myArm 全新七轴桌面型机械臂
引言
在不断演进的科技世界中,我们始终追求创新和卓越,以满足客户的需求并超越他们的期望。今天,我们很高兴地宣布我们的最新产品——myArm 300 Pi,一款七轴的桌面型机械臂。这款产品的独特之处在于其灵活性和可编程性,以及它的工作半径和嵌入式控制主板的选择。在本文中,我们将详细介绍myArm 300 Pi的特性和功能,并将其与我们的六轴机械臂进行比较,以便您更好地理解我们的新产品以及它如何满足您的需求。
Introduction
myArm 300 Pi是一块全新的7自由度的中心对称构型协作机械臂,设计风格延续了myCobot系列的小巧轻便的特点。myArm搭载着7个高精度的伺服电机,使得最大工作半径300mm,末端最大负载成都能够达到200g,重复定位精度最高达到了±0.5mm。

myArm 300 Pi的控制主板采用了树莓派4B 4G,这是一种广受欢迎的微型计算机,因其强大的性能和灵活的编程环境而备受赞誉。这意味着用户可以使用多种编程语言来控制myArm 300 Pi,包括Python、C++、Java等,极大地提高了使用者的便利性和灵活性,它还支持ROS1/ROS2 在ROS操作系统中提供了许多功能,例如路径规划,避障,三维感知等。
可能你会问为什么要出一个7自由度的机械臂呢?6个自由度的机械臂不已经是模拟人们手臂的关节了嘛?接下来跟随着我们一起来探讨为什么要有7个自由度的机械臂。
6自由度的机械臂和7自由度的机械臂有什么区别?
接下来我们主要从四个方面来介绍6自由度的和7自由度的机械臂有什么区别。
- 自由度
顾名思义,从数量上七自由度的机械臂会比六自由度的机械臂多一个可以活动的关节。在大多数情况下,一个六轴机械臂具有完成其任务所需的最小自由度,三个自由度用于空间位置定位,另外三个自由度用于末端执行器的定位方向。而七轴机械臂是一个冗余的机器人,它同样有3个轴用于定位,三个轴用于定向,多的一个轴通常用于提供更多的灵活性和运动自由度。(冗余机器人是指超过了完成特定的任务所需的最小的自由度的机器人)
- 复杂的动作
这两种机械臂最大的一个特点是,7轴机械臂可以在做一些复杂的动作,保持末端的三维结构不变的情况下变换到另一个构型。而六轴机械臂是做不到的,六轴机械臂在同一个位置进行工作的时候,有时候会整个机械臂扭到另一边。

就如图中所显示的一样,只是简单的平移一个位置,机械臂的整体会进行一个大的结构变化。这是因为6轴机械臂关节的限制所导致的一个结果。(图中的是myCobot 280 一个六轴的机械臂)
我们再看myArm同样的效果是怎样的,保持机械臂末端的位置不进行大幅的改变。
这个动作是7轴机械臂能够做到的特别的运动轨迹,另一种说法叫冗余机械臂,可以在保持末端坐标位置的同时,机械臂的整体可以进行大幅度的改变,这是6轴机械臂做所不到的复杂动作。还有一些特别的动作是7轴才能够完成的,例如下图的伸缩的轨迹。这使得myArm可以在更狭窄,更复杂的环境中工作。

- 应用的环境
六轴机械臂和七轴机械臂在大多数的场景下都能够应付,例如工业生产,物流和仓储,医疗领域,研究和开发,服务行业,教育等场景。
但是在一些 特定的场景当中使用7轴机械臂可以更加适合,主要是因为7轴机械臂有更大的灵活性和更复杂的运动能力。
- 复杂的路径规划:在需要机械臂沿着特定路径(例如复杂的曲线或者在障碍物周围)进行精确移动的情况下,7轴机械臂可能会比6轴机械臂更有优势。这是因为额外的关节可以提供更多的运动自由度,使机械臂能够在更复杂的环境中进行操作。
- 空间的利用率:在空间有限的环境中,例如在紧凑的工作站或者拥挤的工厂环境中,7轴机械臂可以更好地利用空间,执行更复杂的任务。额外的关节可以使机械臂在执行任务时采取更多的姿势,从而在有限的空间内完成更多的工作。
- 精密操作:在需要进行精密操作的应用中,例如微创手术或者微电子设备的装配,7轴机械臂可能会比6轴机械臂更有优势。额外的关节可以提供更精确的控制,使机械臂能够进行更精细的操作。
- 避障:7轴机械臂由于多出的一个自由度,使得在需要避开障碍物的场景中,7轴机械臂能够更好地完成任务。例如,在复杂的工厂环境或者在需要避开人体进行手术的医疗环境。
- 控制和编程
控制
从正逆运动学的角度来说,正运动学是给定指定的机械臂的关节角度,计算机械臂末端的位置和方向的过程 ,在6轴和 7轴机械臂中,正运动学都是相对直接的,可以通过几何和三角函数来解决。
逆运动学是指给定机械臂末端的目标位置和方向,计算需要的关节角度的过程。对于6轴机器人,逆运动学问题通常有唯一解(在某些特定位置可能有多解或无解)。然而,对于7轴机器人,由于有一个额外的自由度,逆运动学问题可能有无穷多个解。这就需要使用一些优化方法或启发式方法来选择最优的解,例如选择最小化关节运动,避免关节极限,或者满足其他一些特定的约束条件的解。所以会比六轴机械臂 要复杂的多。更多的自由度意味着需要更复杂的控制策略,设计和制造,计算需求等。
编程
mycobot280 有的编程环境,myArm300都能适配,他不仅仅支持ROS环境,还能通过python进行控制,你完全可以选择你熟悉的编译平台,不需要在花费大量的时间去进行学习一门新的编译语言。
大象机器人在最大的程度上提供了更用户更多的可能。可以在各种平台上进行开发,开放了许多的控制接口,例如力矩,扭矩等参数。
总结
在对比六轴和七轴机械臂的性能和功能后,我们可以看到myArm 300 Pi七轴机械臂的出色之处。七轴机械臂的一个显著优点是其增强的灵活性和自由度,这使得它可以在更复杂、更狭窄的环境中工作,执行更为复杂的任务。相比之下,尽管六轴机械臂在许多应用中已经表现得足够好,但在某些特定场景下,比如需要在狭窄空间内进行精细操作的情况,七轴机械臂的优势就显现出来。
此外,myArm 300 Pi七轴机械臂的树莓派控制主板、开放的控制接口和ROS机器人操作系统使得它在编程灵活性和扩展性方面超越了传统的六轴机械臂。这些特性使得myArm 300 Pi不仅适用于传统的机械操作任务,也非常适合进行高级的机器人研究和开发。
我们希望更多的用户能用myArm创作出更加有趣,有意义的项目,如果你想了解更多关于myArm的信息请点击连接,如果有提议的请在下方留言,如果喜欢这篇文章请给我们点赞!
相关文章:
myArm 全新七轴桌面型机械臂
引言 在不断演进的科技世界中,我们始终追求创新和卓越,以满足客户的需求并超越他们的期望。今天,我们很高兴地宣布我们的最新产品——myArm 300 Pi,一款七轴的桌面型机械臂。这款产品的独特之处在于其灵活性和可编程性,…...

tomcat乱码解决
解决乱码 1、修改bin\catalina.bat配置文件 修改tomcat的配置文件,找到tomcat路径下的\bin目录下的catalina.bat文件,修改 set “JAVA_OPTS%JAVA_OPTS% %JSSE_OPTS% -Dfile.encodingUTF-8 -Dsun.jnu.encodingUTF-8 ” 2、修改conf\logging.properties配置…...
【Linux】详解线程第三篇——线程同步和生产消费者模型
线程同步和生消模型 前言正式开始再次用黄牛抢票来讲解线程同步的思想通过条件变量来实现线程同步条件变量接口介绍初始化和销毁pthread_cond_waitsignal和broadcast 生产消费者模型三种关系用基本工程师思维再次理解基于生产消费者模型的阻塞队列版本一版本二多生多消 利用RAI…...

k8s 安装
文章目录 k8s 客户端安装k8s集群minikubekindkubeadm 验证 k8s 客户端 用于连接k8s集群,建议下载1.23.x的版本,其他的版本本地运行可能会有莫名其妙的报错 https://dl.k8s.io/release/v1.23.16/bin/linux/amd64/kubectl 安装k8s集群 minikube Minik…...

红队打靶:THE PLANETS: MERCURY打靶思路详解(vulnhub)
目录 写在开头 第一步:主机发现和端口扫描 第二步:Web渗透 第三步:获取初步立足点并搜集信息 第四步:软连接劫持sudo提权 总结与思考 写在开头 本篇博客在自己的理解之上根据大佬红队笔记的视频进行打靶,详述了…...
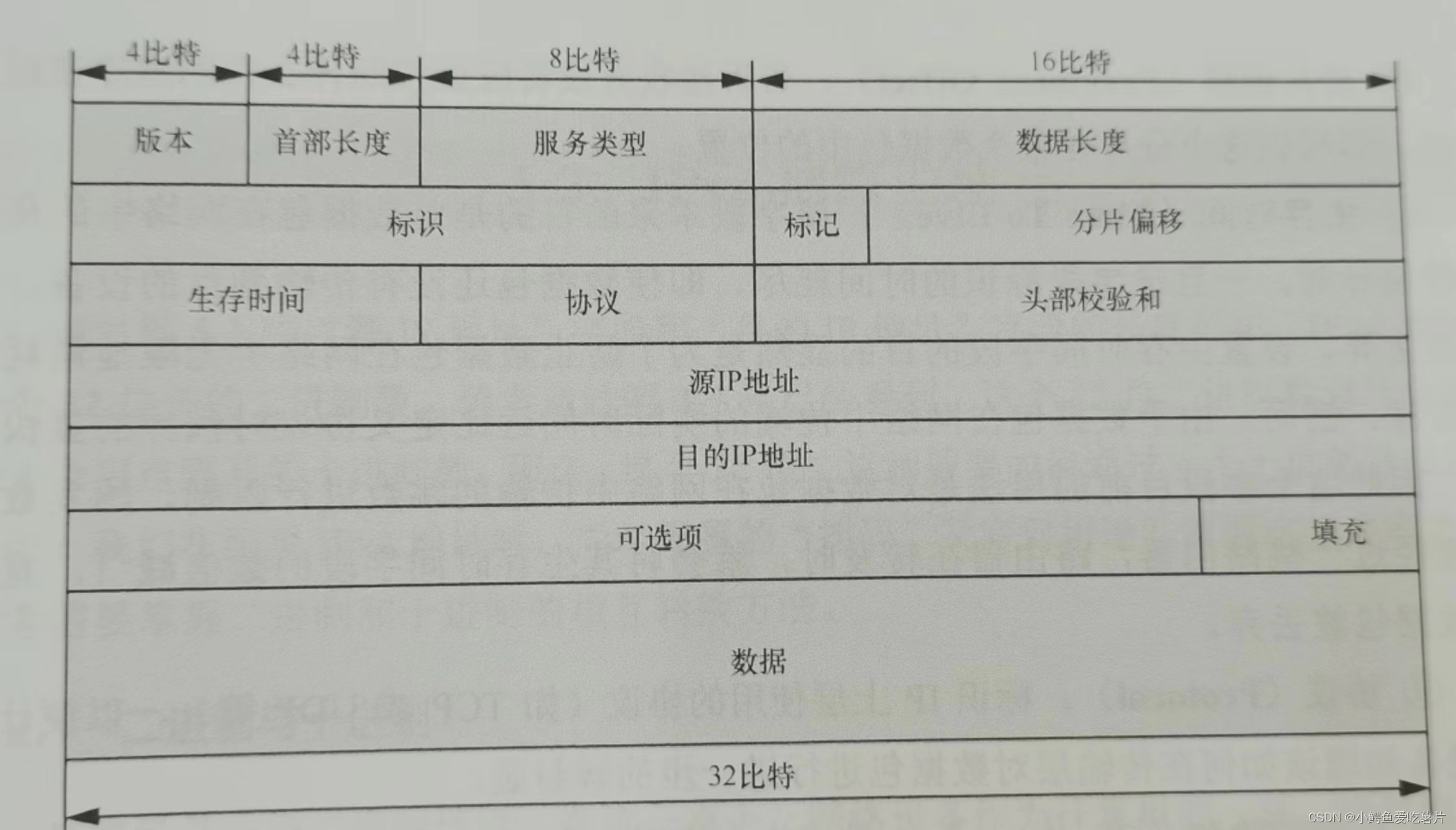
【网络协议】IP
当连接多个异构的局域网形成强烈需求时,用户不满足于仅在一个局域网内进行通信,他们希望通过更高一层协议最终实现异构网络之间的连接。既然需要通过更高一层的协议将多个局域网进行互联,那么这个协议就必须为不同的局域网环境定义统一的寻址…...

Python 布尔类型
布尔值表示两个值之一:True(真)或False(假)。 布尔值 在编程中,您经常需要知道一个表达式是否为True或False。 您可以在Python中评估任何表达式,并获得两个答案之一:True或False。…...

iOS设备管理器iMazing比iTunes好用吗?有哪些优势
虽然 iTunes 是 Apple 官方指定的 iPhone 数据备份和管理工具,但是一直以来 iTunes 卡顿的使用体验和过慢的备份过程为不少人诟病。如果大家也被 iTunes 体验不佳的备份和管理功能所困扰,那么简单易用、功能强大的iMazing 能为你解决这个问题。 iMazing…...

Opengl之深度测试
在坐标系统小节中,我们渲染了一个3D箱子,并且运用了深度缓冲(Depth Buffer)来防止被阻挡的面渲染到其它面的前面。在这一节中,我们将会更加深入地讨论这些储存在深度缓冲(或z缓冲(z-buffer))中的深度值(Depth Value),以及它们是如何确定一个片段是处于其它片段后方的。 …...

利用ICG-NH2/Amine进行DNA标记1686147-55-6星戈瑞
ICG-NH2(吲哚菁绿胺)可以用于DNA标记,这种标记方法通常涉及到DNA上的胺基反应基团和ICG-NH2之间的化学反应。以下是一种常见的方法,用于利用ICG-NH2标记DNA分子: 步骤: 1.准备目标DNA:你需要准…...

Pyecharts数据可视化
Pyecharts数据可视化 1、Pyecharts模块2、柱状图3、折线图4、饼图5、散点图6、图表合并7、词云8、地图 1、Pyecharts模块 ECharts是百度提供的基于JavaScript的开源可视化库,主要用于Web端数据可视化 Echarts是通过JS实现的,Pyecharts则可以使用Python来…...
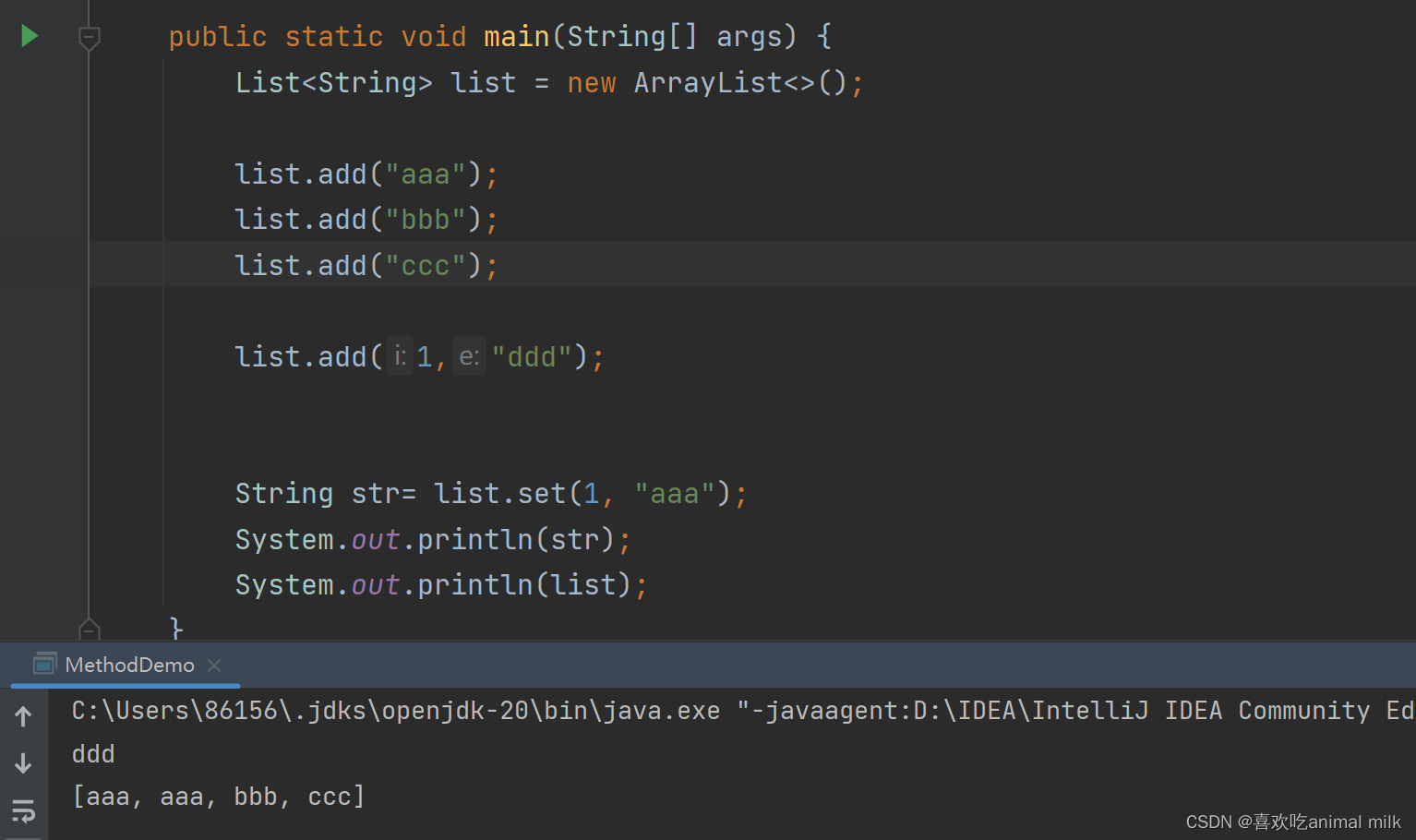
集合-List集合
系列文章目录 1.集合-Collection-CSDN博客 2.集合-List集合-CSDN博客 文章目录 目录 系列文章目录 文章目录 前言 一 . 什么是List? 二 . List集合的特点 三 . 常用方法 1.void add(int index, E element): 将指定的元素插入到列表的指定位置。 2.E remove(int in…...

vuex的使用
1 vuex的使用 1 vuex的使用 store/index.js -在Vue中实现集中式状态(数据)管理的一个Vue插件,对vue应用中多个组件的共享状态进行集中式 的管理(读/写),也是一种组件间通信的方式,且适用于任意…...
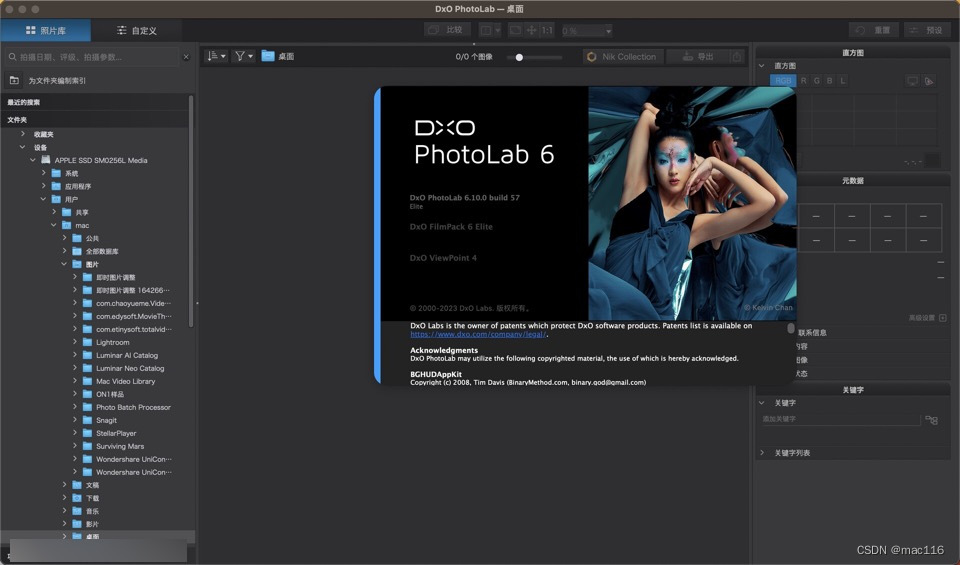
raw图片处理软件:DxO PhotoLab 6 mac中文版支持相机格式
DxO PhotoLab 6 mac是一款专业的RAW图片处理软件,适用于Mac操作系统。它具有先进的图像处理技术和直观易用的界面,可帮助用户轻松地将RAW格式的照片转换为高质量的JPEG或TIFF图像。 DxO PhotoLab 6支持多种相机品牌的RAW格式,包括佳能、尼康、…...

ReactPortals传送门
ReactPortals传送门 React Portals提供了一种将子节点渲染到父组件以外的DOM节点的解决方案,即允许将JSX作为children渲染至DOM的不同部分,最常见用例是子组件需要从视觉上脱离父容器,例如对话框、浮动工具栏、提示信息等。 描述 <div&…...
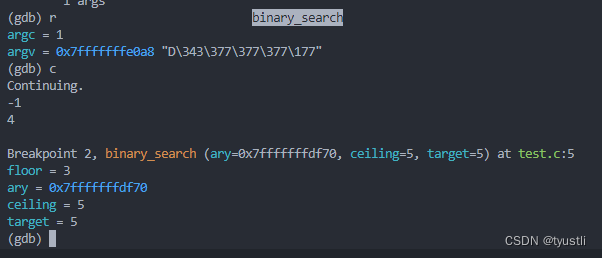
【GDB】 command 命令
GDB command 命令 语法 command 命令是一个很好用的调试命令,它配合断点使用,可以在指定的断点执行预先设置的命令 其语法为:command bread_id,这样会提示你输入你要执行的命令,以 end 结束。这个 bread_id 就是用 …...
1038 统计同成绩学生
输入样例: 10 60 75 90 55 75 99 82 90 75 50 3 75 90 88 输出样例: 3 2 0 solution #include <stdio.h> int main(){int n, d, k, hash[101] {0}, a[100000];scanf("%d", &n);for(int i 0; i < n; i){scanf("%d&quo…...

git报错:Failed to connect to 127.0.0.1 port 1080
Bug描述 由于在试了网上的这条命令 git config --global http.proxy socks5 127.0.0.1:1080 git config --global https.proxy socks5 127.0.0.1:1080git config --global http.proxy 127.0.0.1:1080 git config --global https.proxy 127.0.0.1:1080Bug描述:Faile…...
php eayswoole node axios crypto-js 实现大文件分片上传复盘
不啰嗦 直接上步骤 步骤1.开发环境配置 项目需要node.js 做前端支撑 官网下载地址: http://nodejs.cn/download/ 根据自己需要下载对应的版本,我下载的是windows系统64位的版本。 包下载好后 进行安装,安装步骤在此省略... 测试是否安装成功 …...
《Upload-Labs》01. Pass 1~13
Upload-Labs 索引前言Pass-01题解 Pass-02题解总结 Pass-03题解总结 Pass-04题解 Pass-05题解总结 Pass-06题解总结 Pass-07题解总结 Pass-08题解总结 Pass-09题解 Pass-10题解 Pass-11题解 Pass-12题解总结 Pass-13题解 靶场部署在 VMware - Win7。 靶场地址:https…...
)
限时开放:ChatGPT Slogan生成专业版Prompt集(含金融/快消/科技三大垂直领域加密模板)
更多请点击: https://intelliparadigm.com 第一章:ChatGPT Slogan生成的核心原理与边界认知 ChatGPT 生成 slogan 的本质并非“创意发明”,而是基于大规模语料统计规律的条件概率采样。其输出受限于训练数据分布、指令微调策略(如…...

告别枯燥理论:用51单片机和DAC0832做个迷你音乐合成器,汇编语言实现《小星星》
用51单片机和DAC0832打造迷你音乐合成器:汇编语言实现《小星星》全解析 在嵌入式系统学习的道路上,很多初学者都会遇到一个共同的问题:如何将枯燥的理论知识转化为有趣的实际应用?今天,我们就来打破常规,用…...

Illustrator脚本自动化终极指南:如何节省设计师90%重复工作时间
Illustrator脚本自动化终极指南:如何节省设计师90%重复工作时间 【免费下载链接】illustrator-scripts Adobe Illustrator scripts 项目地址: https://gitcode.com/gh_mirrors/il/illustrator-scripts Adobe Illustrator脚本自动化是每个设计师都应该掌握的生…...

深入GORM源码:手把手教你为自定义字段打造专属‘Clause钩子’
深入GORM源码:手把手教你为自定义字段打造专属‘Clause钩子’ 在当今快速迭代的业务场景中,数据库操作早已不再是简单的CRUD。当我们面对复杂的状态流转、多租户隔离或敏感数据加密时,往往需要在数据持久化层植入特定的业务逻辑。GORM作为Go生…...

如何轻松解锁Cursor Pro完整功能:一键激活与无限使用的完整指南
如何轻松解锁Cursor Pro完整功能:一键激活与无限使用的完整指南 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached…...

别让求解器‘装傻’:COMSOL中‘事件接口’的隐藏用法与常见坑点
别让求解器‘装傻’:COMSOL中‘事件接口’的隐藏用法与常见坑点 在瞬态耦合仿真中,你是否遇到过这样的场景:电磁场脉冲已经结束,但温度场仍在缓慢爬升;或者结构载荷突然释放,但求解器却将突变平滑处理&…...

建立个人学习SOP:信息输入、消化吸收与输出实践
对于软件测试从业者而言,技术迭代的速度往往快于岗位技能的沉淀周期。从自动化框架的百花齐放到 AI 驱动测试的兴起,从微服务架构下的契约测试到混沌工程在稳定性领域的渗透,测试人员需要持续吸收新知识,却又极易陷入“学得越多&a…...
Realme Q3 5G刷Pixel Experience GSI保姆级教程(附问题修复与救砖指南)
Realme Q3 5G刷入Pixel Experience GSI全流程实战手册 在ColorOS与类原生Android之间,总有一群追求极简体验的玩家。Realme Q3 5G作为一款性价比突出的设备,其官方系统预装的应用和服务未必符合所有用户的期待。本文将带你完整走过从解锁到问题修复的全过…...

别再让图片拖慢你的Unity项目!手把手教你用AssetPostprocessor搞定尺寸与压缩
Unity项目性能优化:智能图片处理全攻略 1. 为什么图片处理对Unity项目至关重要 在Unity开发过程中,图片资源往往是项目体积膨胀的罪魁祸首。一个中型项目可能包含数千张纹理,如果不加控制,这些资源会迅速吞噬内存和存储空间。更糟…...

终极指南:在Windows上免模拟器安装安卓应用的创新方案
终极指南:在Windows上免模拟器安装安卓应用的创新方案 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer APK Installer 是一款专为Windows系统设计的安卓应用…...