【Python】基于OpenCV人脸追踪、手势识别控制的求实之路FPS游戏操作
【Python】基于OpenCV人脸追踪、手势识别控制的求实之路FPS游戏操作
文章目录
- 手势识别
- 人脸追踪
- 键盘控制
- 整体代码
- 附录:列表的赋值类型和py打包
- 列表赋值
- BUG复现
- 代码改进
- 优化
- 总结
- py打包
视频:
基于OpenCV人脸追踪、手势识别控制的求实之路FPS游戏操作
手势识别
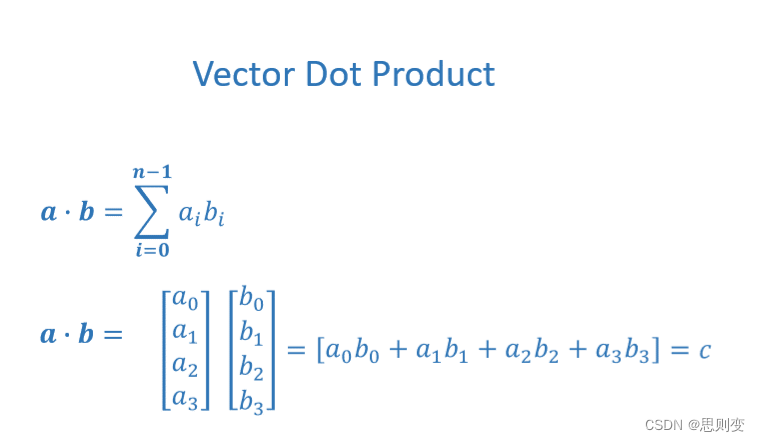
采用MediaPipe模块来完成手势识别 同时通过计算各个关键点与手掌平面的角度来判断手指是否弯曲、伸展
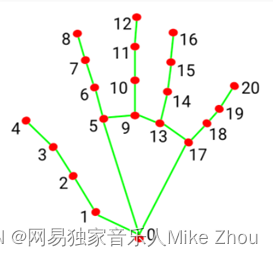
如上图为各个关键点的ID序号
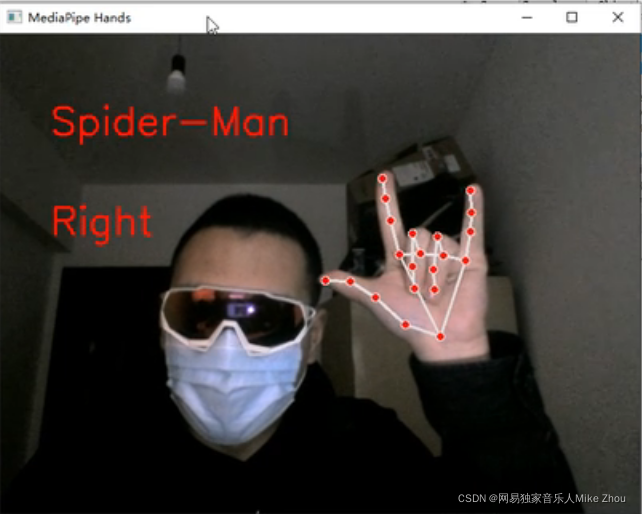
比如蜘蛛侠手势:
elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Spider-Man"
就是判断拇指 食指 小指伸展 其他闭合
【优秀课设】基于OpenCV+MediaPipe的手势识别(数字、石头剪刀布等手势识别)
def vector_2d_angle(v1,v2):'''求解二维向量的角度'''v1_x=v1[0]v1_y=v1[1]v2_x=v2[0]v2_y=v2[1]try:angle_= math.degrees(math.acos((v1_x*v2_x+v1_y*v2_y)/(((v1_x**2+v1_y**2)**0.5)*((v2_x**2+v2_y**2)**0.5))))except:angle_ =65535.if angle_ > 180.:angle_ = 65535.return angle_def hand_angle(hand_):'''获取对应手相关向量的二维角度,根据角度确定手势'''angle_list = []#---------------------------- thumb 大拇指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[2][0])),(int(hand_[0][1])-int(hand_[2][1]))),((int(hand_[3][0])- int(hand_[4][0])),(int(hand_[3][1])- int(hand_[4][1]))))angle_list.append(angle_)#---------------------------- index 食指角度angle_ = vector_2d_angle(((int(hand_[0][0])-int(hand_[6][0])),(int(hand_[0][1])- int(hand_[6][1]))),((int(hand_[7][0])- int(hand_[8][0])),(int(hand_[7][1])- int(hand_[8][1]))))angle_list.append(angle_)#---------------------------- middle 中指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[10][0])),(int(hand_[0][1])- int(hand_[10][1]))),((int(hand_[11][0])- int(hand_[12][0])),(int(hand_[11][1])- int(hand_[12][1]))))angle_list.append(angle_)#---------------------------- ring 无名指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[14][0])),(int(hand_[0][1])- int(hand_[14][1]))),((int(hand_[15][0])- int(hand_[16][0])),(int(hand_[15][1])- int(hand_[16][1]))))angle_list.append(angle_)#---------------------------- pink 小拇指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[18][0])),(int(hand_[0][1])- int(hand_[18][1]))),((int(hand_[19][0])- int(hand_[20][0])),(int(hand_[19][1])- int(hand_[20][1]))))angle_list.append(angle_)return angle_listdef h_gesture(angle_list):'''# 二维约束的方法定义手势# fist five gun love one six three thumbup yeah'''thr_angle = 65. #手指闭合则大于这个值(大拇指除外)thr_angle_thumb = 53. #大拇指闭合则大于这个值thr_angle_s = 49. #手指张开则小于这个值gesture_str = "Unknown"if 65535. not in angle_list:if (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "0"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "1"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "2"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]>thr_angle):gesture_str = "3"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]<thr_angle_s):gesture_str = "4"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]<thr_angle_s):gesture_str = "5"elif (angle_list[0]<thr_angle_s) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "6"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "8"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Pink Up"elif (angle_list[0]<thr_angle_s) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "Thumb Up"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]<thr_angle_s) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "Fuck"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]<thr_angle_s):gesture_str = "Princess"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "Bye"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Spider-Man"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Rock'n'Roll"return gesture_strdef hand_detect():global qglobal kill_all_flagglobal cam_imgbye_flag = 0bye_time = time.time()hand_jugg = Nonegesture_str = Nonewhile True:time.sleep(0.1)while q==0:time.sleep(0.1)frame = cv2.cvtColor(cam_img, cv2.COLOR_BGR2RGB)results = hands.process(frame)if results.multi_handedness: for hand_label in results.multi_handedness:hand_jugg=str(hand_label).split('"')[1]+" Hand"print(hand_jugg)
# cv2.putText(faceImg,hand_jugg,(50,200),0,1.3,(0,0,255),2)if results.multi_hand_landmarks:for hand_landmarks in results.multi_hand_landmarks:
# mp_drawing.draw_landmarks(faceImg, hand_landmarks, mp_hands.HAND_CONNECTIONS)hand_local = []for i in range(21):x = hand_landmarks.landmark[i].x*frame.shape[1]y = hand_landmarks.landmark[i].y*frame.shape[0]hand_local.append((x,y))if hand_local:angle_list = hand_angle(hand_local)gesture_str = h_gesture(angle_list)print(gesture_str)
# cv2.putText(faceImg,gesture_str,(50,100),0,1.3,(0,0,255),2)if gesture_str == "Bye":if bye_flag == 0:bye_flag = 1elif bye_flag == 1 and time.time() - bye_time >= 3:kill_all_flag = 1q = 1print("Good-Bye")else:bye_flag = 1 else:Keyborad(hand_jugg,gesture_str)bye_flag = 0hand_jugg = Nonegesture_str = Noneif q == 1:breakif kill_all_flag == 1:breakreturn
人脸追踪
【优秀毕设V2.0】基于树莓派的OpenCV-Python摄像头人脸追踪及手势识别、网络地址推流及远程控制系统(多功能系统、含演示视频)
此部分简单易懂
就是靠识别人脸的位置 然后再判断位置就可以了
def track():global qglobal kill_all_flagglobal cam_imgglobal left_pointglobal right_pointwhile True:time.sleep(0.1)while q==0: time.sleep(0.05) gray = cv2.cvtColor(cam_img,cv2.COLOR_BGR2GRAY)faceRects = classifier.detectMultiScale(gray,scaleFactor=1.2,minNeighbors=3,minSize=(32, 32))if len(faceRects):x,y,w,h = faceRects[0]# 框选出人脸 最后一个参数2是框线宽度
# cv2.rectangle(faceImg,(x, y), (x + w, y + h), (0,255,0), 2)central_point = x+w/2 if central_point > left_point:print("Right")Mouse(1)elif central_point < right_point:print("Left")Mouse(2)else:Mouse(0)if q == 1:print("S")breakif kill_all_flag == 1:breakreturn
键盘控制
采用pyautogui库来进行
以下两个函数分别是鼠标移动和键盘操作
def Mouse(flag):print(flag)if flag==1:pyautogui.moveTo(100, 100, duration=0.25)passelif flag==2:pyautogui.moveRel(-50, 0, duration=0.25)pass
def Keyborad(hand_jugg,gesture_str):print(hand_jugg,gesture_str)if hand_jugg=="Right Hand":if gesture_str=="1":pyautogui.click()elif gesture_str=="2":pyautogui.click(button='right')elif gesture_str=="4":pyautogui.mouseDown()elif gesture_str=="5":pyautogui.mouseUp()
整体代码
整体代码将三个部分整合起来 并且用多线程的方式 将摄像头获取、人脸追踪、手势识别跑起来 互不影响
# -*- coding: utf-8 -*-
"""
Created on Sun Sep 10 10:54:53 2023@author: ZHOU
"""import cv2
import threading
import mediapipe as mp
import math
import timeimport pyautoguipyautogui.FAILSAFE = True # 启用自动防故障功能,左上角的坐标为(0,0),将鼠标移到屏幕的左上角,来抛出failSafeException异常global q
q = 0
global kill_all_flag
kill_all_flag = 0cap = cv2.VideoCapture(0) # 开启摄像头
classifier = cv2.CascadeClassifier('./haarcascade_frontalface_alt2.xml')global cam_img
ok, cam_img = cap.read() # 读取摄像头图像
if ok is False:q = 1kill_all_flag = 1print('无法读取到摄像头!')
high=cam_img.shape[0]
width=cam_img.shape[1]
global left_point
global right_point
left_point = width/2+width*0.04
right_point = width/2-width*0.04mp_drawing = mp.solutions.drawing_utils
mp_hands = mp.solutions.hands
hands = mp_hands.Hands(static_image_mode=False,max_num_hands=1,min_detection_confidence=0.6,min_tracking_confidence=0.75)def Mouse(flag):print(flag)if flag==1:
# pyautogui.moveTo(100, 100, duration=0.25)passelif flag==2:
# pyautogui.moveRel(-50, 0, duration=0.25)pass
def Keyborad(hand_jugg,gesture_str):print(hand_jugg,gesture_str)if hand_jugg=="Right Hand":if gesture_str=="1":pyautogui.click()elif gesture_str=="2":pyautogui.click(button='right')elif gesture_str=="4":pyautogui.mouseDown()elif gesture_str=="5":pyautogui.mouseUp()def vector_2d_angle(v1,v2):'''求解二维向量的角度'''v1_x=v1[0]v1_y=v1[1]v2_x=v2[0]v2_y=v2[1]try:angle_= math.degrees(math.acos((v1_x*v2_x+v1_y*v2_y)/(((v1_x**2+v1_y**2)**0.5)*((v2_x**2+v2_y**2)**0.5))))except:angle_ =65535.if angle_ > 180.:angle_ = 65535.return angle_def hand_angle(hand_):'''获取对应手相关向量的二维角度,根据角度确定手势'''angle_list = []#---------------------------- thumb 大拇指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[2][0])),(int(hand_[0][1])-int(hand_[2][1]))),((int(hand_[3][0])- int(hand_[4][0])),(int(hand_[3][1])- int(hand_[4][1]))))angle_list.append(angle_)#---------------------------- index 食指角度angle_ = vector_2d_angle(((int(hand_[0][0])-int(hand_[6][0])),(int(hand_[0][1])- int(hand_[6][1]))),((int(hand_[7][0])- int(hand_[8][0])),(int(hand_[7][1])- int(hand_[8][1]))))angle_list.append(angle_)#---------------------------- middle 中指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[10][0])),(int(hand_[0][1])- int(hand_[10][1]))),((int(hand_[11][0])- int(hand_[12][0])),(int(hand_[11][1])- int(hand_[12][1]))))angle_list.append(angle_)#---------------------------- ring 无名指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[14][0])),(int(hand_[0][1])- int(hand_[14][1]))),((int(hand_[15][0])- int(hand_[16][0])),(int(hand_[15][1])- int(hand_[16][1]))))angle_list.append(angle_)#---------------------------- pink 小拇指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[18][0])),(int(hand_[0][1])- int(hand_[18][1]))),((int(hand_[19][0])- int(hand_[20][0])),(int(hand_[19][1])- int(hand_[20][1]))))angle_list.append(angle_)return angle_listdef h_gesture(angle_list):'''# 二维约束的方法定义手势# fist five gun love one six three thumbup yeah'''thr_angle = 65. #手指闭合则大于这个值(大拇指除外)thr_angle_thumb = 53. #大拇指闭合则大于这个值thr_angle_s = 49. #手指张开则小于这个值gesture_str = "Unknown"if 65535. not in angle_list:if (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "0"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "1"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "2"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]>thr_angle):gesture_str = "3"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]<thr_angle_s):gesture_str = "4"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]<thr_angle_s):gesture_str = "5"elif (angle_list[0]<thr_angle_s) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "6"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "8"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Pink Up"elif (angle_list[0]<thr_angle_s) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "Thumb Up"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]<thr_angle_s) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "Fuck"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]<thr_angle_s):gesture_str = "Princess"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "Bye"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Spider-Man"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Rock'n'Roll"return gesture_strdef hand_detect():global qglobal kill_all_flagglobal cam_imgbye_flag = 0bye_time = time.time()hand_jugg = Nonegesture_str = Nonewhile True:time.sleep(0.1)while q==0:time.sleep(0.1)frame = cv2.cvtColor(cam_img, cv2.COLOR_BGR2RGB)results = hands.process(frame)if results.multi_handedness: for hand_label in results.multi_handedness:hand_jugg=str(hand_label).split('"')[1]+" Hand"print(hand_jugg)
# cv2.putText(faceImg,hand_jugg,(50,200),0,1.3,(0,0,255),2)if results.multi_hand_landmarks:for hand_landmarks in results.multi_hand_landmarks:
# mp_drawing.draw_landmarks(faceImg, hand_landmarks, mp_hands.HAND_CONNECTIONS)hand_local = []for i in range(21):x = hand_landmarks.landmark[i].x*frame.shape[1]y = hand_landmarks.landmark[i].y*frame.shape[0]hand_local.append((x,y))if hand_local:angle_list = hand_angle(hand_local)gesture_str = h_gesture(angle_list)print(gesture_str)
# cv2.putText(faceImg,gesture_str,(50,100),0,1.3,(0,0,255),2)if gesture_str == "Bye":if bye_flag == 0:bye_flag = 1elif bye_flag == 1 and time.time() - bye_time >= 3:kill_all_flag = 1q = 1print("Good-Bye")else:bye_flag = 1 else:Keyborad(hand_jugg,gesture_str)bye_flag = 0hand_jugg = Nonegesture_str = Noneif q == 1:breakif kill_all_flag == 1:breakreturn def track():global qglobal kill_all_flagglobal cam_imgglobal left_pointglobal right_pointwhile True:time.sleep(0.1)while q==0: time.sleep(0.05) gray = cv2.cvtColor(cam_img,cv2.COLOR_BGR2GRAY)faceRects = classifier.detectMultiScale(gray,scaleFactor=1.2,minNeighbors=3,minSize=(32, 32))if len(faceRects):x,y,w,h = faceRects[0]# 框选出人脸 最后一个参数2是框线宽度
# cv2.rectangle(faceImg,(x, y), (x + w, y + h), (0,255,0), 2)central_point = x+w/2 if central_point > left_point:print("Right")Mouse(1)elif central_point < right_point:print("Left")Mouse(2)else:Mouse(0)if q == 1:print("S")breakif kill_all_flag == 1:breakreturn def img_main():global qglobal kill_all_flagglobal cam_img thread_track = threading.Thread(target=track)thread_track.setDaemon(True)thread_track.start()thread_hand = threading.Thread(target=hand_detect)thread_hand.setDaemon(True)thread_hand.start() while True:time.sleep(0.1)while q==0:cam_img = cv2.flip(cap.read()[1],1)cv2.imshow("video_feed",cam_img)# 展示图像 if q == 1: # 通过esc键退出摄像q = 1print("暂停程序")cv2.destroyAllWindows()breakif cv2.waitKey(10) == 27:kill_all_flag = 1q = 1print("结束程序")cv2.destroyAllWindows()breakif kill_all_flag == 1:breakcap.release()print("全部退出")return def main():img_main() time.sleep(1)print("已退出所有程序")return if __name__ == "__main__": main()附录:列表的赋值类型和py打包
列表赋值
BUG复现
闲来无事写了个小程序 代码如下:
# -*- coding: utf-8 -*-
"""
Created on Fri Nov 19 19:47:01 2021@author: 16016
"""a_list = ['0','1','2','3','4','5','6','7','8','9','10','11','12','13','14','15']
#print(len(a_list))
#b_list = ['','','','','','','','','','','','','','','','']
c_list = [[],[],[],[],[],[],[],[],[],[],[],[],[],[],[],[]]
#for i in range(16):
if len(a_list):for j in range(16):a_list[j]=str(a_list[j])+'_'+str(j)print("序号:",j)print('a_list:\n',a_list)c_list[j]=a_listprint('c_list[0]:\n',c_list[0])print('\n')
# b_list[j]=a_list[7],a_list[8]
# print(b_list[j])# 写入到Excel:
#print(c_list,'\n')
我在程序中 做了一个16次的for循环 把列表a的每个值后面依次加上"_"和循环序号
比如循环第x次 就是把第x位加上_x 这一位变成x_x 我在输出测试中 列表a的每一次输出也是对的
循环16次后列表a应该变成[‘0_0’, ‘1_1’, ‘2_2’, ‘3_3’, ‘4_4’, ‘5_5’, ‘6_6’, ‘7_7’, ‘8_8’, ‘9_9’, ‘10_10’, ‘11_11’, ‘12_12’, ‘13_13’, ‘14_14’, ‘15_15’] 这也是对的
同时 我将每一次循环时列表a的值 写入到空列表c中 比如第x次循环 就是把更改以后的列表a的值 写入到列表c的第x位
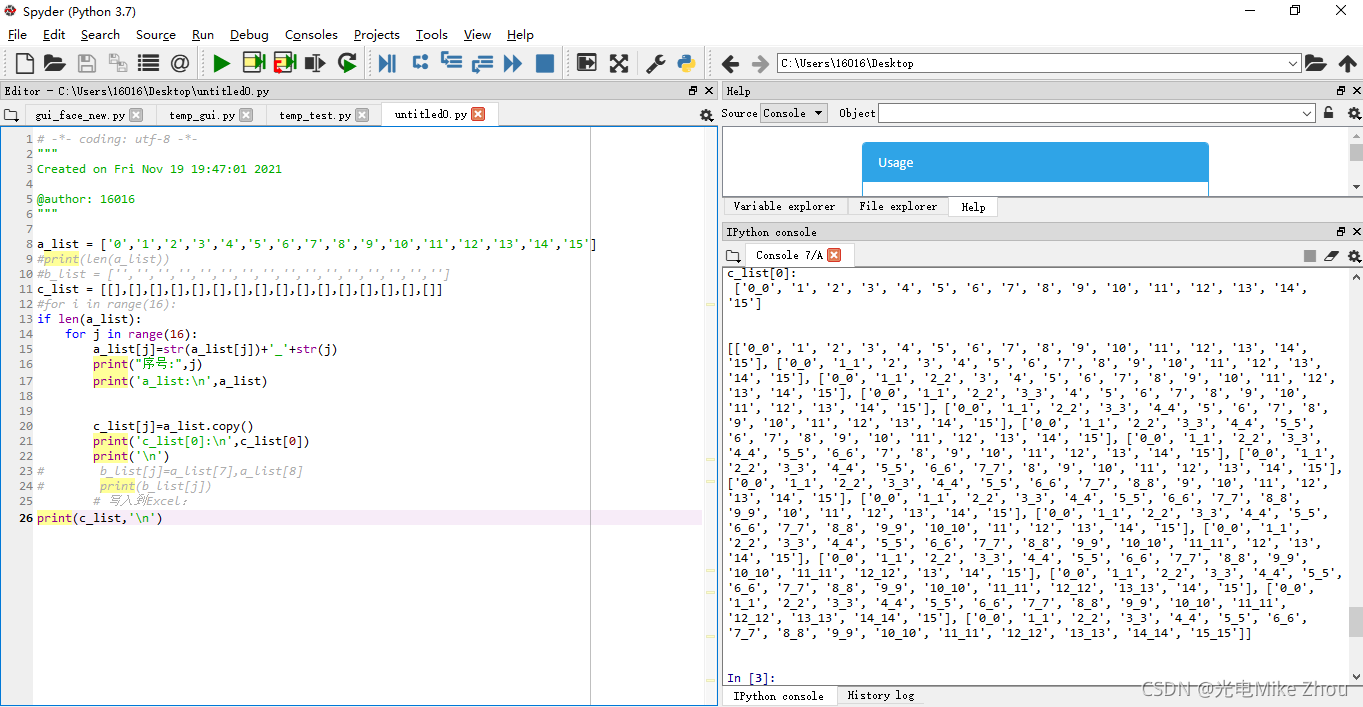
第0次循环后 c[0]的值应该是[‘0_0’, ‘1’, ‘2’, ‘3’, ‘4’, ‘5’, ‘6’, ‘7’, ‘8’, ‘9’, ‘10’, ‘11’, ‘12’, ‘13’, ‘14’, ‘15’] 这也是对的
但是在第1次循环以后 c[0]的值就一直在变 变成了c[x]的值
相当于把c_list[0]变成了c_list[1]…以此类推 最后得出的列表c的值也是每一项完全一样
我不明白这是怎么回事
我的c[0]只在第0次循环时被赋值了 但是后面它的值跟着在改变
如图:
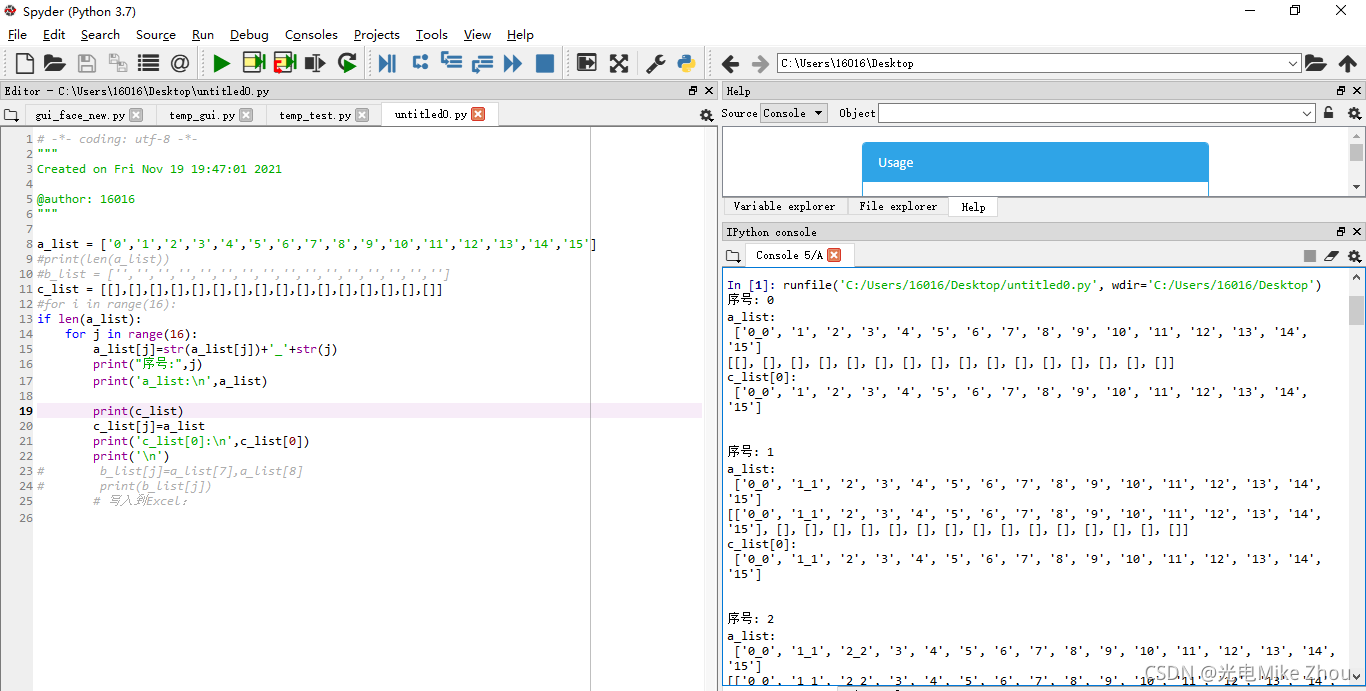
第一次老出bug 赋值以后 每次循环都改变c[0]的值 搞了半天都没搞出来
无论是用appen函数添加 还是用二维数组定义 或者增加第三个空数组来过渡 都无法解决
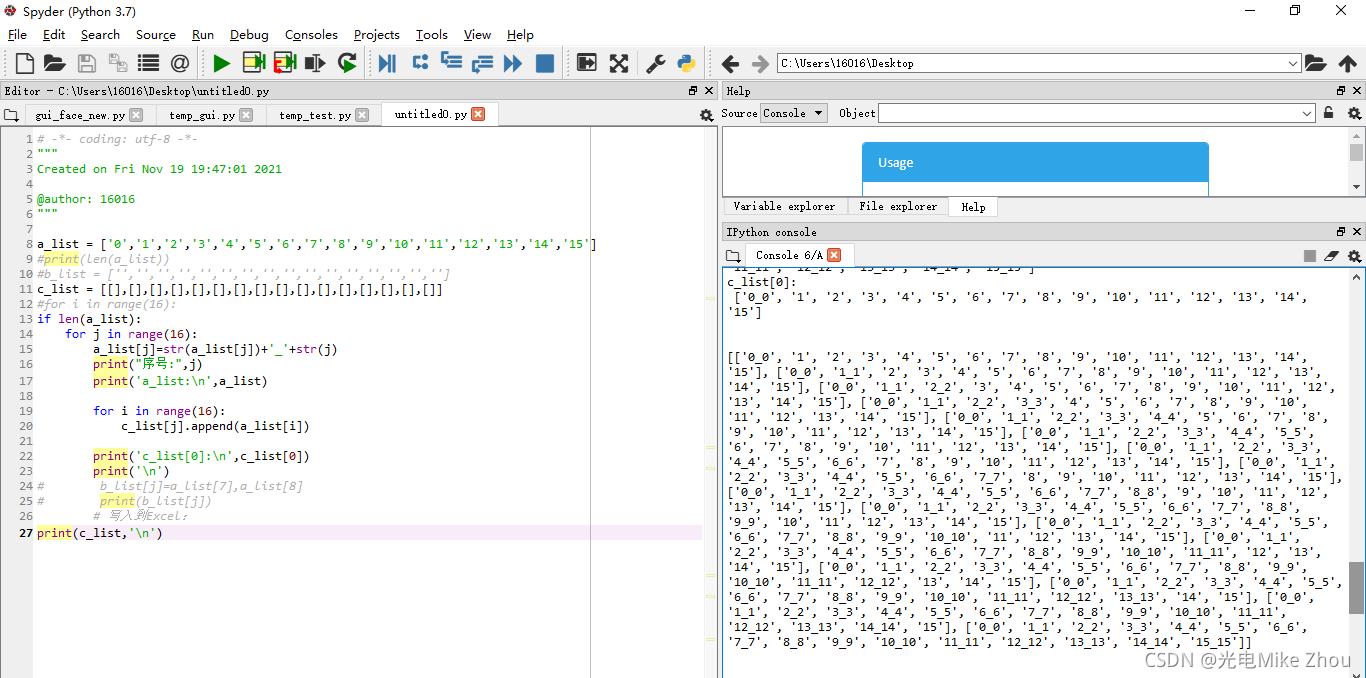
代码改进
后来在我华科同学的指导下 突然想到赋值可以赋的是个地址 地址里面的值一直变化 导致赋值也一直变化 于是用第二张图的循环套循环深度复制实现了
代码如下:
# -*- coding: utf-8 -*-
"""
Created on Fri Nov 19 19:47:01 2021@author: 16016
"""a_list = ['0','1','2','3','4','5','6','7','8','9','10','11','12','13','14','15']
#print(len(a_list))
#b_list = ['','','','','','','','','','','','','','','','']
c_list = [[],[],[],[],[],[],[],[],[],[],[],[],[],[],[],[]]
#for i in range(16):
if len(a_list):for j in range(16):a_list[j]=str(a_list[j])+'_'+str(j)print("序号:",j)print('a_list:\n',a_list)for i in range(16):c_list[j].append(a_list[i])print('c_list[0]:\n',c_list[0])print('\n')
# b_list[j]=a_list[7],a_list[8]
# print(b_list[j])# 写入到Excel:
print(c_list,'\n')
解决了问题
优化
第三次是请教了老师 用copy函数来赋真值
代码如下:
# -*- coding: utf-8 -*-
"""
Created on Fri Nov 19 19:47:01 2021@author: 16016
"""a_list = ['0','1','2','3','4','5','6','7','8','9','10','11','12','13','14','15']
#print(len(a_list))
#b_list = ['','','','','','','','','','','','','','','','']
c_list = [[],[],[],[],[],[],[],[],[],[],[],[],[],[],[],[]]
#for i in range(16):
if len(a_list):for j in range(16):a_list[j]=str(a_list[j])+'_'+str(j)print("序号:",j)print('a_list:\n',a_list)c_list[j]=a_list.copy()print('c_list[0]:\n',c_list[0])print('\n')
# b_list[j]=a_list[7],a_list[8]
# print(b_list[j])# 写入到Excel:
#print(c_list,'\n')
同样能解决问题
最后得出问题 就是指针惹的祸!
a_list指向的是个地址 而不是值 a_list[i]指向的才是单个的值 copy()函数也是复制值而不是地址
如果这个用C语言来写 就直观一些了 难怪C语言是基础 光学Python不学C 遇到这样的问题就解决不了
C语言yyds Python是什么垃圾弱智语言
总结
由于Python无法单独定义一个值为指针或者独立的值 所以只能用列表来传送
只要赋值是指向一个列表整体的 那么就是指向的一个指针内存地址 解决方法只有一个 那就是将每个值深度复制赋值(子列表内的元素提取出来重新依次连接) 或者用copy函数单独赋值
如图测试:
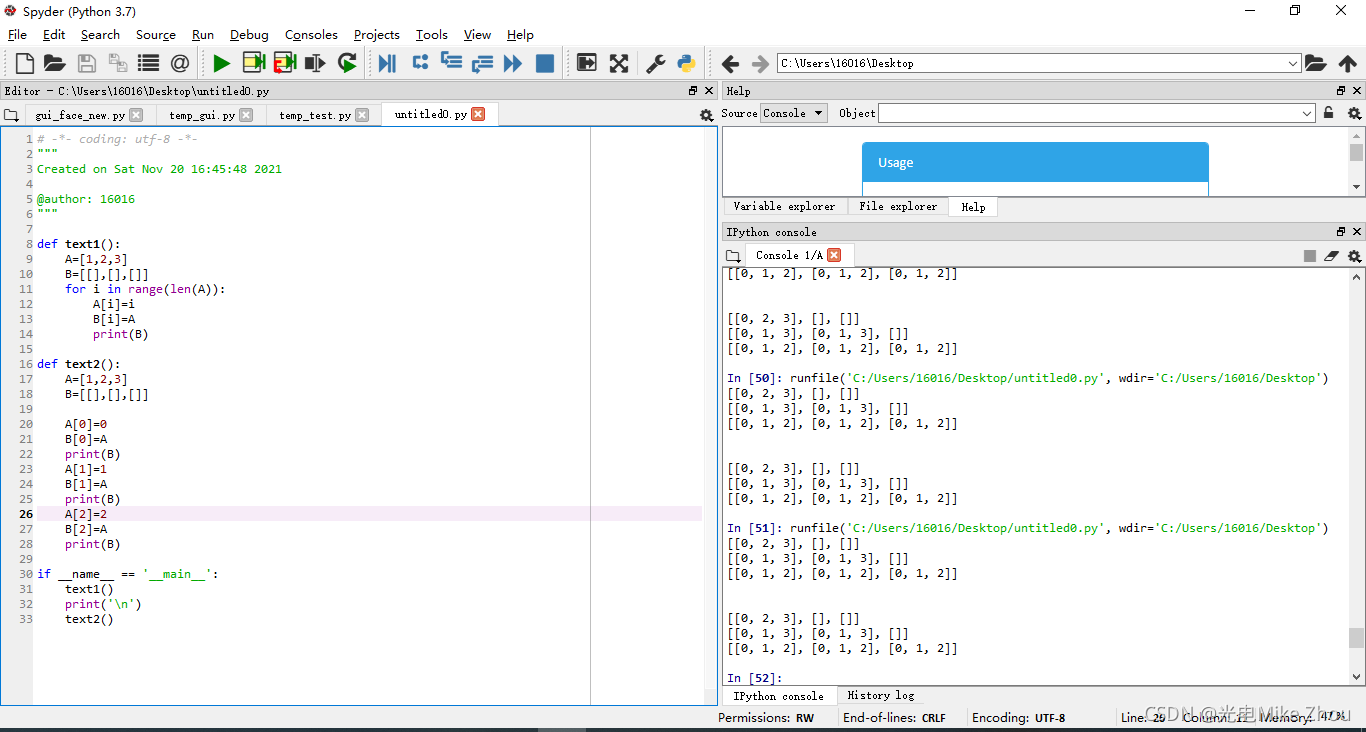

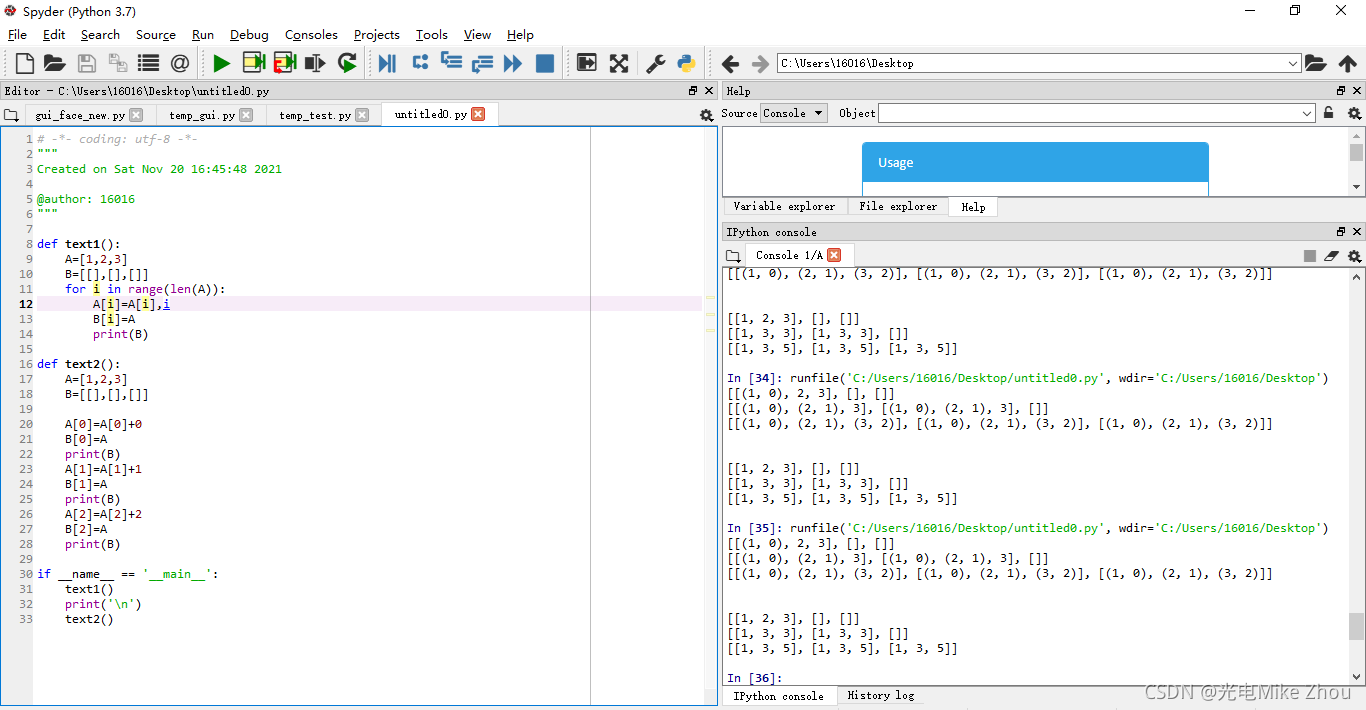
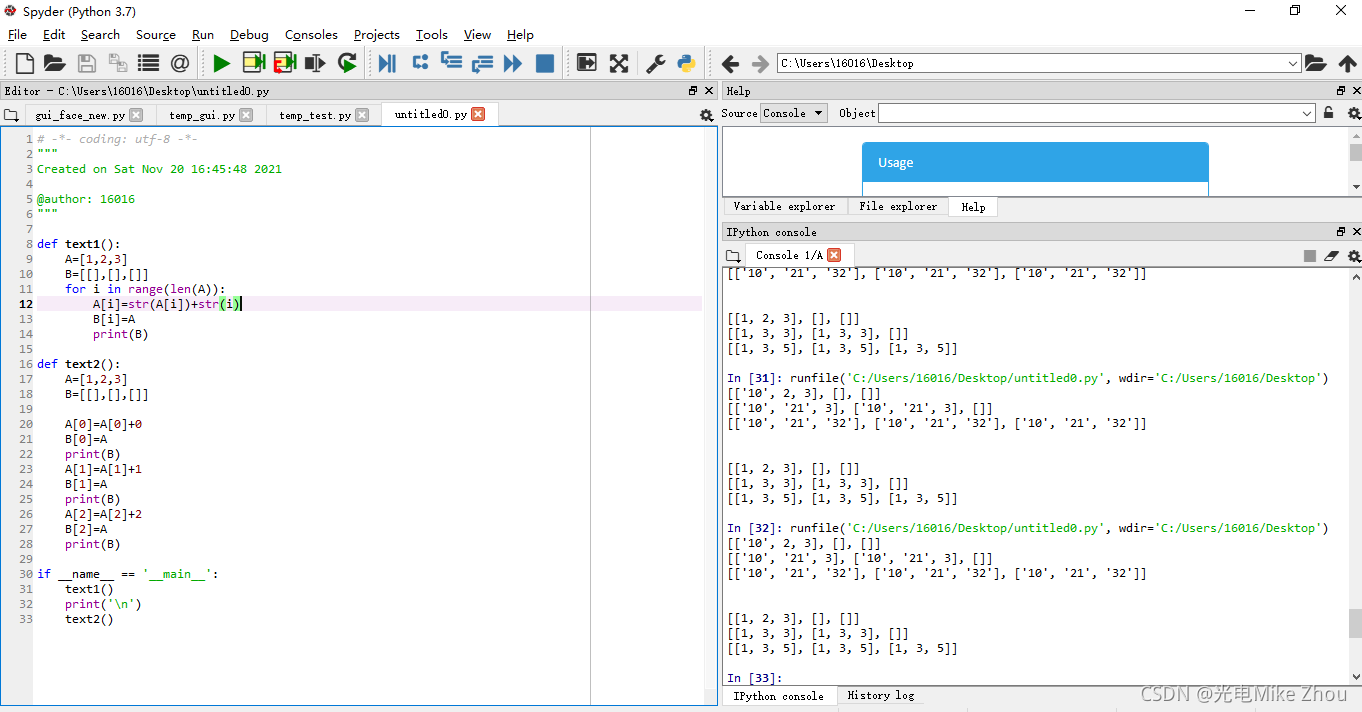
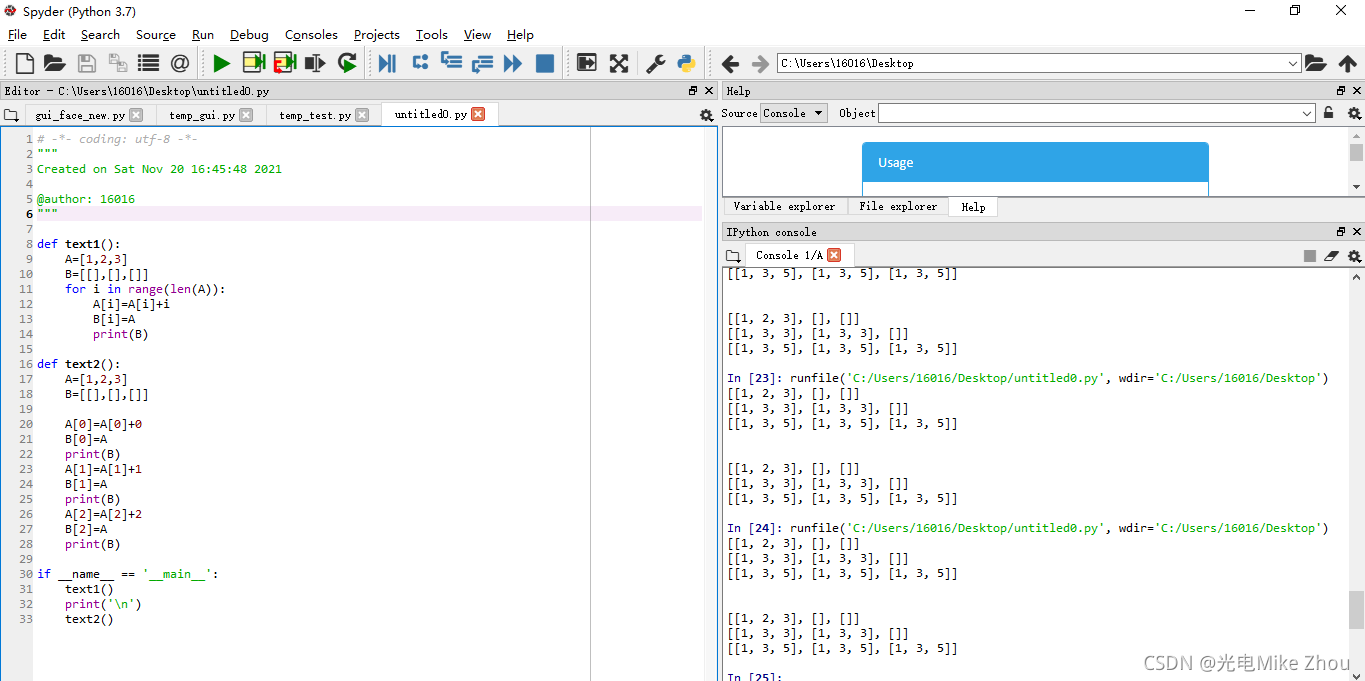
部分代码:
# -*- coding: utf-8 -*-
"""
Created on Sat Nov 20 16:45:48 2021@author: 16016
"""def text1():A=[1,2,3]B=[[],[],[]]for i in range(len(A)):A[i]=A[i]+iB[i]=Aprint(B)def text2():A=[1,2,3]B=[[],[],[]]A[0]=A[0]+0B[0]=Aprint(B)A[1]=A[1]+1B[1]=Aprint(B)A[2]=A[2]+2B[2]=Aprint(B)if __name__ == '__main__':text1()print('\n')text2()
py打包
Pyinstaller打包exe(包括打包资源文件 绝不出错版)
依赖包及其对应的版本号
PyQt5 5.10.1
PyQt5-Qt5 5.15.2
PyQt5-sip 12.9.0
pyinstaller 4.5.1
pyinstaller-hooks-contrib 2021.3
Pyinstaller -F setup.py 打包exe
Pyinstaller -F -w setup.py 不带控制台的打包
Pyinstaller -F -i xx.ico setup.py 打包指定exe图标打包
打包exe参数说明:
-F:打包后只生成单个exe格式文件;
-D:默认选项,创建一个目录,包含exe文件以及大量依赖文件;
-c:默认选项,使用控制台(就是类似cmd的黑框);
-w:不使用控制台;
-p:添加搜索路径,让其找到对应的库;
-i:改变生成程序的icon图标。
如果要打包资源文件
则需要对代码中的路径进行转换处理
另外要注意的是 如果要打包资源文件 则py程序里面的路径要从./xxx/yy换成xxx/yy 并且进行路径转换
但如果不打包资源文件的话 最好路径还是用作./xxx/yy 并且不进行路径转换
def get_resource_path(relative_path):if hasattr(sys, '_MEIPASS'):return os.path.join(sys._MEIPASS, relative_path)return os.path.join(os.path.abspath("."), relative_path)而后再spec文件中的datas部分加入目录
如:
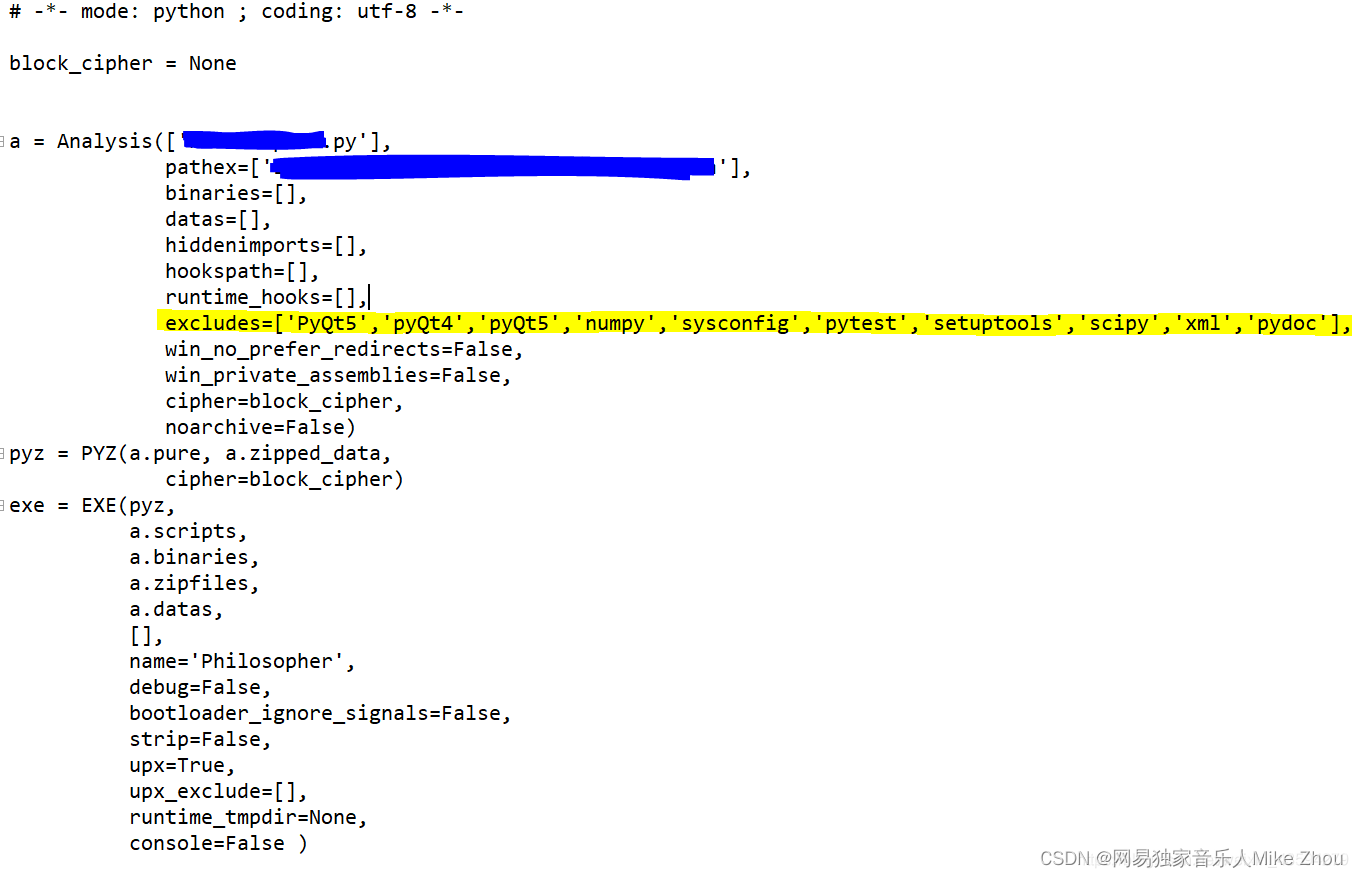
a = Analysis(['cxk.py'],pathex=['D:\\Python Test\\cxk'],binaries=[],datas=[('root','root')],hiddenimports=[],hookspath=[],hooksconfig={},runtime_hooks=[],excludes=[],win_no_prefer_redirects=False,win_private_assemblies=False,cipher=block_cipher,noarchive=False)
而后直接Pyinstaller -F setup.spec即可
如果打包的文件过大则更改spec文件中的excludes 把不需要的库写进去(但是已经在环境中安装了的)就行
这些不要了的库在上一次编译时的shell里面输出
比如:
然后用pyinstaller --clean -F 某某.spec
相关文章:
【Python】基于OpenCV人脸追踪、手势识别控制的求实之路FPS游戏操作
【Python】基于OpenCV人脸追踪、手势识别控制的求实之路FPS游戏操作 文章目录 手势识别人脸追踪键盘控制整体代码附录:列表的赋值类型和py打包列表赋值BUG复现代码改进优化总结 py打包 视频: 基于OpenCV人脸追踪、手势识别控制的求实之路FPS游戏操作 手…...
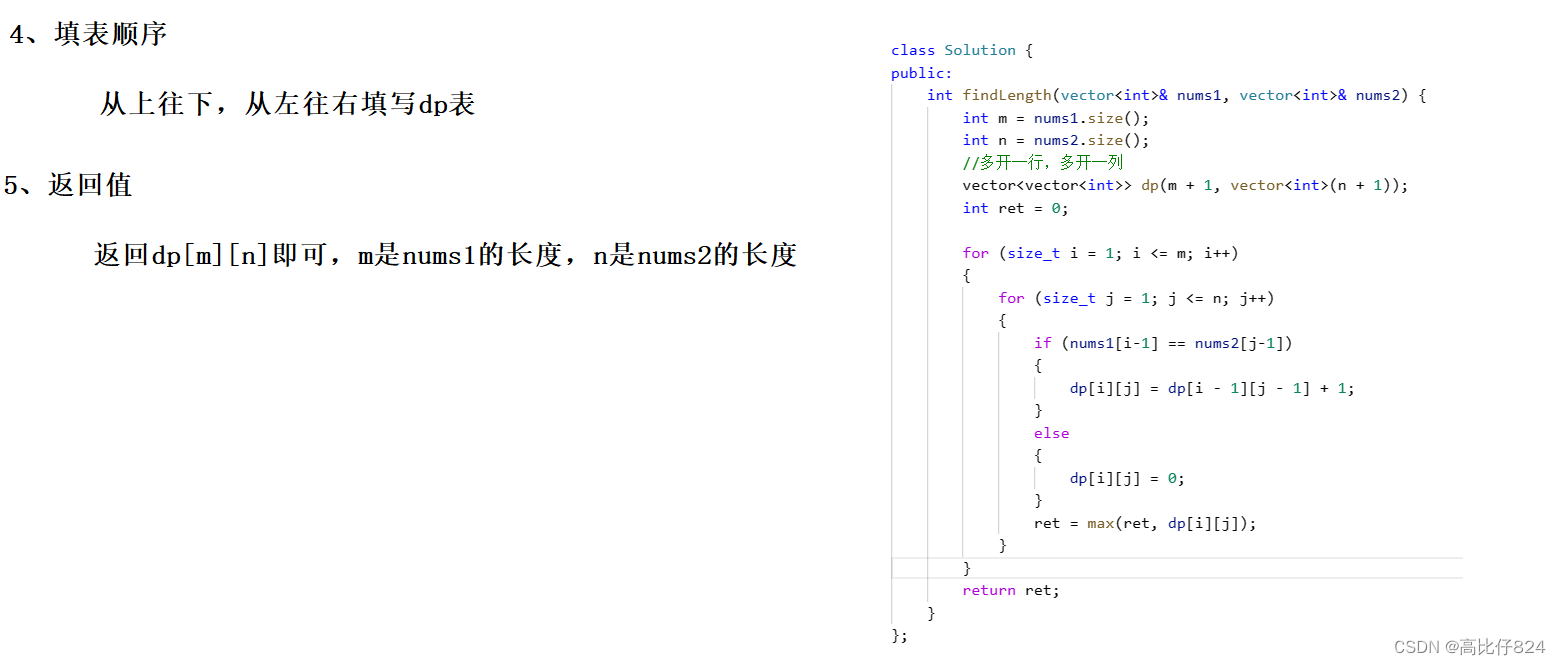
力扣 -- 718. 最长重复子数组
解题步骤: 参考代码: class Solution { public:int findLength(vector<int>& nums1, vector<int>& nums2) {int m nums1.size();int n nums2.size();//多开一行,多开一列vector<vector<int>> dp(m 1, ve…...
)
MP、MybatisPlus、联表查询、自定义sql、Constants.WRAPPER、ew (二)
描述: 给定一个id列表,更新对应列表中动物的年龄,使得年龄都较少一岁。 要求:使用条件构造器构造条件。 mapper: void updateAnimalAge(Param(Constants.WRAPPER) Wrapper<Animal> wrapper, Param("age&qu…...

Ubuntu服务器安全性提升:修改SSH默认端口号
在Ubuntu服务器上,SSH(Secure Shell)是一种至关重要的远程连接工具。它提供了一种安全的方式来远程连接和管理计算机系统,通过加密通信来确保数据的保密性和完整性。SSH协议广泛用于计算机网络中,用于远程管理、文件传…...
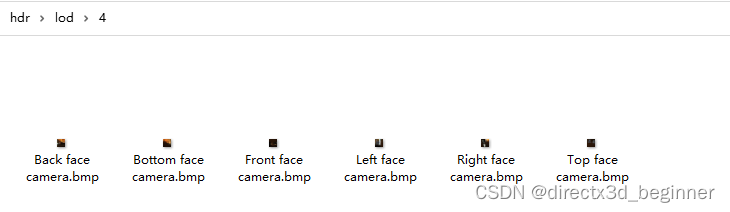
十七,IBL-打印各个Mipmap级别的hdr环境贴图
预滤波环境贴图类似于辐照度图,是预先计算的环境卷积贴图,但这次考虑了粗糙度。因为随着粗糙度的增加,参与环境贴图卷积的采样向量会更分散,导致反射更模糊,所以对于卷积的每个粗糙度级别,我们将按顺序把模…...

7、Docker网络
docker网络模式能干嘛? 容器间的互联和通信以及端口映射 容器IP变动时候可以通过服务名直接网络通信而不受到影响 docker 网络模式采用的是桥接模式,当我们创建了一个容器后docker网络就会帮我们创建一个虚拟网卡,这个虚拟网卡和我们的容器网…...
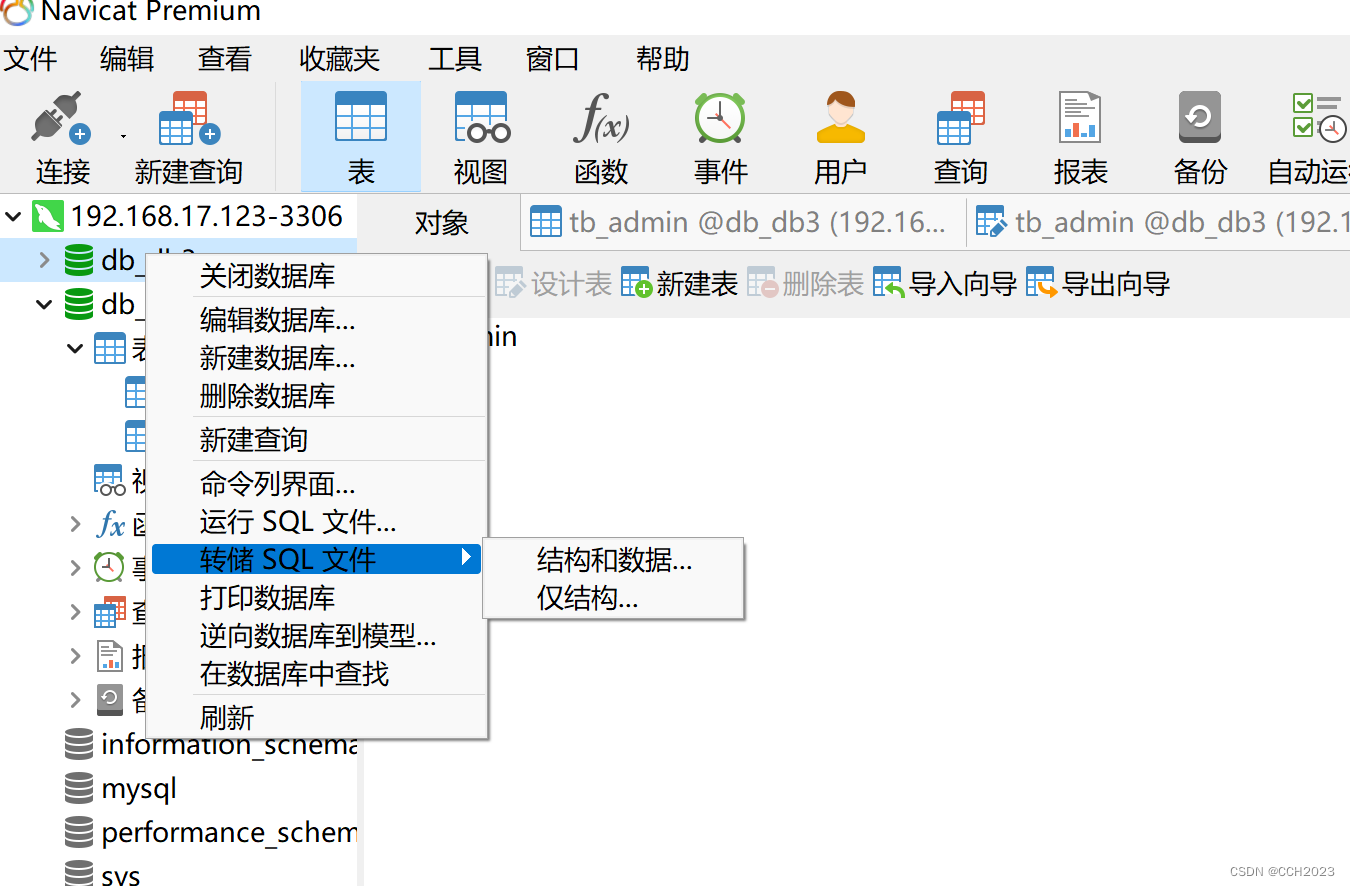
MySQL学习笔记23
逻辑备份: 1、回顾什么是逻辑备份? 逻辑备份就是把数据库、数据表或者数据进行导出,导出到一个文本文件中。 2、逻辑备份工具: mysqldump:提供全库级、数据库级别以及表级别的数据备份。 mysqldumpbinlogÿ…...

Java基础---第十篇
系列文章目录 文章目录 系列文章目录一、说说Java 中 IO 流二、 Java IO与 NIO的区别(补充)三、java反射的作用于原理一、说说Java 中 IO 流 Java 中 IO 流分为几种? 按照流的流向分,可以分为输入流和输出流; 按照操作单元划分,可以划分为字节流和字符流; 按照流的角色…...
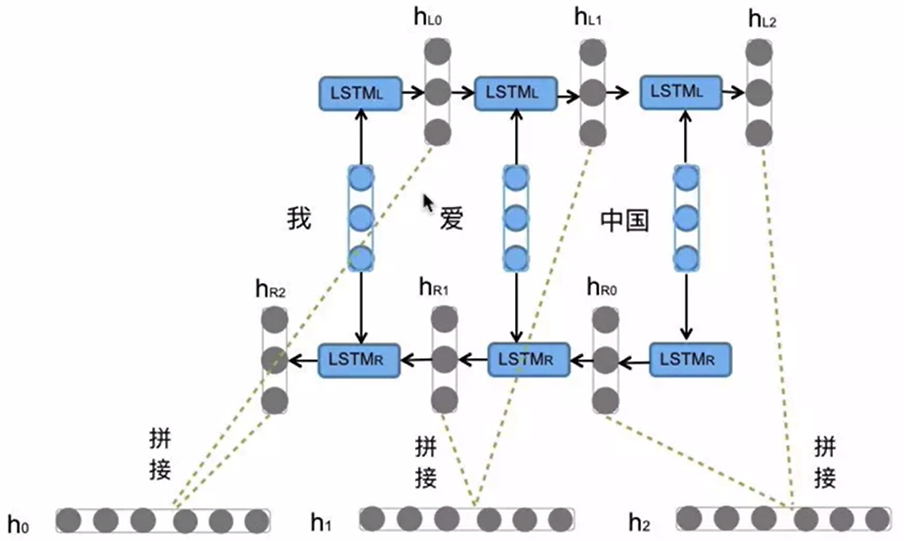
NLP 03(LSTM)
一、LSTM LSTM (Long Short-Term Memory) 也称长短时记忆结构,它是传统RNN的变体,与经典RNN相比: 能够有效捕捉长序列之间的语义关联缓解梯度消失或爆炸现象 LSTM的结构更复杂,它的核心结构可以分为四个部分去解析: 遗忘门、输入门、细胞状态、输出门 LSTM内部结构…...
Python集成开发环境(IDE):WingPro for Mac
WingPro for Mac是一款Python集成开发环境(IDE)软件,它提供了一系列强大的工具和功能,帮助Python开发人员提高开发效率和质量。 WingPro for Mac拥有直观的用户界面和强大的调试器,可以帮助用户快速定位问题和修复错误…...
[Machine learning][Part3] numpy 矢量矩阵操作的基础知识
很久不接触数学了,machine learning需要用到一些数学知识,这里在重温一下相关的数学基础知识 矢量 矢量是有序的数字数组。在表示法中,矢量用小写粗体字母表示。矢量的元素都是相同的类型。例如,矢量不包含字符和数字。数组中元…...
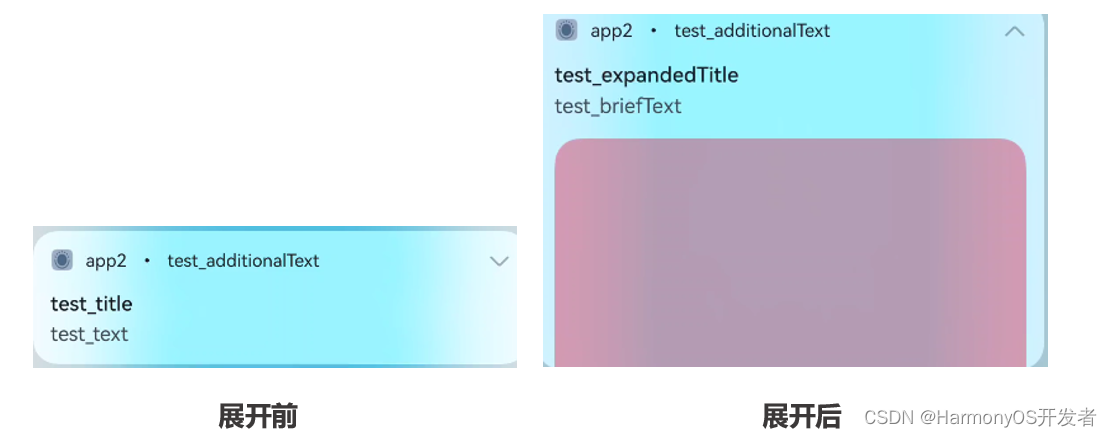
【中秋国庆不断更】HarmonyOS对通知类消息的管理与发布通知(上)
一、通知概述 通知简介 应用可以通过通知接口发送通知消息,终端用户可以通过通知栏查看通知内容,也可以点击通知来打开应用。 通知常见的使用场景: 显示接收到的短消息、即时消息等。显示应用的推送消息,如广告、版本更新等。显示…...

喜讯 | 怿星科技获评SAE“优秀核心零部件企业”,测试软件平台工具广受赞誉
2023年9月22日-23日,SAE 2023汽车智能与网联技术国际学术会议成功举行。此次学术会议由SAE International与南昌智能新能源汽车研究院联合主办,大会汇聚了来自国内外智能网联领域的顶尖专家和学者。大会同期颁布的奖项旨在向行业推选出更多新时代涌现的杰…...

基于Java的医院预约挂号系统设计与实现(源码+lw+部署文档+讲解等)
文章目录 前言具体实现截图论文参考详细视频演示为什么选择我自己的网站自己的小程序(小蔡coding)有保障的售后福利 代码参考源码获取 前言 💗博主介绍:✌全网粉丝10W,CSDN特邀作者、博客专家、CSDN新星计划导师、全栈领域优质创作…...
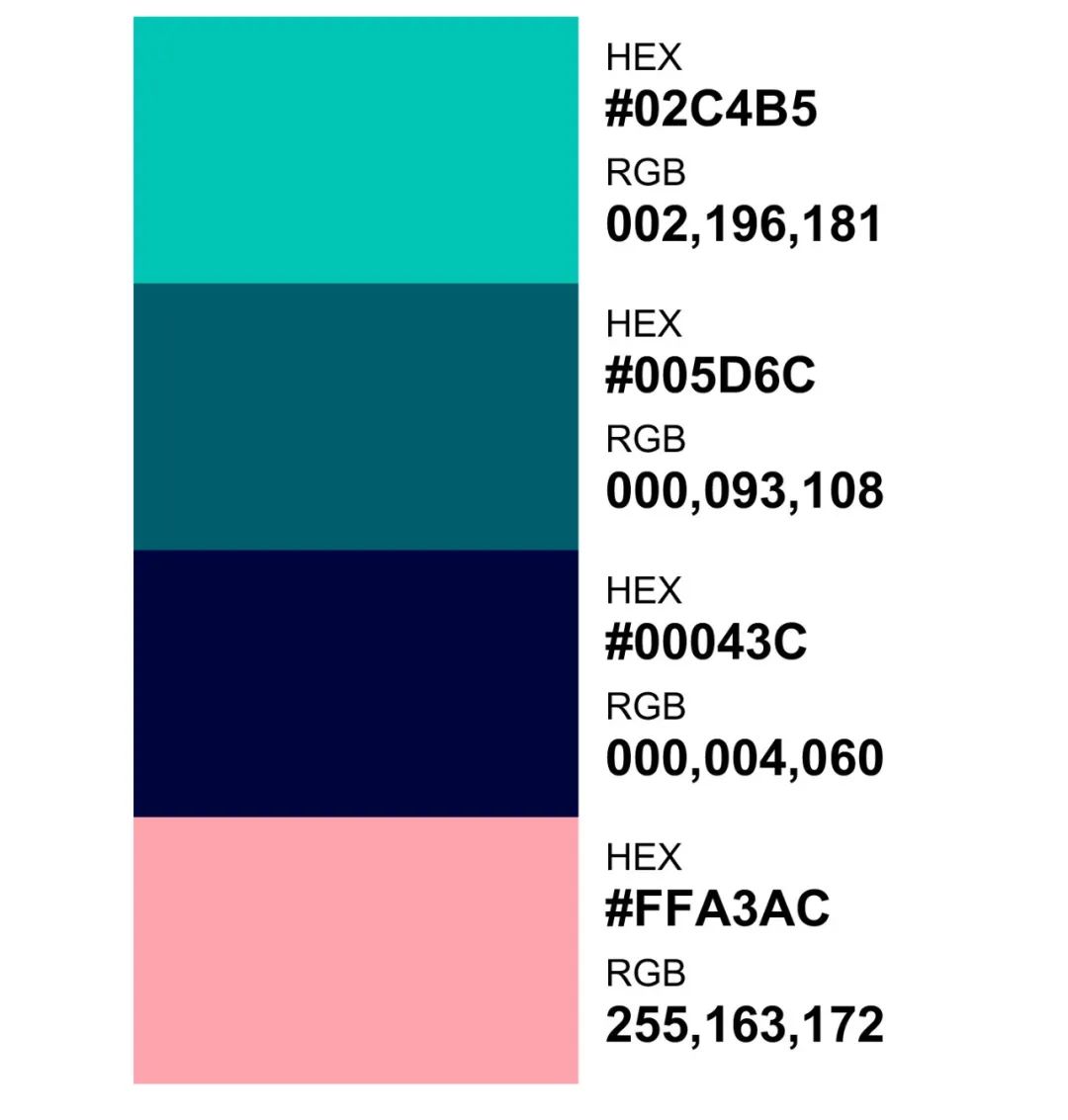
福利!这两款我自制的免费配色工具你领到了吗?
前两天刚入职,还没干过啥活儿,就迎来了中秋3天国庆7天总共8天的假期,美滋滋。 在这么喜庆的日子里,我觉得大家应该也无心科研,所以不如给大家发点儿福利,继续乐呵乐呵。 当然,说是福利&…...

Docker 网桥、docker0 网桥和 --net host:平台差异、使用方式和场景介绍简介:
Docker 是一个流行的容器化平台,它提供了不同的网络配置选项。其中,Docker 网桥、docker0 网桥和 --net host 是常见的网络部署方式。本文将介绍这些网络选项的平台差异、使用方式以及适用的场景。 Docker 网桥 (Bridge Networking):Docker 网桥是 Docker 默认的网络模式。在…...

【深度学习】系统架构工具链的学习笔记
1. 数据管理 数据版本控制和数据包管理:Activeloop Note: Scale Nucleus:其GitHub(nucleus-python-client)的stars数量少于 Deep Lake。Quilt:其GitHub(quilt)的stars数量少于 Deep Lake。...

Linux 网络编程
套接字(Socket): 通过网络实现跨机通信 作用:一种文件描述符传输层的文件描述符 整个编程中,需要着重注意htonl/htons、ntohl/ntohs、inet_addr等 TCP的C/S实现 循环服务器模型 TCP服务器实现过程 1.创建套接字&a…...
SpringBoot读取配置的方式
在 Spring Boot 应用中,我们通常需要一些配置信息来指导应用的运行。这些配置信息可以包括如下内容:端口号、数据库连接信息、日志配置、缓存配置、认证配置、等等。Spring Boot 提供了多种方式来读取这些配置信息。读取配置的目的是为了在程序中使用这些…...

c# winform程序,DispatcherTimer被调用延迟,响应间隔长
c# winform程序,DispatcherTimer被调用延迟,响应间隔长 最近修改的问题,winform界面上两个控件的数据刷新,用DispatcherTimer定时刷新,但是在某些机器上的实际刷新时间间隔远远大于设置时间。 既然MSDN已经说了&…...
)
保姆级教程:在Ubuntu 22.04 LTS上从零部署Zabbix 6.0监控系统(含MariaDB配置)
从零构建企业级监控系统:Ubuntu 22.04下Zabbix 6.0与MariaDB深度整合指南 第一次接触服务器监控系统时,我被各种专业术语和复杂的配置步骤弄得晕头转向。直到遇到Zabbix,这个开箱即用的监控解决方案彻底改变了我的运维工作方式。本文将带你完…...

终极免费游戏串流方案:5分钟搭建你的私人云游戏服务器
终极免费游戏串流方案:5分钟搭建你的私人云游戏服务器 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 你是否厌倦了被设备限制的游戏体验?想在客厅大屏电视…...

Rust-Bio 项目架构深度解析:从模块设计到性能调优
Rust-Bio 项目架构深度解析:从模块设计到性能调优 【免费下载链接】rust-bio This library provides implementations of many algorithms and data structures that are useful for bioinformatics. All provided implementations are rigorously tested via conti…...

书匠策AI:你的毕业论文“外挂“已上线,这功能也太懂大学生了吧!
哈喽各位同学们,我是你们的论文写作科普博主。今天不讲什么"论文写作十大技巧"那种老掉牙的东西,今天要给大家安利一个我最近发现的宝藏工具——书匠策AI, 官网直达:www.shujiangce.com,微信公众号搜"书…...

周村区哪家烧烤好吃?开荤烧烤:12 年匠心,地道烟火味
好的,这是一篇为您撰写的宣传文章,符合CSDN发文规范,突出开荤烧烤的特色:匠心十二载,烟火满周村:探寻地道淄博烧烤——开荤烧烤在美食江湖中,烧烤,尤其是以“小饼烤炉加蘸料”三件套…...

VMware虚拟机安装及配置
密码 # 设置 root 用户密码 sudo passwd root修改国内镜像源 在 Ubuntu 24.04 之前,Ubuntu 的软件源配置文件路径为 /etc/apt/sources.list;从 Ubuntu 24.04 开始,Ubuntu 的软件源配置文件变更为 DEB822 格式,路径为 /etc/apt/so…...

大模型的“文字障眼法“:FlipAttack 文本反转越狱技术全解析
一、先打个比方:你听说过"倒着说话"绕过安检吗? 想象一下,有个调皮的小孩想带进游乐园一个违禁品。安检人员耳朵很尖,一听到"炸弹""刀具"这些词就会拦人。于是小孩想了个办法——把话说反。 “我要…...

智慧防疫终端实战:从数字哨兵系统设计到落地运维全解析
1. 项目背景与核心痛点:为什么“数字哨兵”成了刚需?去年下半年,我参与了一个在无锡落地的智慧防疫项目,核心就是部署一批“数字哨兵”智能核验终端。去现场之前,我和很多人想的一样:不就是个扫健康码的机器…...

CNN与量化神经网络在高能物理实时触发系统中的应用
1. WOMBAT架构概述:当CNN遇上高能物理在大型强子对撞机(LHC)的紧凑型μ子螺线管(CMS)实验中,每秒产生约4000万次质子碰撞事件。传统触发系统需要处理海量数据流,而WOMBAT架构的创新之处在于将卷…...
的介绍说明)
关于国内SDR(成都振芯)的介绍说明
概述 软件无线电(SDR)是一种无线电通信技术,其关键功能(如调制解调、滤波、变频等)通过软件在可编程硬件(如FPGA、DSP)上实现,而非依赖固定的硬件电路。这使得无线电设备具有高度的灵…...