uvm白皮书练习_ch2_ch223_加入objection机制
UVM中通过objection机制来控制验证平台的关闭。
在每个phase中,UVM会检查是否有objection被提起(raise_ objection),如果有,那么等待这个objection被撤销(drop_objection)后停止仿真;如果没有,则马上结束当前phase。
目前将drop_objection语句当成是finish函数的替代者,只是在drop_objection语句之前必须先调用raise_objection语句,raise_objection和drop_ objection总是成对出现。
raise_objection语句必须在main_phase中第一个消耗仿真时间(所谓仿真时间,是指$time函数打印出的时间。与之相对的还有实际仿真中所消耗的CPU时间,通常说一个测试用例的运行时间即指CPU时间
如$display语句是不消耗仿真时间的,这些语句可以放在raise_objection之前,但是类似@(posedge top.clk)等语句是要消耗仿真时间的。
dut.sv
module dut (clk,rst_n,rxd,rx_dv,txd,tx_en
);input clk ; input rst_n ; input [7:0]rxd ; input rx_dv ; output txd ; output tx_en ; reg [7:0] txd;
reg tx_en; always @(posedge clk) beginif(!rst_n)begintxd <= 8'h00;tx_en <= 1'b0;endelse begintxd <= rxd;tx_en <= rx_dv;end
end
endmodule
TB
my_driver.sv
`ifndef MY_DRIVER_SV
`define MY_DRIVER_SVclass my_driver extends uvm_driver;`uvm_component_utils(my_driver) //加入factory机制function new(string name="my_driver",uvm_component parent =null);super.new(name,parent);endfunction //new()extern virtual task main_phase(uvm_phase phase);//调用附近的代码
endclass //my_driver extends uvm_drivertask my_driver::main_phase(uvm_phase phase);phase.raise_objection(this);//ch223加入objection机制top_tb.rxd <= 8'b0;//初始值复位top_tb.rx_dv <= 1'b0;while (!top_tb.rst_n) @(posedge top_tb.clk);//等个时钟for(int i =0;i<25;i++)begin@(posedge top_tb.clk);//等个时钟top_tb.rxd <= i[7:0];// top_tb.rxd <= $urand_range(0.255);top_tb.rx_dv <= 1'b1;`uvm_info("my_driver","data is driver",UVM_LOW);end@(posedge top_tb.clk);top_tb.rx_dv <= 1'b0;phase.drop_objection(this);//ch223加入objection机制endtask //my_driver::main_phase
`endif
top_tb.sv
`timescale 1ns/1ns
`include "uvm_macros.svh"import uvm_pkg::*;
`include "my_driver.sv"module top_tb ;
reg clk ; //时钟
reg rst_n ; //复位
reg [7:0] rxd ; //接受数据
reg rx_dv ; //接受数据
reg [7:0] txd ; //发送数据
reg tx_en ; //发送数据dut my_dut(
.clk (clk ),
.rst_n (rst_n),
.rxd (rxd ),
.rx_dv (rx_dv),
.txd (txd ),
.tx_en (tx_en)
);// initial begin
// my_driver drv;
// drv = new("drv",null);//传入数据
// drv.main_phase(null);
// $finish;
// end
initial beginrun_test("my_driver");
end
/*时钟模块*/
initial beginclk = 0;forever begin#100ns clk = ~clk;end
end
/*复位模块*/
initial beginrst_n = 1'b0;#1000;rst_n = 1'b1;
end/*fsdb*/
//initial begin
// $fsdbDumpfile("verilog.fsdb");
// $fsdbDumpvars(0);
// $display("fsdbDumpfilrs is start at %d",$time);
// // #1e7;
// // $finish;
//end
endmodule
仿真结果
将发送激励改成了25次
fsdbDumpfilrs is start at 0
UVM_INFO my_driver.sv(24) @ 13000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 15000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 17000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 19000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 21000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 23000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 25000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 27000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 29000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 31000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 33000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 35000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 37000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 39000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 41000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 43000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 45000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 47000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 49000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 51000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 53000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 55000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 57000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 59000: uvm_test_top [my_driver] data is driver
UVM_INFO my_driver.sv(24) @ 61000: uvm_test_top [my_driver] data is driver--- UVM Report Summary ---** Report counts by severity
UVM_INFO : 26
UVM_WARNING : 0
UVM_ERROR : 0
UVM_FATAL : 0
** Report counts by id
[RNTST] 1
[my_driver] 25
相关文章:

uvm白皮书练习_ch2_ch223_加入objection机制
UVM中通过objection机制来控制验证平台的关闭。 在每个phase中,UVM会检查是否有objection被提起(raise_ objection),如果有,那么等待这个objection被撤销(drop_objection)后停止仿真;…...
利用C++开发一个迷你的英文单词录入和测试小程序-增强功能
小玩具基本完成之后,在日常工作中,记录一些单词,然后定时再复习下,还真的有那么一点点用(毕竟自己做的小玩具)。 在使用过程中,遇到不认识的单词,总去翻译软件翻译,然后…...

kibana启动报错
1.响应 超过时间30000ms (1) docker rm elasticsearch #从docker中删除es docker rm kibana #从docker中删除kibana (2)重新安装启动es加大最大运行内存 :1024M docker run --name elasticsearch -p 9200:9200 -p 9300:9300 \ -e "discovery.typesingle-node" \ -…...
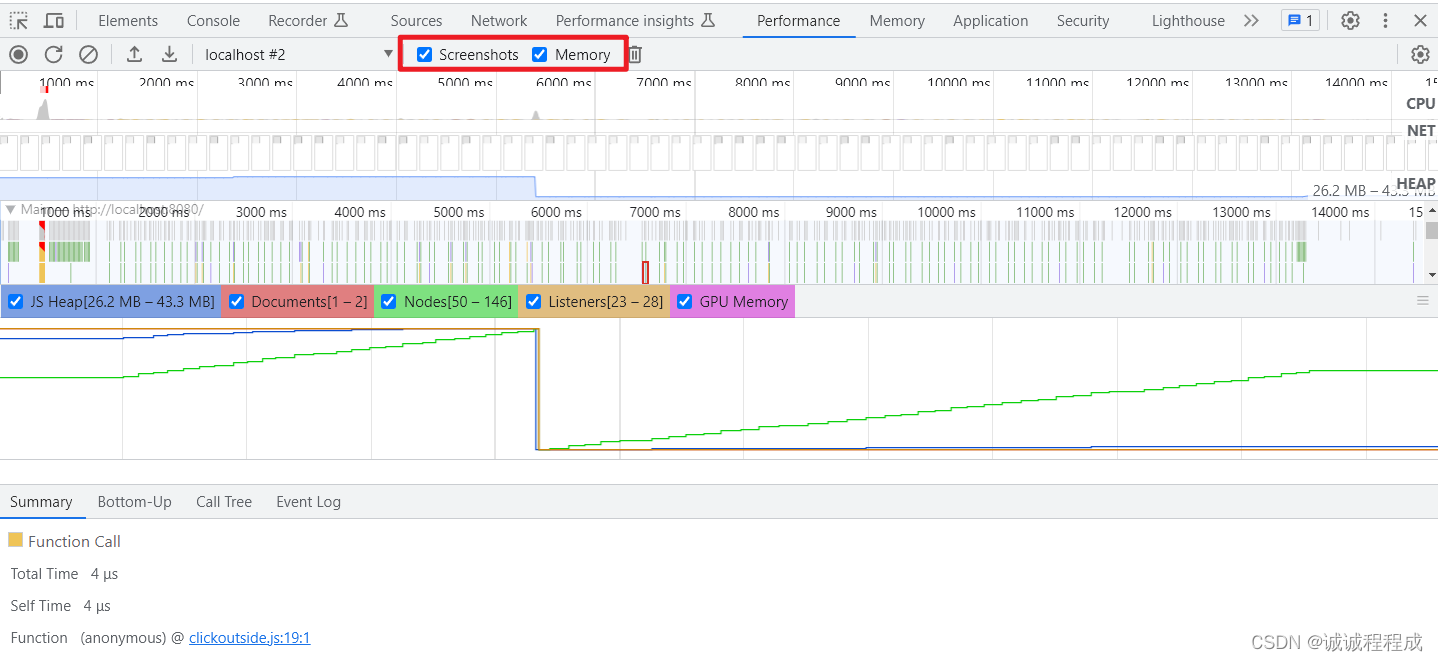
排查内存泄露
1 通过Performance确认是否存在内存泄露 一个存在内存泄露的 DEMO 代码: App.vue <template><div><button click"myFn" style"width: 200px; height: 200px;"></button><home v-if"ishow"></hom…...
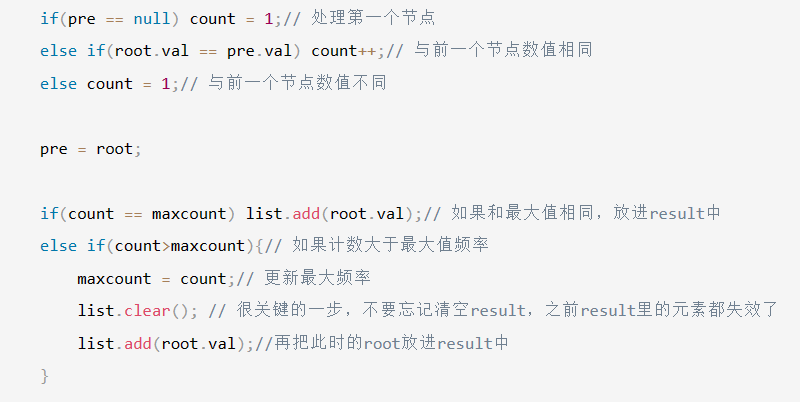
【LeetCode-简单题】501. 二叉搜索树中的众数
文章目录 题目方法一:暴力哈希方法二:利用二叉搜索树的特性(递归双指针) 题目 方法一:暴力哈希 这是针对于普通二叉树的解法 统计number出现次数 然后将次数最大的众数集 取出来 Map<Integer , Integer > map …...
MAC word 如何并列排列两张图片
系统:MAC os 参考博客 https://baijiahao.baidu.com/s?id1700824516945958911&wfrspider&forpc 步骤1 新建一个word文档和表格 修改表格属性 去掉自动重调尺寸以适应内容 插入图片 在表格的位置插入对应的图片如下 去除边框 最终结果如下...

PTA第三章作业题
文章目录 前言7-1 比较大小Ⅰ. 方法一 :直接判断法Ⅱ. 方法二:交换法 7-2 比较两个数的大小Ⅰ. 方法 :直接判断法 7-3 成绩等级Ⅰ. 方法 :直接判断法 7-4 打鱼晒网Ⅰ. 方法 :直接判断法 7-5 计算奖金Ⅰ. 方法 …...
vscode vue html 快捷键
css文件 选择多行 按下ctrl不放 按下鼠标滚轮不放(鼠标中键) 鼠标向下移动 同时修改多个相同的字符串 <style> .base-goods-item li {width: 304px;height: 404px;background-color: #eef9f4; } .base-goods-item li {display: block; } .base-…...

mysql锁相关的总结
1、参考文章 MySQL 主键索引在 RR 和 RC 隔离级别下的加锁情况总结_51CTO博客_mysql二级索引加锁 2、 show OPEN TABLES where In_use > 0; -- 类似rc的需求 show variables like innodb_locks_unsafe_for_binlog; SELECT * FROM INFORMATION_SCHEMA.INNODB_TRX; -- …...

计算机竞赛 深度学习乳腺癌分类
文章目录 1 前言2 前言3 数据集3.1 良性样本3.2 病变样本 4 开发环境5 代码实现5.1 实现流程5.2 部分代码实现5.2.1 导入库5.2.2 图像加载5.2.3 标记5.2.4 分组5.2.5 构建模型训练 6 分析指标6.1 精度,召回率和F1度量6.2 混淆矩阵 7 结果和结论8 最后 1 前言 &…...

docker-compose搭建的mysql,如何定时备份数据
一、前言 使用docker-compose搭建的mysql中自带了mysqldump,所以在服务器上如何使用容器中的mysqldump命令是实现备份的原理,下面是主要实现的命令 docker exec -it mysql mysqldump -u root -p$mysql_password $database_name > $backup_file二、备…...

webpack:关于处理html文件的插件html-webpack-plugin、add-asset-html-webpack-plugin
简介 add-asset-html-webpack-plugin 将 JavaScript或CSS文件添加到由html-webpack-plugin插件生成的HTML中去。 html-webpack-plugin 默认配置会在出口目录中(通过output.path选项配置)生成一个index.html文件; 生成的index.html文件将会…...

如何两个不同的脚本文件之间传递参数
两个不同的Shell脚本之间如何访问传递的参数取决于它们是如何调用的。如果一个Shell脚本1调用另一个Shell脚本2并且想要将参数传递给被调用的脚本2,可以使用以下方法: 方法1:通过位置参数传递参数 这是一种常见的方法,其中一个脚…...

一篇文章彻底搞懂熵、信息熵、KL散度、交叉熵、Softmax和交叉熵损失函数
文章目录 一、熵和信息熵1.1 概念1.2 信息熵公式 二、KL散度和交叉熵2.1 KL散度(相对熵)2.2 交叉熵 三、Softmax和交叉熵损失函数3.1 Softmax3.2 交叉熵损失函数 一、熵和信息熵 1.1 概念 1. 熵是一个物理学概念,它表示一个系统的不确定性程度,或者说是…...
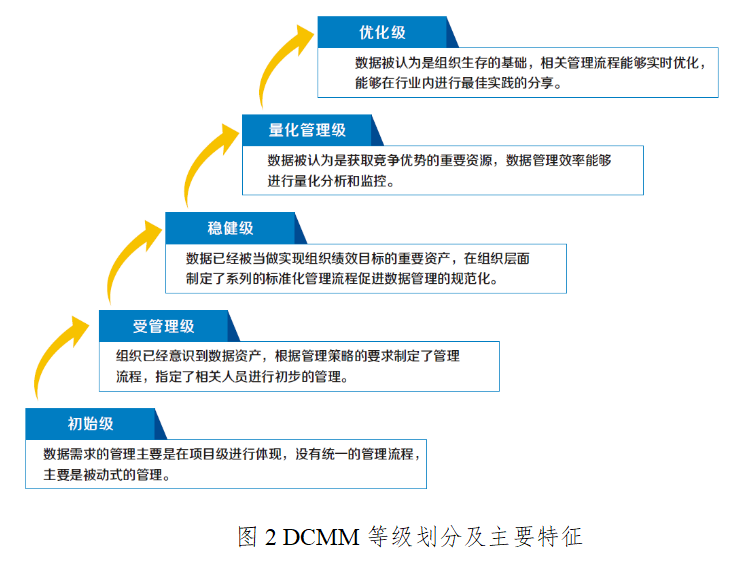
[架构之路-223]:数据管理能力成熟度评估模型DCMM简介
目录 一、背景 二、评估依据 三、评估内容 四、主要适用对象 五、能力等级 六、不同层次的文件: 一、背景 信息技术与经济社会的交汇融合引发了数据爆发式增长。数据蕴含着重要的价值,已成为国家基础性战略资源,正日益对全球生产、流通…...
)
十大排序算法的实现(C/C++)
以下是十大经典排序算法的简单 C 实现: 冒泡排序(Bubble Sort): 思想:重复地遍历要排序的列表,比较相邻的两个元素,如果它们的顺序错误就交换它们。时间复杂度:最坏情况和平均情况…...

HTML+CSS综合案例一新闻详情
<!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>新闻详情</title><style>h1{text-align…...

【Spring Boot】实战:实现Session共享
🌿欢迎来到@衍生星球的CSDN博文🌿 🍁本文主要学习实现Session共享 🍁 🌱我是衍生星球,一个从事集成开发的打工人🌱 ⭐️喜欢的朋友可以关注一下🫰🫰🫰,下次更新不迷路⭐️💠作为一名热衷于分享知识的程序员,我乐于在CSDN上与广大开发者交流学习。 💠我…...
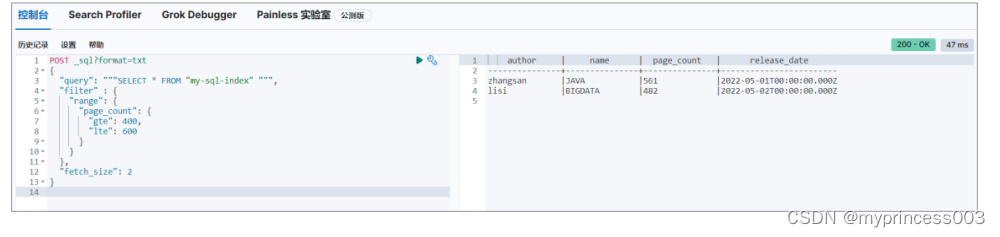
3、Elasticsearch功能使用
第4章 功能使用 4.1 Java API 操作 随着 Elasticsearch 8.x 新版本的到来,Type 的概念被废除,为了适应这种数据结构的改 变,Elasticsearch 官方从 7.15 版本开始建议使用新的 Elasticsearch Java Client。 4.1.1 增加依赖关系 <propertie…...
数据链路层协议
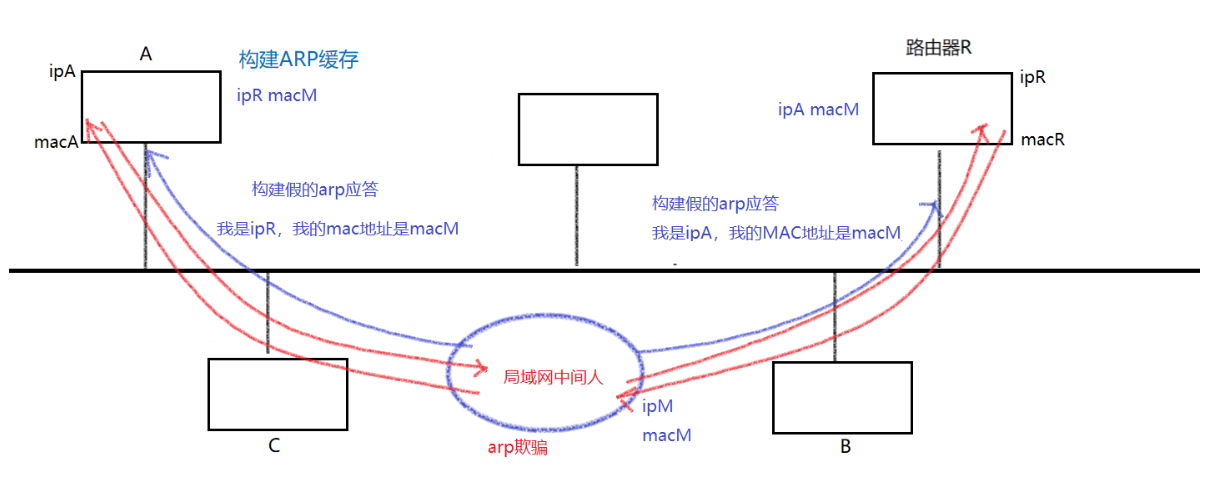
文章目录 数据链路层协议0. 数据链路层解决的问题1. 以太网协议(1) 认识以太网(2) 以太网帧格式<1> 两个核心问题 (3) 认识MAC地址(4) 局域网通信原理(5) MTU<1> 认识MTU<2> MTU对IP协议的影响<3> MTU对UDP协议的影响<4> MTU对TCP协议的影响<…...

终极Ryzen调校指南:用SMUDebugTool解锁AMD平台隐藏性能
终极Ryzen调校指南:用SMUDebugTool解锁AMD平台隐藏性能 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https://g…...
实战:从自然行为到工程优化)
【智能算法】长鼻浣熊优化算法(COA)实战:从自然行为到工程优化
1. 长鼻浣熊优化算法(COA)初探 第一次听说长鼻浣熊优化算法(COA)时,我正为一个工业参数优化问题头疼不已。传统遗传算法在这个问题上陷入了局部最优,粒子群优化又收敛得太快。直到看到2023年M Dehghani团队…...
)
【VScode】STM32CubeMX+VScode开发编译下载STM32程序(基于Cmake工程)
【VScode】STM32CubeMXVScode开发STM32程序(基于Cmake工程) 文章目录准备工作安装上述软件(略)为VScode配置隔离开发环境-cubeMX为新环境安装插件1. 安装STM32CubelIDE for Visual Studiio Code插件2. 安装Cortex-Debug插件3. 安装…...

OmenSuperHub:让你的惠普OMEN游戏本性能全开,告别官方臃肿软件
OmenSuperHub:让你的惠普OMEN游戏本性能全开,告别官方臃肿软件 【免费下载链接】OmenSuperHub 使用 WMI BIOS控制性能和风扇速度,自动解除DB功耗限制。 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 还在为惠普OMEN游戏…...

单传感器肌电假肢:DTW算法实现92%识别准确率
1. 项目概述肌电假肢技术在过去几十年里取得了显著进展,但传统多传感器系统的高成本和复杂性仍然是阻碍其普及的主要障碍。作为一名从事生物医学工程研究多年的从业者,我一直在寻找更经济高效的解决方案。这项研究提出了一种创新方法:仅使用单…...

5分钟掌握STDF-Viewer:半导体测试数据分析的图形化神器
5分钟掌握STDF-Viewer:半导体测试数据分析的图形化神器 【免费下载链接】STDF-Viewer A free GUI tool to visualize STDF (semiconductor Standard Test Data Format) data files. 项目地址: https://gitcode.com/gh_mirrors/st/STDF-Viewer STDF-Viewer是一…...

Linux|操作系统|zfs文件系统的使用详解
一、 前言概述 书接上回,https://zskjohn.blog.csdn.net/article/details/160741859 Linux|操作系统|最新版openzfs编译记录,上文将zfs文件系统编译安装完毕了,也做了一些总结,但总结的不够全面,本文在做一些补充&am…...

运动数据解读总卡壳?用NotebookLM自动提炼文献+生成假设,3天完成1篇SCI初稿
更多请点击: https://codechina.net 第一章:运动数据解读的瓶颈与AI赋能新范式 传统运动数据分析长期受限于人工标注成本高、多源异构信号对齐困难、时序模式泛化能力弱三大瓶颈。可穿戴设备每秒采集的加速度、陀螺仪、心率变异性(HRV&#…...

证件照换装API实战指南:一键换装,告别服装不合格!
还在为证件照服装不符合要求而烦恼?可立图ClipImg证件照换装API,自动识别身形与姿态,一键替换为正装,让你的照片瞬间专业起来!一、痛点场景:你的证件照是否也遇到过这些尴尬吗?求职简历…...

多智能体协同控制未来的前景和方向如何?
在AI技术快速演进的今天,单一智能体已难以满足企业复杂业务场景的需求,多智能体协同正成为行业关注的焦点,它通过多个智能体分工协作、动态交互,形成更强大、更灵活的数字员工团队,有望重塑企业运营模式,推…...