自动驾驶领域中的CMS系统应用探讨
由佐思汽研主办的“ ICVS汽车智能网联大会”正式启幕,邀请Tier1、软件供应商、操作系统商、智能驾驶及智能驾舱相关企业,共同探讨行业现状、创新技术应用交流、以及未来行业发展趋势等。
赛格导航视频产品线总监刘玉龙应邀参加本次大会,并发表主题演讲,他谈到,赛格导航拥有24年的汽车智能网联产品研发与制造经验,为国内众多主机厂供应车载零部件,产品覆盖车载远程信息终端(5G/V2X、高精度定位模块、T-BOX)、车身智能控制系统(域控制器、智能网关、BCM)、车载视觉控制模块(360环视系统、CMS电子后视系统、新国标视频机)等领域,此次演讲围绕《CMS在自动驾驶领域中的应用》与业界同仁分享交流,重点探讨CMS技术优势与系统方案,以及CMS在逐步迈入自动驾驶的发展阶段可集成可扩展的应用探讨。
CMS系统技术优势
2022年12月29日,中国汽车后视镜新国标GB15084-2022《机动车辆间接视野装置性能和安装要求》正式发布,意味着搭载CMS的车辆可以从2023年7月1日起正式合法量产上路。新国标GB 15084对机动车间接视野装置进行了明确的划分,大致可分为七类视野,内部视野装置属于一类性,二类到七类都属于属于外部视野装置。
电子后视镜是由摄像头+车内显示屏替代传统的反射镜,电子后视镜主要分为电子内后视镜和电子外后视镜,其中电子内后视镜常被称为流媒体后视镜,电子外后视镜则一般用电子后视镜(CMS)直接指代。
相较传统物理镜存在“看不全、看不清、受干扰、风阻大”的问题,CMS具有视野更加宽阔、减少盲区、可通过图像调优算法(ISP)大幅降低外界光线干扰、对抗雨雪雾恶劣天气影响的能力强等优点, 并且CMS 摄像头后视镜横截面积能缩小为传统玻璃外后视镜的二分之一乃至更低,能有效降低风阻和风噪,实现节能减排。
车载CMS系统方案
商用车和乘用车CMS 系统都是由摄像头、显示屏、控制器三部分构成,但是商用车方案比乘用车更复杂,赛格导航已完成CMS系统在乘用车商用车领域的产品预研开发及技术验证。乘用车 CMS 系统一般由 2 个显示屏+2 个左右外耳摄像头+集成 1 个流媒体后视镜(选配) +控制器构成,控制器可独立可集成。由于CMS系统对图像实时传输性能要求高,任何长延时的图像都有可能造成判断失误,因此CMS系统的视频图像只能通过数字方式传输,以最大限度减小延时。目前新国标对电子后视镜的延迟时间要求是小于200毫秒,实际上,超过30毫秒的延时就能被感知到,所以赛格导航目前的解决方案主要有两种:一是用FPGA,延时约20毫秒,几乎察觉不到;二是ARM,延时约50毫秒。这两种方案都远优于新国标的延时要求。
商用车 CMS 系统方案复杂度更高,因为商用车屏幕和所要呈现的区域会多一些(前盲区+下盲区+左盲区+右盲区),因此商用车 CMS 方案在外侧摄像头通道数会更多,由左侧 2 个+右侧 2 个+前面 1 个(选装)+后侧 1 个(选装)摄像头构成,商用车显示屏比乘用车更大,左右2 个主显示屏一般是 12.3 寸屏,可以在同一块屏的上下两个不同区域分屏显示同一侧二类镜和四类镜画面,而五类镜、六类镜可以同时分屏显示在 1 个显示屏中。在基础后视方案上,赛格导航增强版方案增加了360全景功能。
自动驾驶视觉传感器现状
视觉仍然是最主要的感知手段,车载摄像头作为自动驾驶中应用范围最广的视觉传感器,一般含括几个应用场景:侧方后视、前视宽视野、前视主视野、前视窄视野、后视、侧方前视,每个场景使用的摄像头都有不同的功能,对镜头的要求也不一样。依赖摄像头完成的ADAS功能如车道偏离预警、前向碰撞预警、行人碰撞预警、车道保持辅助等都是前置的摄像头,因为汽车使用过程中,绝大多数时间是前向行驶的,所以前向检测功能要求的最多,检测范围和精度要求也最高。
目前能够实现L3/L4级别自动驾驶功能的汽车,前视摄像头分辨率普遍达到800万,模组的视场角可以到120度,最远可以识别550m外的行人、车辆和特定形状的物体。除前视之外的视觉检测范围包括360环视、侧视、倒车后视、流媒体后视,这些摄像头的视野范围在5m-50m,分辨率要求相对低,200万像素可以满足大部分场景的应用,CMS系统的应用范围正好可以涵盖这些视野。
CMS 可扩展为自动驾驶的“眼睛”
CMS系统作为智能行车辅助,锚定城市行车场景的痛点,在变道、倒车、转弯、泊车带来动态视野调整,并融合ADAS、DMS、OMS等系统,实现人脸识别、车内监控、疲劳预警、驾驶员监测、行为监测、视线追踪功能,在显示屏主动标记报警提示,它们由一个或者两个摄像头完成识别,解析度和识别距离都相对较低,符合低速控制系统的应用范围。
由于CMS系统法规的出台,如果车辆采用电子后视系统取代了物理后视镜,则车内的显示屏、流媒体屏和电子后视镜的显示屏就必须始终处于工作状态,并显示相应的车外图像。这些显示屏不仅可以显示图像,还可以进行提醒,显示车内外摄像头的检测结果和内容,如图标或图示等,这些内容显示可以用叠加UI的形式显示到屏上,显示的时间和时机位于驾驶员的观察位置和方向,以便驾驶员能够准确获取到这些信息。
我们可能在未来相当长的一段时间内都处于非自动驾驶或半自动驾驶的阶段,在实现完全自动驾驶之前,L3或L3以下级别的驾驶都需要摄像头对驾驶员的行为状态进行监测,CMS替代后视镜的摄像头可以集成ADAS类型的辅助驾驶功能及智能网联相关功能,并在车内的适当显示器上实时显示视觉信息,扩展为自动驾驶的“眼睛”。
我们对未来自动驾驶的构想是,在信号灯控制的交通路口、地上和地下停车场、辅道、环岛、工业园区道路等低速场景下使用集成的CMS提醒和提示功能,在高速公路、城市主干道、快速路、国道、省道等高速场景下使用自动驾驶系统控制车辆行驶状态,用这两套系统覆盖全场景的自动驾驶。
【以上信息由艾博检测整理发布,如有出入请及时指正,如有引用请注明出处,欢迎一起讨论,我们一直在关注其发展!专注:CCC/SRRC/CTA/运营商入库】
相关文章:

自动驾驶领域中的CMS系统应用探讨
由佐思汽研主办的“ ICVS汽车智能网联大会”正式启幕,邀请Tier1、软件供应商、操作系统商、智能驾驶及智能驾舱相关企业,共同探讨行业现状、创新技术应用交流、以及未来行业发展趋势等。 赛格导航视频产品线总监刘玉龙应邀参加本次大会,并发…...

十分钟理解OSPF路由协议
十分钟理解OSPF路由协议 1.RIP的缺陷以跳数为度量值最大跳数为15更新路由表采用全更新收敛速度慢 2.RIP与OSPF比较OSPF概述运行OSPF协议之前运行OSPF协议之后 3.OSPF协议工作过程1.发现邻居2.建立邻接关系3.传递链路状态信息4.计算路由 4.OSPF分区域管理 有RIP协议,…...

Python 编程基础 | 第一章-预备知识 | 1.4、包管理工具
一、包管理工具 1、pip简介 pip是Python自带的包管理器,它可以帮助我们安装、升级和卸载Python包。Python包是一组Python模块,它们可以提供各种功能,例如数据分析、Web开发、机器学习等等。pip可以让我们轻松地安装这些包,以便我…...
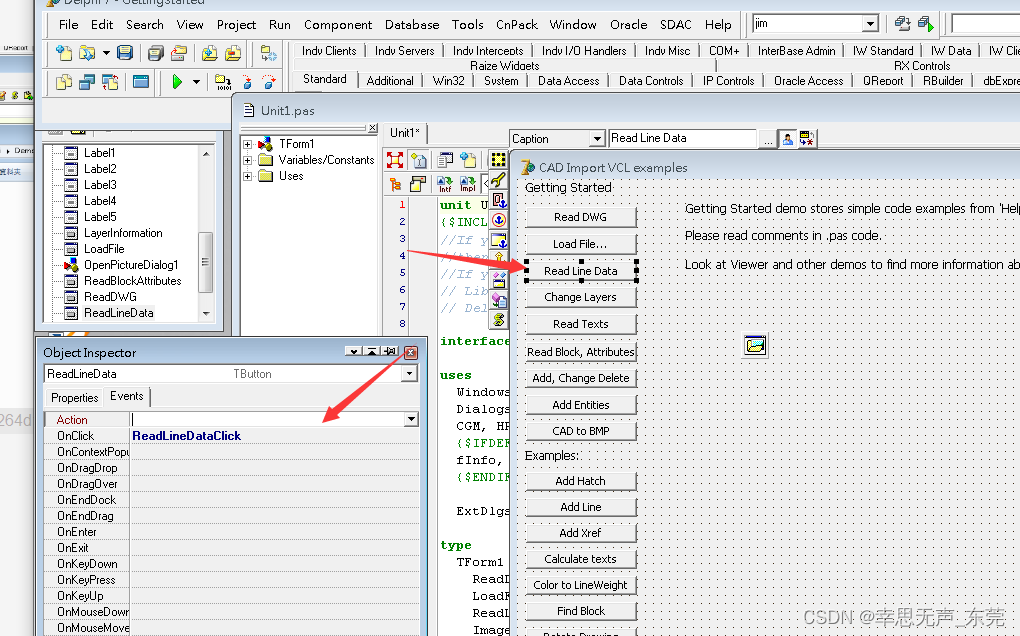
delphi中使用CADVCL 10.0 Enterprise控件解析DXF文件生成图片保存到本地
使用案例demos中GettingStarted案例 修改OnClick方法 更换代码 varvDrawing: TsgCADDXFImage;I: Integer;vEnt: TsgDXFEntity;vDXFImage:TsgCADImage;Bitmap: TBitmap;jpg: TJpegImage; beginvDrawing : TsgCADDXFImage.Create;vDrawing.LoadFromFile(d:\Entities.dxf);for …...
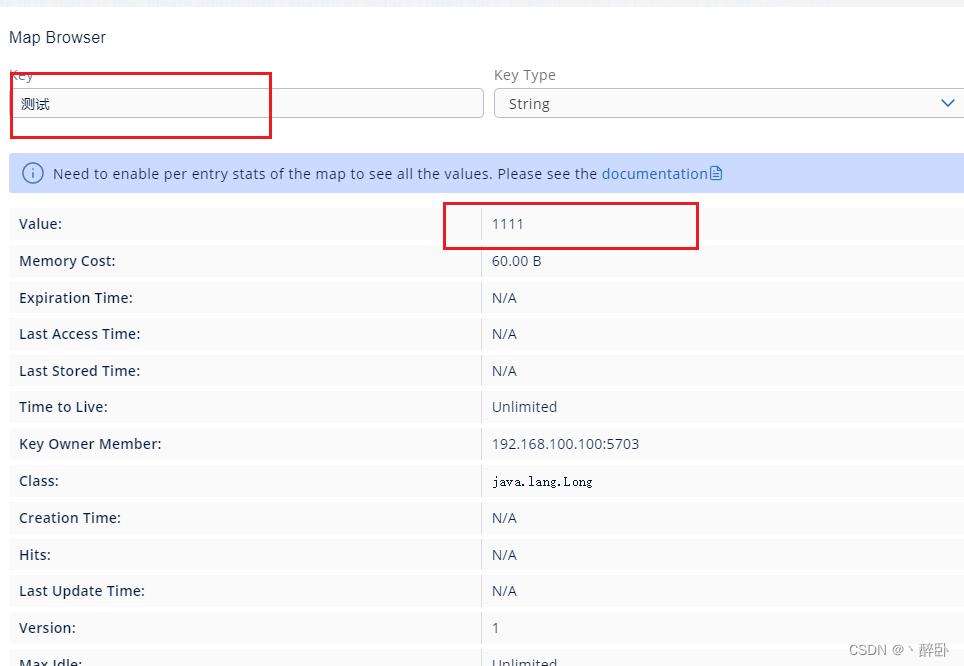
Hazelcast系列(三):hazelcast管理中心
系列文章 Hazelcast系列(一):初识hazelcast Hazelcast系列(二):hazelcast集成 Hazelcast系列(三):hazelcast管理中心 目录 前言 平台搭建 测试 其他 参考 总结 前言 前面,我们通过几种配置方式(Hazelcast系…...
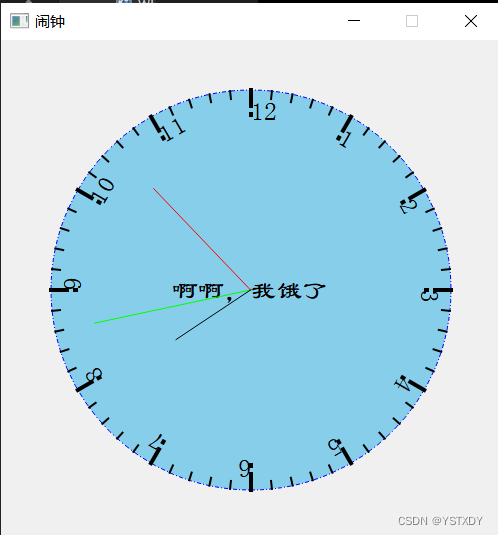
QT 绘画功能的时钟
.h #ifndef WIDGET_H #define WIDGET_H#include <QWidget> #include <QPaintEvent> #include <QDebug> //信息调试类 #include <QPainter> #include <QPixmap> //图像引擎类 #include <QTime> #include <QTimer> …...
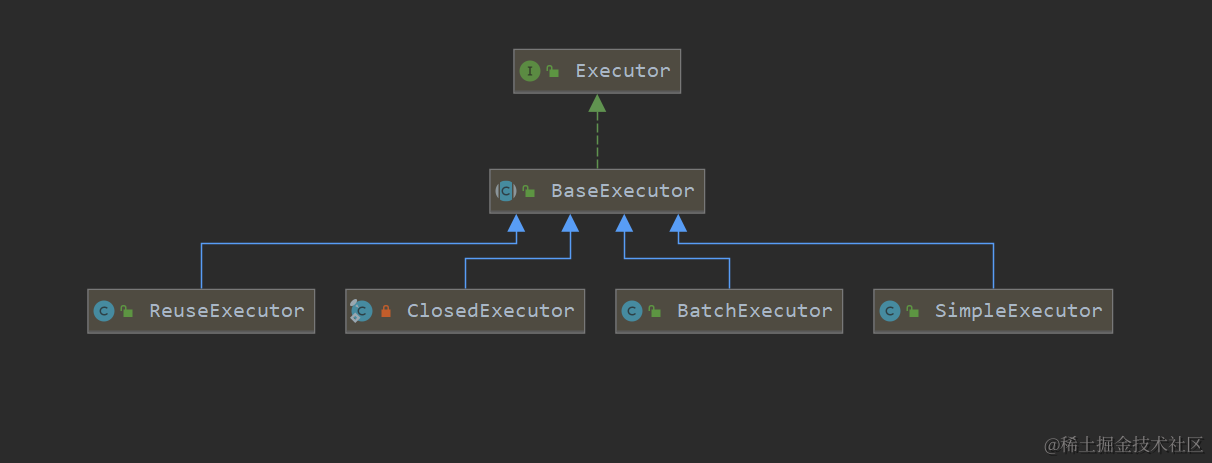
设计模式之道-模板方法模式
文章目录 模板方法模式简介作用模板方法模式的缺点模板方法模式的应用场景业务场景开源框架中的应用 对比回调和Hook模式关于组合优先于继承 关于设计模式乱用的现象 模板方法模式 简介 模板方法模式是一种行为型设计模式,该设计模式的核心在于通过抽象出一套相对…...

头哥的实践平台的Linux文件/目录管理
一 Linux 文件/目录管理 1.本关的编程任务是补全右侧代码片段中Begin至End中间的代码,具体要求如下: 新创建两个文件空文件file1和file2。 删除系统已存在的两个文件oldFile1和oldFile2。 #!/bin/bash#在以下部分写出完成任务的命令 #***********begi…...
软件测试基本常识
【软件测试面试突击班】如何逼自己一周刷完软件测试八股文教程,刷完面试就稳了,你也可以当高薪软件测试工程师(自动化测试) 一、测试用例的编写 1.在测试中最重要的文档,他是测试工作的核心,是一组在测试时…...
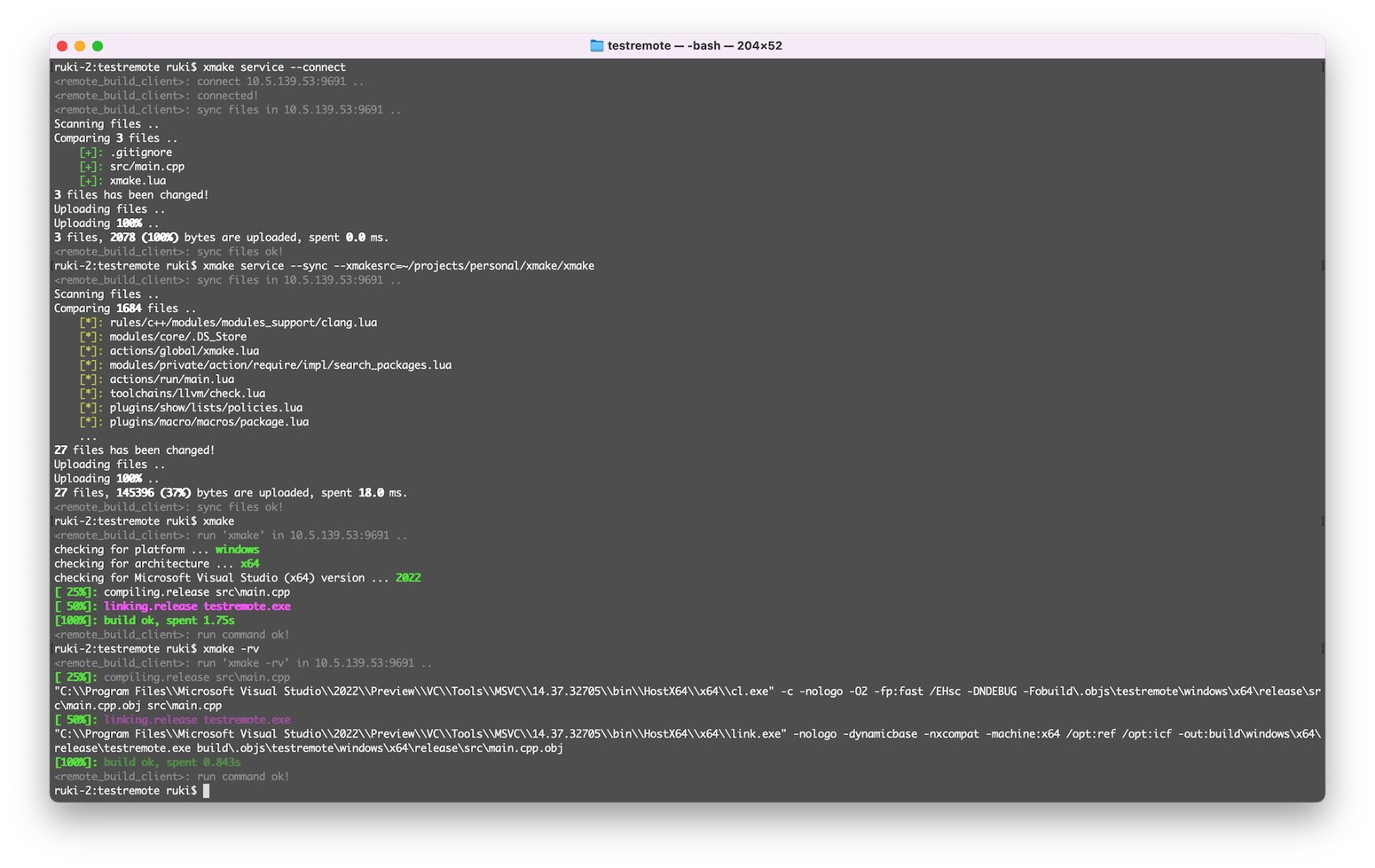
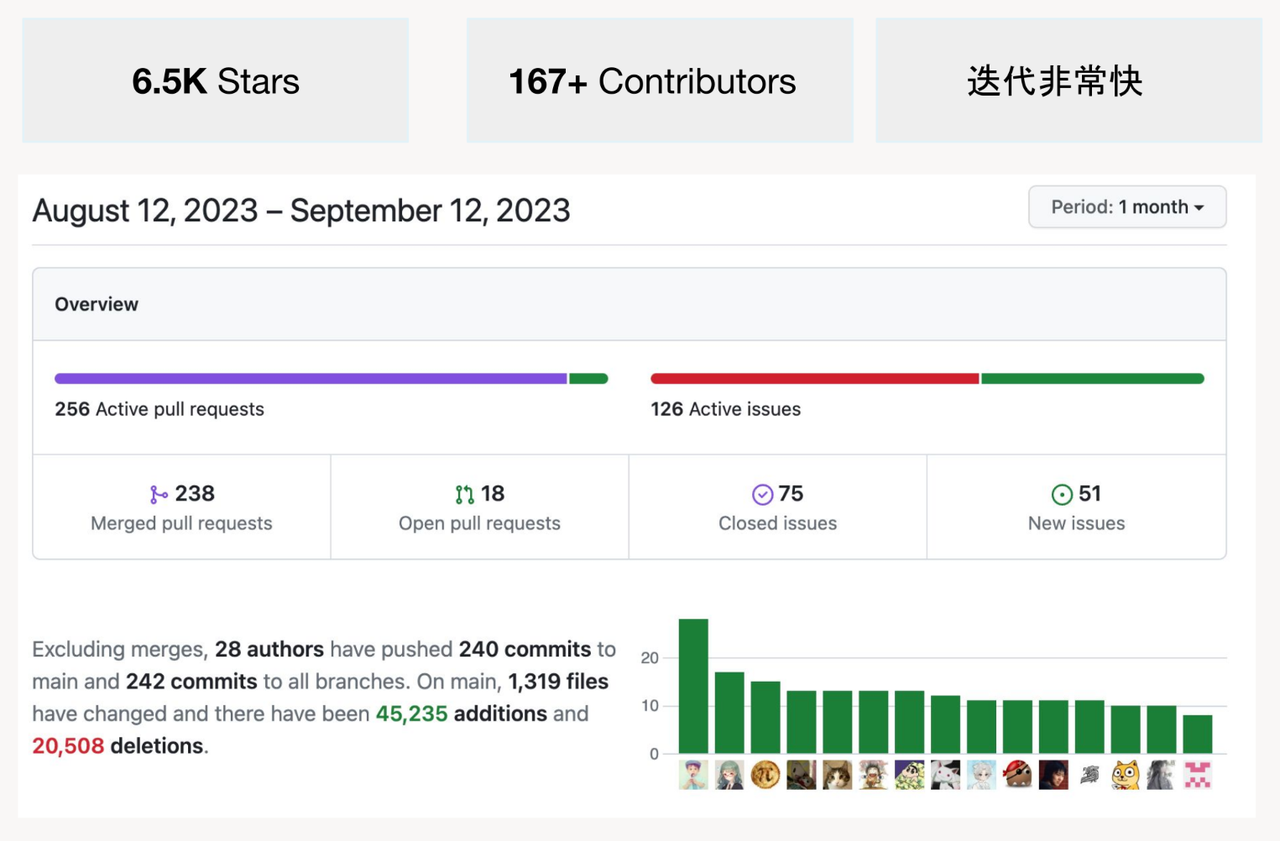
Xmake v2.8.3 发布,改进 Wasm 并支持 Xmake 源码调试
Xmake 是一个基于 Lua 的轻量级跨平台构建工具。 它非常的轻量,没有任何依赖,因为它内置了 Lua 运行时。 它使用 xmake.lua 维护项目构建,相比 makefile/CMakeLists.txt,配置语法更加简洁直观,对新手非常友好&#x…...
Serverless 数仓技术与挑战(内含 PPT 下载)
近期,Databend Labs 联合创始人张雁飞发表了题为「Serverless 数仓技术与挑战」的主题分享。以下为本次分享的精彩内容: 主题: 「Serverless 数仓技术与挑战」 演讲嘉宾: 张雁飞 嘉宾介绍: Databend Labs 联合创始人…...

九牧小牧携手国家队!一场“中国卫浴“和“中国体育”的双向奔赴
文 | 螳螂观察 作者 | 余一 1990年中国第一次举办了综合性国际体育大赛——北京亚运会,来自37个国家和地区,共计6578人的体育代表团参加了那届亚运会,一首《亚洲雄风》成为无数人记忆中的经典。 2023年杭州亚运会于近日正式拉开了帷幕&…...

crypto:Quoted-printable
题目 解压文件后可得到提示文本 好了这个没接触过,参考别的大佬wp QP为可打印字符编码,根据加密方式任何一个8位的字节值可编码为3个字符:一个等号“”后跟随两个十六进制数字(0–9或A–F)表示该字节的数值。 利用网…...

【六级】作文模板-议论文-问题解决
视频来源: https://www.bilibili.com/video/BV1vK4y1e7A6/?spm_id_from333.880.my_history.page.click&vd_sourcefb8dcae0aee3f1aab700c21099045395 1、前言 两类作文: 议论文 (how to 问题解决型) what 某种现象 漫画 &…...
leetcodetop100 (22) 反转链表
给你单链表的头节点 head ,请你反转链表,并返回反转后的链表 简单的用一个动态数组Arraylist记录,然后倒序遍历赋值给一个新的链表,这种空间复杂度是o(n),估计需要优化。 采用双指针; 我们可以申请两个指针…...

RabbitMQ配置文件_修改RabbitMQ MQTT的1883端口
Centos离线安装RabbitMQ并开启MQTT Docker安装rabbitMQ RabbitMQ集群搭建和测试总结_亲测 Docker安装RabbitMQ集群_亲测成功 rabbitmq.conf 默认没有配置文件,可以手动创建: /etc/rabbitmq/rabbitmq.conf # # RabbitMQ broker section # ## Related doc guide: https://…...
【Graph Net学习】LINE实现Graph Embedding
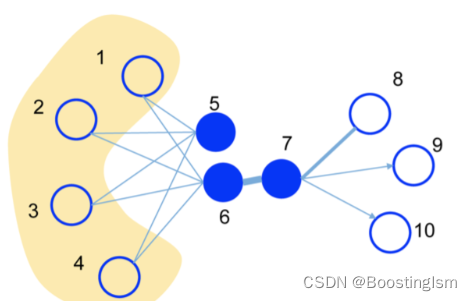
一、简介 LINE (Large-scale Information Network Embedding,2015) 是一种设计用于处理大规模信息网络的算法。它主要的目标是在给定的大规模信息网络中学习高质量的节点嵌入,并尽量保留网络中信息的丰富性。其具体的表现为在一个低 维空间里以向量形式表示网络中的…...
docker安装使用xdebug
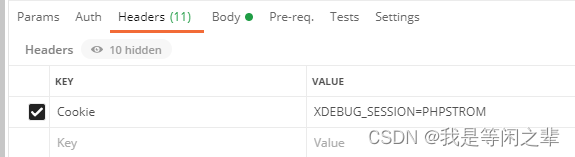
docker安装使用xdebug 1、需要先安装PHP xdebug扩展 1.1 到https://pecl.php.net/package/xdebug下载tgz文件,下载当前最新稳定版本的文件。然后把这个tgz文件放到php/extensions目录下,记得install.sh中要替换解压的文件名: installExtensio…...
(1) ESP32获取图像,并通过电脑端服务器显示图像
目录 一、所需器件工具 二、客户端与服务器进行UDP通信 1、客户端代码 2、服务器端代码 3、效果展示 三、客户端拍照,通过UDP传输到服务器进行显示 1、客户端获取图像并UDP传输 2、电脑端服务器显示图像 3、效果展示 四、代码链接 一、所需器件工具 1.ESP3…...
乐鑫科技全球首批支持蓝牙 Mesh Protocol 1.1 协议
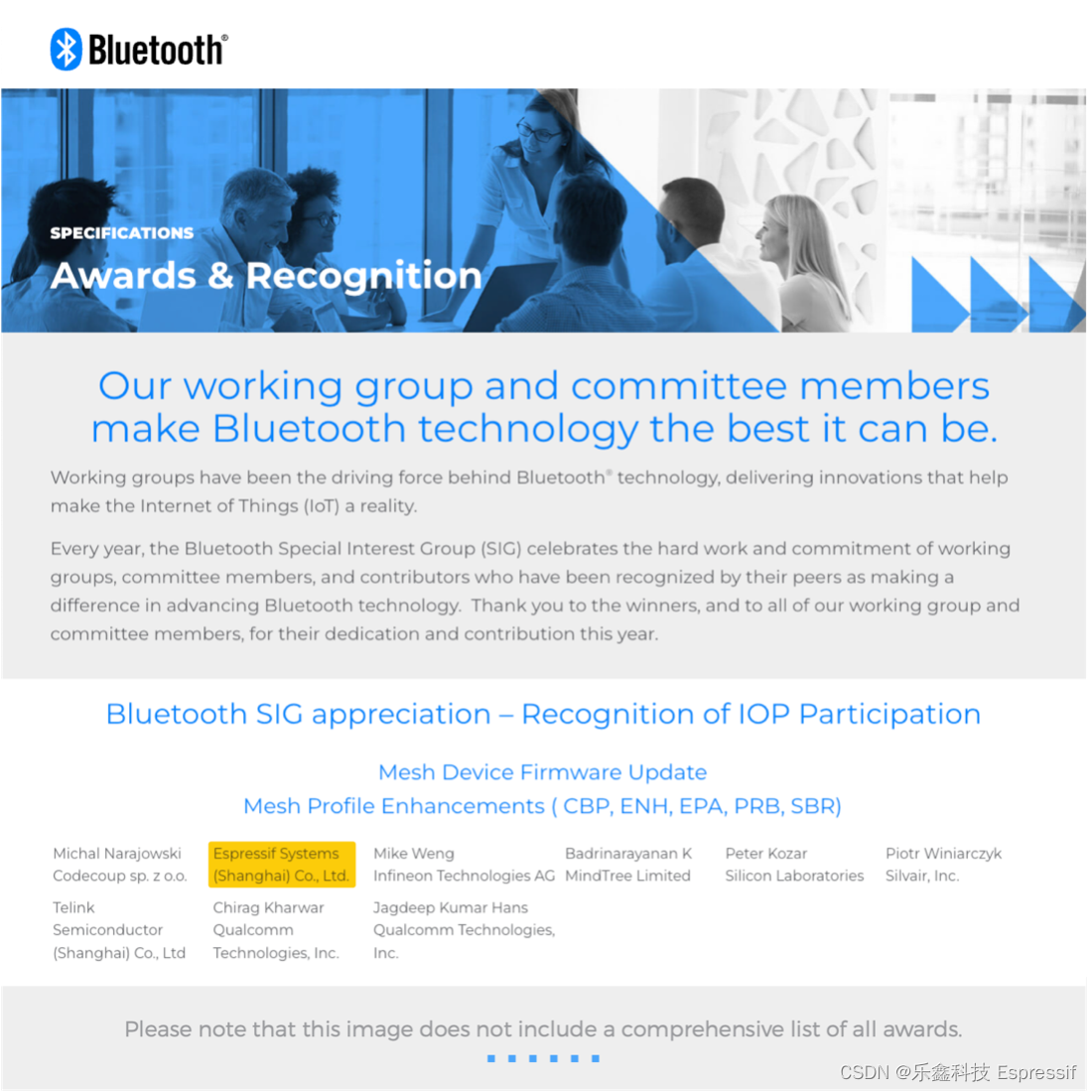
乐鑫科技 (688018.SH) 非常高兴地宣布,其自研的蓝牙 Mesh 协议栈 ESP-BLE-MESH 现已支持最新蓝牙 Mesh Protocol 1.1 协议的全部功能,成为全球首批在蓝牙技术联盟 (Bluetooth SIG) 正式发布该协议之前支持该更新的公司之一。这意味着乐鑫在低功耗蓝牙无线…...

开源技能库构建指南:Git+Markdown+Docsify打造个人技术知识体系
1. 项目概述:一个开源技能库的诞生与价值在技术领域,尤其是软件开发、运维和数据分析等方向,我们每天都在与海量的工具、框架和命令打交道。时间一长,一个很现实的问题就摆在了面前:那些曾经花了好几个小时才调通的复杂…...

告别答辩PPT焦虑:百考通AI智能生成,高效搞定毕业答辩全流程
毕业季悄然来临,随着毕业论文定稿,答辩PPT成了不少同学面临的下一个挑战。不懂设计、不会梳理逻辑、找不到合适的学术模板……许多同学花费大量时间在排版调整、修改打磨上,不仅效率低下,还常常做出结构混乱、风格不统一的PPT&…...

2026生鲜店收银软件特点功能对比
每天傍晚高峰期,生鲜店门口排起的长队总是让店主心头一紧。顾客手里拿着刚挑好的蔬菜水果,眼神里透着急切,而收银台前的店员却还在手忙脚乱地查找商品代码、手动输入重量,甚至因为系统卡顿导致支付失败。这种场景不仅流失了潜在客…...
)
乌尔都语语音合成落地难?揭秘ElevenLabs未公开的ur-PK语言代码陷阱与ISO 639-3双标适配规范(仅限首批127家认证开发者知晓)
更多请点击: https://intelliparadigm.com 第一章:乌尔都语语音合成落地难?揭秘ElevenLabs未公开的ur-PK语言代码陷阱与ISO 639-3双标适配规范(仅限首批127家认证开发者知晓) ElevenLabs 官方文档中仅标注 ur 为乌尔…...

LLVM开发实战指南:从入门到精通编译器与程序分析
1. 项目概述:为什么你需要一份LLVM指南?如果你是一名C开发者,或者对编译器、程序分析、代码优化这些底层技术感兴趣,那么“LLVM”这个名字对你来说一定不陌生。它早已不是象牙塔里的学术玩具,而是驱动着从iOS、macOS到…...
)
【2026年阿里巴巴集团暑期实习- 5月16日-算法岗-第二题- 坏掉的键盘】(题目+思路+JavaC++Python解析+在线测试)
题目内容 小明准备输入一个仅由小写英文字母组成的字符串,但他的键盘在一开始就有且仅有一个按键失灵,导致该字母在原串中的所有出现都没有被输入,最终得到的字符串为 sss。小明还告诉你:原本要输入的完整字符串中任意相邻两个字符都不相同。 请你计算,对于每一个可能的…...

基于NestJS与Next.js的自托管电影管理应用Story Flicks部署与实战
1. 项目概述:一个为影迷打造的私人观影档案库 如果你和我一样,是个重度电影爱好者,那么你一定经历过这样的时刻:看完一部好片子,内心澎湃,想写点什么记录一下,却发现豆瓣、IMDb的评论区要么太嘈…...

Arm Neoverse-V2/V3缓存与内存参数优化指南
1. Arm Neoverse-V2/V3集群架构概述Arm Neoverse系列处理器作为数据中心和基础设施领域的重要计算引擎,其V2/V3代架构在缓存子系统和内存管理方面进行了显著优化。作为从业多年的系统架构师,我认为理解这些处理器的参数配置对性能调优至关重要。Neoverse…...

2026产品经理学数据分析对升职的价值
一、数据分析能力对产品经理升职的重要性数据分析能力已成为产品经理的核心竞争力之一。掌握数据分析技能可以帮助产品经理更精准地决策,提升产品成功率,从而在职业发展中占据优势。二、数据分析在产品经理工作中的具体应用通过数据分析优化产品功能迭代…...

VS Code Live Server完全指南:告别手动刷新,拥抱实时开发新时代
VS Code Live Server完全指南:告别手动刷新,拥抱实时开发新时代 【免费下载链接】vscode-live-server Launch a development local Server with live reload feature for static & dynamic pages. 项目地址: https://gitcode.com/gh_mirrors/vs/vs…...