如何在Gazebo中实现多机器人编队仿真
文章目录
- 前言
- 一、仿真前的配置
- 二、实现步骤
- 1.检查PC和台式机是否通讯成功
- 2.编队中对单个机器人进行独立的控制
- 3、对机器人进行编队控制
前言
实现在gazebo仿真环境中添加多个机器人后,接下来进行编队控制,对具体的实现过程进行记录。
一、仿真前的配置
本文的多机器人编队,在turtlebot3单个机器人的建图、导航等功能的基础上进行,需要在自己的远程PC和台式机中安装配置以下功能包
(1)turtlebot3单个机器人的配置:可以看之前的文章双系统ubuntu20.04(neotic版本)从0实现Gazebo仿真slam建图
(2)进行多机器人编队仿真前需要将已经写好的FourTB3s功能包配置在自己的工作空间src文件夹下,且成功编译,如果不知道怎么编译可以看这篇ROS如何将拷贝的功能包成功运行在自己的工作空间中
(3)需要在自己的src文件夹中打开终端输入:
git clone https://gitee.com/kay2022/turbot3.git
下载一个turbot3的包,如果git clone遇到问题可以参考双系统 + Ubuntu20.04 + ros2 (foxy) git clone -b连接不成功的解决记得下载完成后要重新编译。
二、实现步骤
1.检查PC和台式机是否通讯成功
【PC端】 终端输入:roscore
【台式机】终端输入:rostopic list
通讯成功如下图(具体通信配置过程可参考:虚拟机作为master远程控制台式机中的机器人在仿真环境中进行slam地图构建与自主导航)
【PC显示】
【台式机显示】

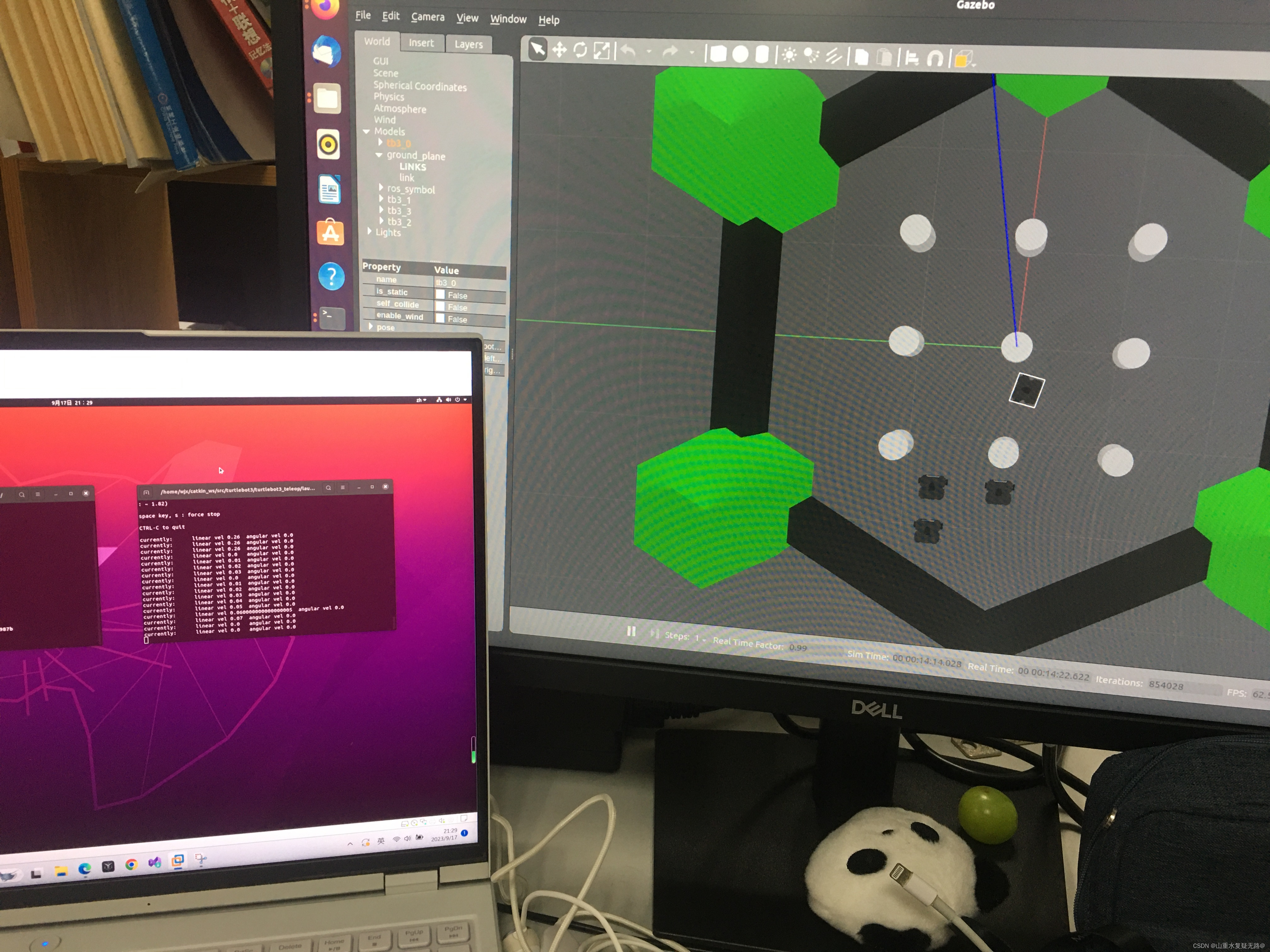
2.编队中对单个机器人进行独立的控制
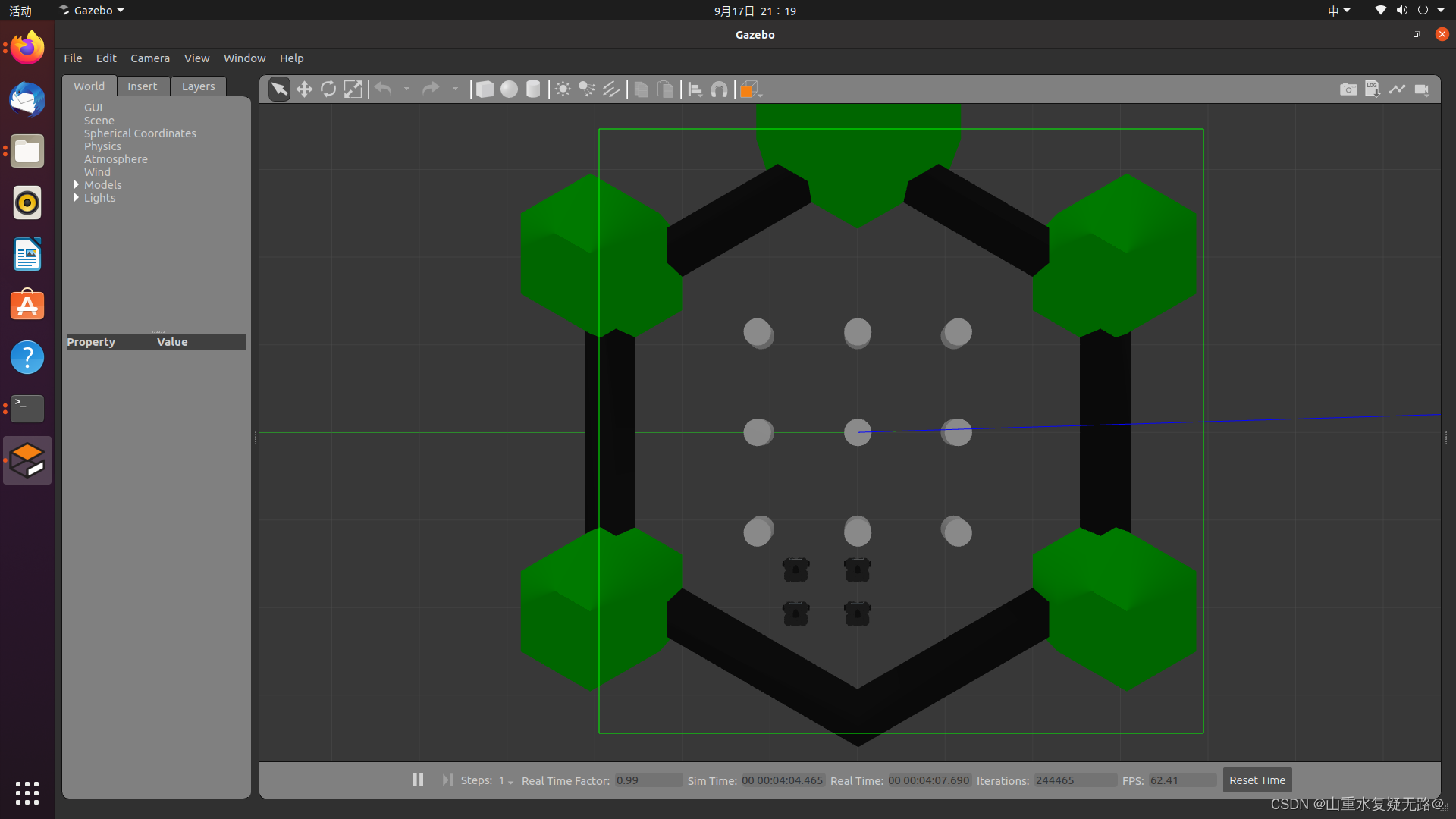
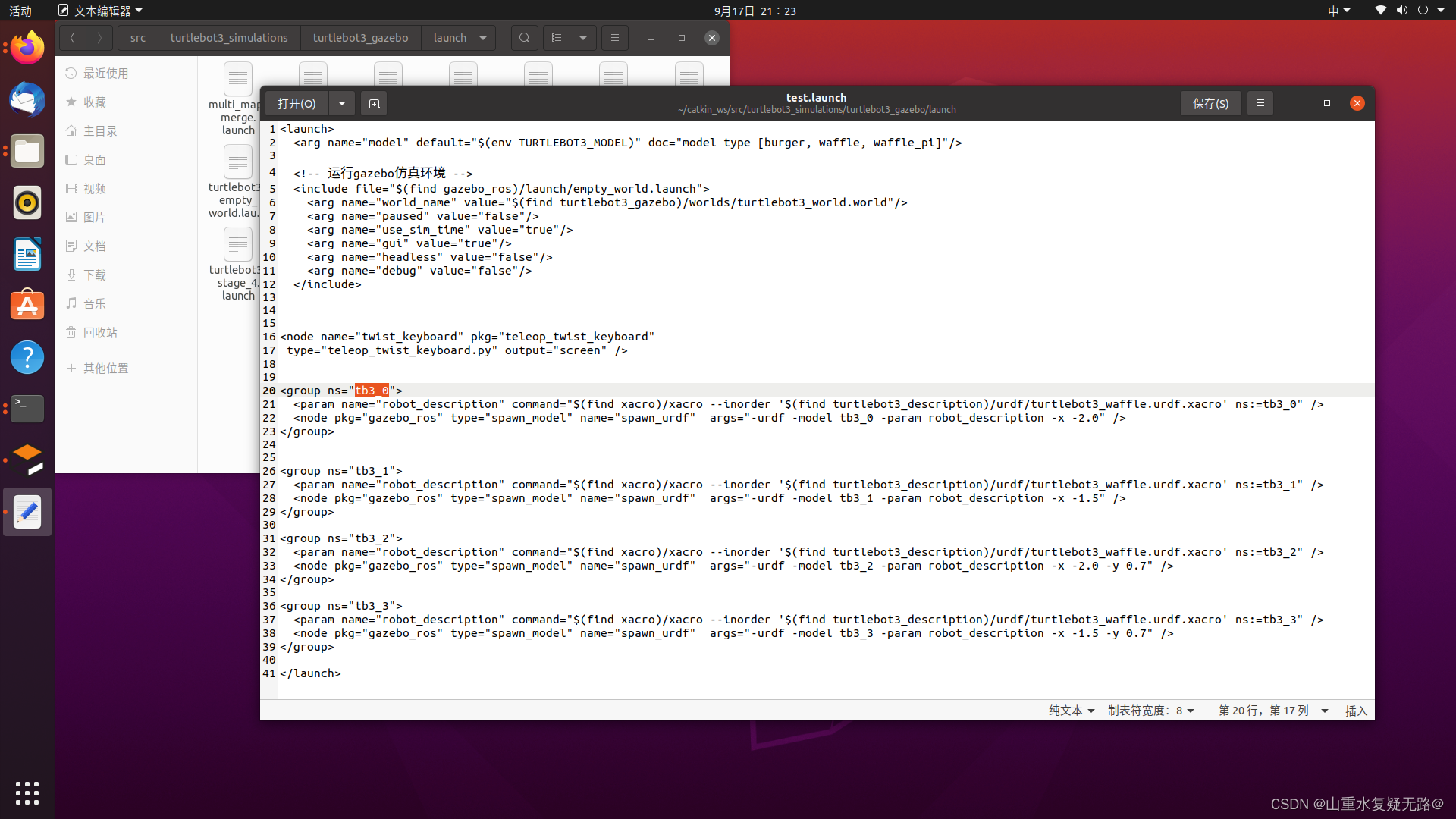
【台式机】终端输入:roslaunch turtlebot3_gazebo test.launch 启动gazebo仿真环境(四个机器人,可以增添或减少可参考文章:在gazebo仿真环境中加载多个机器人)
加载成功界面:
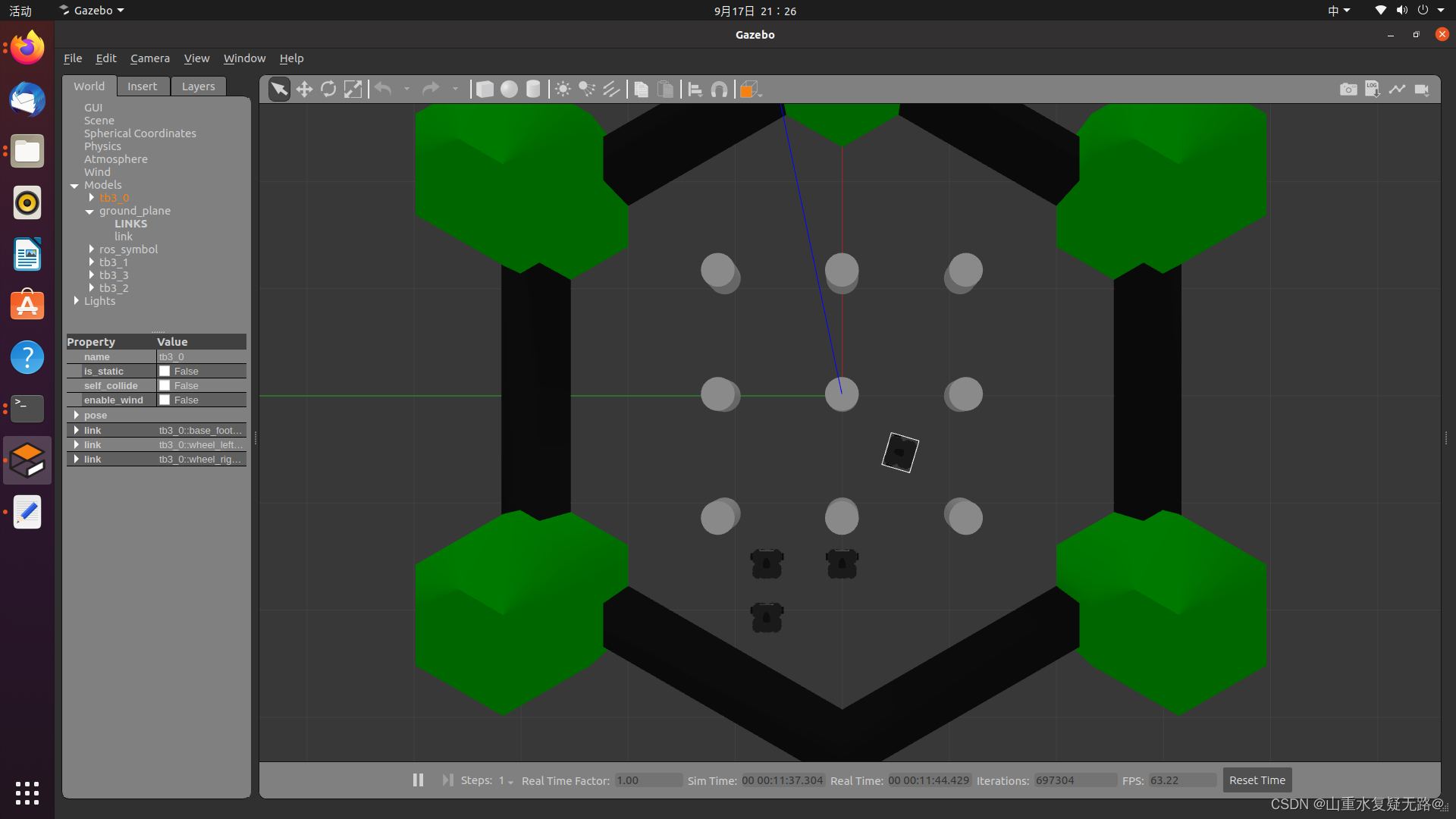
【PC】终端输入:ROS_NAMESPACE=tb3_0 roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
注意:ROS_NAMESPACE=“后面接想要控制的机器人的名字”,这个名字要与写的加载gazebo的launch中起的机器人名字一致,启动后可通过键盘控制单个机器人移动。
可以在台式机gazebo的仿真环境中,指明某个机器人控制其独立的移动,如图控制tb3_0单个机器人的移动,若控制其他机器人同理。
3、对机器人进行编队控制
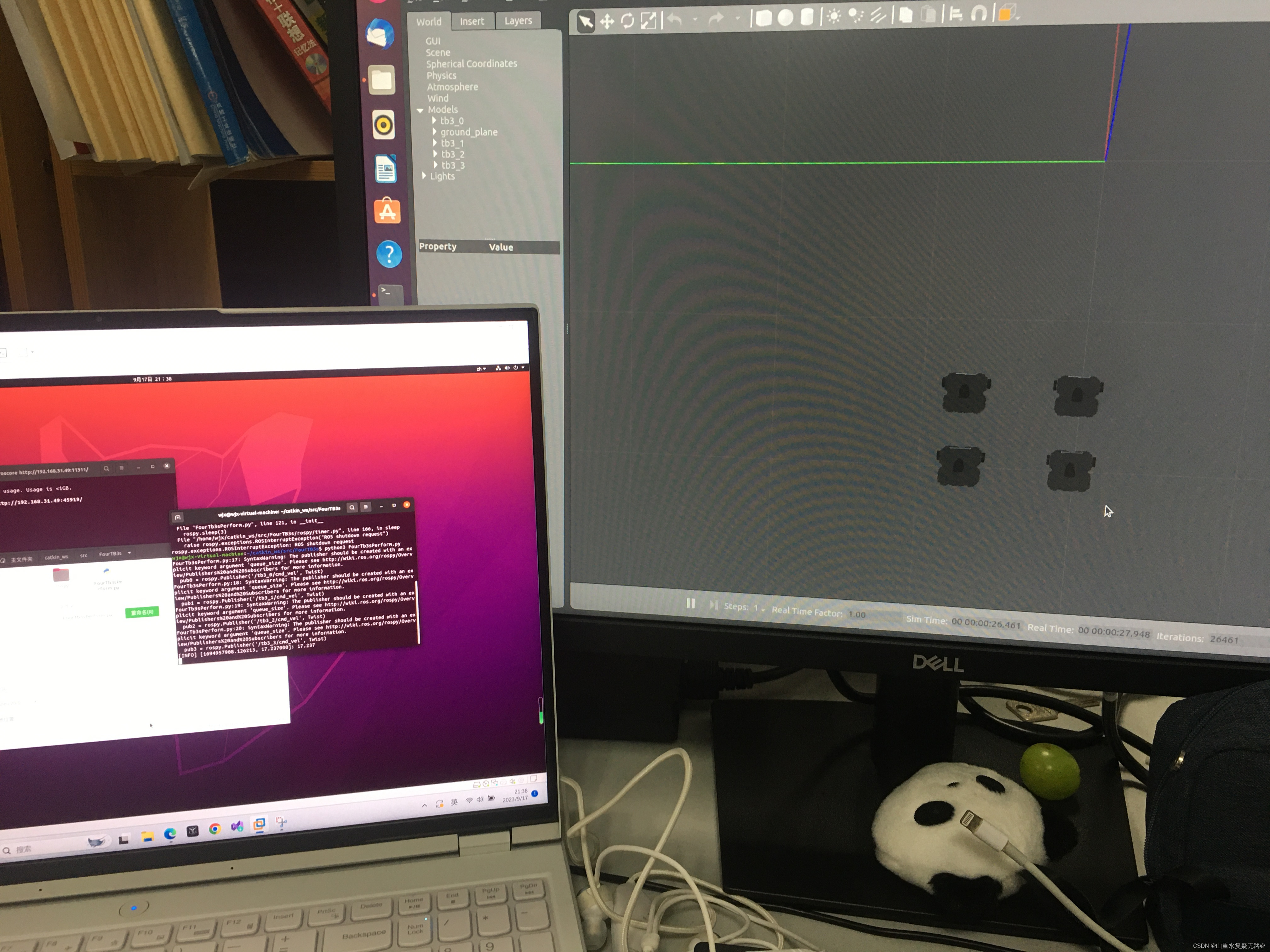
【PC】打开FourTB3文件夹,并在该文件夹下打开终端,输入:python3 FourTB3sPerform.py为方便机器人进行编队运动,可以将gazebo环境中的障碍物去掉
 【PC端显示】
【PC端显示】

【台式机显示】
【总览】
相关文章:
如何在Gazebo中实现多机器人编队仿真
文章目录 前言一、仿真前的配置二、实现步骤1.检查PC和台式机是否通讯成功2.编队中对单个机器人进行独立的控制3、对机器人进行编队控制 前言 实现在gazebo仿真环境中添加多个机器人后,接下来进行编队控制,对具体的实现过程进行记录。 一、仿真前的配置…...

迅为iTOP-iMX6QPLUS-Android6.0下uboot添加网卡驱动
本文档介绍在 iTOP-iMX6Q 和 iTOP-iMX6Q-PLUS 安卓 6.0 的 uboot 上添加网卡驱 动,添加完网卡驱动以后,uboot 就可以正常使用网络了。 1 具体步骤 1.1 修改 mx6sabre_common.h 文件 在 iTOP-iMX6_android6.0.1 源码目录下输入以下命令,打…...
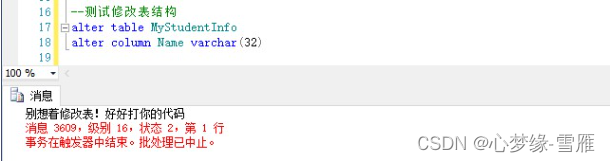
sql server 触发器的使用
看数据库下的所有触发器及状态 SELECT a.name 数据表名 , sysobjects.name AS 触发器名 , sysobjects.crdate AS 创建时间 , sysobjects.info , sysobjects.status FROM sysobjects LEFT JOIN ( SELECT * FROM sysobjects WHERE xtype U ) AS a ON sysobjects.parent_obj a.…...
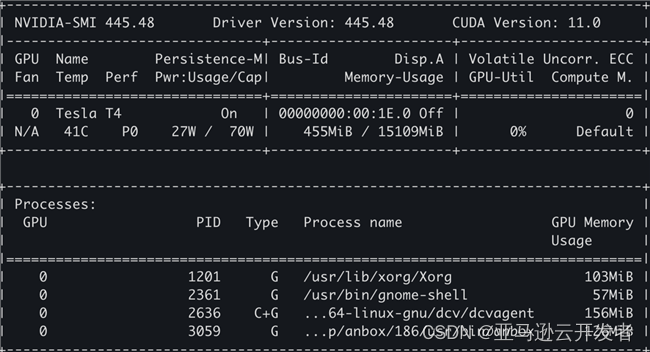
使用亚马逊云服务器在 G4 实例上运行 Android 应用程序
随着 Android 应用程序和游戏变得越来越丰富,其中有些甚至比 PC 上的软件更易于使用和娱乐,因此许多人希望能够在云上运行 Android 游戏或应用程序,而在 EC2 实例上运行 Android 的解决方案可以让开发人员更轻松地测试和运行 Android 应用程序…...
Direct3D融合技术
该技术能使我们将当前要进行光栅化的像素的颜色与先前已已光栅化并处于同一位置的像素的颜色进行合成,即将正在处理的图元颜色值与存储在后台缓存中的像素颜色值进行合成(混合),利用该技术我们可得到各种各样的效果,尤其是透明效果。 在融合…...
)
【计算机网络】信号处理接口 Signal API(1)
收发信号思想是 Linux 程序设计特性之一,一个信号可以认为是一种软中断,通过用来向进程通知异步事件。 本文讲述的 信号处理内容源自 Linux man。本文主要对各 API 进行详细介绍,从而更好的理解信号编程。 signal 遵循 C11,POSIX.…...

贝叶斯滤波计算4d毫米波聚类目标动静属性
机器人学中有些问题是二值问题,对于这种二值问题的概率评估问题可以用二值贝叶斯滤波器binary Bayes filter来解决的。比如机器人前方有一个门,机器人想判断这个门是开是关。这个二值状态是固定的,并不会随着测量数据变量的改变而改变。就像门…...

华为hcie认证考试怎么考?
华为HCIE认证考试怎么考? 前文腾科也说了HCIE认证考试的难度会比较大,具体是难在哪里呢?华为HCIE认证的考试需要考一门笔试,笔试主要是单选、多选、判断、填空、拖拽这几个题型,考试时长一般是一个半小时,…...
)
vue +element 删除按钮操作 (删除单个数据 +删除页码处理 )
1.配置接口deleteItemById: "/api/goods/deleteItemById", //删除商品操作 2.get请求接口 // 删除接口 后台给我们 返iddeleteItemById(params){return axios.get(base.deleteItemById,{params})}3.异步请求接口 async deleteItemById(id){let res await this.…...
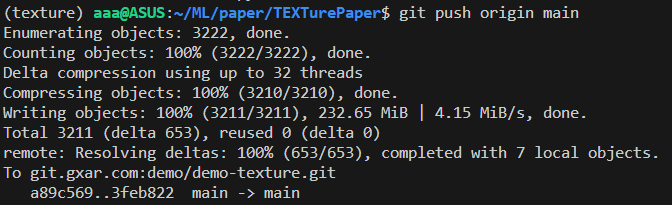
更新GitLab上的项目
更新GitLab上的项目 如有需要,请参考这篇:上传项目到gitlab上 1.打开终端,进入到本地项目的根目录。 2.如果你还没有将远程GitLab仓库添加到本地项目,你可以使用以下命令: 比如: git remote add origin …...
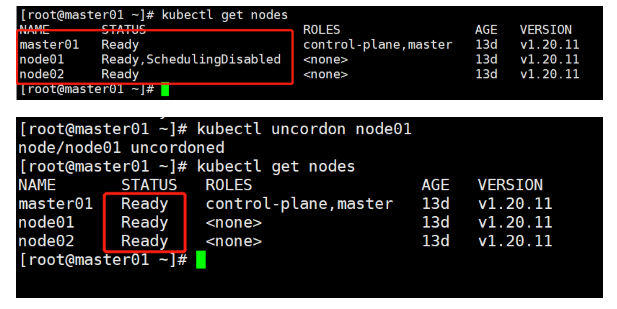
K8S群集调度
K8S群集调度 一、调度约束1.概述2.Pod 启动典型创建过程(工作机制 )3.调度过程4.Predicate 的常见的算法5.常见的优先级选项6.指定调度节点: 二、亲和性1.节点亲和性2.Pod 亲和性3.键值运算关系4.示例5.Pod亲和性与反亲和性6.使用 Pod 反亲和…...
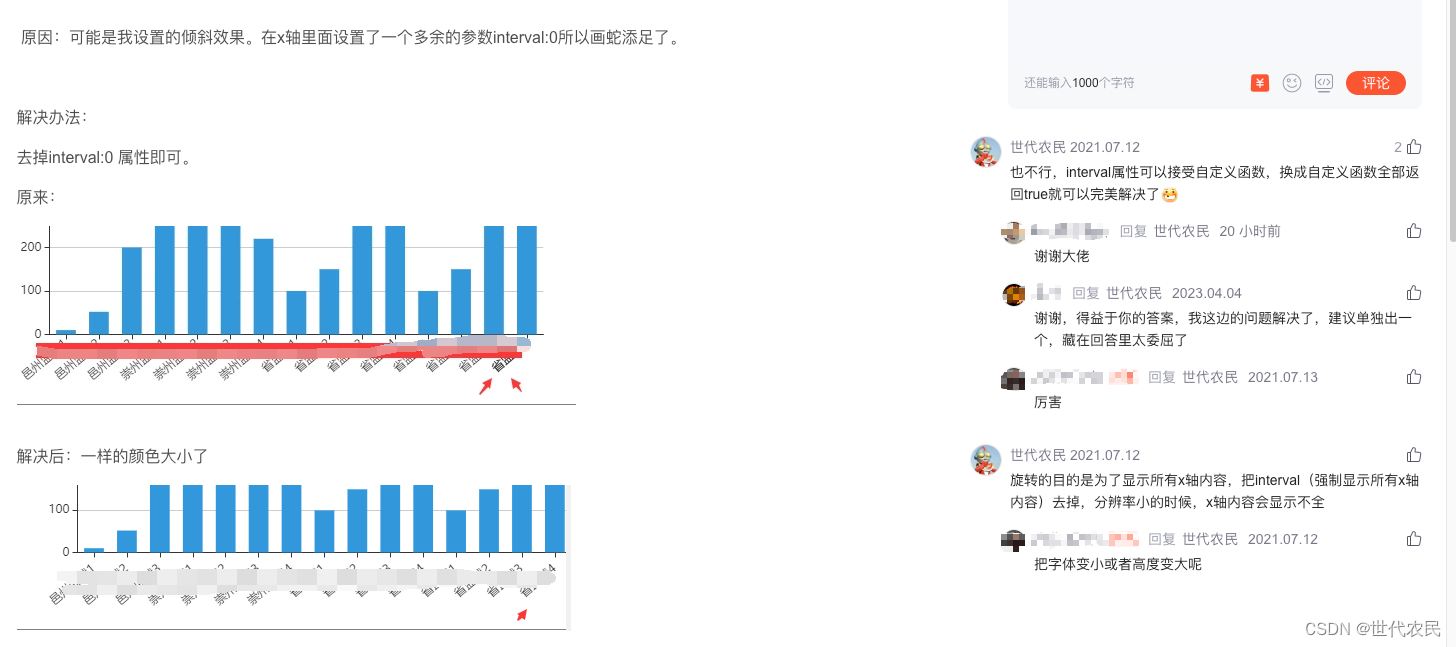
完美解决Echarts X坐标轴下方文字最后一个字体加粗颜色加深的问题
之前用Echarts画图的时候,X坐标轴最后一个字存在自动加粗的问题。也是在网上找过解决办法没有找到,后面自己研究明白了后,在某篇文章下评论了如何解决。但是好像大家没有看评论的习惯,所以单独拿出来一篇文章,希望能给…...
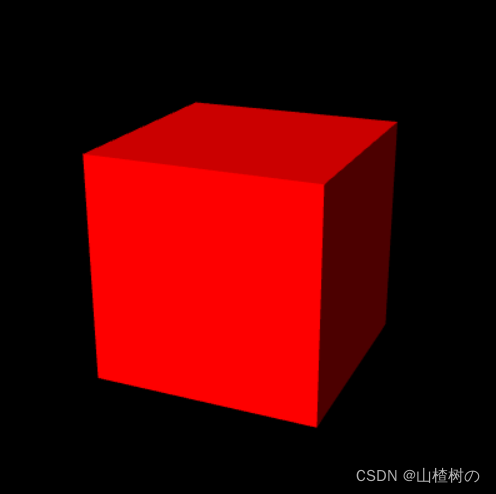
WebGL 计算平行光、环境光下的漫反射光颜色
目录 光照原理 光源类型 平行光 点光源 环境光 反射类型 漫反射 漫反射光颜色 计算公式 环境反射 环境反射光颜色 表面的反射光颜色(漫反射和环境反射同时存在时)计算公式 平行光下的漫反射 根据光线和法线方向计算入射角θ(以便…...
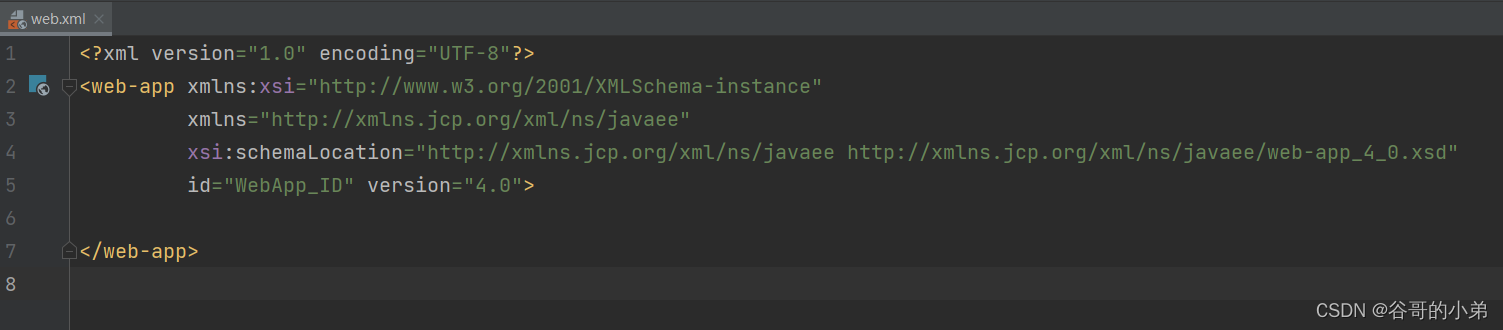
解决SpringMVC在JSP页面取不到ModelAndView中数据
版权声明 本文原创作者:谷哥的小弟作者博客地址:http://blog.csdn.net/lfdfhl 问题描述 ModelAndView携带数据跳转到指定JSP页面后在该页面通过EL表达式取不到原本存放在ModelAndView中的数据。 问题原因 在IDEA中创建Maven工程时web.xml中默认的约束…...
Spring 6.0 新特性
文章目录 Spring的发展历史AOTGraalVMSpringBoot实战AOTRuntimeHints案例分析RuntimeHintsRegistrar SpringBoot中AOT核心代码 Spring的发展历史 AOT Spring 6.0的新特性Ahead of Time(AOT)编译是一种技术,可以提前将Spring应用程序编译成原…...
计算机竞赛 深度学习+opencv+python实现昆虫识别 -图像识别 昆虫识别
文章目录 0 前言1 课题背景2 具体实现3 数据收集和处理3 卷积神经网络2.1卷积层2.2 池化层2.3 激活函数:2.4 全连接层2.5 使用tensorflow中keras模块实现卷积神经网络 4 MobileNetV2网络5 损失函数softmax 交叉熵5.1 softmax函数5.2 交叉熵损失函数 6 优化器SGD7 学…...

软件过程能力成熟度评估——CSMM认证
CSMM认证又称为“软件过程能力过程成熟度评估”,由中国电子技术标准化研究院联合五十余家产学研用相关方结合我国实际,自主制定的团体标准,于2021年6月8号发布,目的是为了帮助国内软件企业对自身的软件能力进行评估和判断…...

学内核之二十一:系统调用栈结构分析
目录 一 构建分析环境 二 栈的位置 三 栈开头8字节 四 寄存器环境 五 R4和R5 六 如何确定系统调用的具体函数 一 构建分析环境 为了分析方便,做了如下测试环境: 内核实现一个简单的创建字符设备的驱动 应用层实现一个c程序,操作为打开内…...

互联网3.0 数字原生——数物虚实多维细粒度泛在融合
随着计算机、宽带网、通信技术的飞速发展,互联网技术和软硬件系统也不断演进,催生了一场前所未有的数字化革命。从Web1.0到Web3.0,以及虚拟现实、人工智能和数字孪生等领域的崛起,每一步都勾画出了一个崭新的数字未来,…...

实现AIGC更好的数据存力,这家科技巨头为我们指明了方向
存力即数据存储能力 蕴藏着巨大的发展机会 【全球存储观察 | 热点关注】 2023年,全球被ChatGPT的热潮席卷,拥抱AIGC的创新赛道成为众多企业的新选择。 全球存储观察分析指出,影响AIGC发展的三大因素也日益凸显,即算…...

告别硬件依赖:用Virtual ZPL Printer构建完整的标签打印测试环境
告别硬件依赖:用Virtual ZPL Printer构建完整的标签打印测试环境 【免费下载链接】Virtual-ZPL-Printer An ethernet based virtual Zebra Label Printer that can be used to test applications that produce bar code labels. 项目地址: https://gitcode.com/gh…...

Keyviz完全指南:5分钟掌握实时键鼠可视化技巧
Keyviz完全指南:5分钟掌握实时键鼠可视化技巧 【免费下载链接】keyviz Keyviz is a free and open-source tool to visualize your keystrokes ⌨️ and 🖱️ mouse actions in real-time. 项目地址: https://gitcode.com/gh_mirrors/ke/keyviz 你…...

基于Vercel AI SDK与Next.js的聊天机器人模板开发实战
1. 项目概述:一个开箱即用的AI聊天机器人模板 如果你正在寻找一个能快速启动、功能齐全且易于定制的AI聊天机器人项目,那么Vercel官方出品的这个Chatbot模板绝对值得你花时间研究。它不是一个简单的Demo,而是一个生产就绪的、基于现代Web技术…...

底特律汽车产业转型:从全球平台战略到创新生态重构
1. 从废墟中重生:底特律汽车产业的韧性复苏如果你在2010年前后关注过全球汽车产业,或者对美国的工业经济史稍有了解,那么“底特律”这个名字,在当时几乎就是“衰败”与“绝望”的同义词。这座曾经的“汽车之城”,在200…...

企业内网虚拟机如何通过Taotoken安全接入多模型API
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内网虚拟机如何通过Taotoken安全接入多模型API 在许多企业的技术架构中,开发与测试环境常部署于内网虚拟机中。这些…...

Nihonga风格AI生成稀缺资源包泄露:含17世纪狩野派笔触扫描集、200+古籍《本朝画史》描述性Prompt语料库、及唯一通过日本文化厅AI伦理审查的商用授权协议范本
更多请点击: https://intelliparadigm.com 第一章:Nihonga风格AI生成资源包的伦理边界与文化权重 文化符号的不可压缩性 Nihonga(日本画)并非仅由矿物颜料、金箔或桑皮纸构成的技术集合,其内嵌着神道自然观、物哀美学…...

基于WebSocket的Web即时通讯后端架构设计与实战部署指南
1. 项目概述:一个面向开发者的Web即时通讯解决方案最近在折腾一个内部协作工具,需要集成一个稳定、可控且能深度定制的即时通讯模块。市面上成熟的IM SDK很多,但要么是黑盒,出了问题排查困难;要么是功能臃肿࿰…...

3个核心功能+5种使用场景:FanControl帮你打造Windows平台专属散热系统
3个核心功能5种使用场景:FanControl帮你打造Windows平台专属散热系统 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitH…...

AI如何重塑科学创新:从构思成本坍塌到知识组合爆炸
1. 科学创新的范式转移:从“不确定性”到“风险”在过去的科研实践中,我们常常面临一个根本性的困境:不确定性。这并非指我们不知道某个实验的结果,而是指我们连可能的结果是什么、其发生的概率有多大,都无从知晓。这就…...

别再让CPU风扇狂转了!手把手教你为Edge/Chrome解锁B站HEVC/AV1硬解,省电又流畅
别再让CPU风扇狂转了!解锁浏览器硬解B站视频的终极指南 每次打开B站看视频,笔记本风扇就开始"起飞"?明明只是看个1080P视频,CPU占用率却飙升到80%以上?这很可能是因为你的浏览器正在使用软件解码(…...