路径检查了break;}}else//(cur == parent->_left){// grandfather// parent// cur//叔叔存在且为红if (uncle && uncle->_col == RED){//变色parent->_col = BLACK;uncle->_col = BLACK;grandfather->_col = RED;//继续沿祖先路径检查cur = grandfather;parent = cur->_parent;}//叔叔不存在或者存在且为黑else//(uncle==nullptr || uncle->_col == BLACK){//根据模型可知需要右左双旋+变色RotateR(parent);RotateL(grandfather);grandfather->_col = RED;cur->_col = BLACK;//旋转后就不需要再沿祖先路径检查了break;}}}}_num++;//最后记得把根节点的颜色改成黑色_root->_col = BLACK;return true;}//旋转的细节如果不清楚的话请看上一篇关于AVL树的旋转,红黑树的旋转和AVL树的旋转是一样的void RotateL(Node* parent){assert(parent);Node* cur = parent->_right;Node* curleft = cur->_left;Node* parentParent = parent->_parent;parent->_right = curleft;cur->_left = parent;if (curleft){curleft->_parent = parent;}parent->_parent = cur;if (parent == _root){_root = cur;cur->_parent = nullptr;}else{if (parent == parentParent->_left){parentParent->_left = cur;}else{parentParent->_right = cur;}cur->_parent = parentParent;}}void RotateR(Node* parent){assert(parent);Node* cur = parent->_left;Node* curright = cur->_right;Node* parentParent = parent->_parent;parent->_left = curright;cur->_right = parent;if (curright){curright->_parent = parent;}parent->_parent = cur;if (parent == _root){_root = cur;cur->_parent = nullptr;}else{if (parent == parentParent->_left){parentParent->_left = cur;}else{parentParent->_right = cur;}cur->_parent = parentParent;}}
五、代码汇总
#pragma once#include <iostream>
using namespace std;
#include <assert.h>namespace kb
{enum Colour{RED,BLACK};template <class K,class V>struct RBTreeNode{public://红黑树存放的值pair<K, V> _kv;//节点的三叉链指针RBTreeNode<K,V>* _left;RBTreeNode<K,V>* _right;RBTreeNode<K,V>* _parent;//节点的颜色Colour _col;//构造函数RBTreeNode(const pair<K, V>& kv):_kv(kv), _left(nullptr), _right(nullptr), _parent(nullptr), _col(RED){}};template <class K,class V>class RBTree{typedef RBTreeNode<K, V> Node;public:bool Insert(const pair<K, V>& kv){//如果是空树,那么就直接插入一个黑色节点做根即可//注意要改颜色,因为节点的颜色默认是红色的if (_root == nullptr){_root = new Node(kv);_root->_col = BLACK;return true;}//根据二叉搜索树的规则插入节点,同时记录父节点Node* parent = nullptr;Node* cur = _root;while (cur){if (kv.first < cur->_kv.first){parent = cur;cur = cur->_left;}else if (kv.first > cur->_kv.first){parent = cur;cur = cur->_right;}else{return false;}}cur = new Node(kv);if (kv.first < parent->_kv.first){parent->_left = cur;cur->_parent = parent;}else if (kv.first > parent->_kv.first){parent->_right = cur;cur->_parent = parent;}//走到这里已经插入完成,后面是检查新插入的节点有没有破坏红黑树的规则的逻辑//检查新插入的节点是否满足红黑树的规则,如果不满足就要进行变色/变色+旋转//因为新插入的cur节点的颜色一定是红色的,当cur的父节点存在并且为红色//时说明出现了连续的两个红色节点,这时需要进行变色/变色+旋转,如果父节点// 不存在或者存在且为黑色时就无需再处理了。// 为什么父节点有可能不存在?因为这是一个循环,循环更新往祖先处理可能到达根节点,//到了根节点就无需再处理了while (parent && parent->_col == RED){Node* grandfather = parent->_parent;if (parent == grandfather->_left){Node* uncle = grandfather->_right;if (cur == parent->_left){// grandfather// parent//cur//画图//叔叔存在且为红if (uncle && uncle->_col == RED){//变色parent->_col = BLACK;uncle->_col = BLACK;grandfather->_col = RED;//继续沿祖先路径检查cur = grandfather;parent = cur->_parent;//这里曾经漏写了}//叔叔不存在或者存在且为黑else//(uncle==nullptr||uncle->_col==BLACK){//单纯的左边高,进行右单旋+变色RotateR(grandfather);grandfather->_col = RED;parent->_col = BLACK;//旋转完之后无需再沿祖先路径处理break;}}else//cur == parent->_right{// grandfather// parent// cur//画图//叔叔存在且为红if (uncle && uncle->_col == RED){//变色parent->_col = BLACK;uncle->_col = BLACK;grandfather->_col = RED;//继续往上调整cur = grandfather;parent = cur->_parent;//这里曾经忘记写}//叔叔不存在或者存在且为黑else//(uncle==nullptr || uncle->_col == BLACK){//左右双旋RotateL(parent);RotateR(grandfather);//变色grandfather->_col = RED;cur->_col = BLACK;//旋转后就无需再沿祖先路径检查了,具体原因画图理解break;}}}else//(parent == grandfather->_right){Node* uncle = grandfather->_left;if (cur == parent->_right){// grandfather// parent// cur//画图//叔叔存在且为红if (uncle && uncle->_col == RED){//变色parent->_col = BLACK;uncle->_col = BLACK;grandfather->_col = RED;//继续沿祖先路径检查cur = grandfather;parent = cur->_parent;}//叔叔不存在或者存在且为黑else//(uncle==nullptr || uncle->_col == BLACK){//单纯的右边高,进行左单旋+变色RotateL(grandfather);grandfather->_col = RED;parent->_col = BLACK;//旋转+变色后就不需要再沿祖先路径检查了break;}}else//(cur == parent->_left){// grandfather// parent// cur//叔叔存在且为红if (uncle && uncle->_col == RED){//变色parent->_col = BLACK;uncle->_col = BLACK;grandfather->_col = RED;//继续沿祖先路径检查cur = grandfather;parent = cur->_parent;}//叔叔不存在或者存在且为黑else//(uncle==nullptr || uncle->_col == BLACK){//根据模型可知需要右左双旋+变色RotateR(parent);RotateL(grandfather);grandfather->_col = RED;cur->_col = BLACK;//旋转后就不需要再沿祖先路径检查了break;}}}}_num++;//最后记得把根节点的颜色改成黑色_root->_col = BLACK;return true;}size_t Size(){return _num;}bool Isbalance(){return _Isbalance(_root);}void Inorder(){_Inorder(_root);}private:bool CheckColour(Node* root, int blackNum, int BenchMark){//走到空树说明这条路径已经走完了,需要检查黑色节点的个数和基准值相不相等if (root == nullptr){//如果不相等,证明不平衡,返回falseif (blackNum != BenchMark){return false;}//如果相等,则说明本条路径没有出事,还要检查其它路径return true;}//如果出现连续红色节点证明这棵树出问题了,返回falseif (root->_col == RED && root->_parent && root->_parent->_col == RED){return false;}if (root->_col == BLACK){blackNum++;}//递归检查所有路径的颜色return CheckColour(root->_left, blackNum, BenchMark)&& CheckColour(root->_right, blackNum, BenchMark);}bool _Isbalance(Node* root){//空树可以认为是平衡的if (root == nullptr){return true;}//根节点不是黑色说明这棵树出事了if (root->_col != BLACK){return false;}//先算出一条路径的黑色节点的个数作为基准值,检查其它路径的黑色节点数目是否跟这个标准值//是否一样,如果不一样就证明这棵树不平衡了,那么如果这个基准值本身就是错的呢,那也没有关系,//只要有路径的黑色节点和其它路径不相等,就说明肯定有其中一条路径出问题了,至于是哪条路径//出问题就不重要了int BenchMark = 0;Node* cur = root;while (cur){if (cur->_col == BLACK){BenchMark++;}cur = cur->_left;}//检查所有路径中是否有连续红色节点和各路径中黑色节点的数目是否相等return CheckColour(root, 0, BenchMark);}void _Inorder(Node* root){if (root == nullptr){return;}_Inorder(root->_left);cout << root->_kv.second << " ";_Inorder(root->_right);}//旋转的细节如果不清楚的话请看上一篇关于AVL树的旋转,红黑树的旋转和AVL树的旋转是一样的void RotateL(Node* parent){assert(parent);Node* cur = parent->_right;Node* curleft = cur->_left;Node* parentParent = parent->_parent;parent->_right = curleft;cur->_left = parent;if (curleft){curleft->_parent = parent;}parent->_parent = cur;if (parent == _root){_root = cur;cur->_parent = nullptr;}else{if (parent == parentParent->_left){parentParent->_left = cur;}else{parentParent->_right = cur;}cur->_parent = parentParent;}}void RotateR(Node* parent){assert(parent);Node* cur = parent->_left;Node* curright = cur->_right;Node* parentParent = parent->_parent;parent->_left = curright;cur->_right = parent;if (curright){curright->_parent = parent;}parent->_parent = cur;if (parent == _root){_root = cur;cur->_parent = nullptr;}else{if (parent == parentParent->_left){parentParent->_left = cur;}else{parentParent->_right = cur;}cur->_parent = parentParent;}}private:Node* _root = nullptr;int _num = 0;//统计树的节点个数};void testRBTree(void){RBTree<int, int> rbt;int arr[]= { 16, 3, 7, 11, 9, 26, 18, 14, 15 };for (const auto& e : arr){rbt.Insert(make_pair(e, e));}/*rbt.Inorder();*/cout << rbt.Size() << endl;bool ret = rbt.Isbalance();cout << ret << endl;cout << endl;}void testRBTree1(void){RBTree<int, int> rbt;int N = 10000;srand((unsigned int)time(nullptr));for (size_t i=0;i<N;i++){int e = rand();rbt.Insert(make_pair(e, e));}cout << rbt.Size() << endl;bool ret = rbt.Isbalance();cout << ret << endl;cout << "插入完成" << endl;}
}
以上就是红黑树的相关内容了,最重要的是要理解当红黑树插入元素后违反了红黑树的规则时该如何对节点进行旋转加变色来使这棵红黑树重新回到平衡的。至于删除节点的操作就不实现了,有兴趣的可以去看看《算法导论》这本书,里面有讲红黑树删除操作的。
好啦,以上就是今天想要跟大家谈的关于红黑树的最重要的内容了,你学会了吗?如果你感觉到有所帮助,那么点点小心心,点点关注呗,后期还会持续更新C++的相关知识哦,我们下期见啦!!!
相关文章:
C++数据结构--红黑树
目录 一、红黑树的概念二、红黑树的性质三、红黑树的节点的定义四、红黑树结构五、红黑树的插入操作参考代码 五、代码汇总 一、红黑树的概念 红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black。 通过…...

Linux perf使用思考
目录 一、参考资料(建议阅读)二、值得思考的几个问题1、perf使用不同的性能事件进行统计有什么区别呢?2、那使用不同的性能事件统计出来的数据?排序是如何决定的,其中的百分比数值在不同的性能事件进行统计时各自的意义…...

自定义路由断言工厂
我们来设定一个场景: 假设我们的应用仅仅让age在(min,max)之间的人来访问。 第1步:在配置文件中,添加一个Age的断言配置 spring: application:name: api-gateway cloud:nacos:discovery:server-addr: 127.0.0.1:8848gateway:discovery:locator:enabled: trueroute…...

Nacos安装及在项目中的使用
目录 概要一、安装 Nacos1、下载 Nacos2、解压3、启动 Nacos 服务器4、自定义Nacos启动脚本5、访问Nacos Web控制台 二、Nacos----服务注册与发现1、添加 Nacos 依赖2、配置 Nacos 服务器地址3、使用 Nacos 注册服务4、启动服务 三、Nacos----配置管理1、创建配置数据2、从 Nac…...

overleaf中latex语法总结
α和bata $\alpha$ $\beta$上标和下标同时使用 $A_{IJ}^{IJ}$\\ %上标^下标_多个使用{}行内公式 \noindent $abc$\\ %行内公式\documentclass{article} \usepackage[utf8]{inputenc} \usepackage[namelimits]{amsmath} %数学公式 \usepackage{amssymb} %数学公式…...

Grafana配置邮件告警
1、创建一个监控图 2、grafana邮件配置 vim /etc/grafana/grafana.ini [smtp] enabled true host smtp.163.com:465 user qinziteng05163.com password xxxxx # 授权码 from_address qinziteng05163.com from_name Grafanasystemctl restart grafana-serv…...

setup中的nextTick函数
await nextTick() 是 Vue 3 的一个异步函数,用于等待 DOM 更新完成后执行回调函数, 它在 setup 函数中非常有用,可以确保在对 DOM 进行操作之前,先等待 Vue 完成相关的 DOM 更新。 下面是一个示例,演示了 await nextT…...
Matlab信号处理3:fft(快速傅里叶变换)标准使用方式
Fs 1000; % 采样频率 T 1/Fs; % 采样周期:0.001s L 1500; % 信号长度 t (0:L-1)*T; % 时间向量. 时间向量从0开始递增,0s~1.499sS 0.7*sin(2*pi*50*t) sin(2*pi*120*t); % 模拟原信号 X S 2*randn(size(t)); …...

Python|合并两个字典的几种方法
在Python中,有多种方法可以通过使用各种函数和构造函数来合并字典。在本文中,我们将讨论一些合并字典的方法。 1. 使用方法update() 通过使用Python中的update()方法,可以将一个列表合并到另一个列表中。但是在这种情况下,第二个…...

ElementUI浅尝辄止24:Message 消息提示
常用于主动操作后的反馈提示。与 Notification 的区别是后者更多用于系统级通知的被动提醒。 1.如何使用? Message 在配置上与 Notification 非常类似,所以部分 options 在此不做详尽解释,可以结合 Notification 的文档理解它们。Element 注…...
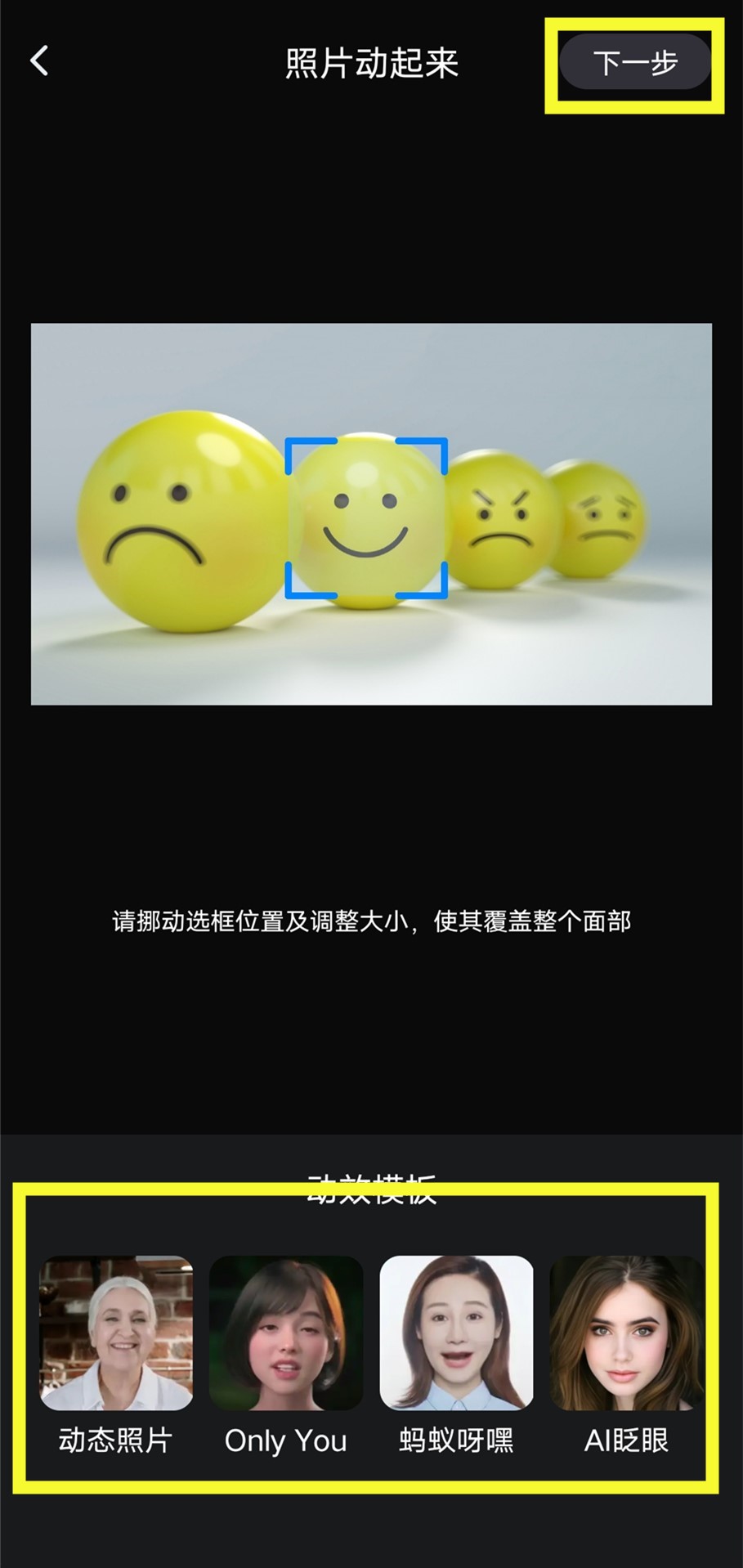
让照片动起来的软件,轻松制作照片动效
随着社交媒体的日益普及,我们对于照片的要求也越来越高。普通的照片已经不能满足我们的需求,我们希望照片更加生动有趣。照片动效便应运而生,它可以让照片动起来,吸引更多的注意力,让照片更加生动有趣。 照片动效制作起…...
【图解RabbitMQ-7】图解RabbitMQ五种队列模型(简单模型、工作模型、发布订阅模型、路由模型、主题模型)及代码实现
🧑💻作者名称:DaenCode 🎤作者简介:CSDN实力新星,后端开发两年经验,曾担任甲方技术代表,业余独自创办智源恩创网络科技工作室。会点点Java相关技术栈、帆软报表、低代码平台快速开…...

Linux命令200例:write用于向特定用户或特定终端发送信息
🏆作者简介,黑夜开发者,CSDN领军人物,全栈领域优质创作者✌。CSDN专家博主,阿里云社区专家博主,2023年6月csdn上海赛道top4。 🏆数年电商行业从业经验,历任核心研发工程师࿰…...
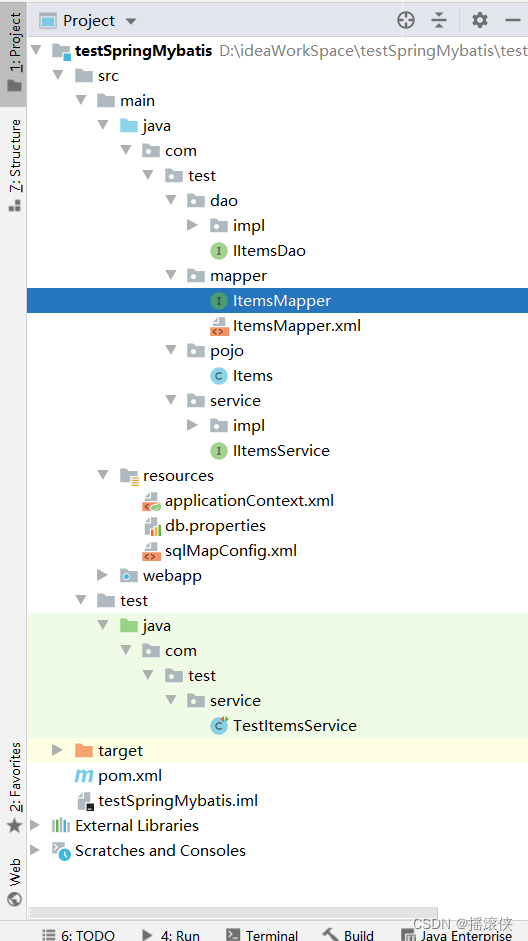
javaee spring整合mybatis spring帮我们创建dao层
项目结构 pom依赖 <?xml version"1.0" encoding"UTF-8"?><project xmlns"http://maven.apache.org/POM/4.0.0" xmlns:xsi"http://www.w3.org/2001/XMLSchema-instance"xsi:schemaLocation"http://maven.apache.org/P…...
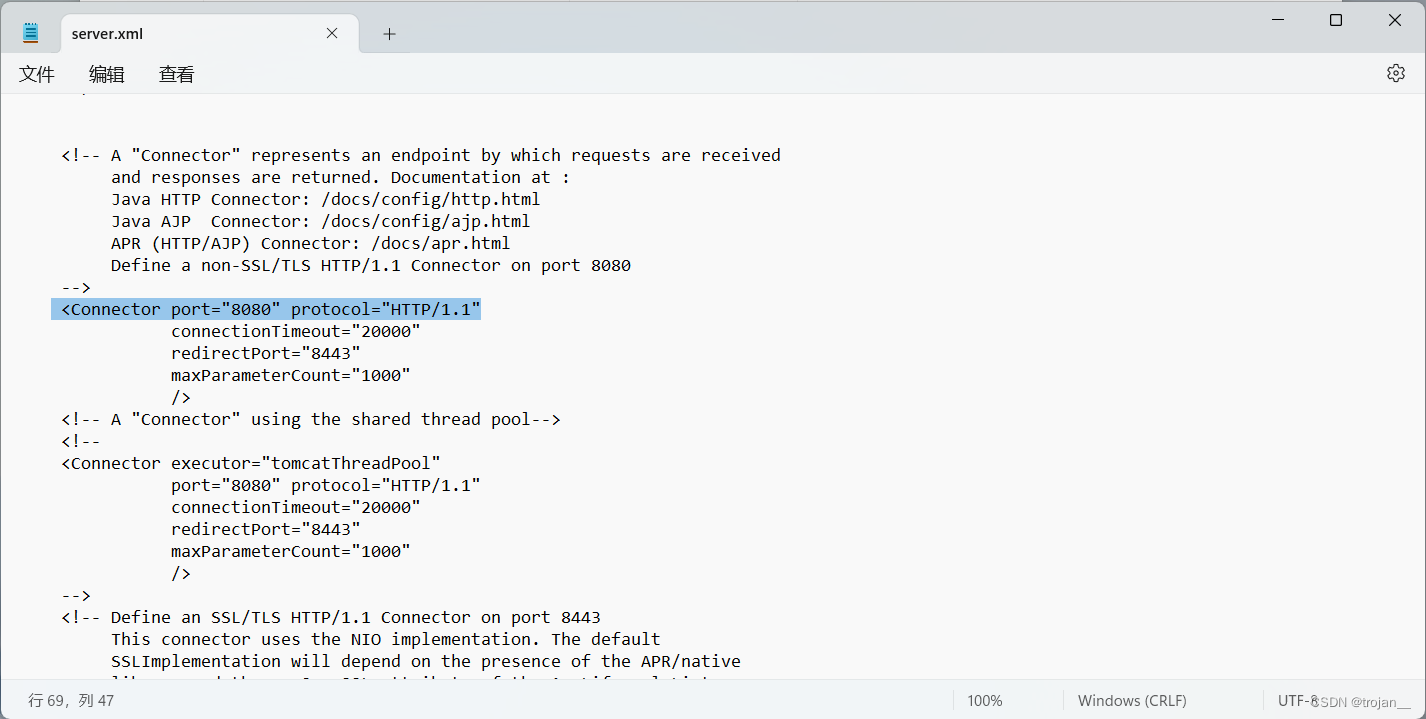
修改Tomcat的默认端口号
1、找到Tomcat的安装路径。 2、打开conf文件夹。 3、用记事本打开server.xml文件 4、找到 <Connector port"8080" protocol"HTTP/1.1",其中的8080就是tomcat的默认端口,将其修改为你需要的端口即可。...

Open3D Ransac拟合空间直线(python详细过程版)
RANSAC拟合直线 一、算法原理1、算法简介2、参考文献二、代码实现三、结果展示本文由CSDN点云侠原创,原文链接。如果你不是在点云侠的博客中看到该文章,那么此处便是不要脸的爬虫。 一、算法原理 1、算法简介 见:Open3D——RANSAC 三维点云空间直线拟合 2、参考文献...

题目:2729.判断一个数是否迷人
题目来源: leetcode题目,网址:2729. 判断一个数是否迷人 - 力扣(LeetCode) 解题思路: 对 n,2*n,3*n 中的数字出现次数计数,若数字 0 出现 0 次,数字 1~9…...
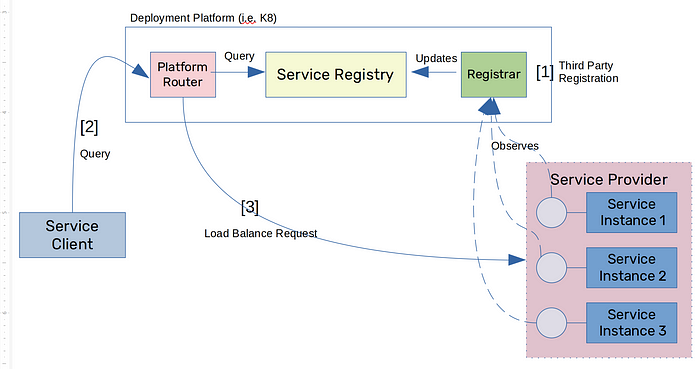
微服务模式:服务发现模式
由于微服务应用的动态性,很难调用具有固定 IP 地址的服务。这就是服务发现的概念出现的背景。服务发现有助于客户端了解服务实例的位置。在这种情况下,服务发现组件将充当服务注册表。 服务注册表是一个包含服务实例位置的集中式服务器/数据库。在微服务…...
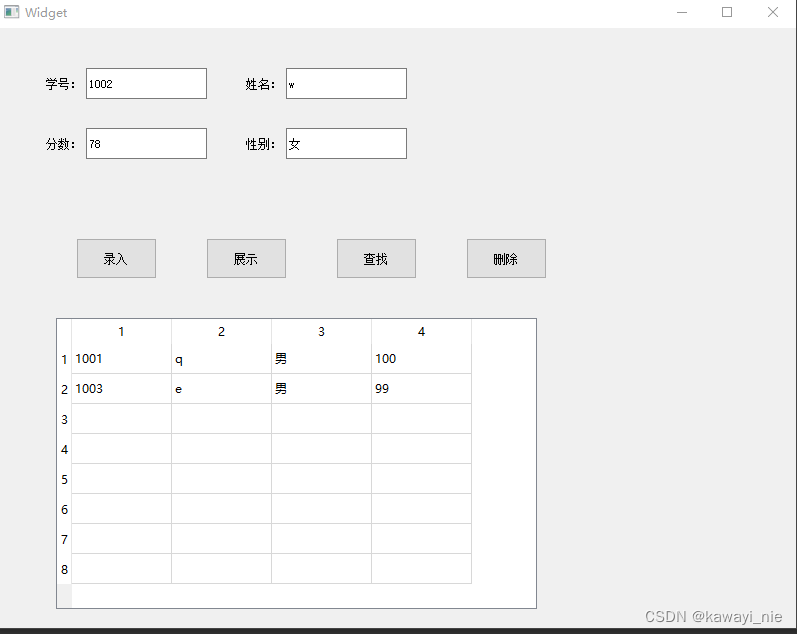
9.4 数据库 TCP
#include "widget.h" #include "ui_widget.h"Widget::Widget(QWidget *parent): QWidget(parent), ui(new Ui::Widget) {ui->setupUi(this);//判断数据库对象是否包含了自己使用的数据库if(!db.contains("Stu.db")){//不存在数据库࿰…...
普通用户使用spark的client无法更新Ranger策略
普通用户使用spark的client无法更新Ranger策略 报错图片: WARN org.apache.ranger.admin.client.RangerAdminRESTClient: Error getting Roles. secureModetrue, usercaojianxiangUCDIPA.VIATRIS.CC (auth:KERBEROS),responsef"httpStatusCode&quo…...

告别纯视觉:如何将DEM高程数据喂给你的CNN模型提升滑坡识别准确率?
异构数据融合实战:当卫星影像遇见DEM高程的深度学习革命 滑坡识别一直是地质灾害监测领域的痛点问题。传统纯视觉方法依赖光学卫星影像(RGB)分析,但复杂地形条件下的误报率居高不下——直到数字高程模型(DEM࿰…...
)
从桌面玩具到生产力工具:Dobot Magician机械臂的5个超实用项目实战(含代码)
从桌面玩具到生产力工具:Dobot Magician机械臂的5个超实用项目实战(含代码) 在创客圈里积灰的Dobot Magician机械臂,可能正等待一次真正的觉醒。这款被许多人当作"高级玩具"的六轴机械臂,实际上隐藏着足以改…...

GPT-5级能力提前落地,ChatGPT 2026新增9大生产级功能,含RAG++动态知识图谱、零样本工作流编排、联邦学习微调接口——错过本轮升级将落后至少18个月
更多请点击: https://intelliparadigm.com 第一章:GPT-5级能力提前落地的技术本质与产业影响 当前,所谓“GPT-5级能力”并非依赖单一巨型模型发布,而是通过模型蒸馏、多专家协同推理(MoE)、实时知识注入与…...

ServerPackCreator:3分钟搞定Minecraft服务器包配置的智能自动化工具
ServerPackCreator:3分钟搞定Minecraft服务器包配置的智能自动化工具 【免费下载链接】ServerPackCreator Create a server pack from a Minecraft Forge, NeoForge, Fabric, LegacyFabric or Quilt modpack! 项目地址: https://gitcode.com/gh_mirrors/se/Server…...

Windows 一键部署 OpenClaw 教程|5 分钟搭建本地 AI 智能体,轻松搞定复杂配置
OpenClaw 2.7.1 接入阿里云百炼超详细图文教程 📋 前置准备 本地已安装并能正常运行 OpenClaw 2.7.1 WindowsOpenClaw 顶部 Gateway 保持在线状态拥有可正常登录的阿里云账号网络可正常访问阿里云百炼控制台: https://bailian.console.aliyun.com/cn-be…...

阿里季报图解:营收2434亿 AI迎商业化拐点,模型及应用ARR年底破300亿,派息25亿美元
雷递网 雷建平 5月13日阿里巴巴(美股代码:“baba”,港股代号:9988)今日发布2026年第一季度的财报。财报显示,阿里2026年第一季度营收为2433.8亿元(352.83亿美元),同比增长…...

【车辆控制】模糊偏航的扭矩矢量与主动转向控制系统【含Matlab源码 15444期】含报告
💥💥💥💥💥💥💥💥💞💞💞💞💞💞💞💞💞Matlab领域博客之家💞&…...

跨设备游戏串流终极方案:Sunshine开源服务器高效解决游戏共享难题
跨设备游戏串流终极方案:Sunshine开源服务器高效解决游戏共享难题 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine Sunshine作为一款自托管的开源游戏串流服务器&#x…...

基于陷门矩阵的高效安全委托计算方案
1. 项目概述在现代计算环境中,线性代数运算(如矩阵乘法)占据了大量计算资源。随着云计算和机器学习的发展,越来越多的计算任务被委托给云端服务器执行。然而,这种委托计算模式带来了严重的数据隐私问题——用户需要将原…...

16Gb容量+1866Mbps速率:NT6CL512T32AM-H1的LPDDR3移动存储参数解析
NT6CL512T32AM-H1:16Gb LPDDR3移动DRAM的技术解析在移动计算、工业嵌入式以及车载信息娱乐等对功耗和性能双重敏感的应用领域,内存子系统的选择直接影响产品的续航能力和数据处理效率。NT6CL512T32AM-H1是南亚科技推出的一款16Gb LPDDR3 SDRAM࿰…...