[论文阅读笔记19]SiamMOT: Siamese Multi-Object Tracking
这是CVPR2021的一篇文章, 是利用SOT的一些思想来进行MOT的运动估计.
文章地址: 文章
代码地址: 代码
0. 摘要
本文提出了一个孪生(Siamese)式的MOT网络, 该网络用来估计帧间目标的运动. 为了探究运动估计对多目标跟踪的影响, 本文提出了两种运动建模方式: 显式和隐式. 本文在一些数据集上取得了良好的结果.
1. 整体思路
这篇文章是用SOT的思想做MOT的比较好的例子.
整个工作的具体思路是: 利用Siamese网络来更好地预测运动, 而不是Kalman滤波, 相当于用Siamese网络代替了Kalman.
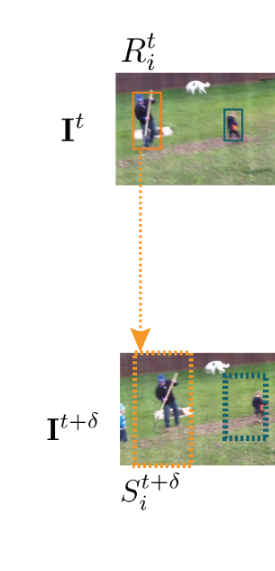
例如, 对于第ttt帧, 我们有第iii个目标的位置RitR_i^tRit, 然后我们扩张搜索区域, 在第t+δt + \deltat+δ帧将RitR_i^tRit的区域扩展, 初步决定搜索区域为Sit+1S_i^{t+1}Sit+1, 如下图橙色框所示. 我们的目的是用Siamese网络更好地从Sit+1S_i^{t+1}Sit+1中估计出目标在下一帧更精确的位置, 进而与检测更好地匹配.
为此, 我们提取RitR_i^tRit的特征fRitf_{R_i}^tfRit和Sit+1S_i^{t+1}Sit+1的特征fSit+δf_{S_i}^{t+\delta}fSit+δ, 输入至网络中, 输出缩小的可能的新区域R~it+δ\tilde{R}_{i}^{t+\delta}R~it+δ和该区域中包含目标的可能性viv_ivi, 因此整体的模型建模为:
vi,R~it+δ=T(fRit,fSit+δ,Θ)v_i, \tilde{R}_{i}^{t+\delta} = \mathcal{T}(f_{R_i}^t, f_{S_i}^{t+\delta}, \Theta) vi,R~it+δ=T(fRit,fSit+δ,Θ)
其中Θ\ThetaΘ为网络参数.
上式建模的方式有两种, 一是隐式运动建模, 二是显式运动建模.
1.1 隐式运动建模:
隐式运动建模很简单, 将fRitf_{R_i}^tfRit和fSit+δf_{S_i}^{t+\delta}fSit+δ拼接起来输入到MLP, 同时预测置信度和位置. 位置描述的是ttt时刻与t+δt+\deltat+δ时刻的位置差异, 表示为:
mi=[xit+δ−xitxit,yit+δ−yityit,logwit+δwit,loghit+δhit]m_i = [\frac{x_i^{t + \delta} - x_i^t}{x_i^t}, \frac{y_i^{t + \delta} - y_i^t}{y_i^t}, \log{\frac{w_i^{t+\delta}}{w_i^t}}, \log{\frac{h_i^{t+\delta}}{h_i^t}}] mi=[xitxit+δ−xit,yityit+δ−yit,logwitwit+δ,loghithit+δ]
因此可以反解出新的位置R~it+δ=[xit+δ,yit+δ,wit+δ,hit+δ]\tilde{R}_{i}^{t+\delta} = [x_i^{t + \delta}, y_i^{t + \delta}, w_i^{t + \delta}, h_i^{t + \delta}]R~it+δ=[xit+δ,yit+δ,wit+δ,hit+δ]
损失函数:
损失函数由两部分组成, 一是目标置信度的focal loss, 二是预测边界框的准确程度. 对于GT框, 我们可以按照mim_imi的式子求出对应的mi∗m_i^*mi∗ , 定义为:
L=lfocal(vi∗,vi)+I(vi∗)lreg(mi,mi∗)L = l_{focal}(v_i^*, v_i)+\mathbb{I}(v_i^*)l_{reg}(m_i, m_i^*) L=lfocal(vi∗,vi)+I(vi∗)lreg(mi,mi∗)
其中上标∗*∗表示真值, lregl_{reg}lreg表示平滑L1损失.
1.2 显式运动建模
还可以采用更复杂的形式. 采用通道维的互相关操作, 可以通过预测热度图的方式计算像素级的响应图, 有点类似于求解光流. 对于第ttt帧的区域特征fRitf_{R_i}^tfRit和第t+δt+\deltat+δ帧的初步搜索区域特征fSit+δf_{S_i}^{t+\delta}fSit+δ, 计算通道维互相关, 即ri=fRit∗fSit+δr_i = f_{R_i}^t * f_{S_i}^{t+\delta}ri=fRit∗fSit+δ, 其中∗*∗表示互相关操作, 这样就得到了两种特征图的相似度.
我们利用得到的rir_iri, 进一步预测像素级置信度的map vvv和位置的map ppp, 如下图所示.
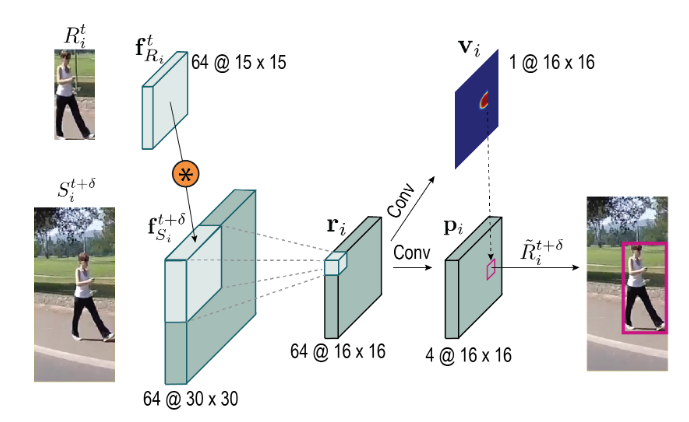
注意这里位置的map和一些无锚检测器类似, 预测的是offset. 具体地, 预测的是真实的bbox与当前像素四个方向的offset. 为此, 我们可以以像素级的置信度相应map中最大的点为准, 找到位置map中对应的位置, 即可直接求解出预测的位置. 也就是:
R~it+δ=R(pi∗(x,y));vit+δ=vi(x∗,y∗)s.t.(x∗,y∗)=argmaxx,y(vi∗ηi)\tilde{R}_i^{t+\delta}=\mathcal{R}(p_i^*(x, y)); ~~~~v_i^{t+\delta} = v_i(x^*, y^*) \\ s.t. ~~~(x^*, y^*) = \arg\max_{x,y}(v_i * \eta_i) R~it+δ=R(pi∗(x,y)); vit+δ=vi(x∗,y∗)s.t. (x∗,y∗)=argx,ymax(vi∗ηi)
其中ηi\eta_iηi为:
ηi(x,y)=λC+(1−λ)S(R(p(x,y)),Rit)\eta_i(x, y)= \lambda\mathcal{C}+(1-\lambda)\mathcal{S}(\mathcal{R(p(x,y))},R_i^t) ηi(x,y)=λC+(1−λ)S(R(p(x,y)),Rit)
表示的是一个penalty map, 其中C\mathcal{C}C是以过去帧位置RitR_i^tRit的几何中心为中心的cos窗函数, S\mathcal{S}S是预测出的位置和原本位置高宽差异的高斯函数, ηi\eta_iηi的作用是为了防止bbox尺寸的突然变化.
损失函数:
与隐式建模类似, 损失函数也是由置信度损失和bbox位置损失组成, 所不同的是该部分预测的是逐像素map, 因此需要逐像素进行计算. 置信度损失仍为focal loss, 位置损失包括中心点的差异与回归损失, 如下式所示:
L=∑x,ylfocal(vi(x,y),vi∗(x,y))+∑x,yI[vi∗(x,y)=1](w(x,y)⋅lreg(pi(x,y),pi∗(x,y)))L = \sum_{x, y}l_{focal}(v_i(x, y), v_i^*(x, y))+\\ \sum_{x, y}\mathbb{I}[v_i^*(x, y) =1](w(x, y) ·l_{reg}(p_i(x, y), p_i^*(x, y))) L=x,y∑lfocal(vi(x,y),vi∗(x,y))+x,y∑I[vi∗(x,y)=1](w(x,y)⋅lreg(pi(x,y),pi∗(x,y)))
w(x,y)w(x, y)w(x,y)就是中心点差异.
1.3 训练和推理
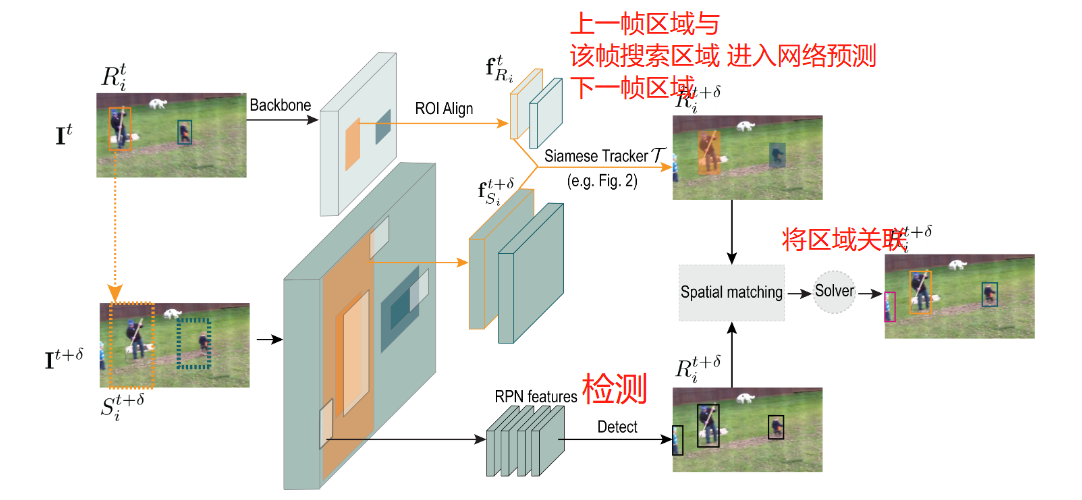
训练是按照端到端的方式训练的, 将Faster RCNN的检测损失与上面的损失结合. 推理也比较普通, 就是利用推理出的R~it+δ\tilde{R}_{i}^{t+\delta}R~it+δ和检测器检测的Rit+δR_{i}^{t+\delta}Rit+δ简单进行匹配即可.
整体流程下图所示:
2. 评价
这篇是很简单的一个笔记, 在SOT+MOT的方法里, 这篇应该也算简洁的, 创新之处在于隐式建模反推位置那一块, 以及逐像素map的思想也值得学习.
相关文章:
[论文阅读笔记19]SiamMOT: Siamese Multi-Object Tracking
这是CVPR2021的一篇文章, 是利用SOT的一些思想来进行MOT的运动估计. 文章地址: 文章 代码地址: 代码 0. 摘要 本文提出了一个孪生(Siamese)式的MOT网络, 该网络用来估计帧间目标的运动. 为了探究运动估计对多目标跟踪的影响, 本文提出了两种运动建模方式: 显式和隐式. 本文在…...
unix高级编程-fork和execve
fork和vfork vfork是老的实现方法又很多问题 vfork #include <sys/types.h> #include <unistd.h> #include <stdlib.h> #include <stdio.h> #include <string.h> #include <signal.h> #include <errno.h> #include <sys/stat.…...
Vue3+Ts+Vite开发插件并发布到npm
依赖版本信息如下: "vue": "^3.2.45""typescript": "~4.7.4""vite": "^4.0.0""less": "^4.1.3""terser": "^5.16.4"npm: 8.1.0node: 16.13.0 目标…...
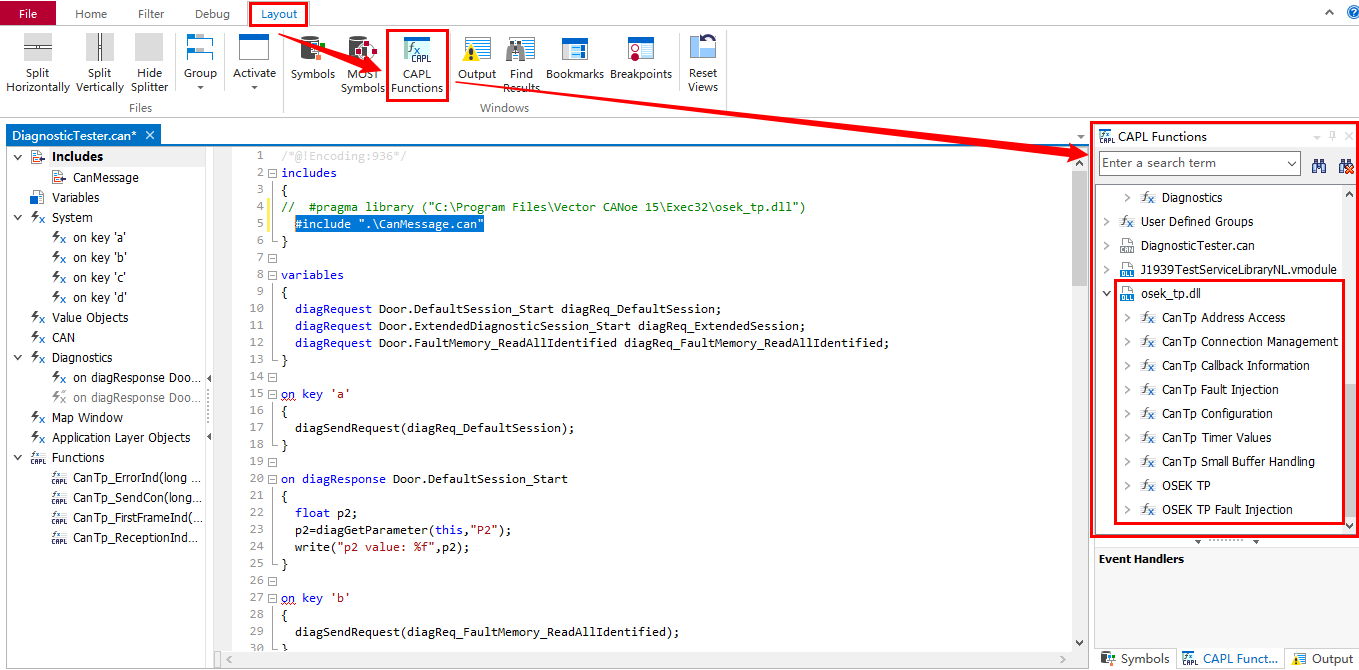
CAN TP层函数介绍
如果想使用CAN TP层函数,首先需要在网络节点或测试节点配置页面的Componets组件一栏添加osek_tp.dll文件。路径为:C:\Program Files\Vector CANoe 15\Exec32 至于节点的CAPL程序内需不需要引用这个dll文件,无所谓,可写可不写。但是如果是其他dll,必须在CAPL程序中引用。为…...
)
Spring架构篇--2.5 远程通信基础Select 源码篇--window--Select.open()
前言:在Socket通信中使用Select 来对NIO 进行实现,那么它们的实现方式是怎样的呢,本文从 Selector.open() 进行第一步的分析; Selector.open() : Selector 类: public static Selector open() throws IOEx…...

WEB静态交互展示【数据mock】
文章目录背景需求分析实现过程1.爬取原有项目数据2.将数据引入项目3.打包收工后记背景 接到公司一个【离谱】的需求,要求把已有的项目做一个演示版本(静态文件版本);本人觉得前端、后端搞个容器包,一个演示版本不就有…...
C#传智:分支Switch与循环While(第四天))
(4)C#传智:分支Switch与循环While(第四天)
一、异常捕获 定义:语法无错,程序因某些原因出现的错误,而不能正常运行。 用try-catch进行捕获。哪行代码可能出现异常,你就踹它一脚。 try { 可能会出现异常的代码; ---- …...

Stable-Baselines 3 部分源代码解读 2 on_policy_algorithm.py
Stable-Baselines 3 部分源代码解读 ./common/on_policy_algorithm.py 前言 阅读PPO相关的源码,了解一下标准库是如何建立PPO算法以及各种tricks的,以便于自己的复现。 在Pycharm里面一直跳转,可以看到PPO类是最终继承于基类,也…...
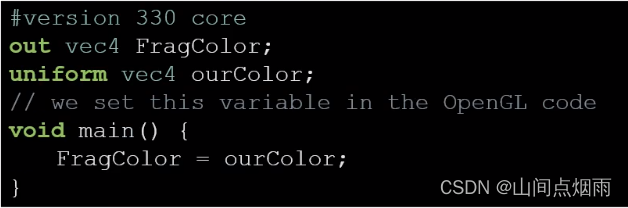
15. Qt中OPenGL的参数传递问题
1. 说明 在OPenGL中,需要使用GLSL语言来编写着色器的函数,在顶点着色器和片段着色器之间需要参数值的传递,且在CPU中的数据也需要传递到顶点着色器中进行使用。本文简单介绍几种参数传递的方式: (本文内容仅个人理解&…...
注意,这本2区SCI期刊最快18天录用,还差一步录用只因犯了这个错
发表案例分享: 2区医学综合类SCI,仅18天录用,录用后28天见刊 2023.02.10 | 见刊 2023.01.13 | Accepted 2023.01.11 | 提交返修稿 2022.12.26 | 提交论文至期刊部系统 录用截图来源:期刊部投稿系统 见刊截图来源:…...
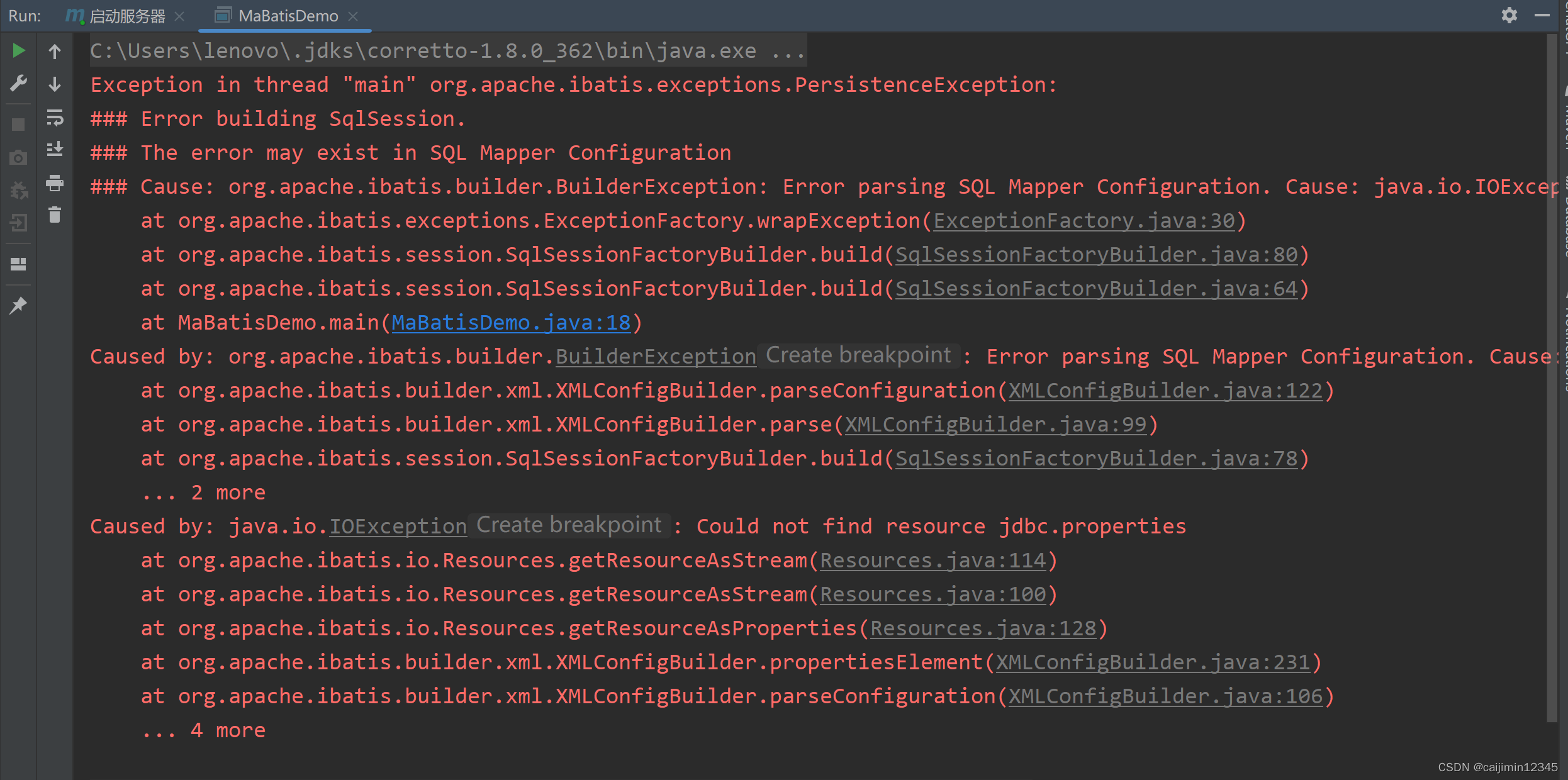
Could not find resource jdbc.properties问题的解决
以如下开头的内容: Exception in thread "main" org.apache.ibatis.exceptions.PersistenceException: ### Error building SqlSession. ### The error may exist in SQL Mapper Configuration 出现以上问题是没有在src/main/resources下创建jdbc.prop…...
也一定为true吗?泛型特点与好处)
【面试题】==与equals区别、Hashcode作用、hashcode相同equals()也一定为true吗?泛型特点与好处
文章目录1. 和 equals 的区别是什么?2.Hashcode的作用3. 两个对象的hashCode() 相同, 那么equals()也一定为 true吗?4.泛型常用特点5.使用泛型的好处?1. 和 equals 的区别是什么? “” 对于基本类型和引用类型 的作…...

Flex布局中的flex属性
1.flex-grow,flex-shrink,flex-basis取值含义 flex-grow: 延申性描述。在满足“延申条件”时,flex容器中的项目会按照设置的flex-grow值的比例来延申,占满容器剩余空间。 取值情况: 取负值无效。取0值表示不…...

SpringBoot + Ant Design Pro Vue实现动态路由和菜单的前后端分离框架
Ant Design Pro Vue默认路由和菜单配置是采用中心化的方式,在 router.config.js统一配置和管理,同时也提供了动态获取路由和菜单的解决方案,并将在2.0.3版本中提供,因到目前为止,官方发布的版本为2.0.2,所以…...

robotframework自动化测试环境搭建
环境说明 win10 python版本:3.8.3rc1 安装清单 安装配置 selenium安装 首先检查pip命令是否安装: C:\Users\name>pipUsage:pip <command> [options]Commands:install Install packages.download Do…...
尚硅谷《Redis7》(小白篇)
尚硅谷《Redis7 》(小白篇) 02 redis 是什么 官方网站: https://redis.io/ 作者 Git Hub https://github.com/antirez 03 04 05 能做什么 06 去哪下 Download https://redis.io/download/ redis中文文档 https://www.redis.com.cn/docu…...

并非从0开始的c++ day6
并非从0开始的c day6二级指针练习-文件读写位运算位逻辑运算符按位取反 ~位于(AND):&位或(OR): |位异或: ^移位运算符左移<<右移>>多维数组一维数组数组名一维数组名传入到函数参数中数组指…...

PMP考前冲刺2.22 | 2023新征程,一举拿证
承载2023新一年的好运让我们迈向PMP终点一起冲刺!一起拿证!每日5道PMP习题助大家上岸PMP!!!题目1-2:1.在新产品开发过程中,项目经理关注到行业排名第一的公司刚刚发布同类型的产品。相比竞品&am…...

RxJava的订阅过程
要使用Rxjava首先要导入两个包,其中rxandroid是rxjava在android中的扩展 implementation io.reactivex:rxandroid:1.2.1implementation io.reactivex:rxjava:1.2.0首先从最基本的Observable的创建到订阅开始分析 Observable.create(new Observable.OnSubscribe<S…...

【2.22】MySQL、Redis、动态规划
认识Redis Redis是一种基于内存的数据库,对数据的读写操作都是在内存中完成的,因此读写速度非常快,常用于缓存,消息队列,分布式锁等场景。 Redis提供了多种数据类型来支持不同的业务场景,比如String(字符串…...

深度解析miniblink49浏览器内核架构设计与企业级打印功能实现原理
深度解析miniblink49浏览器内核架构设计与企业级打印功能实现原理 【免费下载链接】miniblink49 a lighter, faster browser kernel of blink to integrate HTML UI in your app. 一个小巧、轻量的浏览器内核,用来取代wke和libcef 项目地址: https://gitcode.com/…...

终极FFXIV模组管理器:TexTools完全使用指南与实战教程
终极FFXIV模组管理器:TexTools完全使用指南与实战教程 【免费下载链接】FFXIV_TexTools_UI 项目地址: https://gitcode.com/gh_mirrors/ff/FFXIV_TexTools_UI 你是否厌倦了在《最终幻想14》中与其他玩家穿着相同的装备?是否梦想着为你的光之战士…...

如何用roop-unleashed三分钟制作专业级AI换脸视频:零门槛人脸替换终极指南
如何用roop-unleashed三分钟制作专业级AI换脸视频:零门槛人脸替换终极指南 【免费下载链接】roop-unleashed Evolved Fork of roop with Web Server and lots of additions 项目地址: https://gitcode.com/gh_mirrors/ro/roop-unleashed 还在为复杂的AI换脸工…...

DeepXDE终极指南:5分钟快速掌握科学机器学习神器
DeepXDE终极指南:5分钟快速掌握科学机器学习神器 【免费下载链接】deepxde A library for scientific machine learning and physics-informed learning 项目地址: https://gitcode.com/gh_mirrors/de/deepxde 还在为复杂的偏微分方程求解而头疼吗࿱…...

掌握Sunshine虚拟手柄配置:实现完美游戏控制体验
掌握Sunshine虚拟手柄配置:实现完美游戏控制体验 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine Sunshine作为自托管的游戏串流服务器,其虚拟手柄配置功能是…...

深入浅出arm7架构下大模型API调用,Taotoken多模型聚合平台接入指南
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 深入浅出arm7架构下大模型API调用,Taotoken多模型聚合平台接入指南 对于在arm7架构设备上进行开发的工程师而言&#x…...

FigmaCN:3分钟破解设计师的语言障碍,工作效率提升40%的秘密武器
FigmaCN:3分钟破解设计师的语言障碍,工作效率提升40%的秘密武器 【免费下载链接】figmaCN 中文 Figma 插件,设计师人工翻译校验 项目地址: https://gitcode.com/gh_mirrors/fi/figmaCN 还在为Figma的英文界面而烦恼吗?每次…...

英雄联盟终极自动化工具:5分钟快速上手League Akari完整指南
英雄联盟终极自动化工具:5分钟快速上手League Akari完整指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 还在为繁琐的游戏操作…...

解锁你的音乐自由:3分钟掌握qmc-decoder解密QQ音乐加密文件
解锁你的音乐自由:3分钟掌握qmc-decoder解密QQ音乐加密文件 【免费下载链接】qmc-decoder Fastest & best convert qmc 2 mp3 | flac tools 项目地址: https://gitcode.com/gh_mirrors/qm/qmc-decoder 你是否曾经下载了QQ音乐的高品质歌曲,却…...

Wand-Enhancer:免费解锁WeMod Pro功能的完整解决方案
Wand-Enhancer:免费解锁WeMod Pro功能的完整解决方案 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod专业版的订阅费用而犹豫吗&…...