SLAM从入门到精通(amcl定位使用)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
学习slam,一般就是所谓的边定位、边制图的知识。然而在实际生产过程中,比如扫地机器人、agv、巡检机器人、农业机器人,很多情况下都是先绘制好地图。等地图ok了,再规划机器人特定的路径。路径这些都没问题了之后,机器人就会按照我们的设想,去指定的地方执行指定的任务就可以了。所以,制定完地图之后,后续的任务就不再需要制图了,主要就是定位。也就是机器人在行进的过程当中不要丢位置就可以了。
在这过程中其实就衍生出一些问题,也就是学术和生产的问题。对于学术来说,slam的制图和定位常常是一起的。而工业生产中,对定位的要求可能更多一点。这中间,因为场景变化很大,我们绘制出来的地图够不够鲁棒、满足要求,这很重要。除此之外,定位标准也是有差别的。道路上精度可以差一点,但是对于具体的库位,则要求必须精准。这也是学术和工业生产不一样的地方。
在ros上面,自带了一些定位算法,这中间就有amcl。虽然amcl比较经典,但是由于计算量比较大、反馈比较慢(常常是秒级别的),工业上用反光柱可能更多一点。但是这并不妨碍我们去学习amcl这个经典算法。
1、打开仿真场景
在开始使用amcl之前,第一步,我们需要的还是打开仿真场景,即输入完source ./devel/setup.sh之后,立刻输入roslaunch wpr_simulation wpb_stage_slam.launch。
2、启动map_server
amcl除了需要接收robot的odom、laser这些数据之外,另外一个很重要的输入就是map文件。所以这个时候需要输入rosrun map_server map_server ./map.yaml。
feixiaoxing@feixiaoxing-VirtualBox:~/Desktop/catkin_ws$ rosrun map_server map_server ./map.yaml
[ INFO] [1695982052.911529758]: Loading map from image "./map.pgm"
[ INFO] [1695982053.109551903, 334.643000000]: Read a 1024 X 1024 map @ 0.025 m/cell
[ INFO] [1695982275.007835915, 449.119000000]: Sending map
3、启动amcl
amcl的启动就比较简单了,直接输入rosrun amcl amcl即可。关于amcl的参数设置,我们将来可以慢慢理解,这里全部使用默认的参数。
feixiaoxing@feixiaoxing-VirtualBox:~/Desktop/catkin_ws$ rosrun amcl amcl
[ INFO] [1695982274.997554194]: Requesting the map...
[ INFO] [1695982275.107380439]: Received a 1024 X 1024 map @ 0.025 m/pix[ INFO] [1695982275.271526958, 449.297000000]: Initializing likelihood field model; this can take some time on large maps...
[ INFO] [1695982275.419726758, 449.388000000]: Done initializing likelihood field model.4、启动rviz
仿真环境、map_server和amcl都启动完毕之后,下面就是启动rviz了。直接输入rosrun rviz rviz即可。等rviz启动后,依次添加RobotModel、LaserScan、Map,最重要的就是还要添加PoseArray,也就是amcl生成的粒子数据。这些粒子决定了最终robot的位姿信息。
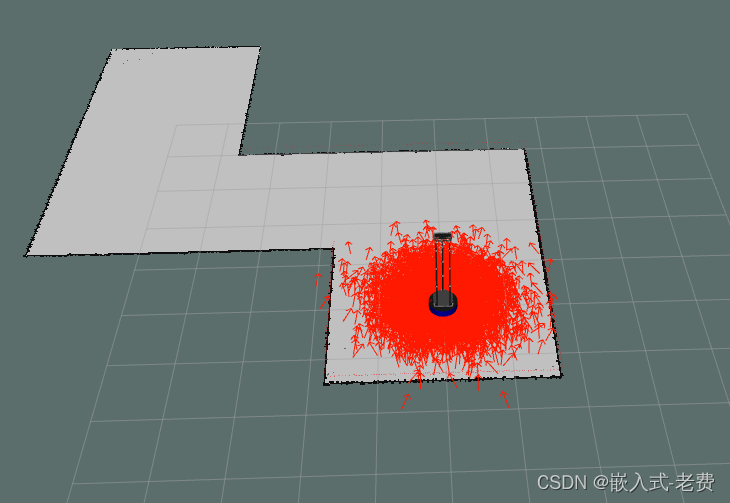
5、添加小车控制设备
为了实现对小车的控制,我们输入rosrun rqt_robot_steering rqt_robot_steering,就可以直接操纵小车移动了。随着小车的前进,大家会看到小车周围的粒子越来越集中,这也是amcl算法的特点,本身也说明了小车的位姿也是越来越准确了。
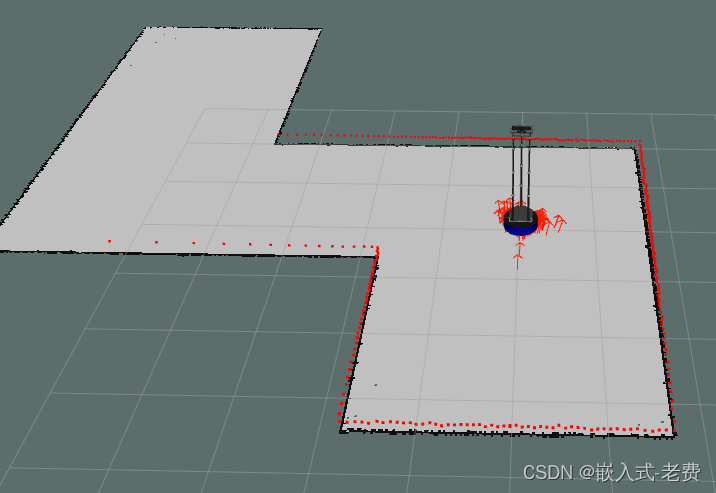
6、发布pose
前面我们通过amcl算法发现,车辆走的越远,位姿越来越稳定。这个时候,可以通过rostopic echo amcl_pose,查看小车的位姿信息,
feixiaoxing@feixiaoxing-VirtualBox:~/Desktop/catkin_ws$ rostopic echo amcl_pose
header: seq: 5stamp: secs: 367nsecs: 355000000frame_id: "map"
pose: pose: position: x: 1.829333671192329y: -0.023028699572001186z: 0.0orientation: x: 0.0y: 0.0z: -0.005907350114325032w: 0.9999825514550875covariance: [0.00653005930345163, 0.0013395990524377593, 0.0, 0.0, 0.0, 0.0, 0.0013395990524377593, 0.007374991974678432, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.002811733697012357]
---
上面position中的打印x、y、z是坐标信息,orientation中的x、y、z、w是角度信息,表示方法是四元数,如果需要看角度的话,需要进一步通过矩阵转成roll、pitch和yaw。因为机器人是运行在平面上的,所以这里的yaw就是我们希望获得的数值。至此,我们通过ros、hector slam和amcl就可以实现最最基本的slam工作了。
相关文章:
SLAM从入门到精通(amcl定位使用)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 学习slam,一般就是所谓的边定位、边制图的知识。然而在实际生产过程中,比如扫地机器人、agv、巡检机器人、农业机器人&…...
【C/C++】C/C++面试八股
C/C面试八股 C和C语言的区别简单介绍一下三大特性多态的实现原理虚函数的构成原理虚函数的调用原理虚表指针在什么地方进行初始化的?构造函数为什么不能是虚函数虚函数和纯虚函数的区别抽象类类对象的对象模型内存对齐是什么?为什么要内存对齐static关键…...

Scala第八章节
Scala第八章节 scala总目录 章节目标 能够使用trait独立完成适配器, 模板方法, 职责链设计模式能够独立叙述trait的构造机制能够了解trait继承class的写法能够独立完成程序员案例 1. 特质入门 1.1 概述 有些时候, 我们会遇到一些特定的需求, 即: 在不影响当前继承体系的情…...

k8s-实战——kubeadm二进制编译
文章目录 源码编译获取源码修改证书有效期修改 CA 有效期为 100 年(默认为 10 年)修改证书有效期为 100 年(默认为 1 年)CentOS7.9环境准备centos脚本安装执行脚本脚本内容手动安装验证编译查看编译后的版本信息参考链接脚本修改源码编译 源码编译kubeadm文件、修改证书的默…...

vite 和 webpack 的区别
1. 构建原理: Webpack 是一个静态模块打包器,通过对项目中的JavaScript、css、Image 等文件进行分析,生成对应的静态资源,并且通过一些插件和加载器来实现各种功能。 Vite 是一种基于浏览器元素 ES 模块解析构建工具,…...
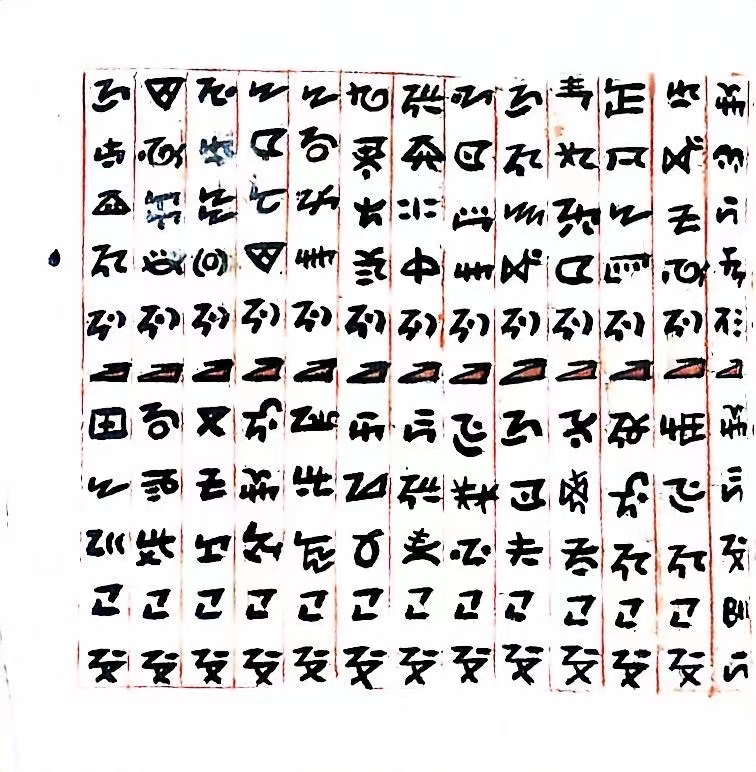
传统遗产与技术相遇,古彝文的数字化与保护
古彝文是中国彝族的传统文字,具有悠久的历史和文化价值。然而,由于古彝文的形状复杂且没有标准化的字符集,对其进行文字识别一直是一项具有挑战性的任务。本文介绍了古彝文合合信息的文字识别技术,旨在提高古彝文的自动识别准确性…...
多维时序 | MATLAB实现WOA-CNN-GRU-Attention多变量时间序列预测(SE注意力机制)
多维时序 | MATLAB实现WOA-CNN-GRU-Attention多变量时间序列预测(SE注意力机制) 目录 多维时序 | MATLAB实现WOA-CNN-GRU-Attention多变量时间序列预测(SE注意力机制)预测效果基本描述模型描述程序设计参考资料 预测效果 基本描述…...

1042 字符统计
description 请编写程序,找出一段给定文字中出现最频繁的那个英文字母。 输入格式: 输入在一行中给出一个长度不超过 1000 的字符串。字符串由 ASCII 码表中任意可见字符及空格组成,至少包含 1 个英文字母,以回车结束ÿ…...

3 OpenCV两张图片实现稀疏点云的生成
前文: 1 基于SIFT图像特征识别的匹配方法比较与实现 2 OpenCV实现的F矩阵RANSAC原理与实践 1 E矩阵 1.1 由F到E E K T ∗ F ∗ K E K^T * F * K EKT∗F∗K E 矩阵可以直接通过之前算好的 F 矩阵与相机内参 K 矩阵获得 Mat E K.t() * F * K;相机内参获得的方式…...

在Springboot项目中使用Redis提供给Lua的脚本
在Springboot项目中使用Redis提供给Lua的脚本 在Spring Boot项目中,你可以使用RedisTemplate来执行Lua脚本。RedisTemplate是Spring Data Redis提供的一个Redis客户端,它可以方便地与Redis进行交互。以下是使用RedisTemplate执行Lua脚本的一般步骤&…...
分类预测 | MATLAB实现NGO-CNN北方苍鹰算法优化卷积神经网络数据分类预测
分类预测 | MATLAB实现NGO-CNN北方苍鹰算法优化卷积神经网络数据分类预测 目录 分类预测 | MATLAB实现NGO-CNN北方苍鹰算法优化卷积神经网络数据分类预测分类效果基本描述程序设计参考资料 分类效果 基本描述 1.Matlab实现NGO-CNN北方苍鹰算法优化卷积神经网络数据分类预测&…...
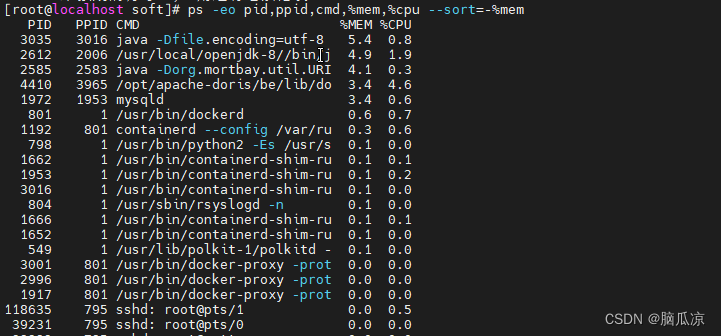
Linux或Centos查看CPU和内存占用情况_top只能查看对应的命令_如何查看具体进程---linux工作笔记062
一般我们都是用top去查看,但是top查看的结果,不能看出,具体是哪个程序占用的,这就很苦恼.. 其实如果有时间的话,再去专门看一下网络安全和linux脚本以及命令方面的,比较系统的看一下比较好.现在积累的都是工作中用到的,比较零散的知识. 如果用top,比如说这里的java,就只能知道…...

什么是DevOps
文章目录 一、概念二、地位三、目标四、要求五、具体手段 一、概念 是一组过程、方法与系统的统称,有助于打破开发、测试、运维、交付部门之间的壁垒,提高部门间的沟通协助能力。 二、地位 应成为公司的一种理念、文化、哲学。 三、目标 实现更加高…...

力扣每日一题
605. 种花问题 - 力扣(LeetCode) 动态规划 class Solution { public:bool canPlaceFlowers(vector<int>& flowerbed, int n) {int m flowerbed.size();if(1 m)return !flowerbed[0] > n;else if(2 m)return ((!flowerbed[0] &&…...

测试OpenCvSharp库的模板匹配功能
微信公众号“Dotnet讲堂”的文章《c#实现模板匹配,并输出匹配坐标》(参考文献1)中介绍了采用OpenCVSharp库实现模板匹配功能,也即在目标图片中定位指定图片内容的示例,本文参照参考文献1-4,学习并测试OpenC…...

网络编程day04(网络属性函数、广播、组播、TCP并发)
今日任务 对于newfd的话,最好是另存然后传入给分支线程,避免父子线程操作同一个文件描述符 ------------在tcp多线程服务端---------- 如果使用全局变量,或者指针方式间接访问,会导致所有线程共用一份newfd和cin,那么…...
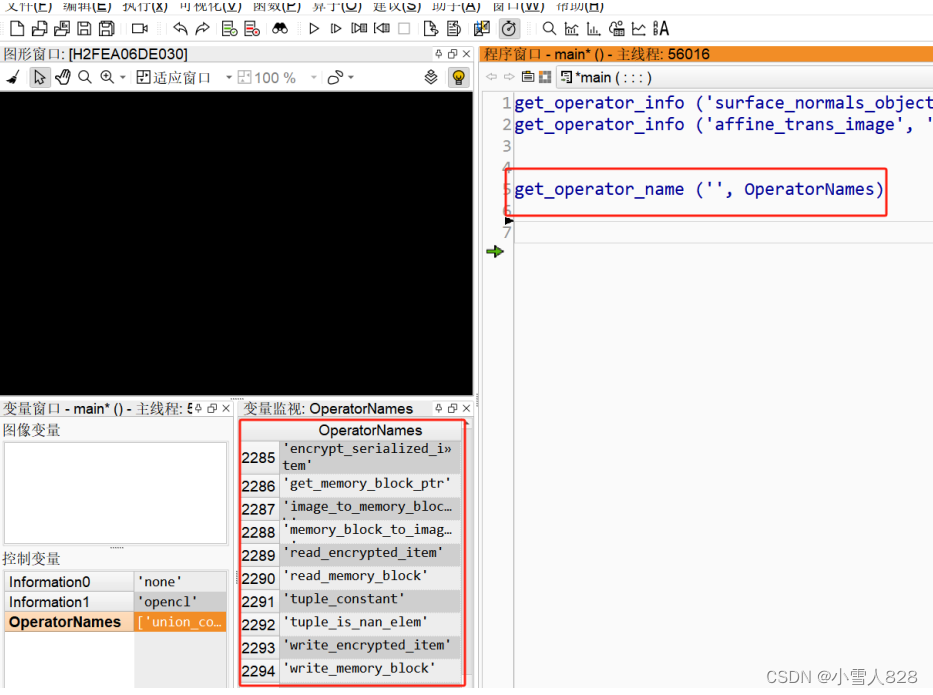
HALCON支持GPU加速的算子有哪些?
参考例程get_operator_info。 get_opencl_operators这里可以查看到所有支持gpu加速的算子。 支持的算子列表: crop_rectangle1,deviation_image,mean_image,points_harris,gray_opening_shape, gray_dilat…...
MacBook Pro 电池电量限制充电怎么设置AlDente Pro for Mac最大充电限制工具
通过充电电量限制工具可以更好的保护MacBook Pro的电池,通过 AlDente Pro 您可以设置电池的最大充电百分比设置为 20% 至 100%,然后,它将保持在所需的电池百分比,然后再次使用电源适配器进行充电。 AlDent…...
毕业设计选题之Java+springboot线上蔬菜销售与配送系统(源码+调试+开题+lw)
💕💕作者:计算机源码社 💕💕个人简介:本人七年开发经验,擅长Java、Python、PHP、.NET、微信小程序、爬虫、大数据等,大家有这一块的问题可以一起交流! 💕&…...

【Leetcode】162.寻找峰值
一、题目 1、题目描述 峰值元素是指其值严格大于左右相邻值的元素。 给你一个整数数组 nums,找到峰值元素并返回其索引。数组可能包含多个峰值,在这种情况下,返回 任何一个峰值 所在位置即可。 你可以假设 nums[-1] = nums[n] = -∞ 。 你必须实现时间复杂度为 O(log n…...

Kubernetes 集群管理新选择:Kuboard 图形化界面实战解析
1. 为什么你需要Kuboard这样的Kubernetes图形化管理工具 如果你刚开始接触Kubernetes,可能会被它复杂的命令行操作吓到。记得我第一次使用kubectl时,光是记住各种命令参数就花了两周时间。后来团队规模扩大,管理多个集群时,命令行…...
)
当NB-IoT遇上同步轨道卫星:GEO场景下的定时关系增强全指南(基于3GPP Release 17最新规范)
GEO卫星场景下NB-IoT定时关系增强技术解析 1. GEO卫星通信与NB-IoT的技术融合挑战 地球静止轨道(GEO)卫星通信与窄带物联网(NB-IoT)技术的结合,为全球物联网覆盖提供了革命性解决方案。GEO卫星位于地球赤道上空35,786公…...

A-59F 多功能语音处理模组:覆盖全场景人群,让每一次语音都清晰无噪
在门禁对讲、会议扩音、车载通话、导游喊话、监护设备、智能工牌等各类语音设备中,啸叫刺耳、环境嘈杂、回音不断、拾音模糊、通话断续是所有人共同的痛点。一款真正解决问题的核心硬件 ——A-59F 多功能语音处理模组,它集成扩音防啸叫、AI ENC 降噪、AE…...
从音频生成到DNA分析:手把手带你用S4和Hyena搞定Transformer不擅长的那些长序列任务
从音频生成到DNA分析:手把手带你用S4和Hyena搞定Transformer不擅长的那些长序列任务 当我们需要处理长达数小时的音频波形、百万碱基对的DNA序列或整本小说级别的文本时,传统Transformer架构很快就会遇到计算瓶颈。本文将带您探索两种突破性的序列建模方…...

用TurtleBot3实测:Navigation2局部代价地图的滚动窗口为何必须用odom坐标系?
TurtleBot3实测:为什么Navigation2局部代价地图必须绑定odom坐标系? 当你在Gazebo中第一次看到TurtleBot3的导航表现时,可能会对局部代价地图(Local Costmap)的坐标系选择产生疑问。为什么这个实时更新的避障地图要绑定…...

LFM2.5-1.2B-Thinking-GGUF代码生成能力评测:对比Claude Code的轻量化替代方案
LFM2.5-1.2B-Thinking-GGUF代码生成能力评测:对比Claude Code的轻量化替代方案 1. 评测背景与模型特点 在当今AI辅助编程领域,大型语言模型已经成为开发者日常工作的得力助手。然而,许多高性能模型往往需要云端部署或强大的计算资源&#x…...

vLLM-v0.17.1在专利分析系统中的应用:权利要求生成与比对
vLLM-v0.17.1在专利分析系统中的应用:权利要求生成与比对 1. 技术背景与需求分析 专利分析是知识产权领域的重要工作,其中权利要求书的生成与比对是核心环节。传统方法依赖人工撰写和比对,效率低下且一致性难以保证。随着大语言模型技术的发…...

【CDA干货】三个部门三个营收数:1200 万、1150 万、1280 万?企业指标口径不一致,三步破局
财务部报的Q3营收是1200万,运营部那边却是1150万,更离谱的是CEO给投资人看的PPT上写着1280万。这种事儿听起来是不是很离谱?但实际上,数据对不上,这事儿太常见了。表面看是数字打架,实际上是人跟人较劲——…...

基于MATLAB的VSG逆变器无源性分析与稳定性研究
基于MATLAB的VSG逆变器无源性分析与稳定性研究 摘要 随着分布式发电和微电网技术的快速发展,逆变器作为新能源并网的关键接口,其稳定性问题日益突出。虚拟同步发电机(VSG)控制技术通过模拟同步发电机的机电特性,为逆变器提供惯性和阻尼支撑,成为提升系统稳定性的重要手…...

2026年AI智能体大爆发:下一个十年风口,普通人的超级财富密码
比尔盖茨曾断言:“AI智能体(AI Agent)将彻底改变人们使用计算机的方式。”如果说2023年是大语言模型(LLM)的启蒙元年,那么到2026年,具备“感知-规划-行动”自主闭环能力的AI智能体将迎来真正的商…...