嵌入式Linux应用开发-基础知识-第三章 LED原理图-GPIO及操作
嵌入式Linux应用开发-基础知识-第三章 LED原理图-GPIO及操作
- 第三章 硬件知识_LED 原理图
- 3.1 先来讲讲怎么看原理图
- 第四章 普适的 GPIO 引脚操作方法
- 4.1 GPIO 模块一般结构
- 4.2 GPIO 寄存器操作
- 4.3 GPIO 的其他功能:防抖动、中断、唤醒
- 第五章 具体单板的 GPIO 操作方法
- 5.1 AM335X 的 GPIO 操作方法
- 5.1.1 AM335X 的 GPIO 模块结构
- 5.1.2 AM335X 的 GPIO 相关寄存器
- 5.1.3 set-and-clear 协议
- 5.2 RK3288 的 GPIO 操作方法
- 5.2.1 RK3288 的 GPIO 模块结构
- 5.2.2 RK3288 的 GPIO 相关寄存器
- 5.3 RK3399 的 GPIO 操作方法
- 5.3.1 RK3399 的 GPIO 模块结构
- 5.3.2 RK3399 的 GPIO 相关寄存器
- 5.4 IMX6ULL 的 GPIO 操作方法
- 5.4.1 IMX6ULL 的 GPIO 模块结构
- 5.4.2 CCM 用于设置是否向 GPIO 模块提供时钟
- 5.4.3 IOMUXC:引脚的模式(Mode、功能)
- 5.4.4 GPIO 模块内部
- 5.4.5 读 GPIO
- 5.4.6 写 GPIO
第三章 硬件知识_LED 原理图
当我们学习 C 语言的时候,我们会写个 Hello 程序。
那当我们写 ARM 程序,也该有一个简单的程序引领我们入门,这个程序就是点亮 LED。
我们怎样去点亮一个 LED 呢?
分为三步:
1.看原理图,确定控制 LED 的引脚;
2.看主芯片的芯片手册,确定如何设置控制这个引脚;
3.写程序;
3.1 先来讲讲怎么看原理图
LED 样子有很多种,像插脚的,贴片的。

它们长得完全不一样,因此我们在原理图中将它抽象出来。
点亮 LED 需要通电源,同时为了保护 LED,加个电阻减小电流。
控制 LED 灯的亮灭,可以手动开关 LED,但在电子系统中,不可能让人来控制开关,通过编程,利用芯片的引脚去控制开关。
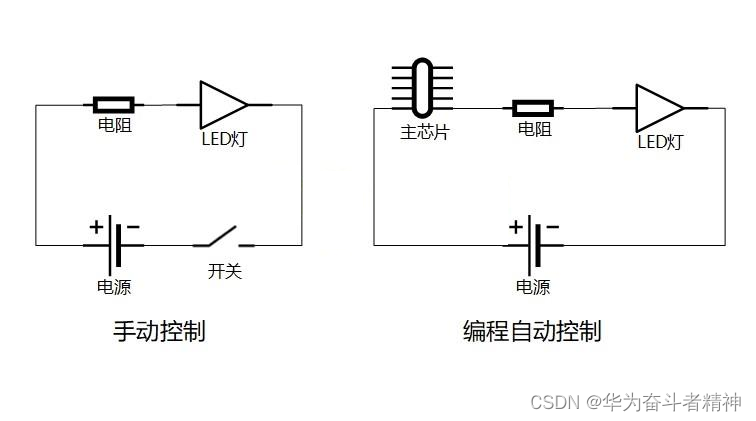
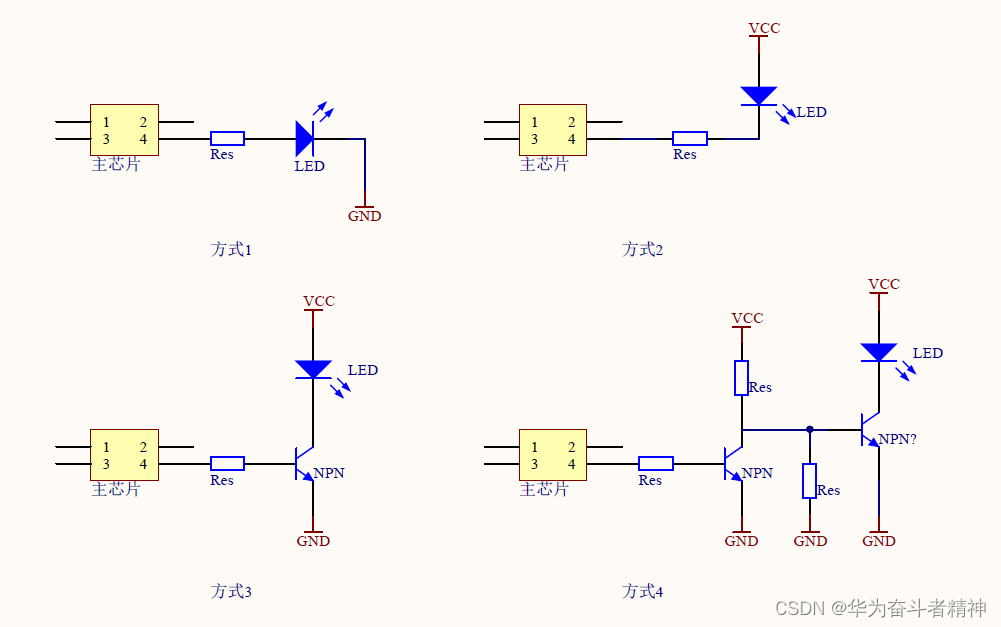
LED 的驱动方式,常见的有四种。
方式 1:使用引脚输出 3.3V 点亮 LED,输出 0V 熄灭 LED。
方式 2:使用引脚拉低到 0V 点亮 LED,输出 3.3V 熄灭 LED。
有的芯片为了省电等原因,其引脚驱动能力不足,这时可以使用三极管驱动。
方式 3:使用引脚输出 1.2V 点亮 LED,输出 0V 熄灭 LED。
方式 4:使用引脚输出 0V 点亮 LED,输出 1.2V 熄灭 LED。
由此,主芯片引脚输出高电平/低电平,即可改变 LED 状态,而无需关注 GPIO 引脚输出的是 3.3V 还是1.2V。
所以简称输出 1 或 0:
逻辑 1–>高电平
逻辑 0–>低电平
第四章 普适的 GPIO 引脚操作方法
GPIO: General-purpose input/output,通用的输入输出口
4.1 GPIO 模块一般结构
a. 有多组 GPIO,每组有多个 GPIO
b. 使能:电源/时钟
c. 模式(Mode):引脚可用于 GPIO 或其他功能
d. 方向:引脚 Mode 设置为 GPIO 时,可以继续设置它是输出引脚,还是输入引脚
e. 数值:对于输出引脚,可以设置寄存器让它输出高、低电平
对于输入引脚,可以读取寄存器得到引脚的当前电平
4.2 GPIO 寄存器操作
a. 芯片手册一般有相关章节,用来介绍:power/clock
可以设置对应寄存器使能某个 GPIO 模块(Module)
有些芯片的 GPIO 是没有使能开关的,即它总是使能的
b. 一个引脚可以用于 GPIO、串口、USB 或其他功能,
有对应的寄存器来选择引脚的功能
c. 对于已经设置为 GPIO 功能的引脚,有方向寄存器用来设置它的方向:输出、输入
d. 对于已经设置为 GPIO 功能的引脚,有数据寄存器用来写、读引脚电平状态
GPIO 寄存器的 2 种操作方法:
原则:不能影响到其他位
1) 直接读写:读出、修改对应位、写入
要设置 bit n:
val = data_reg;
val = val | (1<<n);
data_reg = val;
要清除 bit n:
val = data_reg;
val = val & ~(1<<n);
data_reg = val;
2) set-and-clear protocol:
set_reg, clr_reg, data_reg 三个寄存器对应的是同一个物理寄存器,
要设置 bit n:set_reg = (1<<n);
要清除 bit n:clr_reg = (1<<n);
4.3 GPIO 的其他功能:防抖动、中断、唤醒
后续章节再介绍
第五章 具体单板的 GPIO 操作方法
请使用 GIT 下载文档后,看下图红框所示目录中各板子对应的文档及图片。
网盘中相同名字的目录下也有对应的视频。
为方便学习,在本文档中也把上述 GIT 目录中的文档添加进来了。
5.1 AM335X 的 GPIO 操作方法
GPIO: General-purpose input/output,通用的输入输出口
PRCM: Power, Reset, and Clock Management (电源、复位、时钟管理器)
CM: Control Module(控制模块) 或 Clock Module (时钟模块)
PRM_PER: Power Reset Module Peripheral Registers(电源/复位模块中关于外设的寄存器)
CM_PER: Clock Module Peripheral Registers (时钟模块中关于外设的寄存器)
5.1.1 AM335X 的 GPIO 模块结构
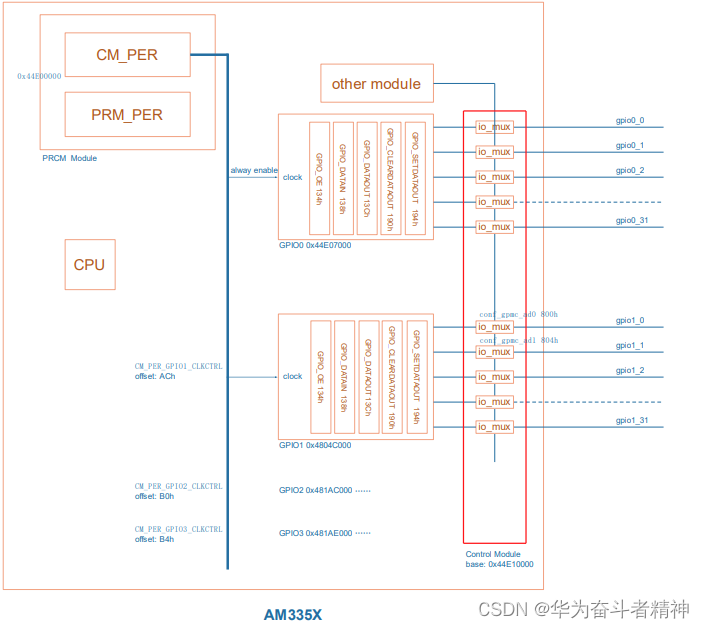
有 4 组 GPIO(GPIO0~3),每组有 32 个 GPIO。
GPIO 的控制涉及 3 大模块:PRCM、Control Module、GPIO 模块本身。
① PRCM 用于使能模块:
GPIO0 永远都是使能的,GPIO1~3 可单独控制。
PRCM 模块给 GPIO 模块常供电,只需要使能 GPIO 模块的时钟。
② Control Module 用于设置模式(Mode):
设置引脚的 Mode(即选择功能)、上下拉电阻等;
每一个 GPIO 引脚在 Control Module 中都有一个寄存器,怎么找到这个寄存器?
a. 根据 pin number 确定 pin name
b. 根据 pin name 在 Control Module 中确定寄存器
③ GPIO 模块内部:
方向:引脚 Mode 设置为 GPIO 时,可以继续设置它是输出引脚,还是输入引脚。
数值:对于输出引脚,可以设置寄存器让它输出高、低电平;
对于输入引脚,可以读取寄存器得到引脚的当前电平。
5.1.2 AM335X 的 GPIO 相关寄存器

5.1.3 set-and-clear 协议
假设某个 GPIO 被设置为输出,怎么设置它的输出电平呢?AM335X 中对于每个 GPIO 模块有一个
GPIO_DATAOUT 寄存器,其中的每一位对应一个引脚,如下:
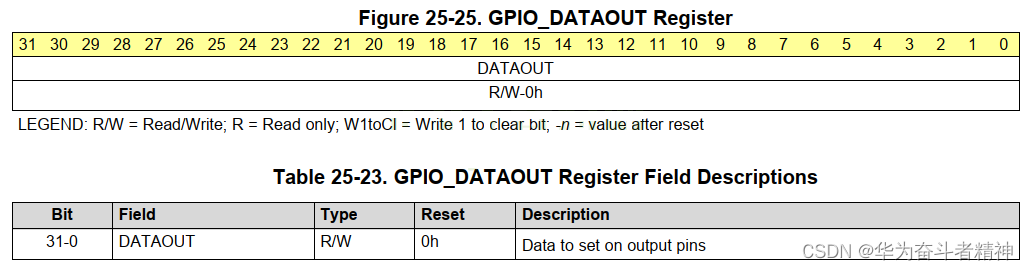
要设置某一位时,不能影响到其他位,操作方法是:读出原来的值,修改某一位,把新值写回去。需要3 个步骤才可以设置某一位的值,这效率太低了!
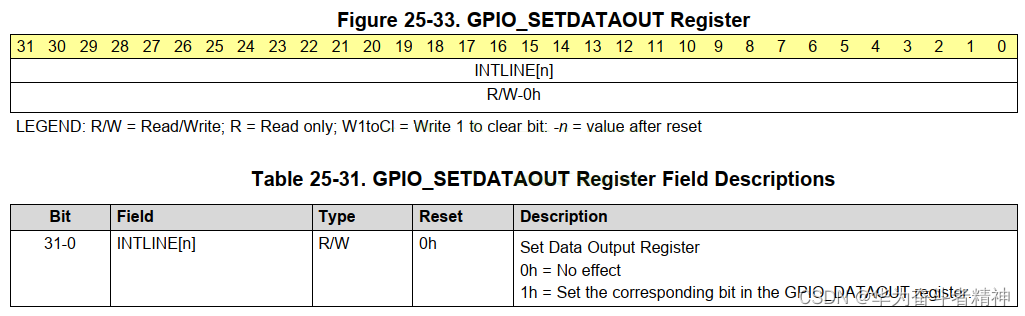
使用 set-and-clear 可以只用一个步骤即可修改某一位的值。
当想设置某一位为 1 时,往 DATA_SETDATAOUT 寄存器中某位写入 1 即可,芯片内部会把对应引脚的电平设置为 1,并且不会影响其他引脚:
并非所有的芯片都有 set-and-clear 功能,TI 的 AM335X 系列芯片有这功能。
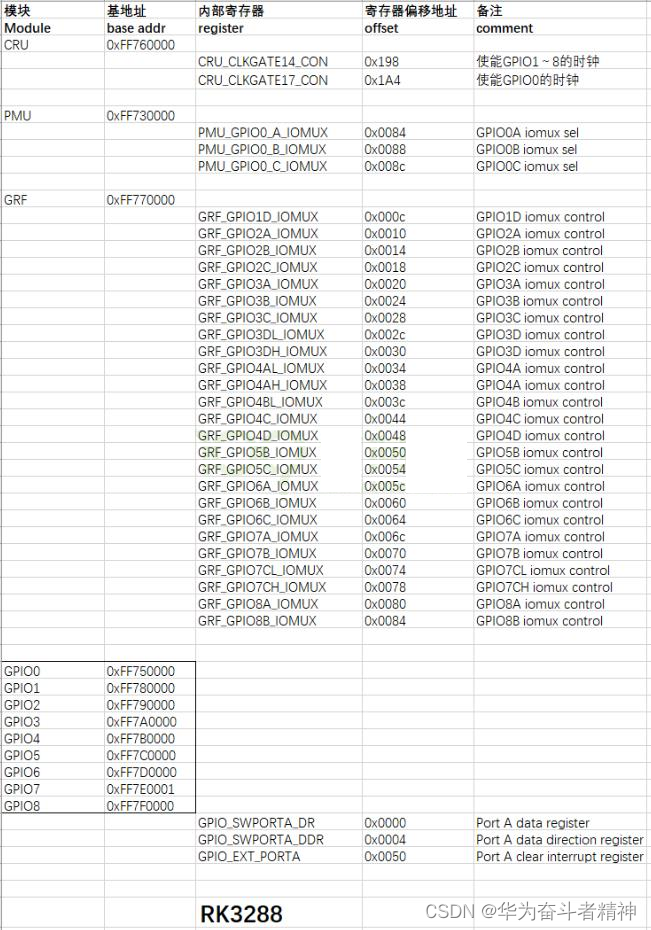
5.2 RK3288 的 GPIO 操作方法
GPIO: General-purpose input/output,通用的输入输出口
CRU: Clock & Reset Unit (时钟和复位单元)
PMU: Power Managerment Unit (电源管理单元)
GRF: General Register Files (通用寄存器文件)
5.2.1 RK3288 的 GPIO 模块结构
有 9 组 GPIO(GPIO0~8),每组分为最多 4 个小组 port A/B/C/D,每小组最多 8 个 GPIO。理论上每组GPIO 的引脚有 32 个,但是实际上并没有那么多。比如 GPIO0 只有 GPIO0_A0~A7、GPIO0_B0~B7、GPIO0_C0~C2 这些引脚。
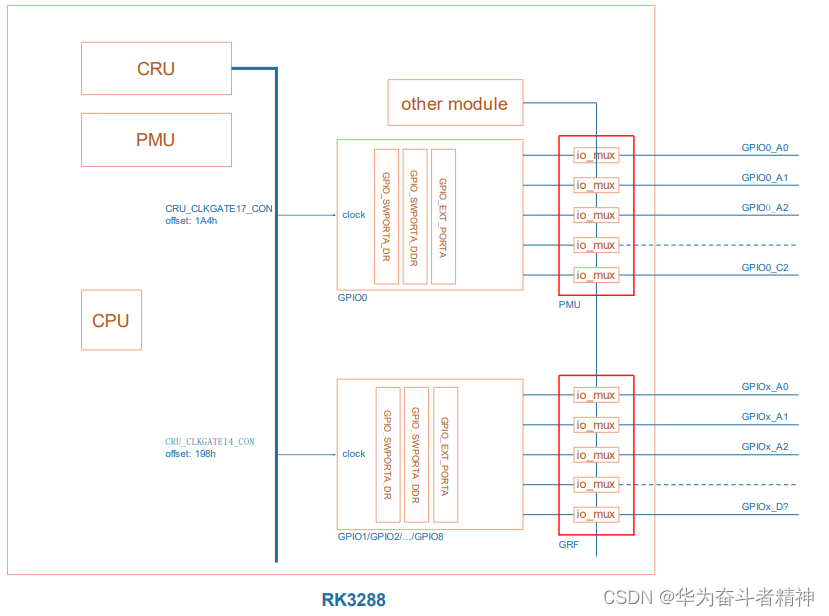
GPIO 的控制涉及 4 大模块:CRU、PMU、GRF、GPIO 模块本身。
① CRU 用于设置是否向 GPIO 模块提供时钟:
CRU 的内部结构如下图所示:
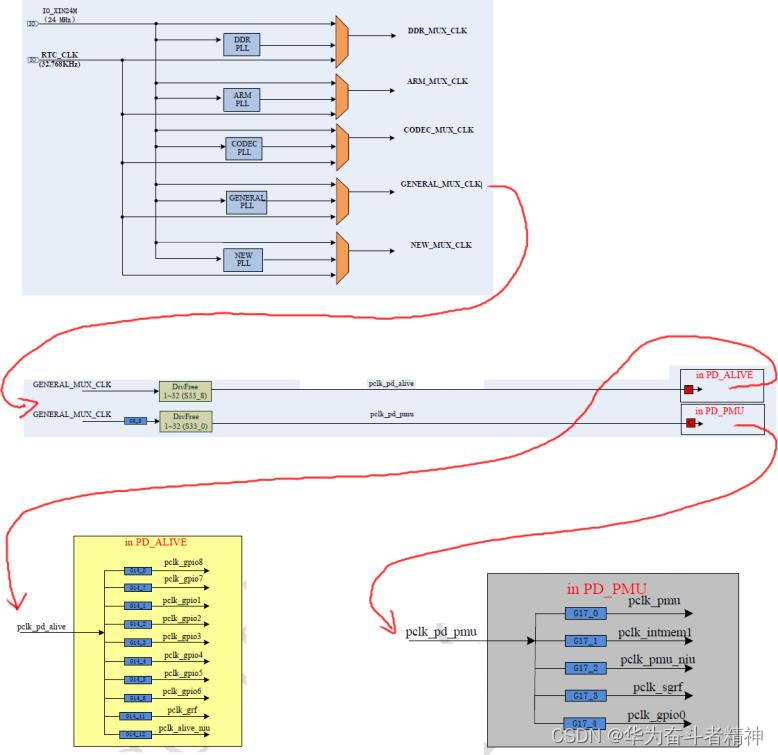
可以设置寄存器使能 GPIOx 的时钟:
a. CRU_CLKGATE17_CON 用于控制 GPIO0;
b. CRU_CLKGATE14_CON 用于控制 GPIO1~8
② PMU 用于控制电源:
电源管理单元里,有多个电源域(power domain,简称为 PM),在一个域下有多个设备。
比如 PD_ALIVE,它下面有这些设备:CRU、GRF、GPIO 1~8、TIMER 或 WDT。
比如 PD_PMU,它下面有这些设备:PMU、SRAM(4K)、Secure GRF、GPIO0。
可见,GPIO0、GPIO1~8 分属不同的 PM。
GPIO0、GPIO1~8 都是常供电的,它们是否工作取决于其时钟是否使能。
③ 设置引脚的模式(Mode、功能):
GPIO0 比较特殊,为了让其引脚用于 GPIO 功能,要设置 PMU 里的相关寄存器。
GPIO1~8 类似,为了让其引脚用于 GPIO 功能,要设置 GRF 里的相关寄存器。
④ GPIO 模块内部:
方向:引脚设置为 GPIO 时,可以继续设置寄存器 GPIO_SWPORTA_DDR 确定它是输出引脚,还是输入引脚。
数值:对于输出引脚,可以设置寄存器 GPIO_SWPORTA_DR 让它输出高、低电平;
对于输入引脚,可以读取寄存器 GPIO_EXT_PORTA 得到引脚的当前电平。
5.2.2 RK3288 的 GPIO 相关寄存器
5.3 RK3399 的 GPIO 操作方法
GPIO: General-purpose input/output,通用的输入输出口
CRU: Clock & Reset Unit (时钟和复位单元)
PMU: Power Managerment Unit (电源管理单元)
GRF: General Register Files (通用寄存器文件)
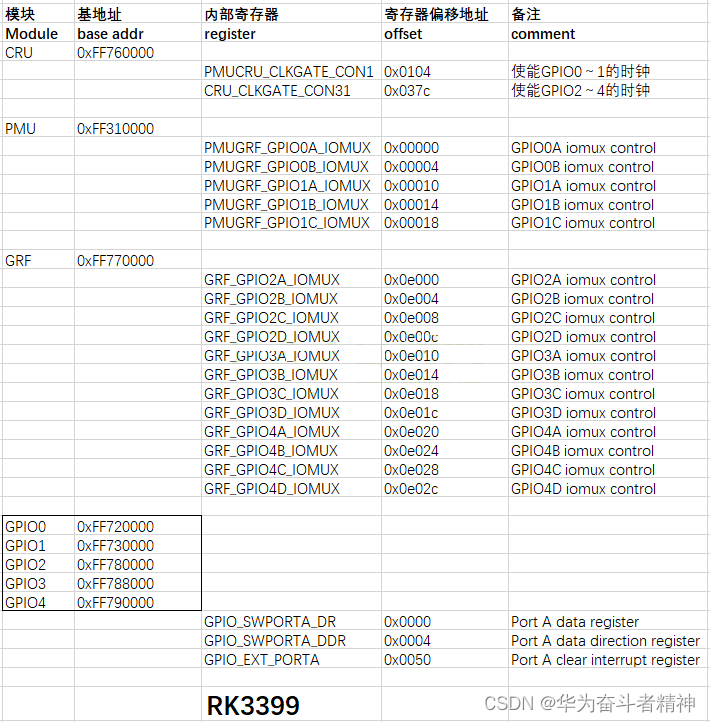
5.3.1 RK3399 的 GPIO 模块结构
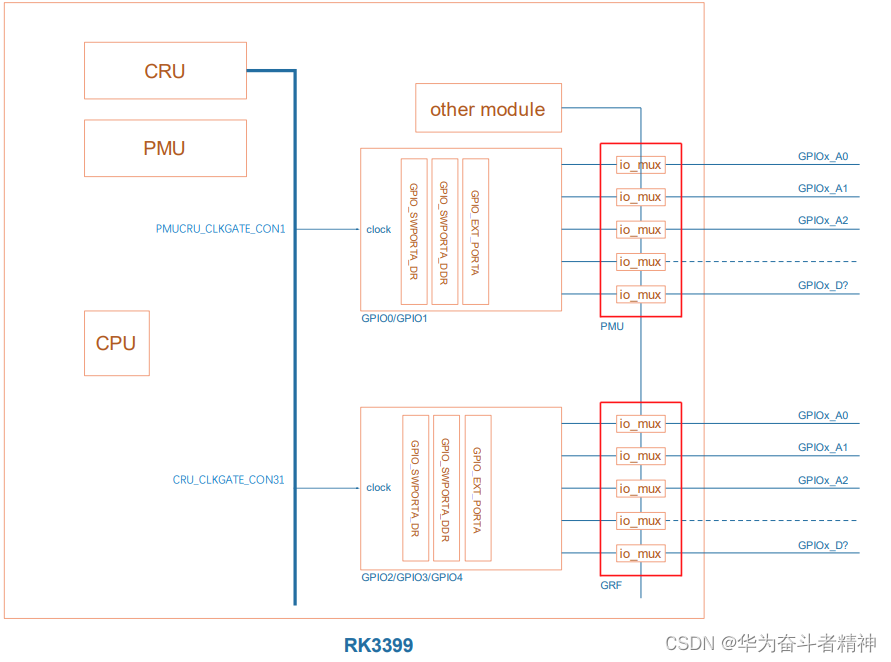
有 5 组 GPIO(GPIO0~4),每组分为最多 4 个小组 port A/B/C/D,每小组最多 8 个 GPIO。理论上每组 GPIO 的引脚有 32 个,但是实际上并没有那么多。比如 GPIO0 只有 GPIO0_A0~A7、GPIO0_B0~B5 这些引脚。
① CRU 用于设置是否向 GPIO 模块提供时钟
a. PMUCRU_CLKGATE_CON1 用于控制 GPIO0~1;
b. CRU_CLKGATE_CON31 用于控制 GPIO2~4
② PMU 用于控制电源:
电源管理单元里,有多个电源域(power domain,简称为 PM),在一个域下有多个设备。
比如 PD_ALIVE,它下面有这些设备:CRU、GRF、GPIO 1~4、TIMER 或 WDT。
比如 PD_PMU,它下面有这些设备:cm0、PMU、SRAM(8K)、Secure GRF、GPIO0、PVTM、I2C。
可见,GPIO0、GPIO1~4 分属不同的 PM。
GPIO0、GPIO1~4 都是常供电的。
③ 设置引脚的模式(Mode、功能):
GPIO0~1 比较特殊,为了让其引脚用于 GPIO 功能,要设置 PMU 里的相关寄存器。
GPIO2~4 类似,为了让其引脚用于 GPIO 功能,要设置 GRF 里的相关寄存器。
④ GPIO 模块内部:
方向:引脚设置为 GPIO 时,可以继续设置寄存器 GPIO_SWPORTA_DDR 确定它是输出引脚,还是输入引脚。
数值:对于输出引脚,可以设置寄存器 GPIO_SWPORTA_DR 让它输出高、低电平;
对于输入引脚,可以读取寄存器 GPIO_EXT_PORTA 得到引脚的当前电平。
5.3.2 RK3399 的 GPIO 相关寄存器
5.4 IMX6ULL 的 GPIO 操作方法
CCM: Clock Controller Module (时钟控制模块)
IOMUXC : IOMUX Controller,IO 复用控制器
GPIO: General-purpose input/output,通用的输入输出口
5.4.1 IMX6ULL 的 GPIO 模块结构
参考资料:芯片手册《Chapter 28: General Purpose Input/Output (GPIO)》
有 5 组 GPIO(GPIO1~GPIO5),每组引脚最多有 32 个,但是可能实际上并没有那么多。
GPIO1 有 32 个引脚:GPIO1_IO0~GPIO1_IO31;
GPIO2 有 22 个引脚:GPIO2_IO0~GPIO2_IO21;
GPIO3 有 29 个引脚:GPIO3_IO0~GPIO3_IO28;
GPIO4 有 29 个引脚:GPIO4_IO0~GPIO4_IO28;
GPIO5 有 12 个引脚:GPIO5_IO0~GPIO5_IO11;
GPIO 的控制涉及 4 大模块:CCM、IOMUXC、GPIO 模块本身,框图如下:
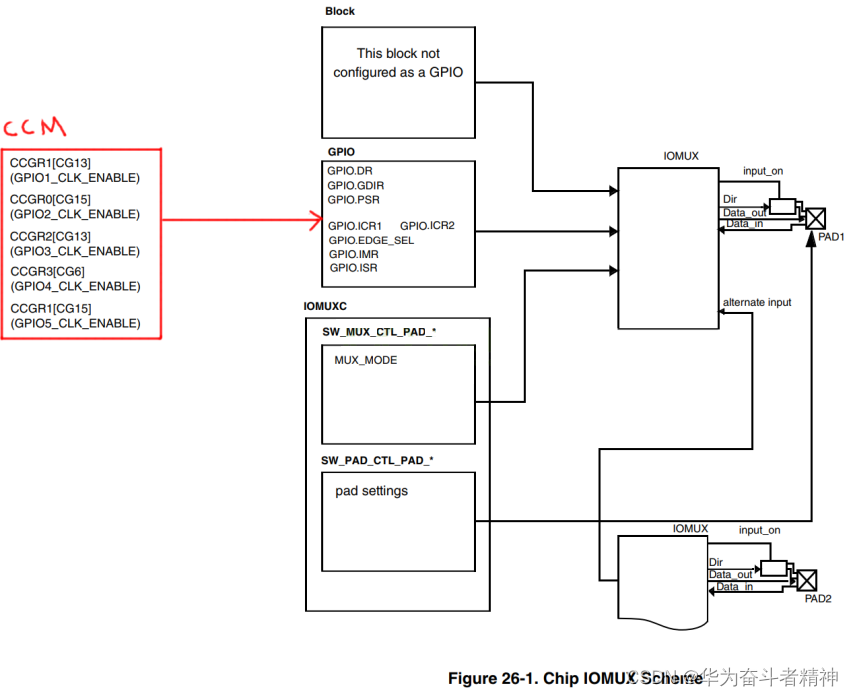
5.4.2 CCM 用于设置是否向 GPIO 模块提供时钟
参考资料:芯片手册《Chapter 18: Clock Controller Module (CCM)》
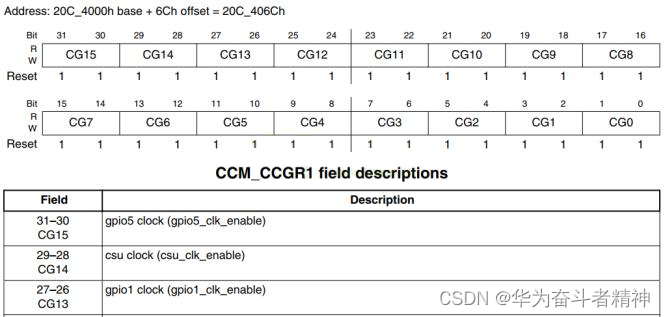
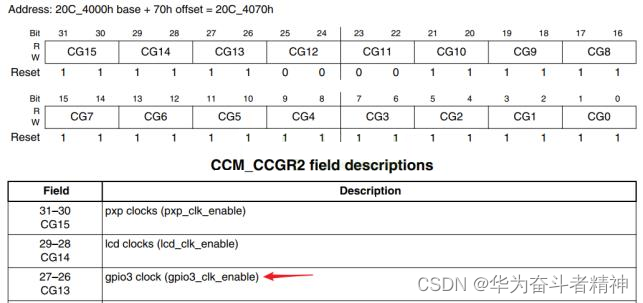
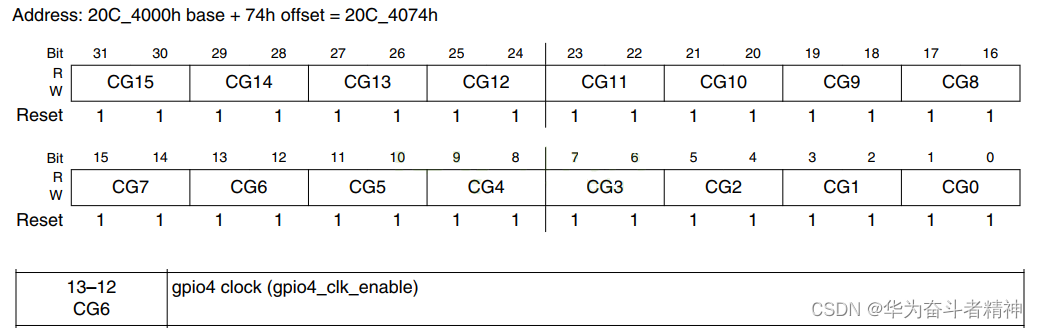
GPIOx 要用 CCM_CCGRy 寄存器中的 2 位来决定该组 GPIO 是否使能。哪组 GPIO 用哪个 CCM_CCGR 寄存器来设置,请看上图红框部分。
CCM_CCGR 寄存器中某 2 位的取值含义如下:

① 00:该 GPIO 模块全程被关闭
② 01:该 GPIO 模块在 CPU run mode 情况下是使能的;在 WAIT 或 STOP 模式下,关闭
③ 10:保留
④ 11:该 GPIO 模块全程使能
GPIO2 时钟控制:
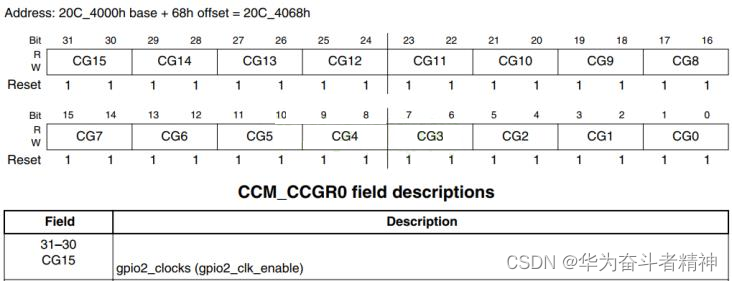
GPIO1、GPIO5 时钟控制:
GPIO3 时钟控制:
GPIO4 时钟控制:
5.4.3 IOMUXC:引脚的模式(Mode、功能)
参考资料:芯片手册《Chapter 32: IOMUX Controller (IOMUXC)》。
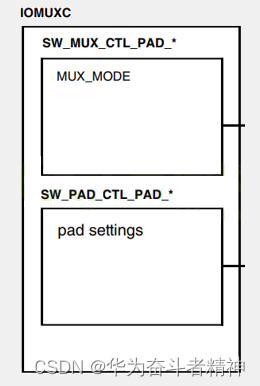
对于某个/某组引脚,IOMUXC 中有 2 个寄存器用来设置它:
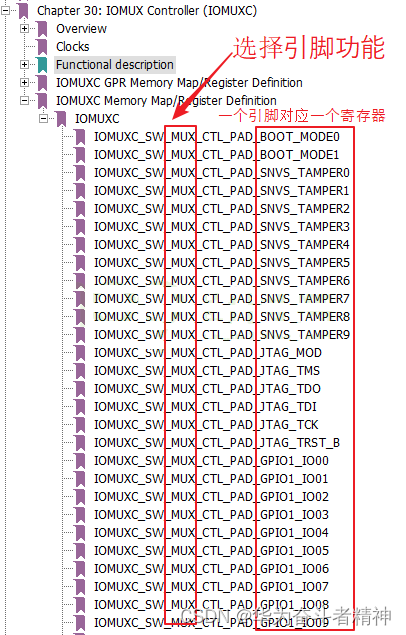
① 选择功能:
IOMUXC_SW_MUX_CTL_PAD_ :Mux pad xxx,选择某个 pad 的功能
IOMUXC_SW_MUX_CTL_GRP_:Mux grp xxx,选择某组引脚的功能
某个引脚,或是某组预设的引脚,都有 8 个可选的模式(alternate (ALT) MUX_MODE)。
比如:
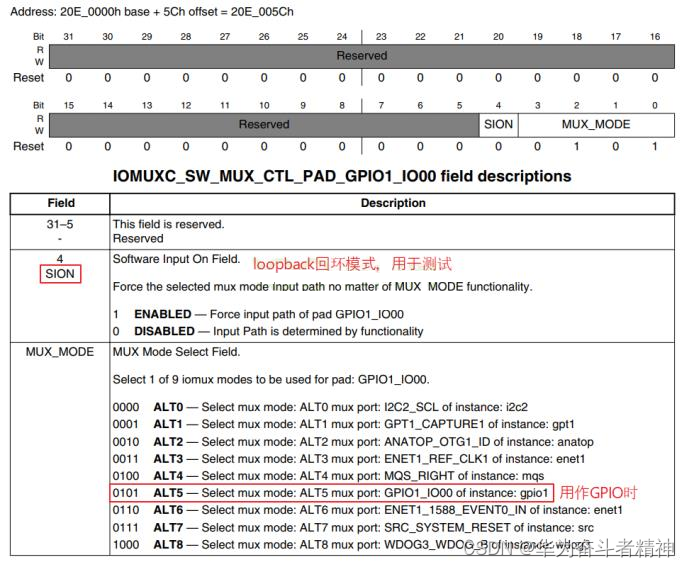
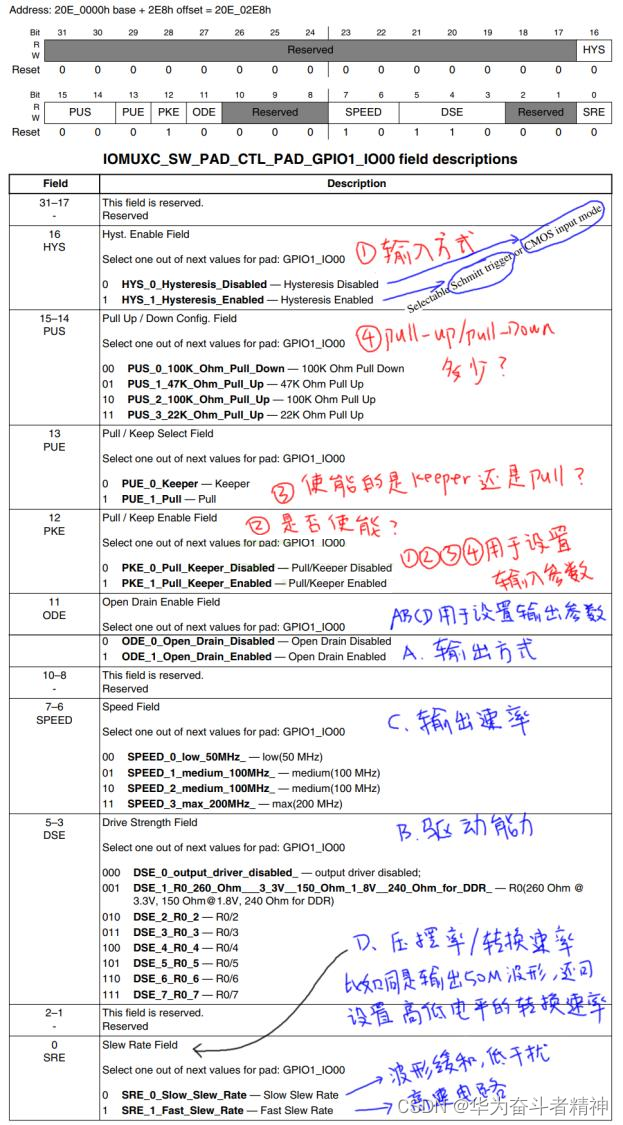
② 设置上下拉电阻等参数:
IOMUXC_SW_PAD_CTL_PAD_<PAD_NAME>:pad pad xxx,设置某个 pad 的参数
IOMUXC_SW_PAD_CTL_GRP_:pad grp xxx,设置某组引脚的参数
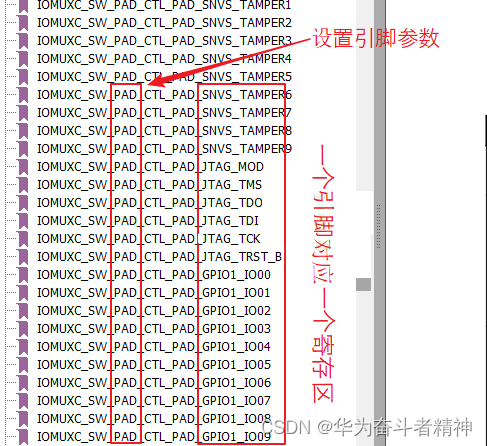
比如:
5.4.4 GPIO 模块内部
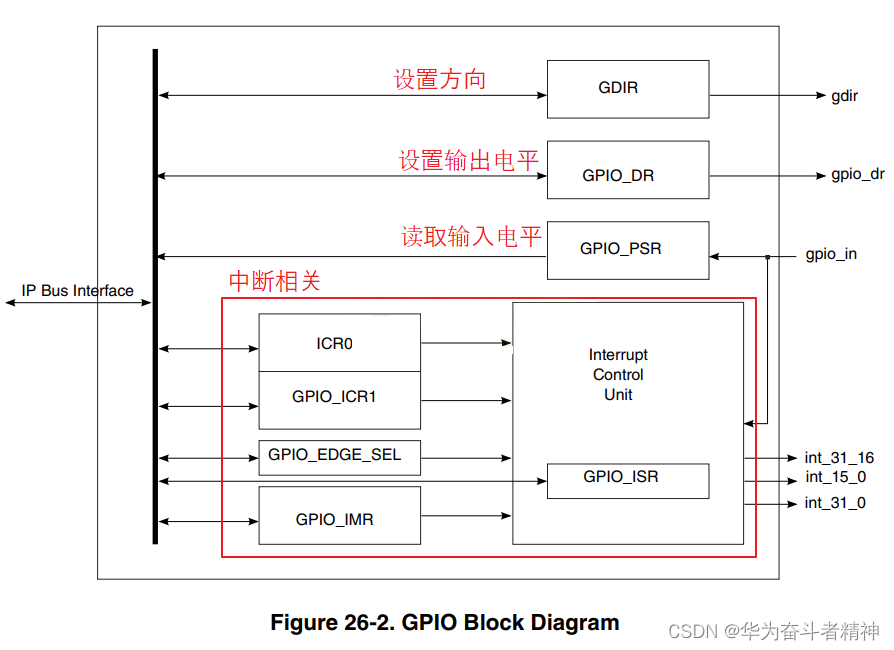
我们暂时只需要关心 3 个寄存器:
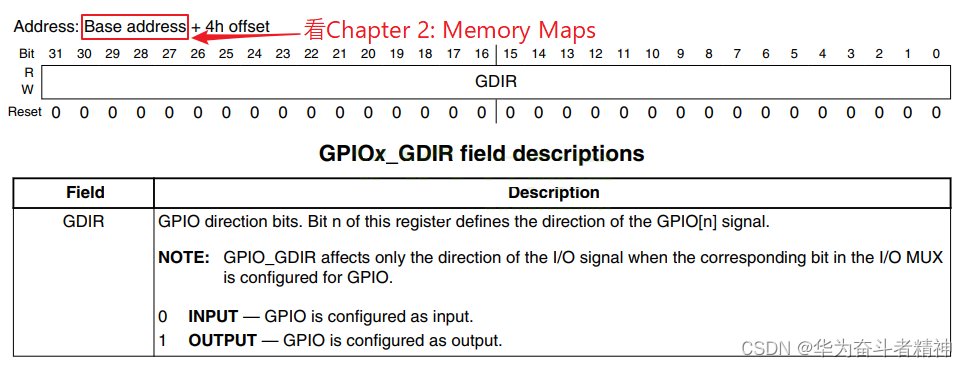
① GPIOx_GDIR:设置引脚方向,每位对应一个引脚,1-output,0-input
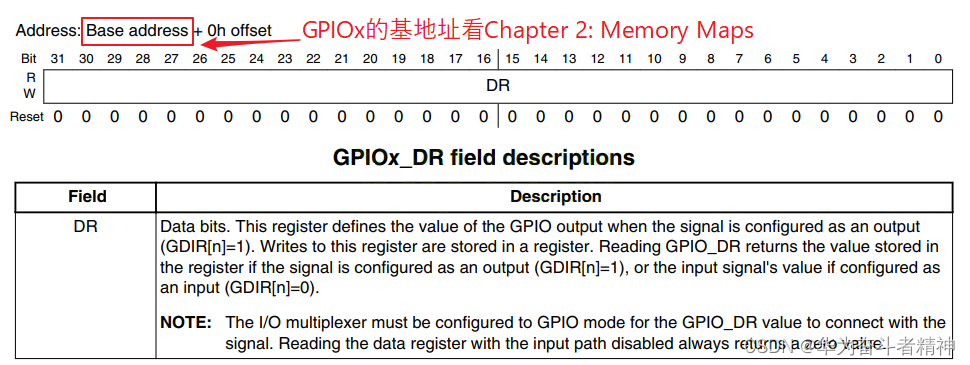
② GPIOx_DR:设置输出引脚的电平,每位对应一个引脚,1-高电平,0-低电平
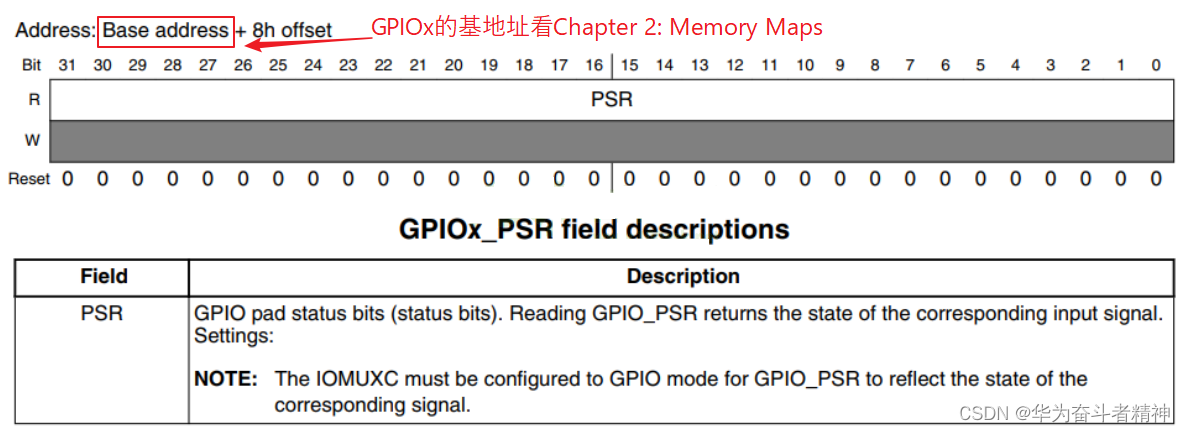
③ GPIOx_PSR:读取引脚的电平,每位对应一个引脚,1-高电平,0-低电平
5.4.5 读 GPIO
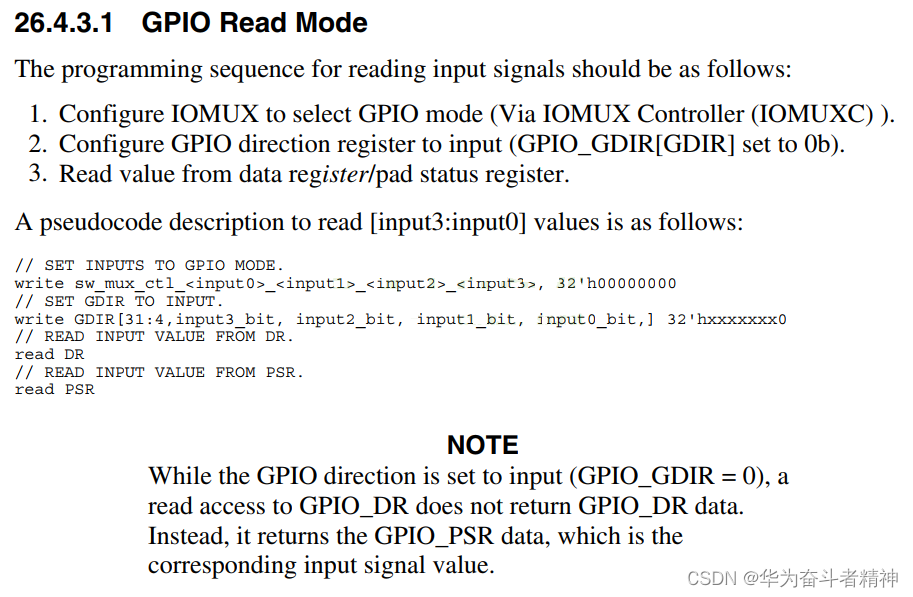
翻译一下:
① 设置 CCM_CCGRx 寄存器中某位使能对应的 GPIO 模块 // 默认是使能的,上图省略了
② 设置 IOMUX 来选择引脚用于 GPIO
③ 设置 GPIOx_GDIR 中某位为 0,把该引脚设置为输入功能
④ 读 GPIOx_DR 或 GPIOx_PSR 得到某位的值(读 GPIOx_DR 返回的是 GPIOx_PSR 的值)
5.4.6 写 GPIO
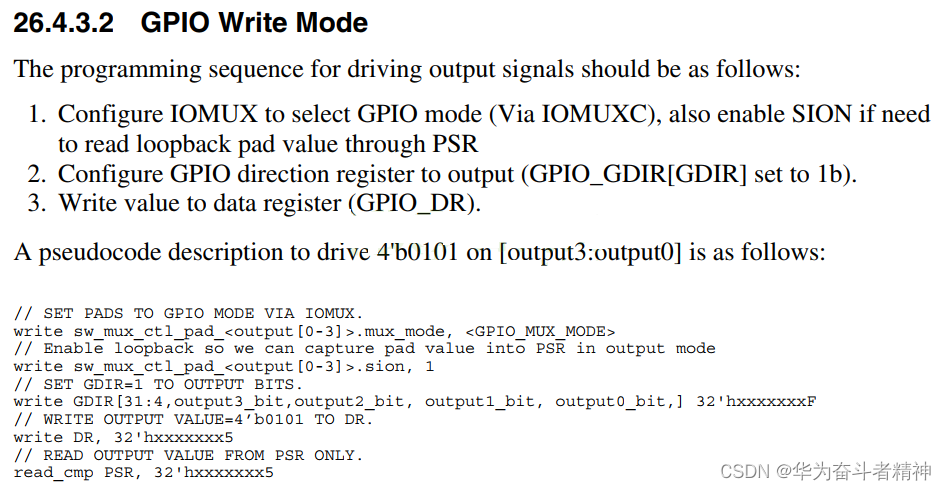
翻译一下:
① 设置 CCM_CCGRx 寄存器中某位使能对应的 GPIO 模块 // 默认是使能的,上图省略了
② 设置 IOMUX 来选择引脚用于 GPIO
③ 设置 GPIOx_GDIR 中某位为 1,把该引脚设置为输出功能
④ 写 GPIOx_DR 某位的值
需要注意的是,你可以设置该引脚的 loopback 功能,这样就可以从 GPIOx_PSR 中读到引脚的有实
电平;你从 GPIOx_DR 中读回的只是上次设置的值,它并不能反应引脚的真实电平,比如可能因为硬件故障导致该引脚跟地短路了,你通过设置 GPIOx_DR 让它输出高电平并不会起效果。
相关文章:
嵌入式Linux应用开发-基础知识-第三章 LED原理图-GPIO及操作
嵌入式Linux应用开发-基础知识-第三章 LED原理图-GPIO及操作 第三章 硬件知识_LED 原理图3.1 先来讲讲怎么看原理图 第四章 普适的 GPIO 引脚操作方法4.1 GPIO 模块一般结构4.2 GPIO 寄存器操作4.3 GPIO 的其他功能:防抖动、中断、唤醒 第五章 具体单板的 GPIO 操作…...
外贸人员如何选择适合的邮箱服务
随着互联网和数字技术的快速发展,电子邮件已经成为商务沟通的主要方式之一。对于外贸人员来说,选择一个合适且高效的邮箱服务至关重要。本文将探讨外贸人员在选择外贸邮箱时应考虑的因素,以便找到最适合自己的解决方案。 “外贸人员如何选择合…...

pt29django教程
文件上传 文件上传必须为POST提交方式, 表单<form>中文件上传时必须有带有enctype"multipart/form-data" 时才会包含文件内容数据。 表单中用<input type"file" name"xxx">标签上传文件 名字xxx对应request.FILES[xx…...
【操作系统笔记七】进程和线程
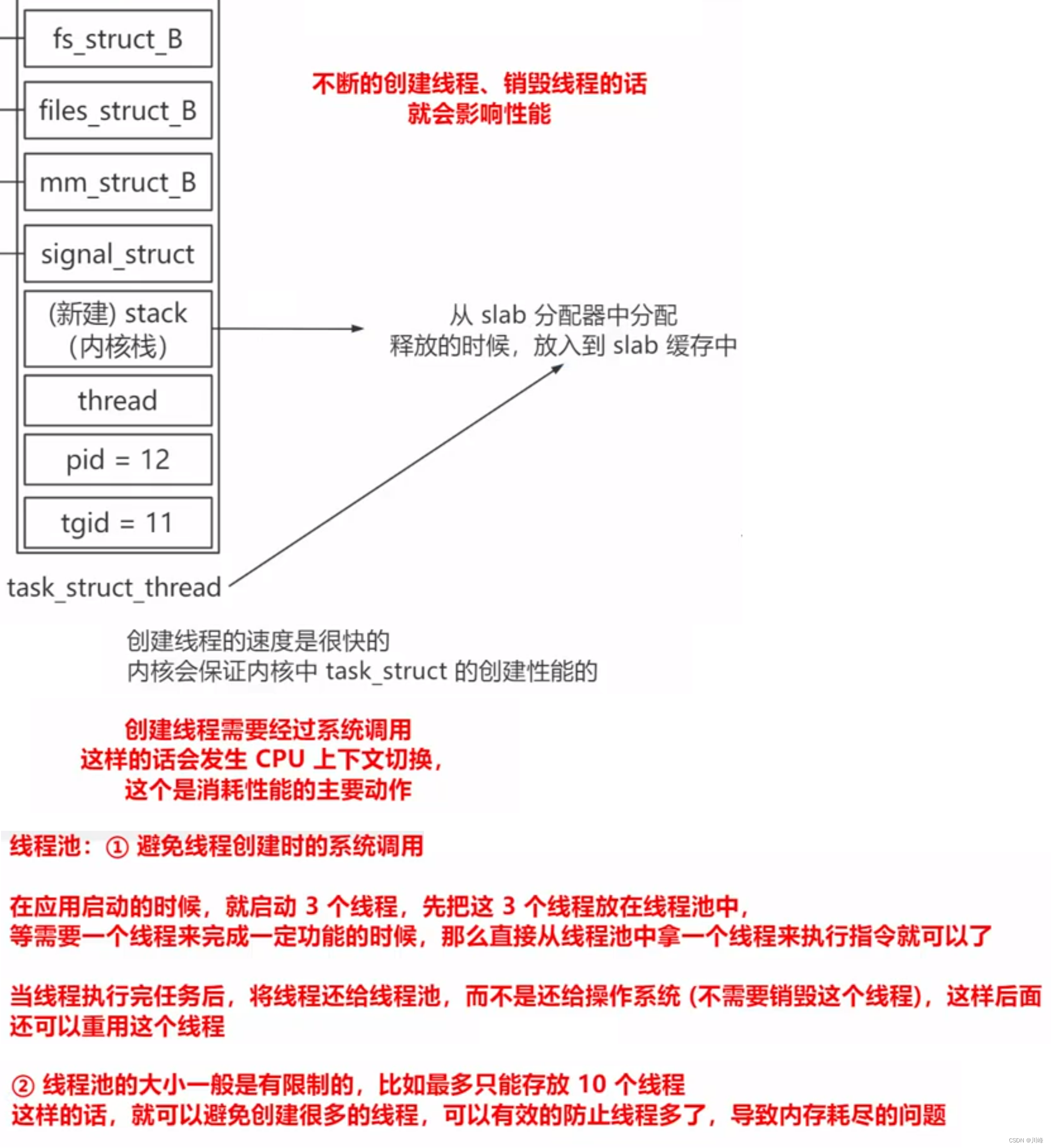
进程的组成 进程要读取 ELF 文件,那么: ① 要知道文件系统的信息,fs_struct② 要知道打开的文件的信息,files_struct 一个进程除了需要读取 ELF 文件外,还可以读取其他的文件中的数据。 进程中肯定有一个 mm_struct…...
Kakfa高效读写数据
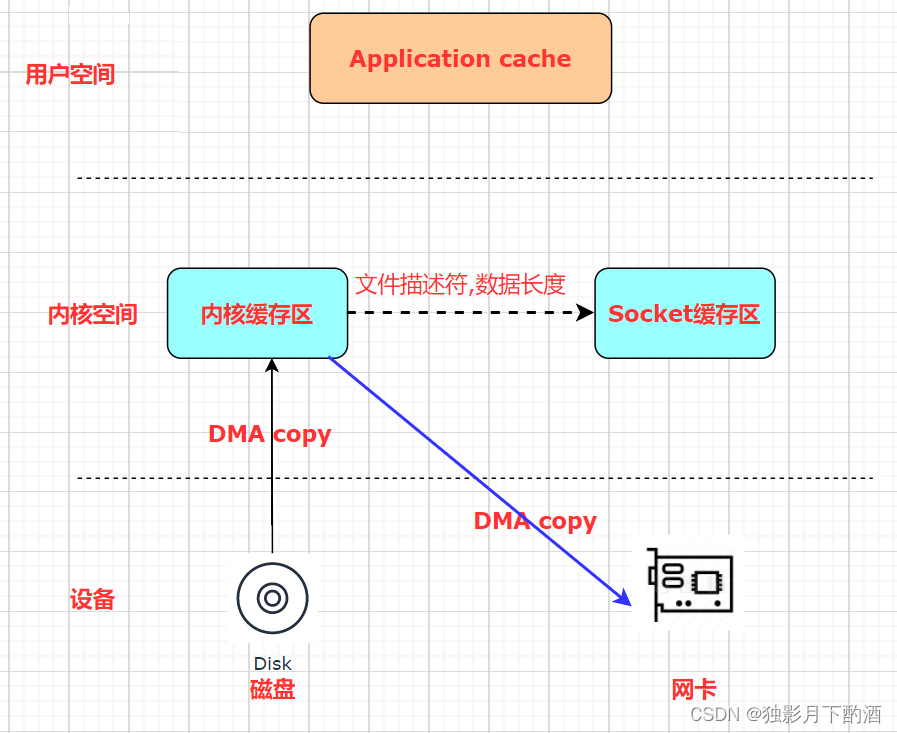
1.概述 无论 kafka 作为 MQ 也好,作为存储层也罢,无非就是两个功能:一是 Producer 生产的数据存到 broker,二是 Consumer 从 broker 读取数据。那 Kafka 的快也就体现在读写两个方面了,本文也是从这两个方面去剖析Kafk…...
构造函数)
C++ 类和对象(4)构造函数
C的目标之一是让使用类对象就像使用标准类型一样,但是常规的初始化语法不适用于类似类型Stock: int year 2001; struct thing {char * pn;int m; }; thing amabob {"wodget",-23}; //有效初始化 Stock hot {"Sukies Autos…...
)
数据结构————广度寻路算法 Breadth First Search(广度优先算法)
(一)基础补充 二叉树的基本定义 1)二叉树就是度不超过2的树,其每个结点最多有两个子结点 2)二叉树的结点分为左结点和右结点 代码实现二叉树 #include <stdio.h> #include <stdlib.h> struct Node {int data;struct Node* pLeft;struct Node* pRight; }…...

安卓桌面记事本便签软件哪个好用?
日常生活及工作中,很多人常常会遇到一些一闪而现的灵感,这时候拿出手机想要记录时,却找不到记录的软件。在这个快节奏的时代,安卓手机是我们日常生活不可或缺的伙伴。然而,正因为我们的生活如此忙碌,记事变…...

河北吉力宝以步力宝健康鞋引发的全新生活生态商
在当今瞬息万变的商业世界中,成功企业通常都是那些不拘泥于传统、勇于创新的先锋之选。河北吉力宝正是这样一家企业,通过打造一双步力宝健康鞋,他们以功能性智能科技穿戴品为核心,成功创造了一种结合智能康养与时尚潮流的独特产品…...

反射获取Constructor、Field、Method对象
1、获取构造器 Constructor [ ] getConstructor s ( ) 获取全部的构造器:只能获取 public 修饰的构造器 package com.csdn.pojo; import lombok.AllArgsConstructor; import lombok.Data; import lombok.NoArgsConstructor; import org.junit.Test; import jav…...

【Netty】 ByteBuf的常用API总结
目录 一、ByteBuf介绍 二、ByteBuf创建 1.池化创建 ByteBufAllocator 2.Unpooled (非池化)创建ByteBuf 3.ByteBufUtil 操作ByteBuf 三、读取ByteBuf数据 1.get方法 2.read方法 3.set方法 4.write方法 5.索引管理 6.索引查找 7.索引查找 8.其…...

热门敏捷开发管理工具
敏捷管理研发工具可以协助团队更好地进行敏捷开发和管理。以下是几种流行的敏捷管理研发工具: Leangoo:Leangoo领歌一款永久免费的专业敏捷研发管理工具,它覆盖了敏捷项目研发全流程,包括小型团队敏捷开发,规模化敏捷…...

Java分支结构:一次不经意的选择,改变了我的一生。
👑专栏内容:Java⛪个人主页:子夜的星的主页💕座右铭:前路未远,步履不停 目录 一、顺序结构二、分支结构1、if语句2、switch语句 好久不见!命运之轮常常在不经意间转动,有时一个看似微…...
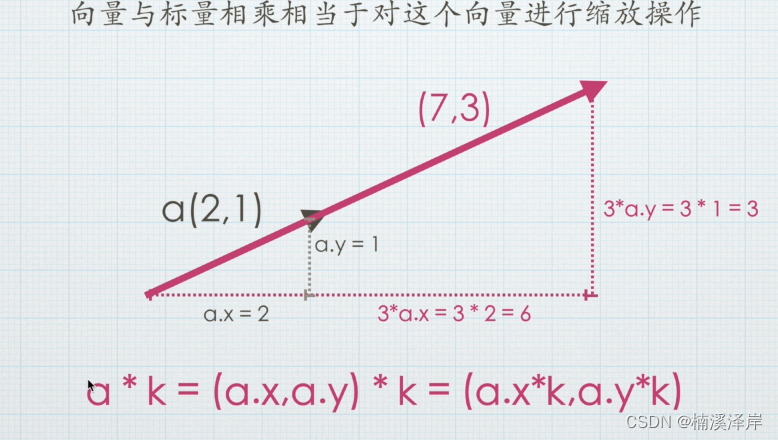
Unity中Shader需要了解的点与向量
文章目录 前言一、点和向量的区别二、向量加法减法1、向量加法2、向量减法(可以把向量减法转化为向量加法) 三、向量的模四、标量1、向量与标量的乘法 前言 Unity中Shader了解使用的…...
)
Java初始化大量数据到Neo4j中(一)
背景:我们项目第一次部署图数据库,要求我们把现有的业务数据以及关系上线第一时间初始化到Neo4j中。开发环境数据量已经百万级别。生成环境数据量更多。 我刚开始开发的时候,由于对Neo4j的了解并没有很多,第一想到的是用代码通用组…...

Excel·VBA日期时间转换提取正则表达式函数
标准日期转换 Function 标准日期(ByVal str$) As DateDim pat$, result$arr Array("(\d{4}).*?(\d{1,2}).*?(\d{1,2})", "(\d{4}).*?(\d{1}).*?(\d{1,2})")If Len(str) < 8 Then pat arr(1) Else pat arr(0)With CreateObject("vbscript.r…...
Django中的缓存
Django中的缓存 缓存的定义 定义: 缓存是-类可以更快的读取数据的介质统称,也指其它可以加快数据读取的存储方式。一般用来存储临时数据,常用介质的是读取速度很快的内存 意义:视图渲染有一定成本,数据库的频繁查询过高;所以对于低频变动的页…...

Python 编程基础 | 第二章-基础语法 | 2.4、while 语句
一、while 语句 1、循环语句 Python 编程中 while 语句用于循环执行程序,其基本形式为: while 判断条件(condition):执行语句(statements)……例如: count 0 while (count < 9):print(count)count 1while 语句时还有另外两个…...

Qt Charts简介
文章目录 一.图标类型Charts分类1.折线图和样条曲线图2.面积图和散点图3.条形图4.饼图5.误差棒图6.烛台图7.极坐标图 二.坐标轴Axes类型分类三.图例四.图表的互动五.图表样式主题 一.图标类型Charts分类 图表是通过使用系列类的实例并将其添加到QChart或ChartView实例来创建的…...

MinGW、GCC、GNU和MSVC是什么?有什么区别?
在C和C开发中,常常会遇到MinGW、GCC、GNU和MSVC这些术语。本教程将向您解释它们的含义以及它们之间的区别,帮助您更好地理解这些常见的编译工具和开发环境。 MinGW(Minimalist GNU for Windows): MinGW是一个开源的软件…...

如何用LDBlockShow高效绘制连锁不平衡热图:从入门到精通的完整指南
如何用LDBlockShow高效绘制连锁不平衡热图:从入门到精通的完整指南 【免费下载链接】LDBlockShow LDBlockShow: a fast and convenient tool for visualizing linkage disequilibrium and haplotype blocks based on VCF files 项目地址: https://gitcode.com/gh_…...

STM32L4 RTC唤醒中断实战:用CubeIDE配置30秒低功耗定时,实测两种模式差异
STM32L4 RTC唤醒中断实战:用CubeIDE配置30秒低功耗定时,实测两种模式差异 在电池供电的嵌入式设备开发中,精准的周期性任务调度与极致的功耗控制往往是一对需要权衡的技术矛盾。STM32L4系列凭借其出色的低功耗特性与灵活的RTC模块,…...

从微服务架构设计到团队OKR:聊聊工程师日常中的‘帕累托最优’实践
从微服务架构设计到团队OKR:工程师日常中的‘帕累托最优’实践 在技术团队的实际工作中,我们常常面临各种权衡取舍:微服务拆分时如何平衡模块独立性与系统整体性能?制定OKR时怎样兼顾个人成长与团队目标?这些看似复杂的…...

从测试到实战:用hashcat -b命令摸清你的显卡性能,优化破解速度
从测试到实战:用hashcat -b命令摸清你的显卡性能,优化破解速度 当你第一次在命令行中输入hashcat -b并按下回车时,屏幕上跳动的数字不仅仅是枯燥的基准测试结果——它们是你硬件潜力的密码。对于中级安全研究人员和密码学爱好者来说ÿ…...

实现Degrees of Lewdity游戏本地化:完整中文补丁安装教程
实现Degrees of Lewdity游戏本地化:完整中文补丁安装教程 本教程将指导您完成Degrees of Lewdity游戏的中文本地化过程,通过系统的游戏本地化方法,帮助您顺利安装中文补丁,解决游戏界面语言障碍,提升游戏体验。我们将…...

AI Agent沙箱环境部署指南:从Docker容器化到生产级运维
1. 项目概述:构建一个生产级的AI Agent沙箱环境最近在折腾一个挺有意思的项目,叫NemoClaw OpenClaw Sandbox。简单来说,它是一套完整的、开箱即用的部署方案,能帮你在自己的云服务器(VPS)上,快速…...

3种方法快速激活Beyond Compare 5:完整密钥生成实战指南
3种方法快速激活Beyond Compare 5:完整密钥生成实战指南 【免费下载链接】BCompare_Keygen Keygen for BCompare 5 项目地址: https://gitcode.com/gh_mirrors/bc/BCompare_Keygen Beyond Compare 5是一款功能强大的专业文件对比工具,但30天评估期…...
的5个实战骚操作,让你的代码更灵活)
别再只会用点号了!Python里getattr()的5个实战骚操作,让你的代码更灵活
别再只会用点号了!Python里getattr()的5个实战骚操作,让你的代码更灵活 在Python开发中,我们经常需要动态地访问对象的属性和方法。虽然直接使用点号(.)是最常见的做法,但在某些场景下,getattr()函数能带来更灵活、更优…...
Realme Q3 5G刷Pixel Experience GSI保姆级教程(附问题修复与救砖指南)
Realme Q3 5G刷入Pixel Experience GSI全流程实战手册 在ColorOS与类原生Android之间,总有一群追求极简体验的玩家。Realme Q3 5G作为一款性价比突出的设备,其官方系统预装的应用和服务未必符合所有用户的期待。本文将带你完整走过从解锁到问题修复的全过…...
)
基于Javaweb的医院在线挂号系统(10007)
有需要的同学,源代码和配套文档领取,加文章最下方的名片哦 一、项目演示 项目演示视频 二、资料介绍 完整源代码(前后端源代码SQL脚本)配套文档(LWPPT开题报告/任务书)远程调试控屏包运行一键启动项目&…...