OpenCV之霍夫变换检测直线
霍夫变换
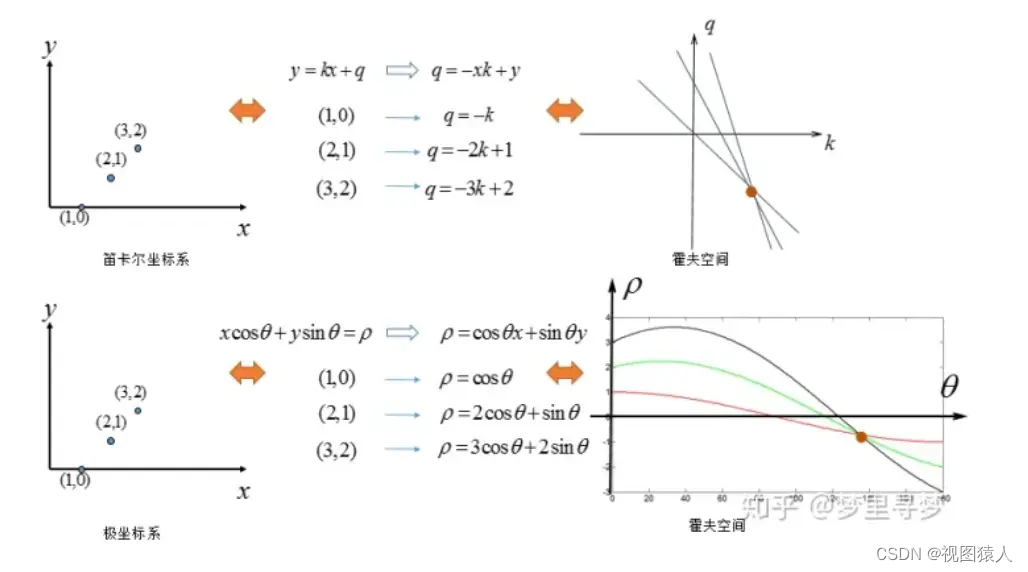
首先是笛卡尔坐标系到霍夫空间的转换,比如笛卡尔坐标系中有一条直线 y=ax+b。
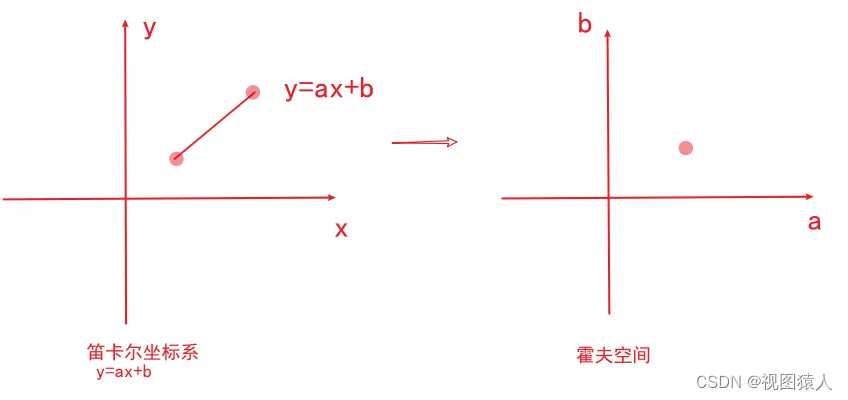
笛卡尔坐标系中一条直线,对应霍夫空间的一个点。
反过来同样成立(霍夫空间的一条直线,对应笛卡尔坐标系的一个点)
原理其实很简单
比如
(1)笛卡尔坐标系内y=ax+b 一条直线确定时 它的斜率和截距是确定的 即是a b是确定的,因此到了霍夫空间内就对应一个(a,b) 即是笛卡尔中一条直线对应霍夫空间一个点
(2)笛卡尔坐标系内一个点 比如x1,y1 相当于x1 y1是确定的 在霍夫空间中
b=-xa+y 即是 b=-x1a+y1 代表的是一条直线 即是笛卡尔中一个点对应霍夫空间一条直线
(3)笛卡尔坐标系多个点
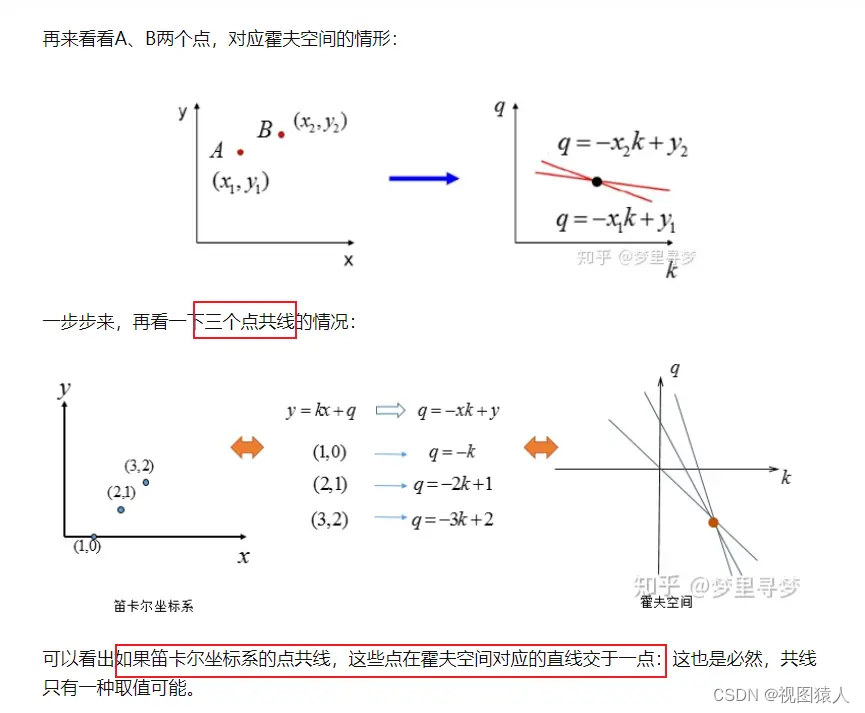
这些点如果共线 就相当于回到了(1) 笛卡尔坐标系中一条直线对应霍夫空间一个点
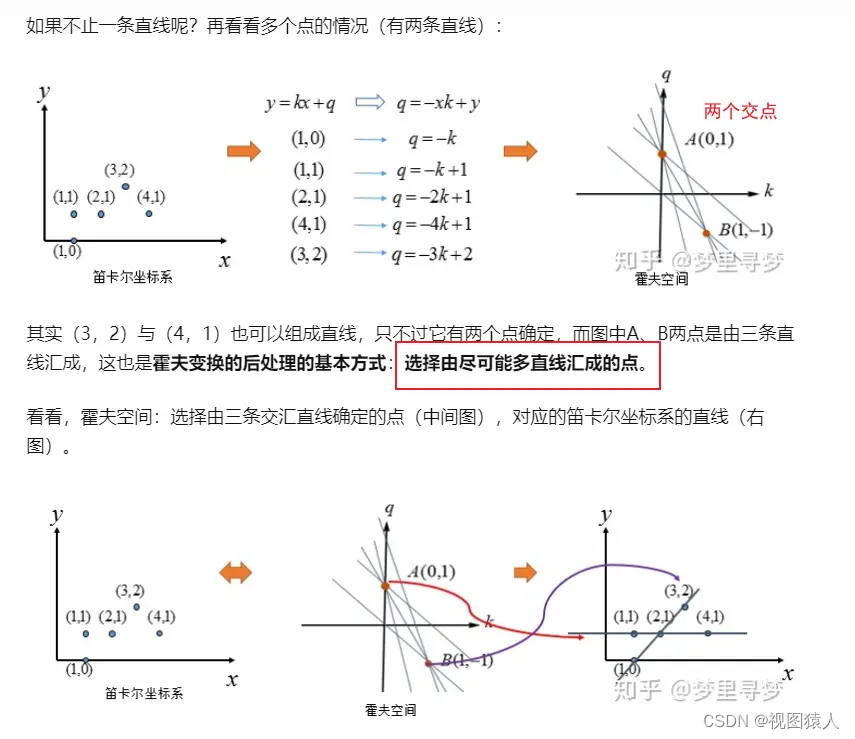
(4)笛卡尔坐标系多个点 不共线
(5)但是 如果直线斜率不存在的时候 霍夫空间那就不容易表示
因此我们换成极坐标 一样的转换原理
先求极坐标方程 其中参数从斜率a和截距b变成 极径p和极角θ
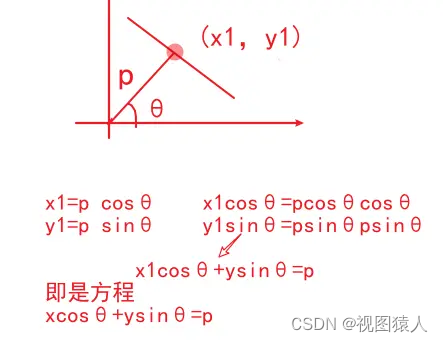
比如下面的变换对比
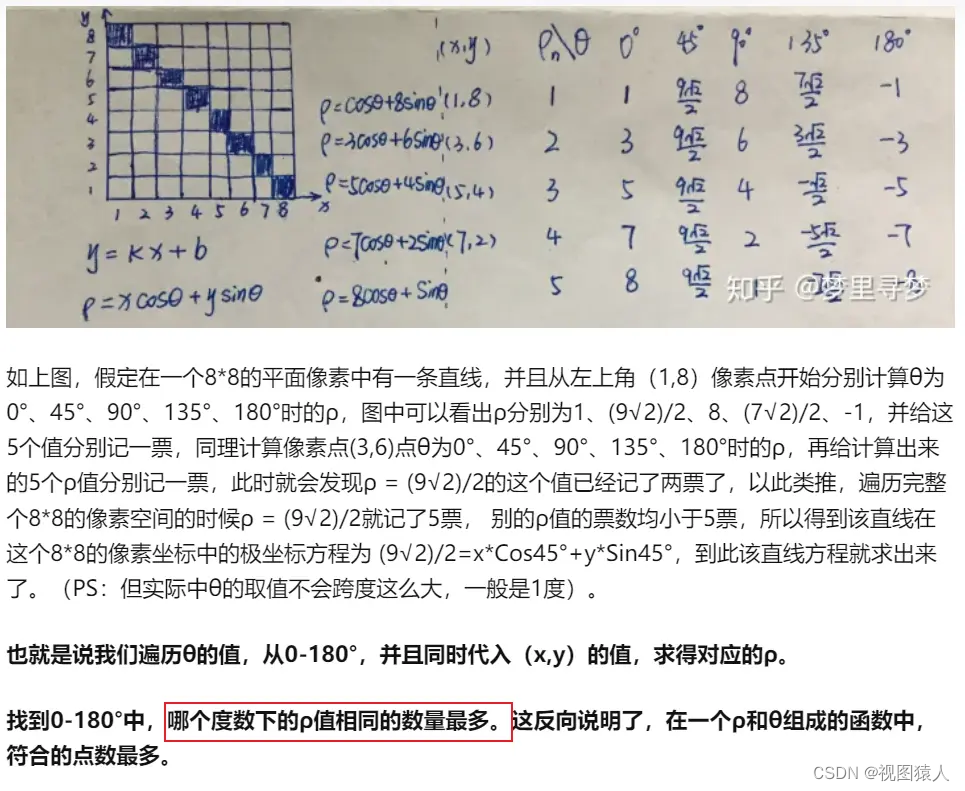
具体计算过程举例:
OpenCV C++实现
/*
*参数说明:
*src:待检测的原图像
*rho:以像素为单位的距离分辨率,即距离r离散时的单位长度
*theat:以角度为单位的距离分辨率,即角度Θ离散时的单位长度(取值的步长)
*Threshold:累加器阈值,参数空间中离散化后每个方格被通过的累计次数大于该阈值,则该方格代表的直线被视为在原图像中存在
*lines:检测到的直线极坐标描述的系数数组,每条直线由两个参数表示,分别为直线到原点的距离r和原点到直线的垂线与x轴的夹角
*/
void myHoughLines(Mat src, double rho, double theat, int Threshold, vector<Vec2f>& lines)
{if (src.empty() || rho < 0.1 || theat>360 || theat < 0)return;int row = src.rows;int col = src.cols;Mat gray;if (src.channels() > 1){cvtColor(src, gray, COLOR_BGR2GRAY);}elsesrc.copyTo(gray);int maxDistance = sqrt(src.cols * src.cols + src.rows * src.rows); // 图像任意两点最大距离int houghMat_cols = 360 / theat; // theat是角度取值的步长 霍夫变换后距离夹角坐标下对应的Mat的宽(一共多少个θ)int houghMat_rows = maxDistance / rho; // 霍夫坐标距离夹角下对应的Mat的高 就是p的取值个数 Mat houghMat = Mat::zeros(houghMat_rows, houghMat_cols, CV_32FC1); // 存储p和 θ的矩阵//边缘检测Canny(gray, gray, 100, 200, 3);//二值化threshold(gray, gray, 160, 255, THRESH_BINARY);//遍历二值化后的图像for (int i = 0; i < row; i++){for (int j = 0; j < col; j++){if (gray.ptr<uchar>(i)[j] != 0){/*从0到360度遍历角度,得到一组关于距离夹角的离散点,即得到一组关于经过当前点(i,j)按单位角度theat旋转得到的直线*/for (int k = 0; k < 360 / theat; k += theat){// k * CV_PI / 180 是极角 θ double r = i * sin(k * CV_PI / 180) + j * cos(k * CV_PI / 180);// 找哪个(θ,r) 最多 if (r >= 0){ // 直线到原点的距离必须大于0 获得在霍夫变换距离夹角坐标系下对应的Mat的行的下标int r_subscript = r / rho;// 经过该直线的点数加1houghMat.at<float>(r_subscript, k) = houghMat.at<float>(r_subscript, k) + 1;}}}}}/*现在 houghMat 矩阵里面的数值N 是经过这点的线个数(极坐标下)比如说 (行,列)对应 (p, θ) 对应的值就是 经过(p, θ)的线一共N条经过直线的点数N 大于阈值, 则视为在原图中存在该直线 就要这条直线了 */for (int i = 0; i < houghMat_rows; i++){for (int j = 0; j < houghMat_cols; j++){if (houghMat.ptr<float>(i)[j] > Threshold){// line保存直线到原点的距离和直线到坐标原点的垂线和x轴的夹角 求p和θVec2f line(i * rho, j * theat * CV_PI / 180);lines.push_back(line);}}}}相关文章:
OpenCV之霍夫变换检测直线
霍夫变换 首先是笛卡尔坐标系到霍夫空间的转换,比如笛卡尔坐标系中有一条直线 yaxb。 笛卡尔坐标系中一条直线,对应霍夫空间的一个点。 反过来同样成立(霍夫空间的一条直线,对应笛卡尔坐标系的一个点) 原理其实很简单 …...
lv3 嵌入式开发-11 Linux下GDB调试工具
目录 1 GDB简介 2 GDB基本命令 3 GDB调试程序 1 GDB简介 GDB是GNU开源组织发布的一个强大的Linux下的程序调试工具。 一般来说,GDB主要帮助你完成下面四个方面的功能: 1、启动你的程序,可以按照你的自定义的要求随心所欲的运行程序&#…...
Zabbix监控平台概念
1.概念 Zabbix是一款开源的、免费的、分布式监控平台支持web管理,WEB界面可以方便管理员使用可以监控硬件服务器CPU温度、风扇转速、操作系统CPU、EME、DISK、I/O、流量宽带、负载、端口、进程等Zabbix是C/S架构,Client客户端和Server端组成 2.Zabbix可…...
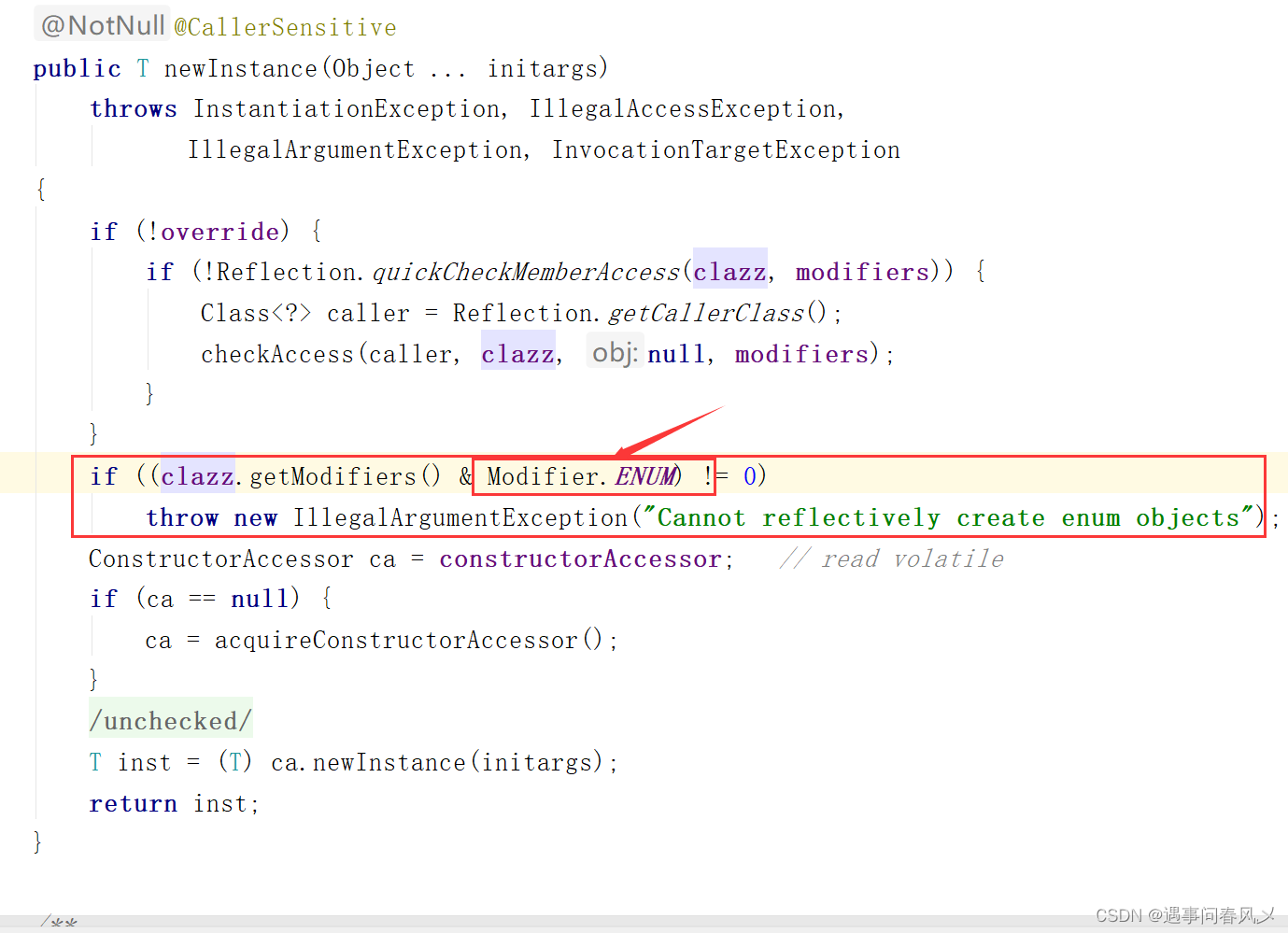
【javaSE】 枚举与枚举的使用
文章目录 🎄枚举的背景及定义⚾枚举特性总结: 🌲枚举的使用🚩switch语句🚩常用方法📌示例一📌示例二 🎍枚举优点缺点🌴枚举和反射🚩枚举是否可以通过反射&…...
NetSuite知识会汇编-管理员篇顾问篇2023
本月初,开学之际,我们发布了《NetSuite知识会汇编-用户篇 2023》,这次发布《NetSuite知识会汇编-管理员篇&顾问篇2023》。本篇挑选了近两年NetSuite知识会中的一些文章,涉及开发、权限、系统管理等较深的内容,共19…...

根号分治与多项式的巧妙结合:GYM-104386G
使用范围:序列上对于每种数的计数问题 考虑对每种数的出现次数进行根号分治 如果出现次数很少,直接平方暴力即可 如果很大考虑任意 ( i , j ) (i,j) (i,j),我们拆一下,再移一下,然后就变成了卷积形式...

通过FTP高速下载几百G数据
基因组下载 (FTP) 常见问题解答 基因组FTP站点有哪些亮点?下载多个基因组组装数据的最简单方法是什么?下载大型数据集的最佳协议是什么?为什么 NCBI 基因组 FTP 站点要重组?我如何及时了解 NCBI 基因组 FTP 站点的变化?...

cudnn-windows-x86_64-8.6.0.163_cuda11-archive 下载
网址不太好访问的话,请从下面我提供的分享下载 Download cuDNN v8.6.0 (October 3rd, 2022), for CUDA 11.x 此资源适配 cuda11.x 将bin和include文件夹里的文件,分别复制到C盘安装CUDA目录的对应文件夹里 安装cuda时自动设置了 CUDA_PATH_V11_8 及path C:\Progra…...
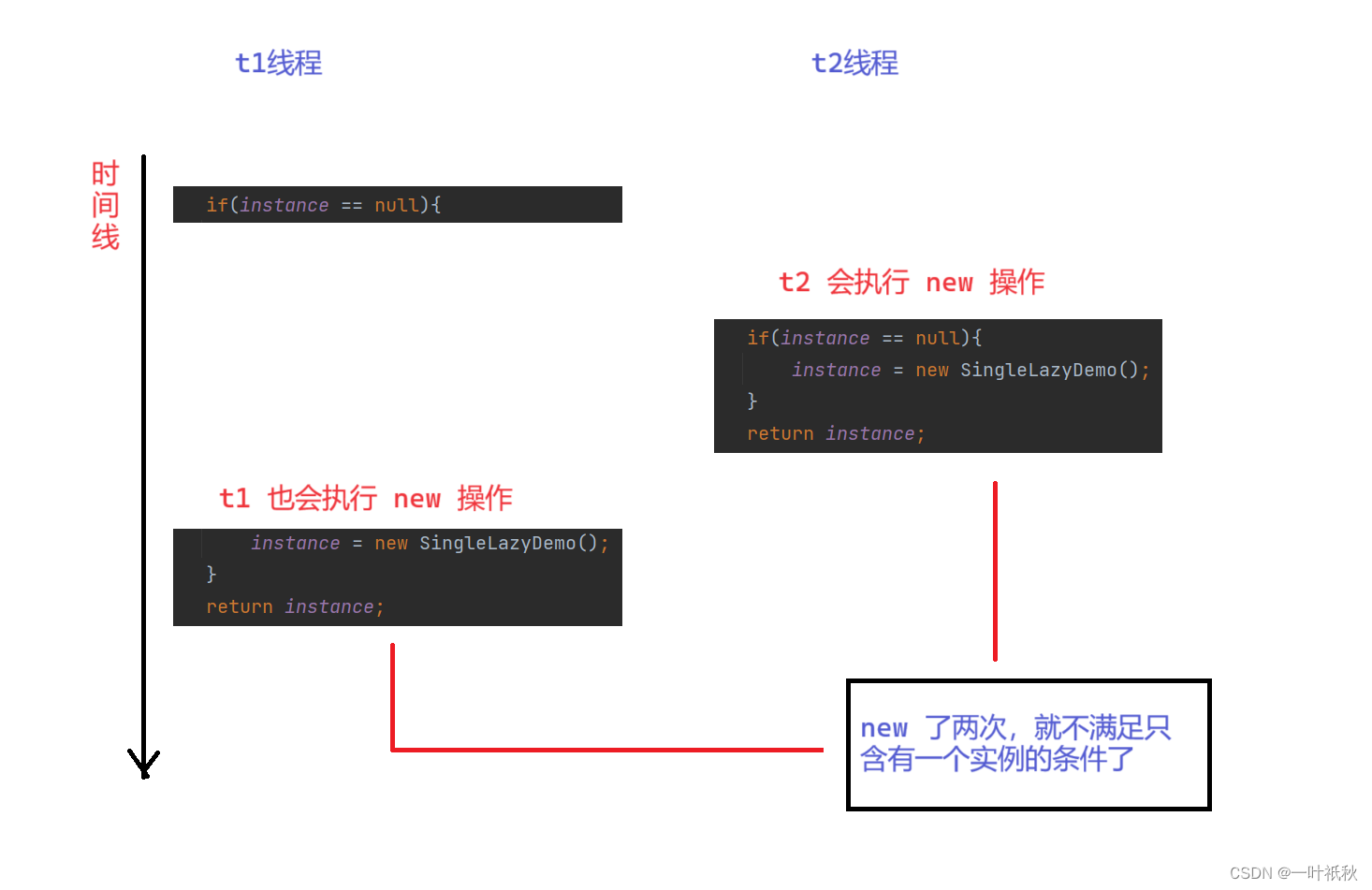
多线程案例(1) - 单例模式
目录 单例模式 饿汉模式 懒汉模式 前言 多线程中有许多非常经典的设计模式(这就类似于围棋的棋谱),这是用来解决我们在开发中遇到很多 "经典场景",简单来说,设计模式就是一份模板,可以套用。…...
)
Arduino驱动TCS34725传感器(颜色传感器篇)
目录 1、传感器特性 2、硬件原理图 3、控制器和传感器连线图 4、驱动程序 TCS34725是一款低成本,高性价比的RGB全彩颜色识别传感器,传感器通过光学感应来识别物体的表面颜色。...

知识库网站如何搭建?需要注意这五个要点!
正因为知识库提供结构化知识库来记载信息和知识,便于团队沉淀经验、共享资源,形成完整的知识体系并持续进化,使得它成为当前企业发展新宠。 构建自己/团队的知识库是一个良好的习惯,可以提高工作和学习效率,以下是一…...
【UE虚幻引擎】UE源码版编译、Andorid配置、打包
首先是要下载源码版的UE,我这里下载的是5.2.1 首先要安装Git 在你准备放代码的文件夹下右键点击Git Bash Here 然后可以直接git clone https://github.com/EpicGames/UnrealEngine 不行的话可以直接去官方的Github上下载Zip压缩包后解压 运行里面的Setup.bat&a…...
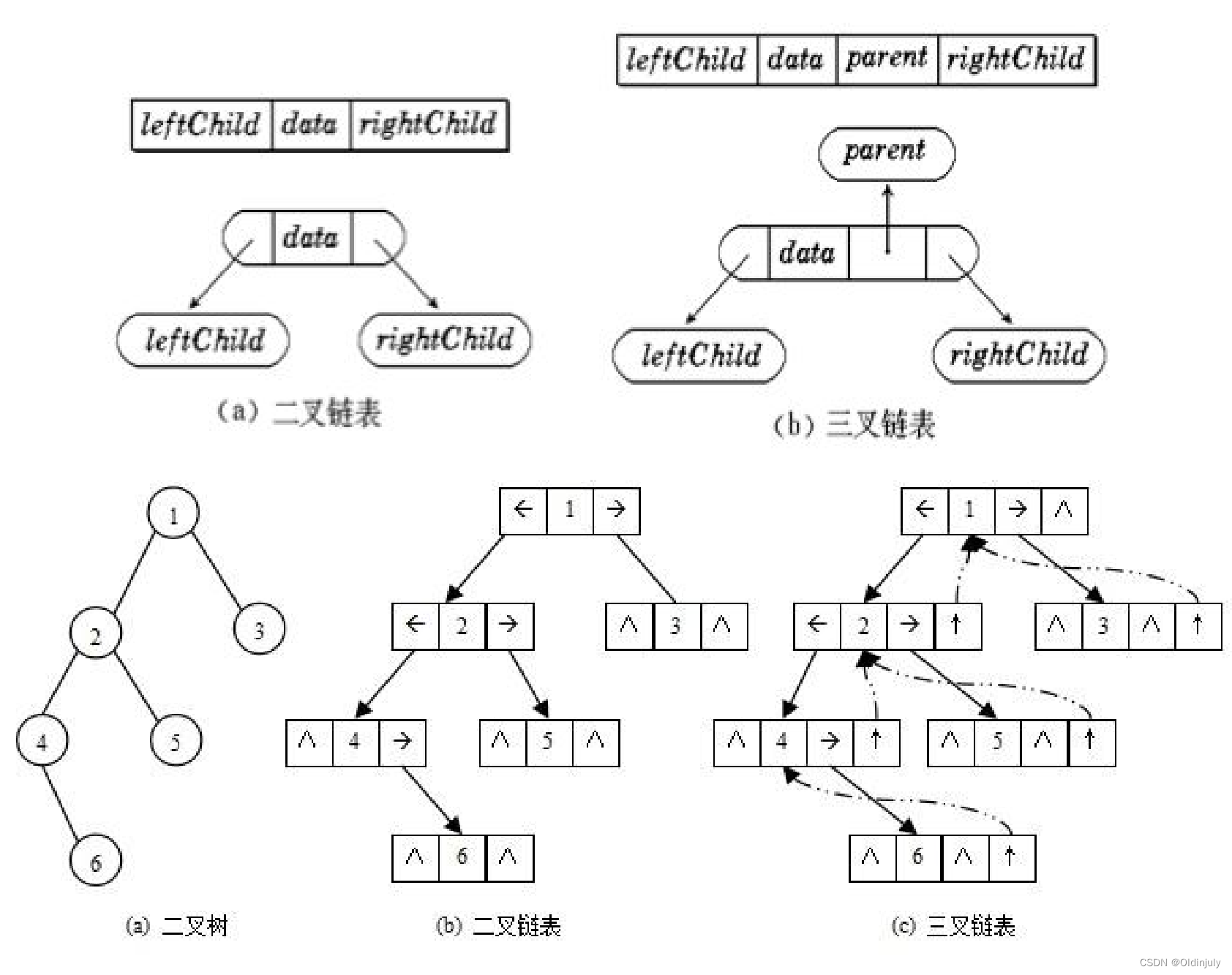
树和二叉树的相关概念及结构
目录 1.树的概念及结构 1.1 树的概念 1.2 树的相关概念 1.3 树的表示 1.3.1 孩子兄弟表示法 1.3.2 双亲表示法 1.4 树的实际应用 2.二叉树的概念及结构 2.1 二叉树的概念 2.2 特殊的二叉树 2.3 二叉树的性质 2.4 二叉树的存储 2.4.1 顺序存储 2.4.2 链式存储 1.树…...
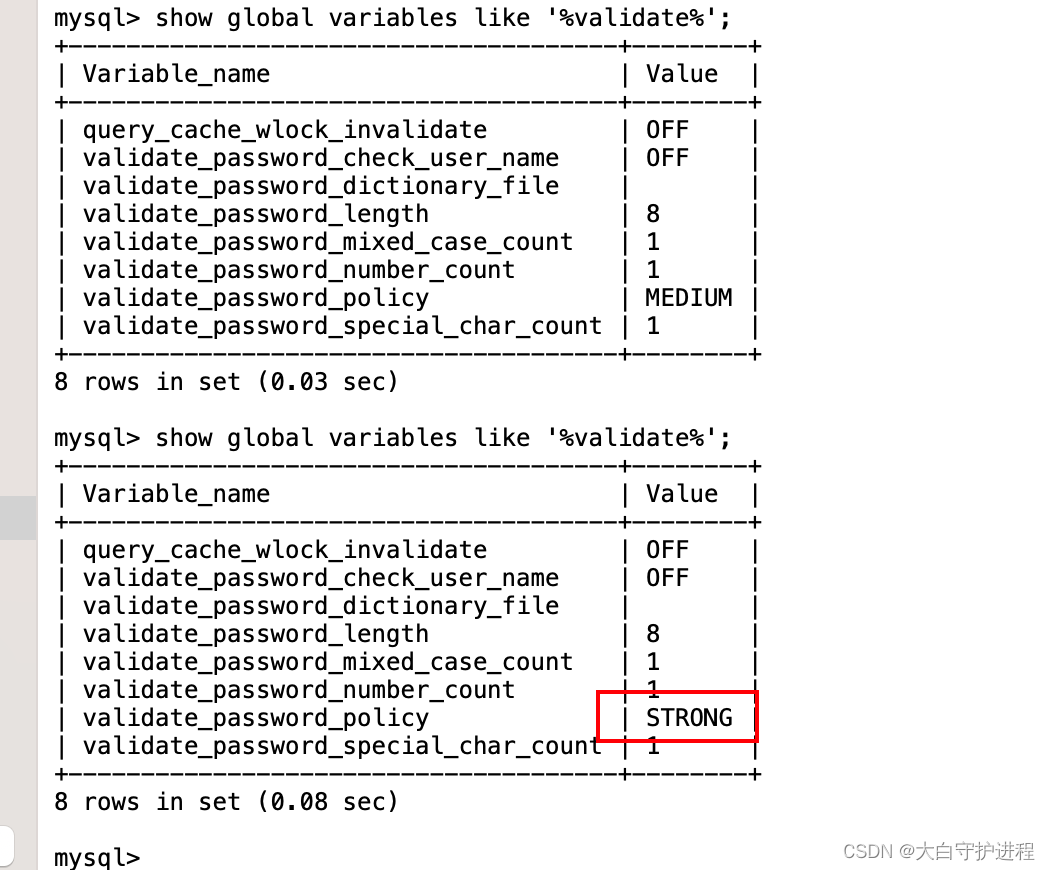
MySQL安装validate_password_policy插件
功能介绍 validate_password_policy 是插件用于验证密码强度的策略。该参数可以设定三种级别:0代表低,1代表中,2代表高。 validate_password_policy 主要影响密码的强度检查级别: 0/LOW:只检查密码长度。 1/MEDIUM&am…...

数据在内存中的存储——练习3
题目: 3.1 #include <stdio.h> int main() {char a -128;printf("%u\n",a);return 0; }3.2 #include <stdio.h> int main() {char a 128;printf("%u\n",a);return 0; }思路分析: 首先二者极其相似%u是无符号格式进行…...
web-案例
分页插件 登录 事务...
第一章 JAVA入门
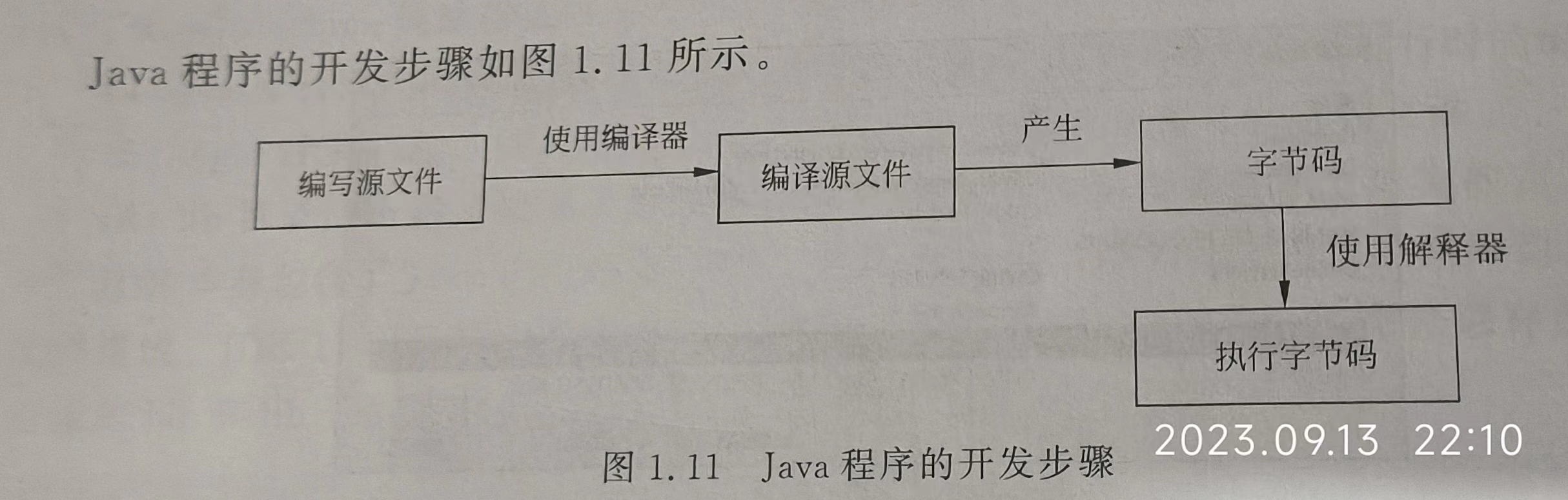
文章目录 1.2 Java 的特点1.2.1 简单1.2.2 面向对象1.2.3 与平台无关① 平台与机器指令② C/C程序依赖平台③ Java 虚拟机与字节码1.2.4 多线程1.2.5 动态1.30安装 JDK1.3.1 平台简介0 Java SE②Java EE1.4 Java 程序的开发步骤②保存源文件1.5.2 编译1.8 Java之父-James Gosli…...
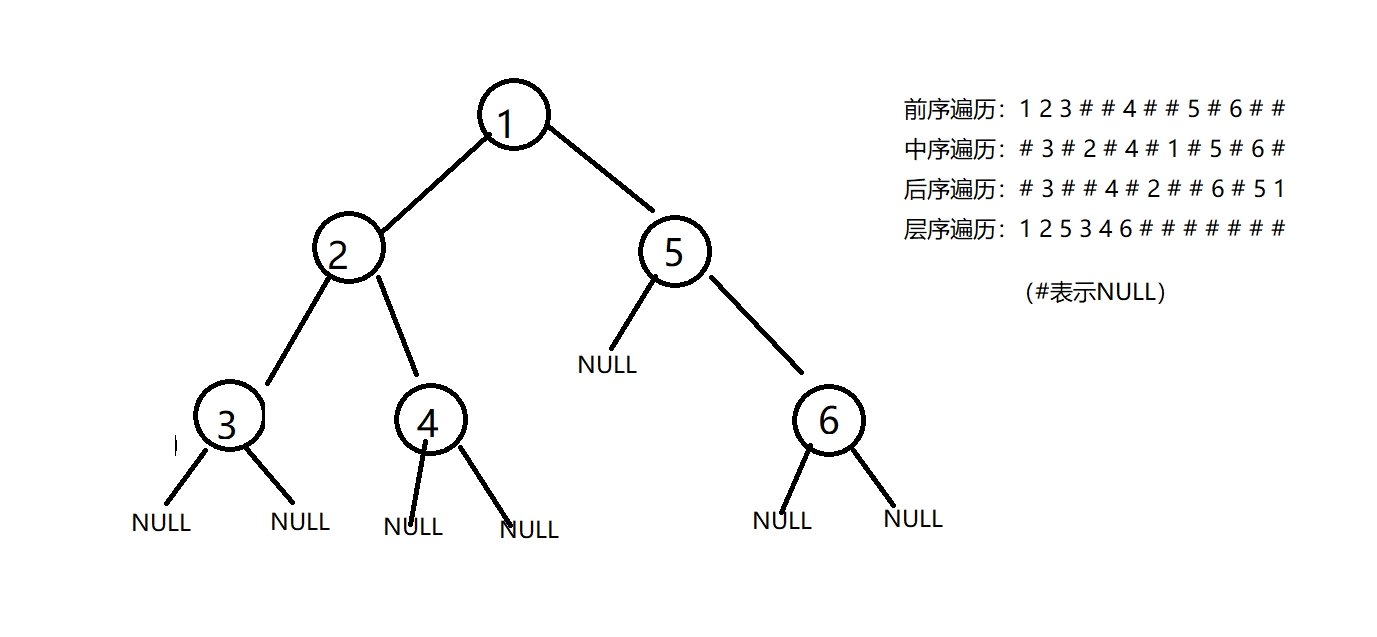
二叉树详解(求二叉树的结点个数、深度、第k层的个数、遍历等)
二叉树,是一种特殊的树,特点是树的度小于等于2(树的度是整个树的结点的度的最大值),由于该特性,构建二叉树的结点只有三个成员,结点的值和指向结点左、右子树的指针。 typedef int DateType; t…...

Apollo配置中心及Python连接
本文将会介绍如何启动Apollo,在Apollo中配置参数,以及如何使用Python连接Apollo. Apollo介绍 在文章Python之读取配置文件和文章Python之配置文件处理中,笔者分别介绍了如何使用Python来处理ini, yaml, conf等配置文件。这种配置方式比较方便…...
--audio - 多媒体音频)
LuatOS-SOC接口文档(air780E)--audio - 多媒体音频
常量 常量 类型 解释 audio.PCM number PCM格式,即原始ADC数据 audio.MORE_DATA number audio.on回调函数传入参数的值,表示底层播放完一段数据,可以传入更多数据 audio.DONE number audio.on回调函数传入参数的值,表示…...

基于大语言模型的自动化信息处理系统:从RSS聚合到AI摘要的实践
1. 项目概述:一个能帮你“读”新闻的AI助手 在信息爆炸的时代,每天光是处理订阅的RSS、关注的社交媒体动态、收藏的YouTube视频和没读完的长文,就足以让人精疲力尽。我们总想保持对行业趋势的敏感,却又被海量信息淹没,…...

Factool:大语言模型事实核查工具包的设计原理与工程实践
1. 项目概述:当AI学会“查证”,我们该如何信任它?最近在折腾大语言模型(LLM)应用落地的朋友,估计都绕不开一个头疼的问题:幻觉(Hallucination)。你让模型写一篇行业报告&…...

为什么你的Ziatype输出总是发灰?3分钟定位CMYK→RGB色域坍缩根源并一键修复
更多请点击: https://intelliparadigm.com 第一章:Ziatype印相发灰现象的直观诊断与认知重构 Ziatype是一种基于铁-银工艺的古典摄影印相法,其典型特征是高对比度、深沉黑位与细腻中间调。然而在实际操作中,“发灰”(…...

GPU云服务器选型指南:从核心参数到实际部署的深度解析
在当下人工智能跟高性能计算急剧速度发展状况里,GPU云服务器正沿着从专业领域迈向更为广泛应用场景的路径前行。对于构成企业的开发者、相关技术团队来讲,怎样精准无误理解这一技术方案所具备的本质,并且于实际选型期间做出合乎情理的判断&am…...

2篇3章3节:Trae 的高效小说创作与文件管理实操
在人工智能辅助小说创作的过程中,工具操作方式、内容生成逻辑与文件管理体系,直接决定写作效率与文稿质量。Trae作为适配小说创作的专业工具,不仅支持单章、全章智能化生成正文内容,适配短篇、长篇不同创作场景,还具备多屏拆分、标签页管理、规范化文件收纳等实用功能。熟…...

光子储层计算在无人机动态补偿中的创新应用
1. 深度光子储层计算在无人机动态补偿中的创新应用在无人机控制领域,传统PID控制器面对复杂流体环境时往往力不从心。当无人机在狭窄空间或近地面飞行时,地面效应、天花板效应以及湍流再循环等未建模动力学因素会导致显著的性能下降。我在参与某城市峡谷…...

GitHub 74.2k Star的Redis,开发者必备的内存数据库
文章目录GitHub 74.2k Star的Redis,开发者必备的内存数据库核心能力覆盖多数开发场景实际使用建议GitHub 74.2k Star的Redis,开发者必备的内存数据库 Redis是GitHub上的热门开源项目,Star数达到74223,是很多开发者日常工作中常用…...

Cursor Pro 终极破解指南:如何永久免费使用AI编程神器
Cursor Pro 终极破解指南:如何永久免费使用AI编程神器 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your tri…...

为什么你需要SRWE?5个轻松掌握Windows窗口管理的实用技巧
为什么你需要SRWE?5个轻松掌握Windows窗口管理的实用技巧 【免费下载链接】SRWE Simple Runtime Window Editor 项目地址: https://gitcode.com/gh_mirrors/sr/SRWE 你是否曾经为Windows窗口管理而烦恼?想要截图却受限于屏幕分辨率,需…...
到Stream API:Java二维数组初始化的几种高效写法与性能对比)
从Arrays.fill()到Stream API:Java二维数组初始化的几种高效写法与性能对比
从Arrays.fill()到Stream API:Java二维数组初始化的几种高效写法与性能对比 在算法竞赛和数据处理应用中,二维数组的初始化往往是性能优化的第一个瓶颈。我曾在一个图像处理项目中,因为选择了不当的初始化方式,导致整体性能下降了…...