ardupilot的编译过程
环境
树莓派4b
ubuntu20.04
git 2.25.1
python3.8.10
pixhawk2.4.8
下载源码
(已经配置好git环境和ssh)
git clone --recurse-submodules git@github.com:ArduPilot/ardupilot.gitcd ardupilot
git status
使用git status检查是否下载完整
如果不完整,则更新下载
一般更新
git submodule update --init --recursive
强制更新
git submodule update --init --recursive –force
检查根目录下的modules文件夹下的源码是否下载完整,否则更新下载
安装编译需要的包
在ardupilot根目录下操作
设置安装文件成可执行文件
cd Tools/environment_install/
sudo chmod 777 install-prereqs-ubuntu.sh
执行
install-prereqs-ubuntu.sh -y
使环境生效
. ~/.profile
配置waf编译功能
在根目录下就又waf文件,该文件依赖python3环境运行
设置waf文件为可执行文件
sudo chmod 777 waf
查看waf版本,有版本号输出则已经配置成功
./waf --version
如果报错
‘python3\r’: No such file or directory
则需要安装dos2unix并设置waf为linux脚本
sudo apt install dos2unix
dos2unix waf
安装交叉编译器
pixhawk使用基于 ARM 架构的 STM32 芯片,ubuntu自带的 gcc 编译器是针对 X86 架构的,所以需要安装 gcc-arm-none-eabi
使用命令 uname -a 可知树莓派是基于aarch64架构的
从官网下载安装包
在/usr/local下新建arm文件夹,使用cp或mv命令拷贝压缩包到arm下
mkdir arm
解压
tar -xjvf gcc-arm-none-eabi-10.3-2021.10-aarch64-linux.tar.bz2
命令行直接配置到profile文件中
exportline="export PATH=/usr/local/arm/gcc-arm-none-eabi-10.3-2021.10/bin:\$PATH"
或者修改/etc/profile文件
sudo gedit /etc/profile
添加以下命令到最后一行
export PATH=$PATH:/usr/local/arm/gcc-arm-none-eabi-10.3-2021.10/bin
使环境生效
source ~/.profile
查看arm-none-eabi-gcc版本
arm-none-eabi-gcc --version
失败则重启树莓派,不行就查看一下配置
使用waf编译源码
在编译固件之前需要选择目标平台,ArduPilot支持多种不同的硬件平台,包括Pixhawk、APM等,根据piaxhawk版本配置编译环境, pixhawk2.4.8为fmuv3
./waf configure --board bebop --static # Bebop or Bebop2
./waf configure --board edge # emlid edge
./waf configure --board fmuv3 # 3DR Pixhawk 2 boards
./waf configure --board navio2 # emlid navio2
./waf configure --board Pixhawk1 # Pixhawk1
./waf configure --board CubeBlack # Hex/ProfiCNC Cube Black (formerly known as Pixhawk 2.1)
./waf configure --board Pixracer # Pixracer
./waf configure --board skyviper-v2450 # SkyRocket's SkyViper GPS drone using ChibiOS
./waf configure --board sitl # software-in-the-loop simulator
./waf configure --board sitl --debug # software-in-the-loop simulator with debug symbols使用以下命令可以在ArduPilot上获得受支持的板的列表
./waf list_boards
配置fmuv3需要的环境
./waf configure --board fmuv3
以下是ardupilot支持的飞控固件
./waf copter # All multirotor types
./waf heli # Helicopter types
./waf plane # Fixed wing airplanes including VTOL
./waf rover # Ground-based rovers and surface boats
./waf sub # ROV and other submarines
./waf antennatracker # Antenna trackers编译copter
./waf copter
编译成功

编译结果会在根目录下的build文件夹中生成
可以在build/目标平台目录下找到生成的固件文件
ArduPilot的固件是APJ文件和HEX文件:
- apj文件:这些是“ArduPilot JSON”固件,其中包含可以由ArduPilot兼容的地面站软件加载的固件。
- hex文件:这些是Intel十六进制格式的固件,用于使用DFU加载工具加载。这些用于不带有ArduPilot兼容引导加载程序的电路板。
- _with_bl.hex文件:这些是内置引导加载程序的十六进制文件的变体。它们可用于使用DFU加载工具一步安装引导加载程序和ArduPilot车辆固件。
相关文章:
ardupilot的编译过程
环境 树莓派4b ubuntu20.04 git 2.25.1 python3.8.10 pixhawk2.4.8 下载源码 (已经配置好git环境和ssh) git clone --recurse-submodules gitgithub.com:ArduPilot/ardupilot.gitcd ardupilotgit status使用git status检查是否下载完整 如果不完整&a…...
Unity中Shader实现模板测试Stencil
文章目录 前言一、UI中的遮罩1、Mask ——> 模板测试2、RectMask2D ——> UNITY_UI_CLIP_RECT 二、模板缓冲区Stencil一般是和Pass平行的部分,Pass部分写的是颜色缓冲区Stencil:Comp(比较操作)Pass(模版缓冲区的更新) 三、实际使用1、在…...

多线程与并发
多线程与高并发 线程的创建方式1.继承Thread类 重写run方法2.实现Runnable接口 重写run方法3. 实现Callable 重写call方法,配合FutureTask 线程的使用1.线程的状态1.1. 传统操作系统层面5种状态1.2.Java中给线程准备的6种状态 2.线程的常用方法2.1 获取当前线程2.2 …...

手写call方法
Function.prototype.myCallfunction (context,args) {console.log(arguments)//context 表示call里面的第一个参数也就是需要改变this指向的那个对象。//this表示这个方法//把这个方法挂到需要改变指向的对象身上调用,相当于把this指向了这个对象身上,从…...
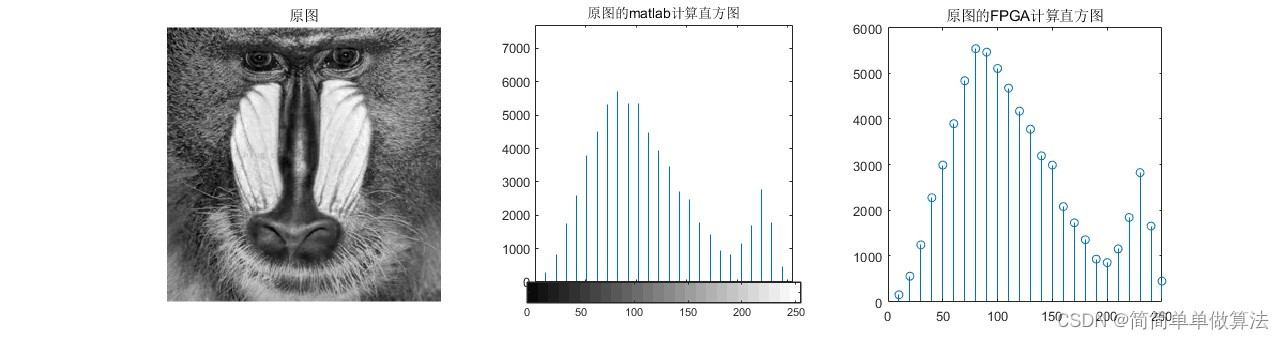
基于FPGA的图像直方图统计实现,包括tb测试文件和MATLAB辅助验证
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 4.1、图像数据传输 4.2、直方图统计算法 4.3、时序控制和电路设计 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 vivado2019.2 matlab2022a 3.部分核心程序 timescal…...
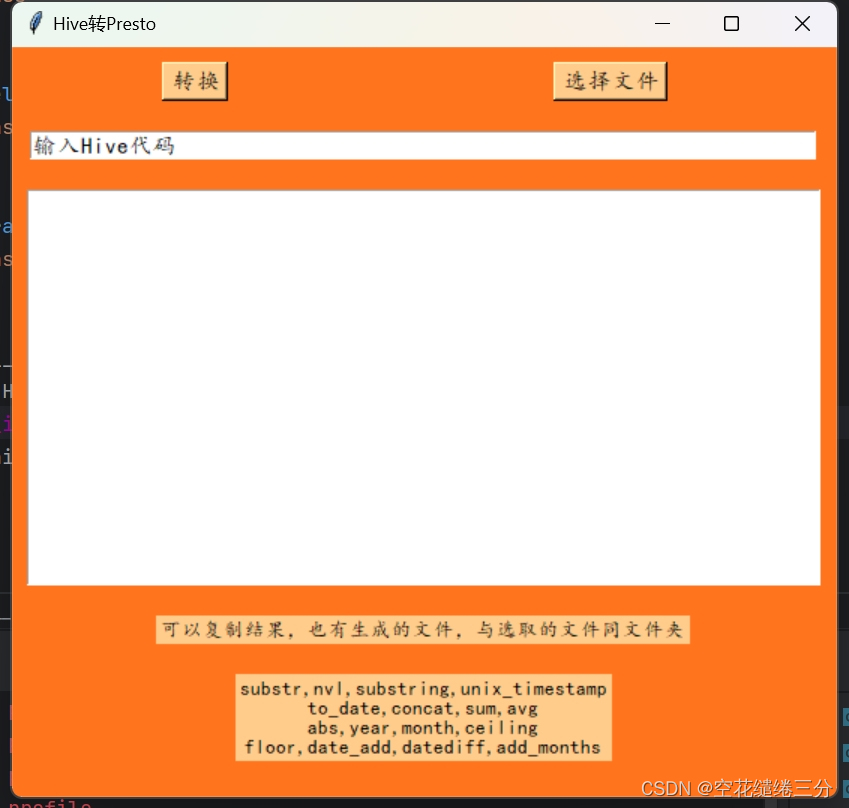
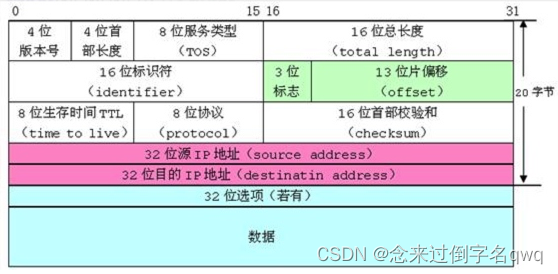
数据库:Hive转Presto(一)
本人因为工作原因,经常使用hive以及presto,一般是编写hive完成工作,服务器原因,presto会跑的更快一些,所以工作的时候会使用presto验证结果,所以就要频繁hive转presto,为了方便,我用…...

Responder
环境准备 操作系统:Kali Linux工具:responder,john,evil-winrm PS:输入以下命令解决靶场环境无法打开问题 #echo "<靶机IP> unika.htb">>/etc/hostsresponder工具 [Kali 官网] 手册地址:https://www.kali.org/tools/responder/ 摘要: This package c…...
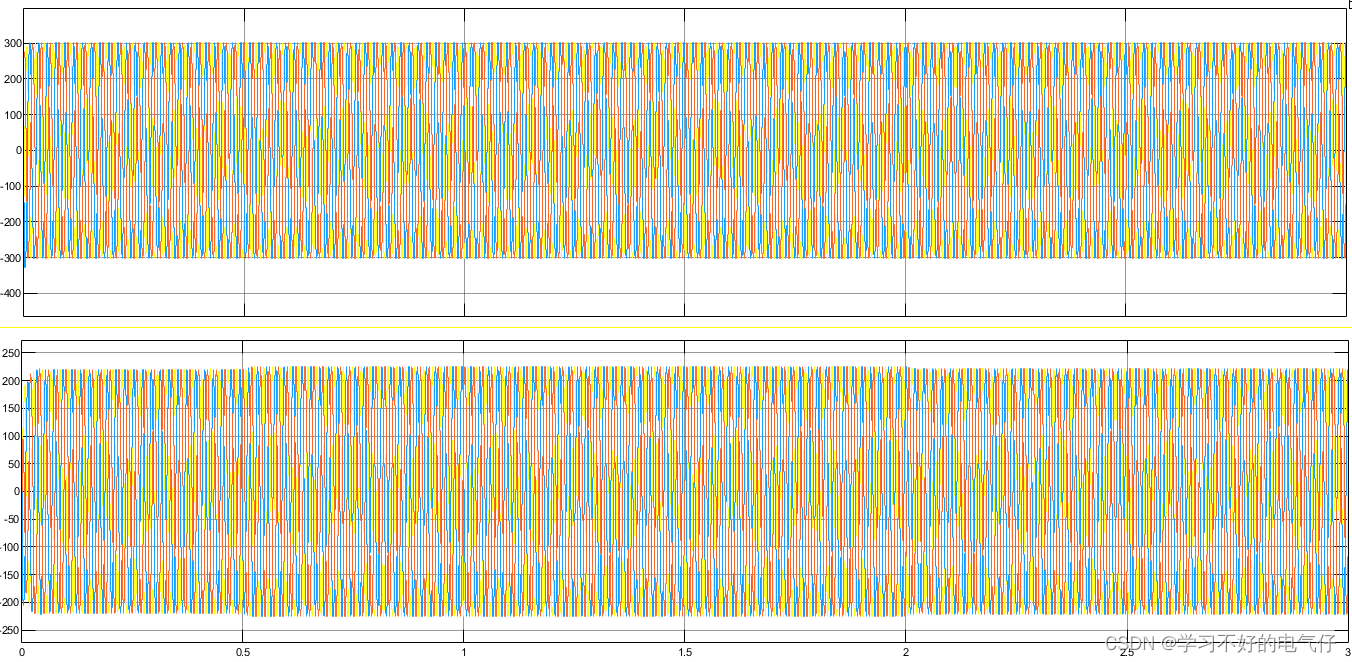
基于下垂控制的并网逆变器控制MATLAB仿真模型
微❤关注“电气仔推送”获得资料(专享优惠) 主要模块: 建议使用MATLAB2021b及以上版本打开! 功率计算模块、下垂控制模块、电压电流双环控制模块、虚拟阻抗压降模块 扰动设置: 在0.5秒到2秒始端设置0.25Hz的电网频…...

android获取RAM、CPU频率、系统版本、CPU核数
参考链接: https://www.jianshu.com/p/76d68d13c475 https://github.com/matthewYang92/Themis 获取CPU频率、核数的逻辑,是通过文件操作实现的,Android是基于Linux系统的,所以该方式针对不同的手机都是可靠的操作方式。 RAM&am…...
微信小程序python+nodejs+php+springboot+vue 讲座预约系统
讲座预约管理系统的用户是系统最根本使用者,按需要分析系统包括用户:学生、管理员。 管理员通过后台的登录页面,选择管理员权限后进行登录,管理员的权限包括学生信息管理和文章公告管理。讲座公告管理,添加讲座公告信息…...
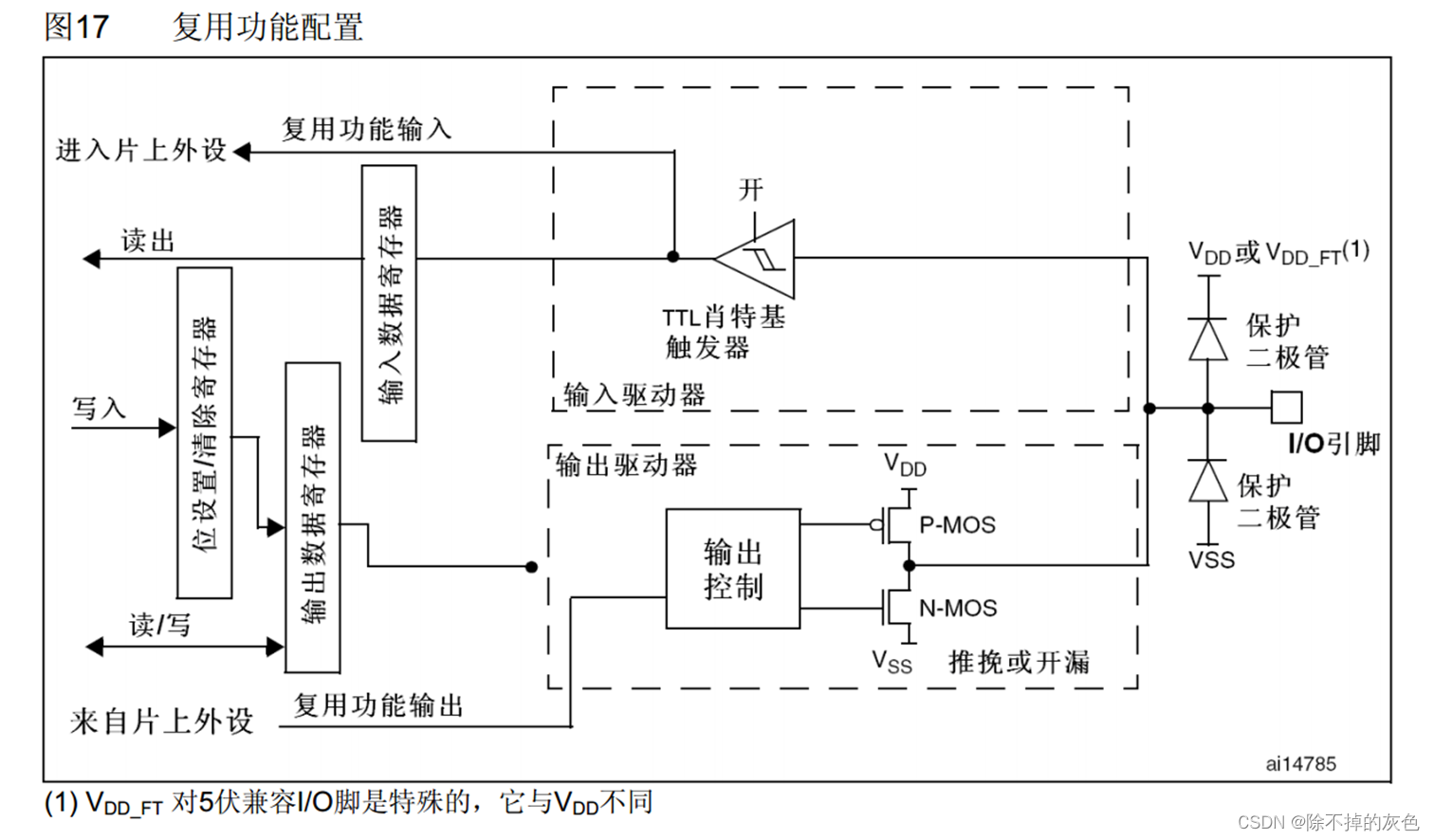
嵌入式开发笔记:STM32的外设GPIO知识学习
GPIO简介: • GPIO ( General Purpose Input Output )通用输入输出口 • 可配置为 8 种输入输出模式 • 引脚电平: 0V~3.3V ,部分引脚可容忍 5V (如舵机和驱动直流电机) • 输出模式下可控制端口…...

单片机论文参考:2、基于单片机的病床呼叫系统设计
任务要求 设计病床呼叫系统,使用3X8矩阵开关分别模拟医院病房与病床位数,当某开关按下时,系统显示呼叫的病房与病床、呼叫的时间。处理完毕可清除该呼叫显示记录。同时有数个病床呼叫时,可以循环呼叫记录显示。 摘要 病房呼叫系统…...
【C语言】结构体实现位段!位段有何作用?
本篇文章目录 1. 声明位段2. 位段的内存分配3. 位段的跨平台问题4.位段的应用5. 如何解决位段的跨平台问题? 1. 声明位段 位段的声明和结构是类似的,有两个不同: 位段的成员必须是 int、unsigned int 或 char。位段的成员名后边有一个冒号和…...

msvcp140为什么会丢失?msvcp140.dll丢失的解决方法
msvcp140.dll 是一个动态链接库文件,它包含了 C 运行时库的一些函数和类,例如全局对象、异常处理、内存管理、文件操作等。它是 Visual Studio 2015 及以上版本中的一部分,用于支持 C 应用程序的运行。如果 msvcp140.dll 丢失或损坏ÿ…...

Ingress Controller
什么是 Ingress Controller ? 在云原生生态中,通常来讲,入口控制器( Ingress Controller )是 Kubernetes 中的一个关键组件,用于管理入口资源对象。 Ingress 资源对象用于定义来自外网的 HTTP 和 HTTPS 规则,以控制进…...

离线安装 K3S
一、前言 简要记录一下离线环境下 K3S 的搭建,版本为 v1.23.17k3s1,使用外部数据库 MySQL 作元数据存储,禁用默认组件(coredns、servicelb、traefik、local-storage、metrics-server)并使用 Helm 单独安装(…...

Error系列-常见异常问题解决方案以及系统指令总结
前情提要 作为一名开发,日常工作中会遇到很多报错的情况,希望我的总结可以帮助到小伙伴们~日常工作中也会遇到需要部署项目或者登陆linux系统操作的情况,很多时候需要查找一些命令,于是我决定,要把我日常经常用到的一…...

c 各种例子
1. struct{ int code; float cost; }item,*ptrst; ptrst&item; prtst->code3451 // ptrst->codeitem.code(*ptrst).code 结构与union 的运算符相同,不同的是union 在同一时间内只能存储成员中的一种,其他的成员不真实。 2. c的修饰符声…...
Flowable主要子流程介绍
1. 内嵌子流程 (1)说明 内嵌子流程又叫嵌入式子流程,它是一个可以包含其它活动、分支、事件,等的活动。我们通常意义上说的子流程通常就是指的内嵌子流程,它表现为将一个流程(子流程)定…...

通过插件去除Kotlin混淆去除 @Metadata标记
在Kotlin中,Metadata是指描述Kotlin类的元数据。它包含了关于类的属性、函数、注解和其他信息的描述。Metadata的作用主要有以下几个方面: 反射:Metadata可以用于在运行时获取类的信息,包括类的名称、属性、函数等。通过反射&…...

F3D动画播放教程:如何轻松展示和播放3D模型动画
F3D动画播放教程:如何轻松展示和播放3D模型动画 【免费下载链接】f3d Fast and minimalist 3D viewer. 项目地址: https://gitcode.com/GitHub_Trending/f3/f3d 想要快速查看和播放3D模型动画吗?F3D(Fast and minimalist 3D viewer&am…...

算法 POJ1029
一.题目大意假币描述“金条”银行从可靠来源收到的信息,在他们最后一组的 N 枚硬币中,恰好有一枚硬币是假的,并且重量与其他硬币不同(而所有其他硬币的重量都相同)。经济危机之后,他们只有一个简…...

Super Qwen Voice World效果惊艳:‘金币数量’HUD实时反映生成计数
Super Qwen Voice World效果惊艳:‘金币数量’HUD实时反映生成计数 "Its-a me, Qwen!" 欢迎来到基于 Qwen3-TTS 构建的复古像素风语气设计中心。在这里,配音不再是枯燥的参数调节,而是一场 8-bit 的声音冒险! 1. 视觉盛…...

QRazyBox:5分钟解决二维码修复难题的专业工具
QRazyBox:5分钟解决二维码修复难题的专业工具 【免费下载链接】qrazybox QR Code Analysis and Recovery Toolkit 项目地址: https://gitcode.com/gh_mirrors/qr/qrazybox 二维码已经成为现代生活中无处不在的数字桥梁,但你是否遇到过这样的情况&…...

突破语言边界:XUnity.AutoTranslator全场景应用指南
突破语言边界:XUnity.AutoTranslator全场景应用指南 【免费下载链接】XUnity.AutoTranslator 项目地址: https://gitcode.com/gh_mirrors/xu/XUnity.AutoTranslator 当你打开一款期待已久的外文游戏,却被满屏陌生文字阻挡了探索的脚步࿱…...

提升开发效率:用快马一键生成快速排序多版本性能对比工具
今天在优化一个数据处理模块时,遇到了需要选择合适排序算法的问题。不同数据特征下,快速排序的各种变体表现差异很大,手动测试效率实在太低。于是我用InsCode(快马)平台快速搭建了一个性能对比工具,整个过程比想象中简单很多。 需…...
)
别再只仿真了!手把手教你用LabVIEW+USRP-2920搭建真实无线通信链路(BPSK/QPSK调制实战)
从仿真到实战:LabVIEW与USRP-2920构建无线通信链路的完整指南 在通信工程领域,仿真与硬件实现之间往往存在一道难以逾越的鸿沟。许多工程师能够熟练使用MATLAB或LabVIEW进行通信系统仿真,但当面对USRP-2920这样的射频硬件时,却常常…...

别再混淆了!FFmpeg提取AAC/H264流时常见的3个容器格式误区
别再混淆了!FFmpeg提取AAC/H264流时常见的3个容器格式误区 第一次用FFmpeg提取音频时,我把.m4a文件直接重命名为.aac,结果播放器报错——这个看似简单的操作背后,隐藏着容器格式与编码格式的深层差异。本文将用真实踩坑案例&#…...

消防给水系统控制:西门子 S7 - 200 与昆仑通态触摸屏的奇妙组合
消防给水系统控制,西门子S7-200,昆仑通态触摸屏YH25 1.采用西门子S7-200PLC,CPU226EM223数字量模块EM231模拟量模块。 2.昆仑通态MCGS触摸屏及软件,可自行转换新版MCGSPRO程序。 3.两水泵一用二备和二用一备可切换,故障…...

如何快速实现Blade框架国际化:多语言和本地化的完整指南
如何快速实现Blade框架国际化:多语言和本地化的完整指南 【免费下载链接】blade :rocket: Lightning fast and elegant mvc framework for Java8 项目地址: https://gitcode.com/gh_mirrors/bl/blade Blade是一款基于Java8的轻量级MVC框架,以其闪…...