十五、红外遥控器
十五、红外遥控器
- 介绍
- 基本接收和发送
- 遥控器键码
- 外部中断和外部中断寄存器
- 红外解码
- 中断函数
- 红外遥控
- 电机模块
- 电机调速
介绍
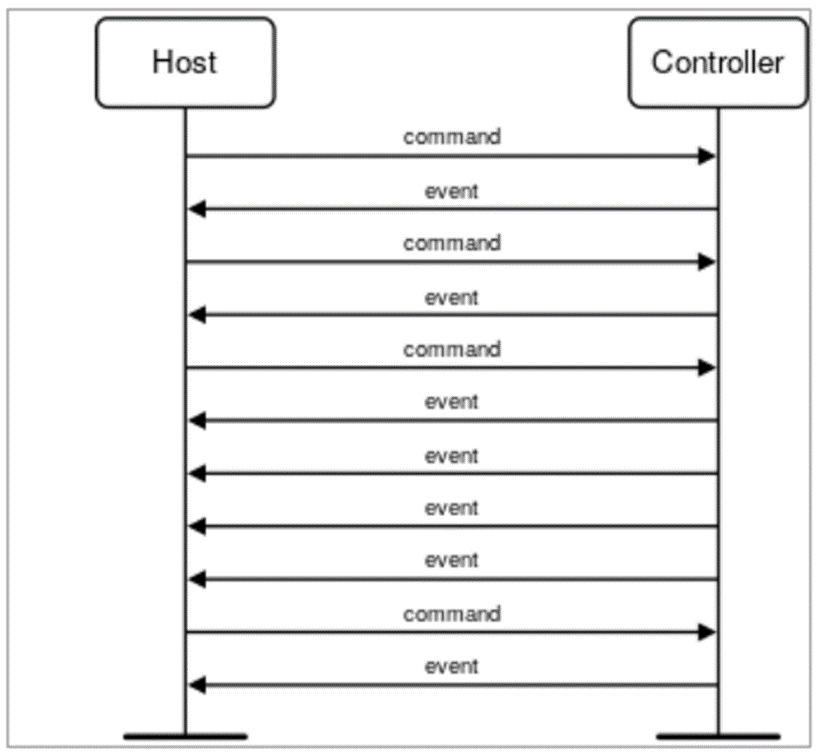
基本接收和发送
- 空闲状态:红外LED不亮,接收头输出高电平
- 发送低电平:红外LED以38KHz闪烁,接收头输出低电平
- 发送高电平:红外LED不亮,接收头输出高电平
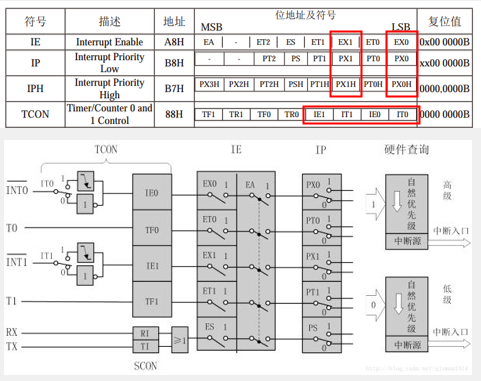
遥控器键码

外部中断和外部中断寄存器
低电平或者下降沿触发
红外解码
#include <REGX52.H>
#include "Timer0.h"
#include "Int0.h"unsigned int IR_Time;
unsigned char IR_State;unsigned char IR_Data[4];
unsigned char IR_pData;unsigned char IR_DataFlag;
unsigned char IR_RepeatFlag;
unsigned char IR_Address;
unsigned char IR_Command;/*** @brief 红外遥控初始化* @param 无* @retval 无*/
void IR_Init(void)
{Timer0_Init();Int0_Init();
}/*** @brief 红外遥控获取收到数据帧标志位* @param 无* @retval 是否收到数据帧,1为收到,0为未收到*/
unsigned char IR_GetDataFlag(void)
{if(IR_DataFlag){IR_DataFlag=0;return 1;}return 0;
}/*** @brief 红外遥控获取收到连发帧标志位* @param 无* @retval 是否收到连发帧,1为收到,0为未收到*/
unsigned char IR_GetRepeatFlag(void)
{if(IR_RepeatFlag){IR_RepeatFlag=0;return 1;}return 0;
}/*** @brief 红外遥控获取收到的地址数据* @param 无* @retval 收到的地址数据*/
unsigned char IR_GetAddress(void)
{return IR_Address;
}/*** @brief 红外遥控获取收到的命令数据* @param 无* @retval 收到的命令数据*/
unsigned char IR_GetCommand(void)
{return IR_Command;
}//外部中断0中断函数,下降沿触发执行
void Int0_Routine(void) interrupt 0
{if(IR_State==0) //状态0,空闲状态{Timer0_SetCounter(0); //定时计数器清0Timer0_Run(1); //定时器启动IR_State=1; //置状态为1}else if(IR_State==1) //状态1,等待Start信号或Repeat信号{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为13.5ms,则接收到了Start信号(判定值在12MHz晶振下为13500,在11.0592MHz晶振下为12442)if(IR_Time>13500-500 && IR_Time<13500+500){IR_State=2; //置状态为2}//如果计时为11.25ms,则接收到了Repeat信号(判定值在12MHz晶振下为11250,在11.0592MHz晶振下为10368)else if(IR_Time>11250-500 && IR_Time<11250+500){IR_RepeatFlag=1; //置收到连发帧标志位为1Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}else //接收出错{IR_State=1; //置状态为1}}else if(IR_State==2) //状态2,接收数据{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为1120us,则接收到了数据0(判定值在12MHz晶振下为1120,在11.0592MHz晶振下为1032)if(IR_Time>1120-500 && IR_Time<1120+500){IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8)); //数据对应位清0IR_pData++; //数据位置指针自增}//如果计时为2250us,则接收到了数据1(判定值在12MHz晶振下为2250,在11.0592MHz晶振下为2074)else if(IR_Time>2250-500 && IR_Time<2250+500){IR_Data[IR_pData/8]|=(0x01<<(IR_pData%8)); //数据对应位置1IR_pData++; //数据位置指针自增}else //接收出错{IR_pData=0; //数据位置指针清0IR_State=1; //置状态为1}if(IR_pData>=32) //如果接收到了32位数据{IR_pData=0; //数据位置指针清0if((IR_Data[0]==~IR_Data[1]) && (IR_Data[2]==~IR_Data[3])) //数据验证{IR_Address=IR_Data[0]; //转存数据IR_Command=IR_Data[2];IR_DataFlag=1; //置收到连发帧标志位为1}Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}}
}中断函数
void Int0_Init(void)
{IT0=1;IE0=0;EX0=1;EA=1;PX0=1;
}
红外遥控
#include <REGX52.H>
#include "Delay.h"
#include "LCD1602.h"
#include "IR.h"unsigned char Num;
unsigned char Address;
unsigned char Command;void main()
{LCD_Init();LCD_ShowString(1,1,"ADDR CMD NUM");LCD_ShowString(2,1,"00 00 000");IR_Init();while(1){if(IR_GetDataFlag() || IR_GetRepeatFlag()) //如果收到数据帧或者收到连发帧{Address=IR_GetAddress(); //获取遥控器地址码Command=IR_GetCommand(); //获取遥控器命令码LCD_ShowHexNum(2,1,Address,2); //显示遥控器地址码LCD_ShowHexNum(2,7,Command,2); //显示遥控器命令码if(Command==IR_VOL_MINUS) //如果遥控器VOL-按键按下{Num--; //Num自减}if(Command==IR_VOL_ADD) //如果遥控器VOL+按键按下{Num++; //Num自增}LCD_ShowNum(2,12,Num,3); //显示Num}}
}
电机模块
#include <REGX52.H>
#include "Timer1.h"//引脚定义
sbit Motor=P1^0;unsigned char Counter,Compare;/*** @brief 电机初始化* @param 无* @retval 无*/
void Motor_Init(void)
{Timer1_Init();
}/*** @brief 电机设置速度* @param Speed 要设置的速度,范围0~100* @retval 无*/
void Motor_SetSpeed(unsigned char Speed)
{Compare=Speed;
}//定时器1中断函数
void Timer1_Routine() interrupt 3
{TL1 = 0x9C; //设置定时初值TH1 = 0xFF; //设置定时初值Counter++;Counter%=100; //计数值变化范围限制在0~99if(Counter<Compare) //计数值小于比较值{Motor=1; //输出1}else //计数值大于比较值{Motor=0; //输出0}
}电机调速
#include <REGX52.H>
#include "Delay.h"
#include "Key.h"
#include "Nixie.h"
#include "Motor.h"
#include "IR.h"unsigned char Command,Speed;void main()
{Motor_Init();IR_Init();while(1){if(IR_GetDataFlag()) //如果收到数据帧{Command=IR_GetCommand(); //获取遥控器命令码if(Command==IR_0){Speed=0;} //根据遥控器命令码设置速度if(Command==IR_1){Speed=1;}if(Command==IR_2){Speed=2;}if(Command==IR_3){Speed=3;}if(Speed==0){Motor_SetSpeed(0);} //速度输出if(Speed==1){Motor_SetSpeed(50);}if(Speed==2){Motor_SetSpeed(75);}if(Speed==3){Motor_SetSpeed(100);}}Nixie(1,Speed); //数码管显示速度}
}相关文章:
十五、红外遥控器
十五、红外遥控器 介绍基本接收和发送遥控器键码外部中断和外部中断寄存器 红外解码中断函数红外遥控电机模块电机调速 介绍 基本接收和发送 空闲状态:红外LED不亮,接收头输出高电平发送低电平:红外LED以38KHz闪烁,接收头输出低…...

diot函数解析
文章目录 前言一、Rio_readinitb二、Rio_readlineb三、strstr四、strcat五、Open_clientfd六、Rio_writen总结 前言 备战CSAPP中的ProxyLab时解析书上的diot函数中遇到了一些不会的函数,遂解析记录。 一、Rio_readinitb 读和解析请求行 Rio_readinitb(&rio,…...

Python函数绘图与高等代数互融实例(一):正弦函数与余弦函数
Python函数绘图与高等代数互融实例(一):正弦函数与余弦函数 Python函数绘图与高等代数互融实例(二):闪点函数 Python函数绘图与高等代数互融实例(三):设置X|Y轴|网格线 Python函数绘图与高等代数互融实例(四):设置X|Y轴参考线|参考区域 Python函数绘图与高等代数互融实例(五…...
Python 判断回文数
"""判断输入的数是否为回文数介绍:回文数:数字从高位到低位正序排列和低位到高位逆序排列都是同一数值例如:数字 1221 无论正序还是逆序都是 1221知识点:1、获取字符串长度函数len()2、条件语句if/elif/else3、循环…...

人工智能在金融领域的五个应用案例
随着科技的进步,人工智能(Artificial Intelligence,AI)正逐渐渗透到各个行业中,其中包括金融领域。本文介绍人工智能在金融领域的五个应用案例,以期帮助大家更好地了解这个新兴技术在金融中的价值和作用。 文章目录 Part1 风险管理…...

java 工程管理系统源码+项目说明+功能描述+前后端分离 + 二次开发
Java版工程项目管理系统 Spring CloudSpring BootMybatisVueElementUI前后端分离 功能清单如下: 首页 工作台:待办工作、消息通知、预警信息,点击可进入相应的列表 项目进度图表:选择(总体或单个)项目显示…...
:构造/析构/赋值运算)
Effective C++看书笔记(2):构造/析构/赋值运算
构造/析构/赋值运算 5:了解C默默编写并调用哪些函数6:如果不想使用编译器自动生成的函数,就该明确拒绝7:为多态基类声明virtual析构函数8:别让异常逃离析构函数9:绝不在构造和析构过程中调用virtual函数10&…...
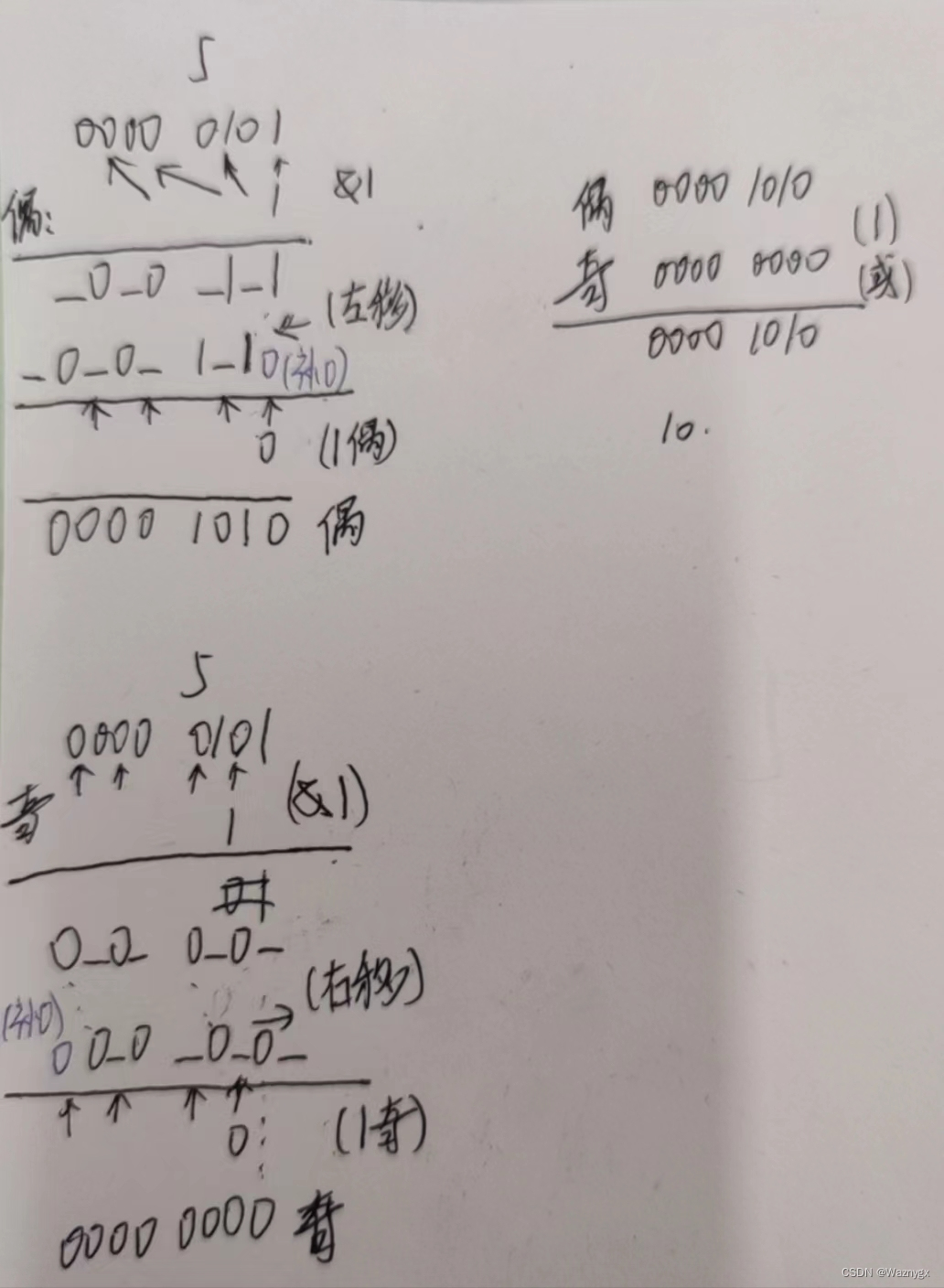
交换奇偶位:交换一个整数的二进制的奇偶位置(仅考虑正数情况)
方法二: 设计思想: 0xAAAAAAAA 的二进制表示为 10101010...(从最低位开始) 0x55555555 的二进制表示为 01010101...(从最低位开始) 问题:更加想不到掩码!!…...

Unity中的两种ScriptingBackend
一:前言 二:两种模式的介绍 ios:unity只有il2cpp模式的编译才支持64位系统,mono是不支持的,在快速开发阶段仍然支持Mono,但是不能再向Apple提交Mono(32位)的应用 苹果在2016年1月就要求所有新上架游戏必须支…...
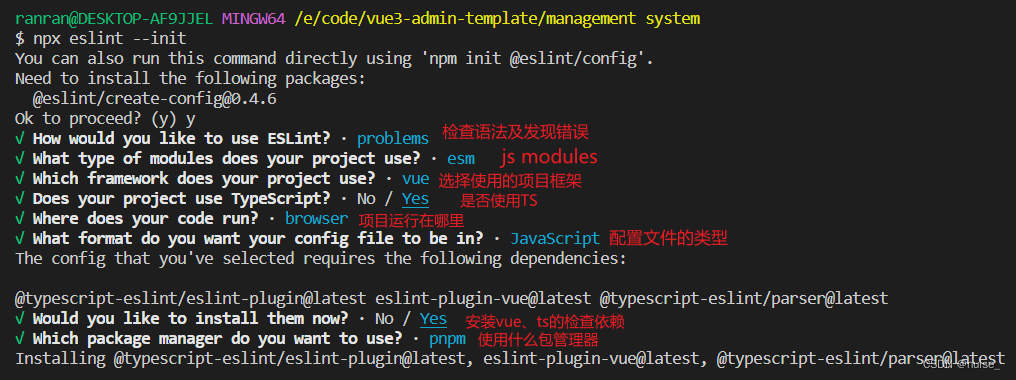
vue3硅谷甄选01 | 使用vite创建vue3项目及项目的配置 环境准备 ESLint配置 prettier配置 husky配置 项目集成
文章目录 使用vite创建vue3项目及项目的配置1.环境准备2.项目配置ESLint校验代码工具配置 - js代码检测工具1.安装ESLint到开发环境 devDependencies2.生成配置文件:.eslint.cjs**3.安装vue3环境代码校验插件**4. 修改.eslintrc.cjs配置文件5.生成ESLint忽略文件6.在package.js…...
蓝牙核心规范(V5.4)10.5-BLE 入门笔记之HCI
HCI全称:HOST Constroller Interface 主机控制器接口(HCI)定义了一个标准化的接口,通过该接口,主机可以向控制器发出命令,并且控制器可以与主机进行通信。规范被分成几个部分,第一部分仅从功能的角度定义接口,不考虑具体的实现机制,而其他部分定义了在使用四种可能的…...

【计算机毕业设计】基于SpringBoot+Vue记帐理财系统的设计与实现
博主主页:一季春秋博主简介:专注Java技术领域和毕业设计项目实战、Java、微信小程序、安卓等技术开发,远程调试部署、代码讲解、文档指导、ppt制作等技术指导。主要内容:毕业设计(Java项目、小程序、安卓等)、简历模板、学习资料、…...

2023年中国研究生数学建模竞赛E题
出血性脑卒中临床智能诊疗建模 一、背景介绍 出血性脑卒中指非外伤性脑实质内血管破裂引起的脑出血,占全部脑卒中发病率的10-15%。其病因复杂,通常因脑动脉瘤破裂、脑动脉异常等因素,导致血液从破裂的血管涌入脑组织,从而造成脑部…...
基于springboot+vue的大学生科创项目在线管理系统
博主主页:猫头鹰源码 博主简介:Java领域优质创作者、CSDN博客专家、公司架构师、全网粉丝5万、专注Java技术领域和毕业设计项目实战 主要内容:毕业设计(Javaweb项目|小程序等)、简历模板、学习资料、面试题库、技术咨询 文末联系获取 项目介绍…...

什么是文档签名证书?PDF文档怎么签名?
什么是文档签名证书?在“互联网”时代,电子合同、电子证照、电子病历、电子保单等各类电子文档无纸化应用成为常态。如何让电子文档的签署、审批具有公信力及法律效力,防止伪造签名、假冒签名等问题出现,是电子文档无纸化应用的主…...

2023年汉字小达人区级比赛倒计时2天,最新问题解答和真题练一练
今天是9月23日,距离2023年第十届汉字小达人区级比赛(初赛)的自由报名参赛时间还有2天,六分成长结合家长和小朋友们问的比较多的问题进行解答,并提供一些真题供大家练习、了解比赛题型和规则。 问题1:2023年…...
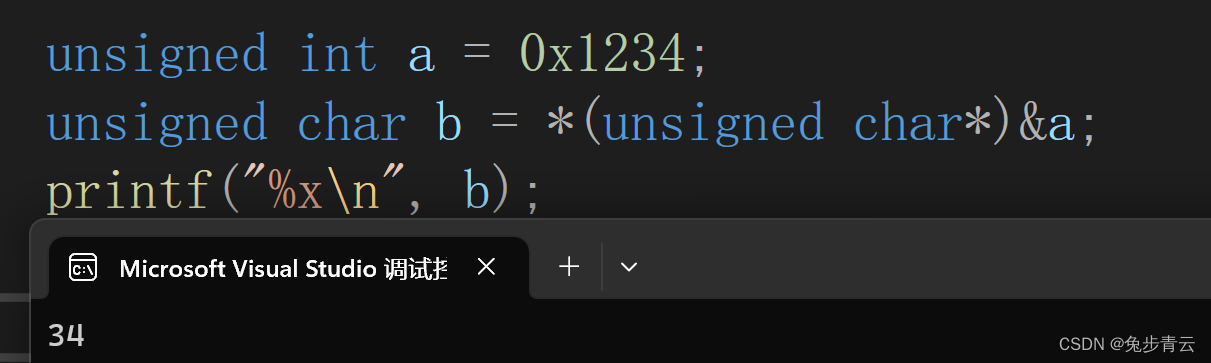
关于地址存放的例题
unsigned int a 0x1234; unsigned char b *(unsigned char*)&a; 上面代码大端存储和小端存储的值分别是多少? 大端存储的是把高位地址存放在低位地址处,低位存放到高位。小端是高位存放在高位,低位在低位。因为a是整型,所…...
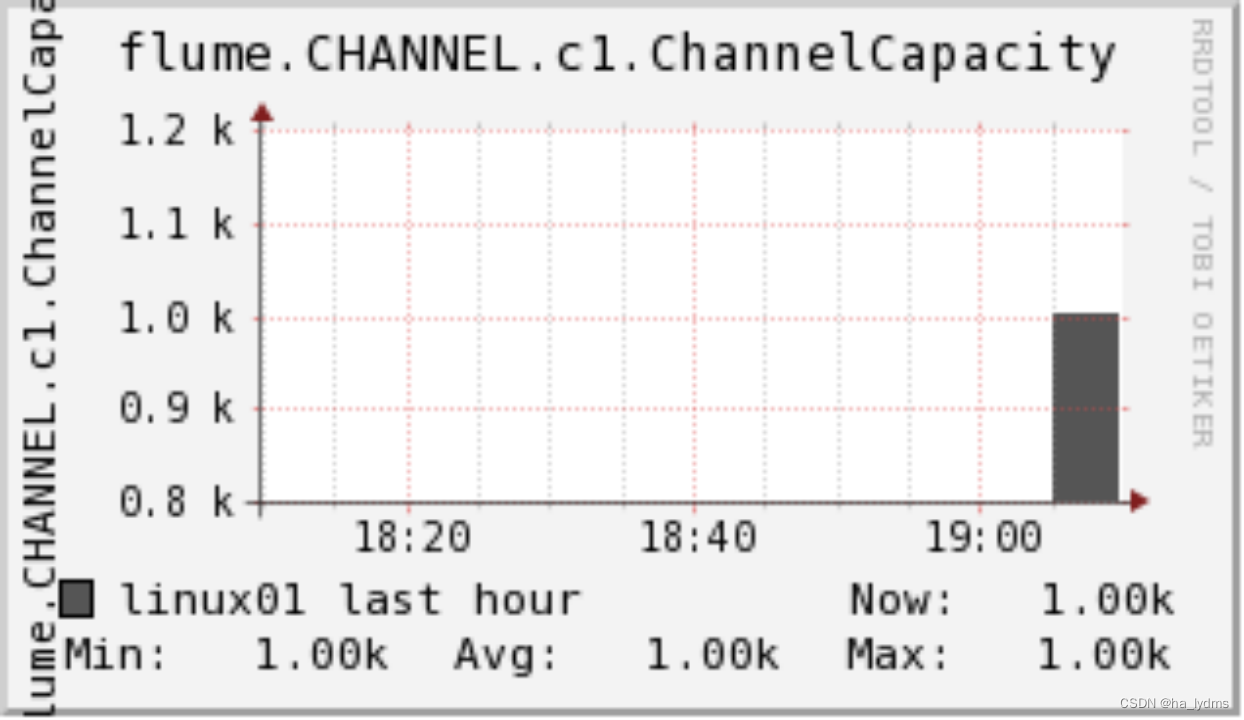
Flume最简单使用
文章目录 一、简介1、定义2、基础架构 二、快速入门1、解压Flume2、案例一:监控端口号3、案例二:将空目录下文件 三、Flume进阶1、Flume事务2、Flume Agent内部原理3、案例一:监控日志4、案例二:多路复用和拦截器适应4.1 原理4.2 …...

第2章 Java集合
2.1 谈谈你对Java集合的理解 难度:★★★ 重点:★★★★ 白话解析 集合类的概念还是比较重要的,不仅面试经常问,实际开发中也离不开。如果能把这道题真正理解了,集合可以说基本上没问题了。 集合就用来用存数据的,它提供了对数据增删改查和统计大小等方法。在Java中集合…...
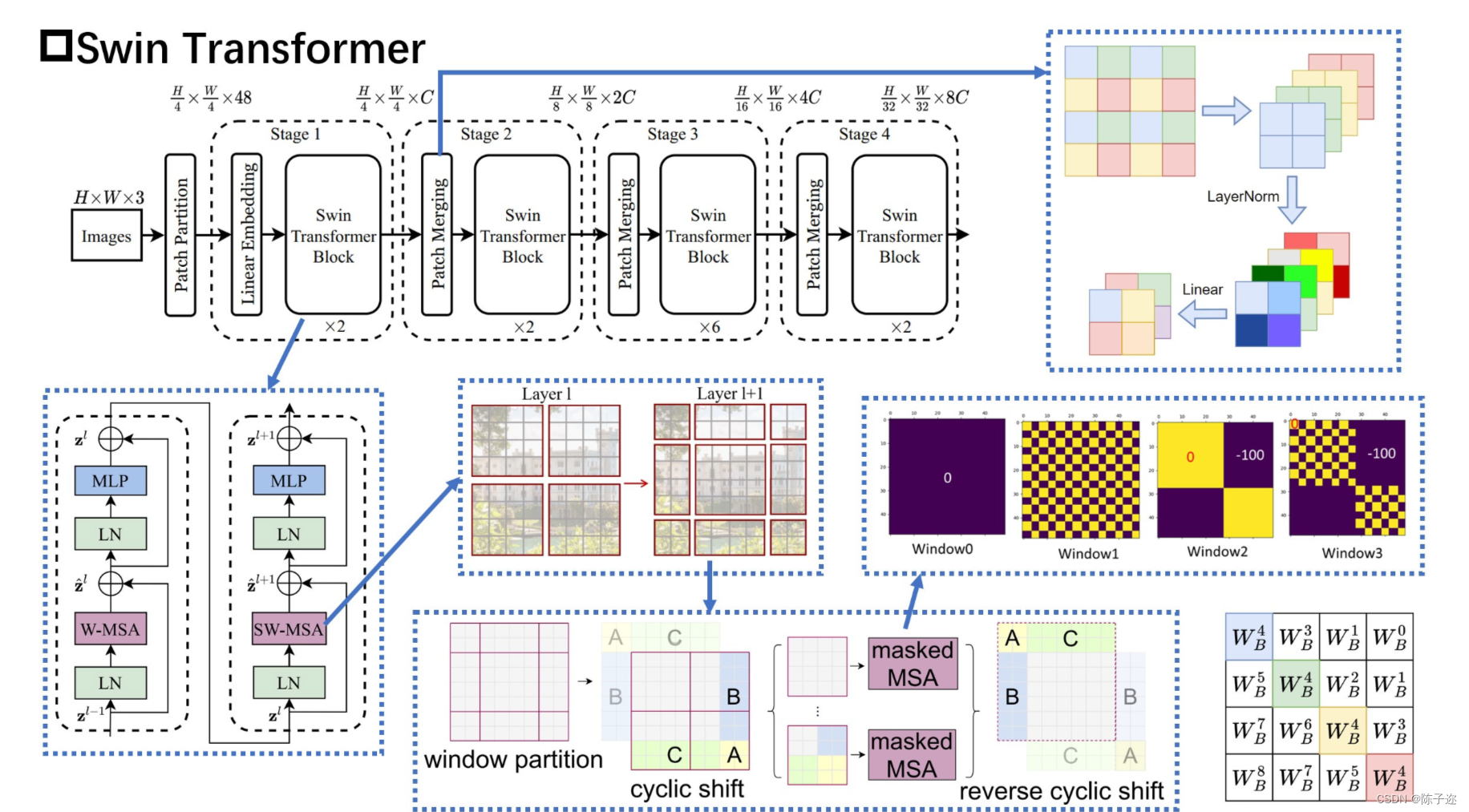
YOLOv5、YOLOv8改进:C3STR(Swin Transformer)
目录 1.介绍 2. YOLOv5、YOLOv8改进 2.1 common.py配置 2.2 yolo.py配置 2.3 yaml配置文件 1.介绍 视觉领域正在见证从 CNN 到 Transformers 的建模转变,纯 Transformer 架构在主要视频识别基准测试中达到了最高准确度。这些视频模型都建立在 Transformer 层之…...

Windows Cleaner:终极免费的Windows系统清理工具让C盘重获新生
Windows Cleaner:终极免费的Windows系统清理工具让C盘重获新生 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是否经常面对C盘爆红的警告而束手无策…...

电商客服+导购智能体的设计与开发指
这个代码的核心功能是:基于输入词的长度动态选择反义词示例,并调用大模型生成反义词,体现了 “动态少样本提示(Dynamic Few-Shot Prompting)” 与 “上下文长度感知的示例选择” 的能力。 from langchain.prompts impo…...

RAGflow 0.22.2 依赖镜像构建避坑指南:解决libssl缺失与HuggingFace下载难题
RAGflow 0.22.2 依赖镜像构建实战:从libssl缺失到HuggingFace模型下载的完整解决方案 在构建RAGflow 0.22.2自定义镜像的过程中,依赖镜像ragflow_deps的构建往往是第一个拦路虎。许多开发者在这里遭遇了各种意料之外的问题,从Ubuntu源中消失的…...

OpenClaw模型热切换:Qwen3.5-9B-AWQ-4bit与7B版本AB测试
OpenClaw模型热切换:Qwen3.5-9B-AWQ-4bit与7B版本AB测试 1. 为什么需要模型热切换 去年冬天,当我第一次尝试用OpenClaw搭建个人AI助手时,遇到了一个典型问题:处理简单图片时用9B模型太浪费,而复杂场景下7B模型又力不…...

编码检测终极指南:告别乱码的批量字符集检测解决方案
编码检测终极指南:告别乱码的批量字符集检测解决方案 【免费下载链接】EncodingChecker A GUI tool that allows you to validate the text encoding of one or more files. Modified from https://encodingchecker.codeplex.com/ 项目地址: https://gitcode.com/…...

Claude Code命令完全指南:从基础到高级的50+实用指令
Claude Code命令完全指南:从基础到高级的50实用指令 【免费下载链接】claude-code-guide Claude Code Guide - Setup, Commands, workflows, agents, skills & tips-n-tricks go from beginner to power user! 项目地址: https://gitcode.com/gh_mirrors/cla/…...

原神抽卡数据管理工具:从零开始的抽卡记录全掌控指南
原神抽卡数据管理工具:从零开始的抽卡记录全掌控指南 【免费下载链接】genshin-wish-export Easily export the Genshin Impact wish record. 项目地址: https://gitcode.com/GitHub_Trending/ge/genshin-wish-export 抽卡记录丢失怎么办?五星出货…...

S2-Pro Java项目开发实战:SpringBoot微服务集成AI能力
S2-Pro Java项目开发实战:SpringBoot微服务集成AI能力 1. 企业级Java项目如何拥抱AI能力 最近两年,AI技术在企业应用中的渗透率显著提升。作为Java开发者,我们经常面临这样的需求:如何在现有SpringBoot微服务架构中快速集成AI能…...
)
【C语言】-指针(1)
🦆 个人主页:深邃- ❄️专栏传送门:《C语言》《数据结构》 🌟Gitee仓库:《C语言》《数据结构》 目录内存和地址指针变量和地址指针变量和解引用操作符(*)指针变量的大小内存存放指针变量类型的…...
全流程)
PyTorch 2.8镜像快速验证:RTX 4090D执行torch.cuda.is_available()全流程
PyTorch 2.8镜像快速验证:RTX 4090D执行torch.cuda.is_available()全流程 1. 镜像环境概述 PyTorch 2.8深度学习镜像为RTX 4090D显卡深度优化,提供开箱即用的高性能计算环境。这个镜像专为24GB显存显卡设计,预装了完整的CUDA 12.4工具链和必…...