【100天精通Python】Day69:Python可视化_实战:导航定位中预测轨迹和实际轨迹的3D动画,示例+代码
目录
1. 预测的3D轨迹和实际轨迹的动画图,同时动态更新
2 真值轨迹设置为静态的,预测轨迹不断更新
3 网格的三维坐标系有旋转运动,以此全方位展示预测轨迹和真值轨迹之间的空间关系
1. 预测的3D轨迹和实际轨迹的动画图,同时动态更新
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib.animation import FuncAnimation, PillowWriter# 假设您有两组连续平滑的姿势数据集,一组表示预测值,一组表示真值
# 每个数据点包含姿势信息 [x, y, z, roll, pitch, yaw]
# 这里使用一些示例数据,您需要替换为您的实际数据
num_poses = 200 # 增加轨迹点数
t = np.linspace(0, 20, num_poses) # 时间点,使轨迹变得更长
# 生成示例数据来表示预测值轨迹
x_pred = np.sin(t)
y_pred = np.cos(t)
z_pred = np.linspace(0, 10, num_poses)
# 生成示例数据来表示真值轨迹
x_true = np.sin(t) + 0.5 # 真值轨迹稍微偏移
y_true = np.cos(t) + 0.5
z_true = np.linspace(0, 10, num_poses)# 创建一个 3D 图形
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')# 创建空的轨迹线,一个红色表示预测值,一个蓝色表示真值
line_pred, = ax.plot([], [], [], marker='o', linestyle='-', markersize=4, color='red', label='Predicted Trajectory')
line_true, = ax.plot([], [], [], marker='o', linestyle='-', markersize=4, color='green', label='True Trajectory')# 设置图形标题和轴标签
ax.set_title('Pose Trajectories (Predicted vs. True)')
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')# 添加图例
ax.legend(loc='upper right')# 初始化函数,用于绘制空轨迹线
def init():line_pred.set_data([], [])line_pred.set_3d_properties([])line_true.set_data([], [])line_true.set_3d_properties([])return line_pred, line_true# 更新函数,用于更新轨迹线的数据
def update(frame):line_pred.set_data(x_pred[:frame], y_pred[:frame])line_pred.set_3d_properties(z_pred[:frame])line_true.set_data(x_true[:frame], y_true[:frame])line_true.set_3d_properties(z_true[:frame])# 扩大坐标范围,以包围轨迹ax.set_xlim(min(x_true) - 1, max(x_true) + 1)ax.set_ylim(min(y_true) - 1, max(y_true) + 1)ax.set_zlim(min(z_true) - 1, max(z_true) + 1)return line_pred, line_true# 创建动画对象
ani = FuncAnimation(fig, update, frames=num_poses, init_func=init, blit=True)# 创建一个文件名为animation.gif的视频文件,使用PillowWriter
ani.save('animation_gt.gif', writer=PillowWriter(fps=30))# 显示动画
plt.show()

2 真值轨迹设置为静态的,预测轨迹不断更新
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib.animation import FuncAnimation, PillowWriter# 假设您有两组连续平滑的姿势数据集,一组表示预测值,一组表示真值
# 每个数据点包含姿势信息 [x, y, z, roll, pitch, yaw]
# 这里使用一些示例数据,您需要替换为您的实际数据
num_poses = 200 # 增加轨迹点数
t = np.linspace(0, 20, num_poses) # 时间点,使轨迹变得更长
# 生成示例数据来表示预测值轨迹
x_pred = np.sin(t)
y_pred = np.cos(t)
z_pred = np.linspace(0, 10, num_poses)
# 生成示例数据来表示真值轨迹
x_true = np.sin(t) + np.random.uniform(-0.2, 0.3) # 真值轨迹稍微偏移
y_true = np.sin(t) + np.random.uniform(-0.2, 0.3) # 真值轨迹稍微偏移
z_true = np.linspace(0, 10, num_poses)# 创建一个 3D 图形
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')# 创建空的轨迹线,一个红色表示预测值,一个绿色表示真值
line_pred, = ax.plot([], [], [], marker='o', linestyle='-', markersize=4, color='red', label='Predicted Trajectory')
line_true, = ax.plot(x_true, y_true, z_true, marker='o', linestyle='-', markersize=4, color='green', label='True Trajectory')# 设置图形标题和轴标签
ax.set_title('Pose Trajectories (Predicted vs. True)')
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')# 添加图例
ax.legend(loc='upper right')# 设置轨迹显示范围
ax.set_xlim(-2, 2) # X轴范围
ax.set_ylim(-2, 2) # Y轴范围
ax.set_zlim(0, 12) # Z轴范围# 初始化函数,用于绘制空轨迹线
def init():line_pred.set_data([], [])line_pred.set_3d_properties([])return line_pred, line_true# 更新函数,用于更新预测轨迹的数据
def update(frame):line_pred.set_data(x_pred[:frame], y_pred[:frame])line_pred.set_3d_properties(z_pred[:frame])return line_pred, line_true# 创建动画对象
ani = FuncAnimation(fig, update, frames=num_poses, init_func=init, blit=True)# 创建一个文件名为animation.gif的视频文件,使用PillowWriter
ani.save('animation_1.gif', writer=PillowWriter(fps=30))# 显示动画
plt.show()
3 网格的三维坐标系有旋转运动,以此全方位展示预测轨迹和真值轨迹之间的空间关系
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib.animation import FuncAnimation, PillowWriter# 假设您有两组连续平滑的姿势数据集,一组表示预测值,一组表示真值
# 每个数据点包含姿势信息 [x, y, z, roll, pitch, yaw]
# 这里使用一些示例数据,您需要替换为您的实际数据
num_poses = 200 # 增加轨迹点数
t = np.linspace(0, 20, num_poses) # 时间点,使轨迹变得更长
# 生成示例数据来表示预测值轨迹
x_pred = np.sin(t)
y_pred = np.cos(t)
z_pred = np.linspace(0, 10, num_poses)
# 生成示例数据来表示真值轨迹
x_true = np.sin(t) + 0.5 # 真值轨迹稍微偏移
y_true = np.cos(t) + 0.5
z_true = np.linspace(0, 10, num_poses)# 创建一个 3D 图形
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')# 创建空的轨迹线,一个红色表示预测值,一个蓝色表示真值
line_pred, = ax.plot([], [], [], marker='o', linestyle='-', markersize=4, color='red', label='Predicted Trajectory')
line_true, = ax.plot(x_true, y_true, z_true, marker='o', linestyle='-', markersize=4, color='blue', label='True Trajectory')# 设置图形标题和轴标签
ax.set_title('Pose Trajectories (Predicted vs. True)')
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')# 添加图例
ax.legend(loc='upper right')# 设置轨迹显示范围
ax.set_xlim(-2, 2) # X轴范围
ax.set_ylim(-2, 2) # Y轴范围
ax.set_zlim(0, 12) # Z轴范围# 初始化函数,用于绘制空轨迹线
def init():line_pred.set_data([], [])line_pred.set_3d_properties([])return line_pred, line_true# 更新函数,用于更新预测轨迹的数据和整体的旋转运动
def update(frame):line_pred.set_data(x_pred[:frame], y_pred[:frame])line_pred.set_3d_properties(z_pred[:frame])# 添加整体的旋转运动ax.view_init(elev=20, azim=frame) # 调整视角,azim控制旋转return line_pred, line_true# 创建动画对象
ani = FuncAnimation(fig, update, frames=num_poses, init_func=init, blit=True)# 创建一个文件名为animation.gif的视频文件,使用PillowWriter
ani.save('animation.gif', writer=PillowWriter(fps=30))# 显示动画
plt.show()

更新函数中使用了
ax.view_init来控制整体的旋转运动,elev参数用于调整仰角,azim参数用于控制旋转。您可以根据需要调整elev和azim的值来实现所需的旋转效果。
相关文章:
【100天精通Python】Day69:Python可视化_实战:导航定位中预测轨迹和实际轨迹的3D动画,示例+代码
目录 1. 预测的3D轨迹和实际轨迹的动画图,同时动态更新 2 真值轨迹设置为静态的,预测轨迹不断更新 3 网格的三维坐标系有旋转运动,以此全方位展示预测轨迹和真值轨迹之间的空间关系 1. 预测的3D轨迹和实际轨迹的动画图,同时动态更…...

MySQL中对varchar类型的列进行统计分析
需求1:如何在MYSQL中查找my_data列中所有<5%的数量,my_data为varchar类型 如果my_data列是varchar类型并存储为上面显示的格式(如"28.62%“),那么在查找所有小于或等于5%的值时,我们首先需要去掉末…...

mysql索引最左前缀法则、使用场景
提示:mysql索引最左前缀使用的规则,以及索引失效和部分字段索引失效 文章目录 索引使用法则最左前缀法则 索引执行explain分析遵守联合索引最左前缀法则(索引有效)未遵守联合索引最左前缀法则(索引失效或部分索引失效&…...
LeetCode75-06:移动零
移动零 初版(bug) func moveZeroes(nums []int) {if len(nums) 1{return}// 设置两个指针fp1,fp2分别指向第一个元素和第二个元素,// 两种情况// 假如指针fp1指向元素为零// 1) *fp2!0,则交换。// 2) *fp20,则fp2后移,直至*fp2!0,与fp1交换…...
C/C++统计满足条件的4位数个数 2023年5月电子学会青少年软件编程(C/C++)等级考试一级真题答案解析
目录 C/C统计满足条件的4位数个数 一、题目要求 1、编程实现 2、输入输出 二、解题思路 1、案例分析 三、程序代码 四、程序说明 五、运行结果 六、考点分析 C/C统计满足条件的4位数个数 2019年12月 C/C编程等级考试一级编程题 一、题目要求 1、编程实现 给定若干…...

python+nodejs+php+springboot+vue 校园安全车辆人员出入安全管理系统
本校园安全管理系统共包含15个表:分别是表现评分信息表,车辆登记信息表,配置文件信息表,家校互动信息表,监控系统信息表,教师信息表,留言板信息表,校园资讯信息表,人员登记信息表&am…...

针对discuz3.2的渗透测试
漏洞原理描述 https://zhuanlan.zhihu.com/p/51907363 想要利用这个漏洞得知道key的前缀,首先在注册的地方抓包 GET /member.php?modregister HTTP/1.1 Host: 103.108.67.223:8822 User-Agent: Mozilla/5.0 (Windows NT 10.0; Win64; x64; rv:109.0) Gecko/2010010…...

python的中秋之美
标题:Python的中秋之美:用代码感受传统佳节的魅力 引言: 中秋节,是中国传统的佳节之一,也是家人团聚、共度美好时光的时刻。作为一名Python程序员,我想通过编写代码来感受中秋节的美丽与独特。在这篇博客中…...
ClickHouse与Elasticsearch比较总结
目录 背景 分布式架构 存储架构 写入链路设计 Elasticsearch 再谈Schemaless 查询架构 计算引擎 数据扫描 再谈高并发 性能测试 日志分析场景 access_log(数据量197921836) trace_log(数据量569816761) 官方Ontime测…...
-NOA领航辅助系统-合众)
辅助驾驶功能开发-功能对标篇(12)-NOA领航辅助系统-合众
1.横向对标参数 厂商和众车型哪吒S上市时间2022方案11V5R3L+1DMS摄像头前视摄像头2*(8M)侧视摄像头4后视摄像头1环视摄像头4DMS摄像头1雷达毫米波雷达54D毫米波雷达/超声波雷达12激光雷达2*(华为96线,905nm)域控供应商1*(华为MDC610)辅助驾驶软件供应商自研TA PILOT高精度地图…...

Vue项目中使用element-plus的el-table组件-组件使用-样式修改
项目配置 <div class"table-wrap"><el-tableclass"table-card-container":data"tableData"style"width: 100%"><template v-for"column in tableColumn"><el-table-columnv-if"column.isShow&qu…...
)
JavaBean字符串训练(支票大写)
package 字符串练习;import java.util.Scanner;public class 人名币训练 {public static void main(String[] args) {/* 需求: 用户输入一个数字,改成发票那样的展示出来例子: 4321 -> 零佰零拾零万肆千叁佰贰拾壹元共七位(固定)*///思路: 1. 把用户读入的数字改写成大写,并…...

Java 核心技术卷 I —— 第2章 Java 编程环境
文章目录 2.1 安装 Java 开发工具包(*)2.2 使用命令行工具2.3 使用集成开发环境(*)2.4 JShell 2.1 安装 Java 开发工具包(*) 2.2 使用命令行工具 打开终端窗口,进入 Java 的 bin 目录&…...
外汇天眼:英国FCA引入新规定,强化金融广告审核标准!
英国金融行为监管局(FCA)为帮助人们做出明智的储蓄、投资和借贷决策,将引入新的筛选检查措施,针对那些批准金融广告的公司。 批准非受监管公司的金融营销的公司必须证明他们具备批准广告所需的技能和专业知识。那些签署广告批准的…...
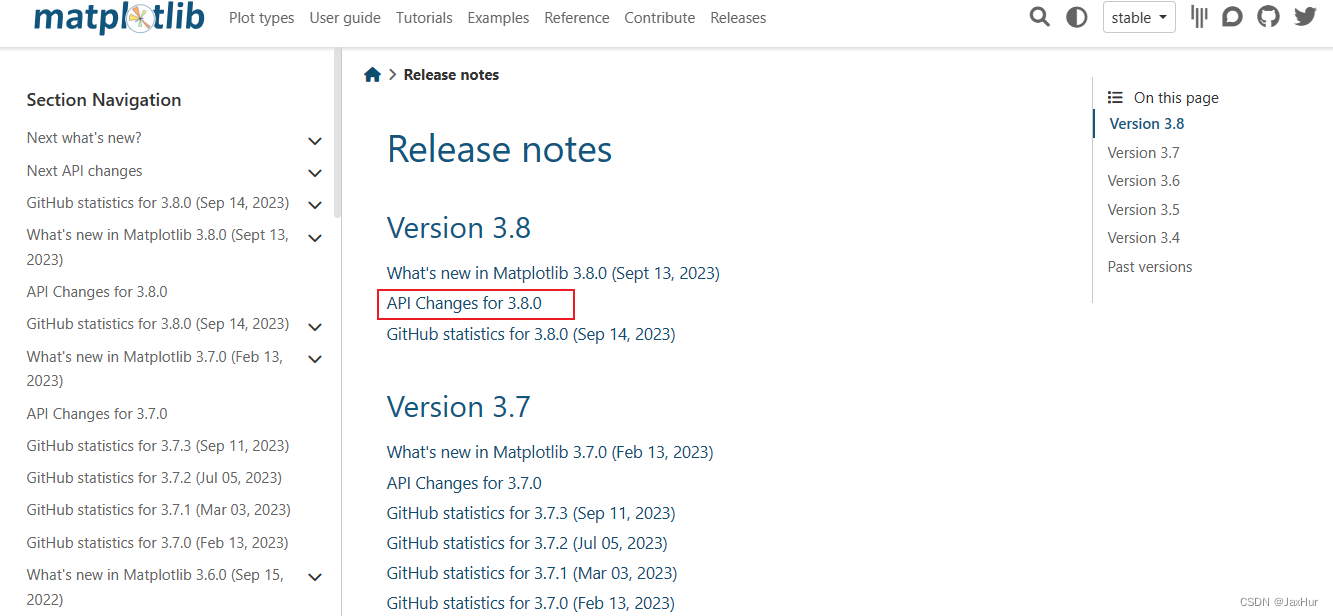
【python】Seaborn画热力图,只显示第一行数字---seaborn与matplotlib版本问题
github上有这个讨论:Heatmap only has annotation text in the top row only Issue #3478 mwaskom/seaborn (github.com)翻译过来就是:热图仅在最上面一行有注释文本; 原因就是matplotlib 在2023年9月更新到了 3.8.0版本,改变了…...

VMware CentOS7 Docker入门
一、安装centos 1.引导安装 创建新的虚拟机-> 典型安装-> 安装程序光盘映像-> 命名虚拟机(centos7.9,位置存放F:\Virtual Machines\CentOS 7.9)-> 20GB,将虚拟磁盘存储为单个文件-> 自定义硬件4gb 4核-> NAT-> 2.启动安装 安装位置…...
C++ Primer 第5章 语句
C Primer 第5章 语句 5.1 简单语句一、空语句二、别漏写分号,也别多写分号三、复合语句(块) 5.2 语句作用域5.3 条件语句5.3.1 if语句一、使用if else语句二、嵌套if语句三、注意使用花括号四、悬垂else五、使用花括号控制执行路径 5.3.2 swi…...

【C++】bitset位图的简单模拟实现及常见面试题
文章目录 前言一、 bitset模拟实现二、 常见面试题1.给你一百亿个整数,找到只出现一次的数字2. 给两个文件,分别有100亿个整数,我们只有1G内存,如何找到两个文件交集? 前言 快速查找某个数据是否在一个集合中排序 去重…...
十六、MySql的MVCC机制CONNECT(收官!)
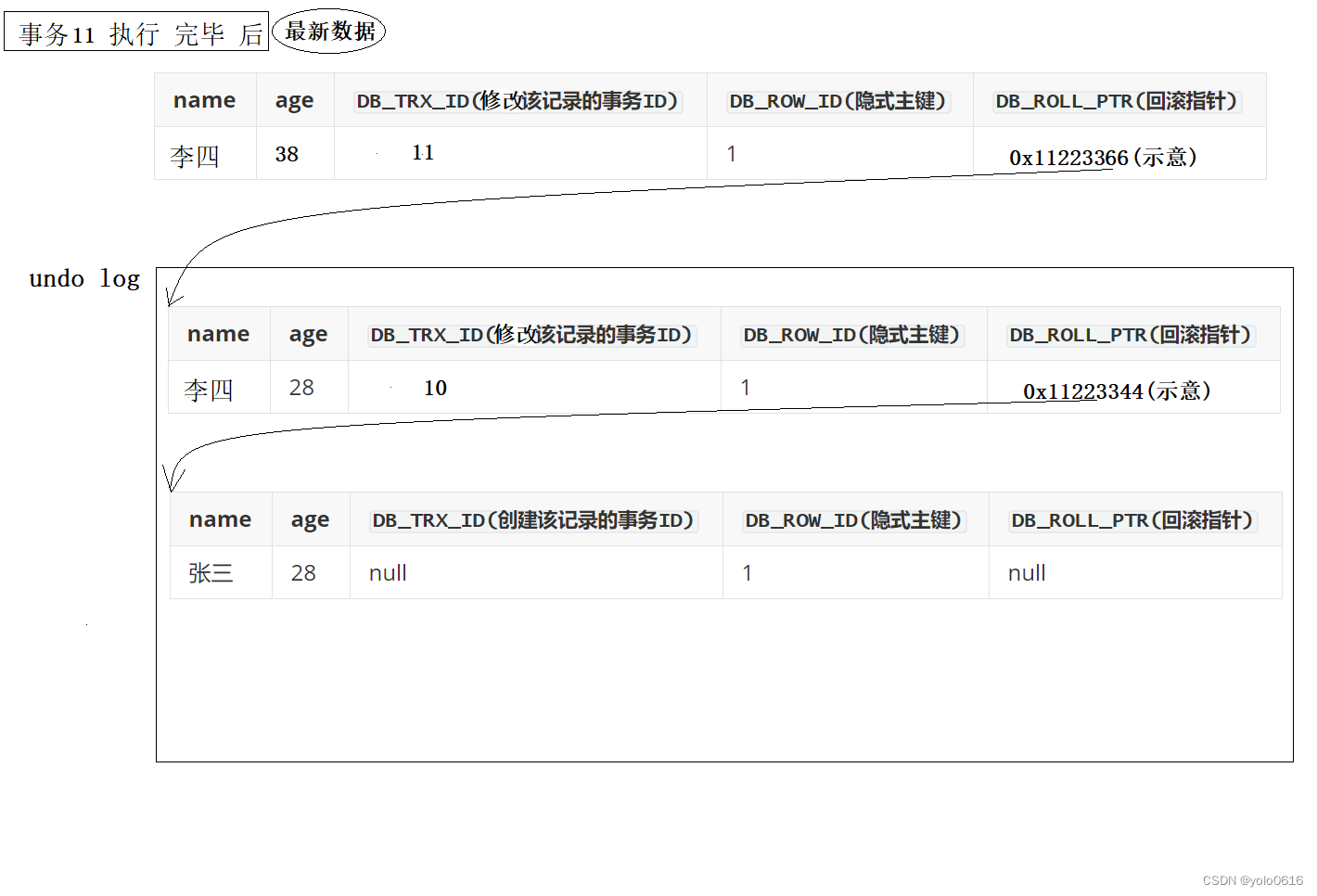
文章目录 一、数据库并发的场景有三种:二、读-写(一)3个记录隐藏列字段(二)undo 日志(三)模拟 MVCC(四)一些思考(五)Read View 一、数据库并发的场…...
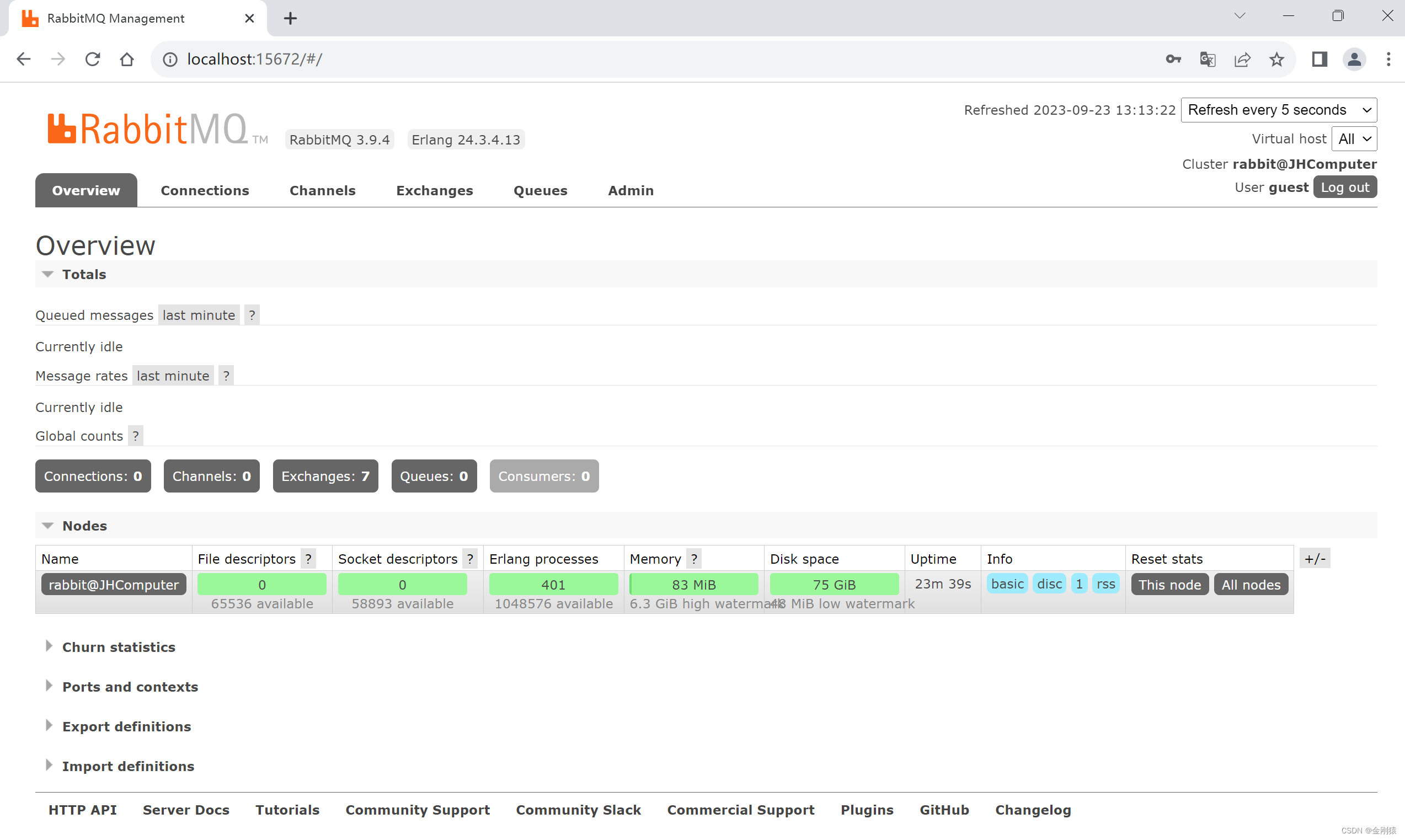
194、SpringBoot -- 下载和安装 Erlang 、 RabbitMQ
本节要点: 一些命令: 小黑窗输入: rabbitmq-plugins enable rabbitmq_management 启动控制台插件 rabbitmq-server 启动rabbitMQ服务器 管理员启动小黑窗: rabbitmq-service install 添加rabbitMQ为本地服务 启动浏览器访问 ht…...

Delphi经典8大天坑|第六篇:方法参数缺省值写在实现区,导致缺省值不生效
一、现象描述给方法(过程/函数)定义参数缺省值(默认值)后,调用方法时不传递该参数,期望使用缺省值,但实际运行时,缺省值不生效,参数呈现随机值或错误值,排查时…...
,再拆分流水线(plan / exec-plan / build))
【Scratch×AI 系列 05】工程化实战:先统一目录(init),再拆分流水线(plan / exec-plan / build)
摘要 Scratch 项目最容易“做着做着就乱”:素材散落、版本混杂、产物找不到,AI 更是无从下手xw-scratch-init 不是“创建文件夹”,而是把协作与自动化的前提一次性铺好把流程拆成 plan → exec-plan → build,是为了把 AI 从“胡写…...

如何高效部署Label Studio数据标注工具:专业配置实战指南
如何高效部署Label Studio数据标注工具:专业配置实战指南 【免费下载链接】label-studio Label Studio is a multi-type data labeling and annotation tool with standardized output format 项目地址: https://gitcode.com/GitHub_Trending/la/label-studio …...

Ryujinx:用C重构Switch游戏生态的技术探索之旅
Ryujinx:用C#重构Switch游戏生态的技术探索之旅 【免费下载链接】Ryujinx 用 C# 编写的实验性 Nintendo Switch 模拟器 项目地址: https://gitcode.com/GitHub_Trending/ry/Ryujinx 当游戏主机硬件迭代加速,玩家渴望在更强大平台体验经典游戏时&a…...

魔兽争霸III现代兼容性终极指南:用Warcraft Helper重获完美体验
魔兽争霸III现代兼容性终极指南:用Warcraft Helper重获完美体验 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸III在现代电…...
)
12. 本地算力不足?云服务器选型指南(高性价比+适配大模型)
001、算力困境:为什么我们需要云服务器? 从一次深夜调试说起 上周三凌晨两点,我的本地工作站风扇开始狂转——16核CPU占用率97%,64GB内存基本吃满,两块3090显卡的显存指示灯红得发烫。屏幕上正在跑一个7B参数的模型微调任务,进度条卡在23%已经半小时没动过。终端里突然…...

百度网盘直链解析开源工具完全指南:从入门到精通
百度网盘直链解析开源工具完全指南:从入门到精通 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 你是否曾经历过这样的困扰:明明网络带宽充足ÿ…...

Nunchaku FLUX.1-dev 开发环境配置:Anaconda虚拟环境创建与管理指南
Nunchaku FLUX.1-dev 开发环境配置:Anaconda虚拟环境创建与管理指南 想玩转Nunchaku FLUX.1-dev这类前沿的AI模型,第一步也是最关键的一步,就是把它的“家”给搭好。这个“家”就是Python虚拟环境。你可能听过不少因为环境依赖冲突ÿ…...

PyTorch 2.8镜像新手入门:无需配置,直接开启你的AI项目实战
PyTorch 2.8镜像新手入门:无需配置,直接开启你的AI项目实战 1. 为什么选择PyTorch 2.8预置镜像? 深度学习项目最让人头疼的往往不是算法本身,而是环境配置。不同版本的PyTorch、CUDA、cuDNN之间的兼容性问题,足以让一…...

OmniVoice:支持600+语言的AI语音合成新突破
OmniVoice:支持600语言的AI语音合成新突破 【免费下载链接】OmniVoice 项目地址: https://ai.gitcode.com/hf_mirrors/k2-fsa/OmniVoice 导语:OmniVoice——一款突破性的多语言文本转语音(TTS)模型正式亮相,其…...