【QT开发(6)】0926-QT 中加入 fastDDS 通信库的程序使用说明
在智能驾驶中,DDS有可能被广泛使用,因此推出这篇说明教程。
1、基于【QT开发(5)】教程的项目文档进行开发
2、安装DDS
查看《【eProsima Fast DDS(1)】安装eProsima Fast DDS》
至少安装:
foonathan_memory_vendor,一个 STL 兼容的 C++ 内存分配器 库。
fastcdr,一个根据 CDR 标准进行数据序列化的 C++ 库。
fastrtps,eProsima Fast DDS库的核心库。
测试安装是否正确的方法:在cmakelists 中加入
find_package(fastcdr REQUIRED)
find_package(foonathan_memory REQUIRED)
find_package(fastrtps REQUIRED)
如果cmake 提示找到了该库,则表示库ok。
3、在项目中添加通信message文件
我们一般是先写 DDS 的idl 文件(本质是定义定义数据结构体类型),然后通过DDS的代码生成工具生成 cpp 和hpp文件。如下图:
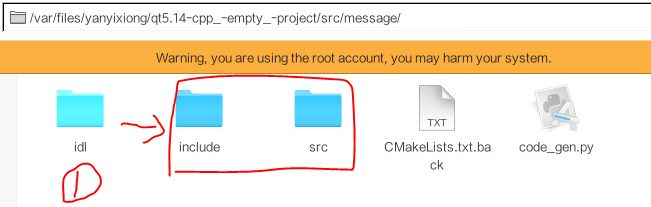
因为我们使用的【QT开发(5)】教程的项目文档进行开发,哪个项目直接遍历src 目录里面全部的cpp和hpp文件。因此我们把message 复制进入src目录即可,不用变更cmakelists
例如我们定义两个数据结构体PerceptionCommand 和WorkingStatus
module auto_msg {module msg {struct PerceptionCommand {uint64 time_stamp;uint8 system_command;uint8 system_reset;};};
};
module auto_msg {module msg {struct WorkingStatus {uint64 time_stamp;uint32 counter;};};
};
4、为了保持ROS2 代码的风格兼容,我们导入了rclcpp
目的:移植rclcpp 的publisher、subscription、和timer
因为我们使用的【QT开发(5)】教程的项目文档进行开发,哪个项目直接遍历src 目录里面全部的cpp和hpp文件。因此我们把rclcpp复制进入src目录即可,不用变更cmakelists
5、修改cmakelists 增加fastrtps
增加
find_package(fastcdr REQUIRED)
find_package(foonathan_memory REQUIRED)
find_package(fastrtps REQUIRED)修改target_link_libraries ,增加fastrtps
target_link_libraries( emptyApp fmtQt5::Widgets${OpenCV_LIBS}fastrtpspthread)
因为我们使用的【QT开发(5)】教程的项目文档进行开发,哪个项目直接遍历src 目录里面全部的cpp和hpp文件。因此我们把message 、rclcpp复制进入src目录即可,不用变更cmakelists
6、增加一个基于DDS 通信的核心功能
我们建立一个example文件夹,建立example.cpp 和 example.hpp
先写 example.hpp,首先引入头文件
#include <rclcpp/rclcpp.hpp>
#include <PerceptionCommand.hpp> // 这个是message 里面定义的 dds 通信数据结构体
#include <WorkingStatus.hpp> // 这个是message 里面定义的 dds 通信数据结构体
然后建立一个对象Example class
class Example : public rclcpp::Node
{public:Example();~Example();int Init();private:// 1# 订阅者rclcpp::Subscription<auto_msg::msg::PerceptionCommand>::SharedPtr perceptionCommand_sub_;// 2# 信息存储的成员rclcpp::AtomicSet<auto_msg::msg::PerceptionCommand> perceptionCommand_;// 3#建立 订阅者的回调函数 msg_PerceptionCommand_callback,实现的数据存放在perceptionCommand_成员void msg_PerceptionCommand_callback(const auto_msg::msg::PerceptionCommand::SharedPtr msg);// 4# 建立一个50ms 的定时器rclcpp::TimerBase::SharedPtr workingStatus_timer_;// 5# 建立发布者 Publisherrclcpp::Publisher<auto_msg::msg::WorkingStatus>::SharedPtr workingStatus_pub_;rclcpp::AtomicSet<auto_msg::msg::WorkingStatus> workingStatus_;// 6# 定时器的回调函数void timer_WorkingStatus_callback();};
我们建立了6个函数,分别的作用是
1、建立一个 perceptionCommand_sub_ 订阅者
2、建立一个 perceptionCommand_ 的信息存储的成员
3、建立 订阅者的回调函数 msg_PerceptionCommand_callback,实现把收到的数据存放在 perceptionCommand_ 的信息存储的成员里面
4、建立一个50ms 的定时器
5、建立一个 workingStatus_pub_ 的发布者;4、建立一个 workingStatus_ 成员
6、建立一个 定时器的回调函数,处理perceptionCommand_ 成员的数据,并发送workingStatus_pub_ 数据。
example.cpp 里面这么写
int Example::Init()
{counter_ = 0;workingStatus_pub_ = this->create_publisher<auto_msg::msg::WorkingStatus>("example_status_pub",2);perceptionCommand_sub_ = this->create_subscription<auto_msg::msg::PerceptionCommand>("perception_command_pub",2,std::bind(&Example::msg_PerceptionCommand_callback, this, _1));workingStatus_timer_ = this->create_wall_timer(50, std::bind(&Example::timer_WorkingStatus_callback, this)); // 50 millisecondreturn 0;
}void Example::timer_WorkingStatus_callback()
{// here is how use the msg which had receivedauto_msg::msg::PerceptionCommand perceptionCommand = perceptionCommand_.Get();if (perceptionCommand.system_command() == 0x06) {// for example, do sth what you want when command equal some valueint a = 1;}auto_msg::msg::WorkingStatus workingStatus;workingStatus.time_stamp() = rclcpp::PlatformGetMs();workingStatus_pub_->publish(workingStatus);
}void Example::msg_PerceptionCommand_callback(const auto_msg::msg::PerceptionCommand::SharedPtr msg)
{perceptionCommand_.Set(*msg);
}7、修改main 文件
增加头文件引用
#include <rclcpp/rclcpp.hpp>
#include "example.h"
main 函数里面加入
rclcpp::init(argc, argv);std::shared_ptr<yanyx::auto::Example> example = std::make_shared<yanyx::auto::Example>();example->Init();rclcpp::spin(example);
关于 rclcpp::spin() 的说明可以看我的另外一篇文章《【eProsima Fast DDS(2)】ROS2:spin() spin_some()函数》,这个是堵塞了main 函数。
整体上处理的思路是:
1、建立一个 perceptionCommand_sub_ 订阅者
2、建立一个 perceptionCommand_ 的信息存储的成员
3、建立 订阅者的回调函数 msg_PerceptionCommand_callback,实现把收到的数据存放在 perceptionCommand_ 的信息存储的成员里面
4、建立一个50ms 的定时器
5、建立一个 workingStatus_pub_ 的发布者;4、建立一个 workingStatus_ 成员
6、建立一个 定时器的回调函数,处理perceptionCommand_ 成员的数据,并发送workingStatus_pub_ 数据。
相关文章:
【QT开发(6)】0926-QT 中加入 fastDDS 通信库的程序使用说明
在智能驾驶中,DDS有可能被广泛使用,因此推出这篇说明教程。 1、基于【QT开发(5)】教程的项目文档进行开发 2、安装DDS 查看《【eProsima Fast DDS(1)】安装eProsima Fast DDS》 至少安装: foonathan_m…...

js 判断字符串中是否包含某个字符串
方法一(推荐使用): indexOf() indexOf() 方法:返回某个指定的字符串值在字符串中首次出现的位置。如果要检索的字符串值没有出现,则该方法返回 -1。 var str "LiHeErNAN"; console.log(str.indexOf("A") ! -1 ); // true方法二:m…...

部署在阿里云ECS服务器上的微服务项目中获取到的时间和windows的时间不一样的问题
继上一篇文章《阿里云ECS服务器无法发送邮件问题解决方案》之后,又发现登录的时候发送邮件中的时间和自己windows上的时间不一样,大概找了一下原因,是LocaDateTime使用的时区不一样导致的远程服务器和本机时间不一致。 只需要在LocaDateTime…...
怎么通过portainer部署一个vue项目
这篇文章分享一下今天通过docker打包vue项目,并使用打包的镜像在portainer上部署运行,参考了vue-cli和docker的官方文档。 首先,阅读vue-cli关于docker部署的说明 vue-cli关于docker部署的说明https://cli.vuejs.org/guide/deployment.html#…...
)
Springboot实现websocket(连接前jwt验证token)
背景 用户连接服务器weksocket前,需经过jwt的token验证(token中包含账号信息),验证合法后,才可以于服务器正常交互。 实现 一、配置依赖(pom.xml) <!-- websocket --><dependency&g…...

2023/10/3
平荒尽处是春山 二零二三年的十月 似乎已经过去了很久很久 没有了曾经的意气风发 也没有了歌伴夜声 之前一直不知道自己为什么喜欢打篮球 虽然打得不好 但是今天突然明白了 我喜欢的不是过人后的喜悦 而是篮球应声入网的清脆的声音 当然 出来进球 还有的是擦筐而出和三不沾 但是…...
zemax场曲/畸变图与网格畸变图
网格畸变是XY两个方向上的几何畸变,是不同视场实际像高与近轴像高的偏差。 垂轴放大率在整个视场范围内不能保持常数 当一个有畸变的光学系统对一个方形的网状物体成像时,若δy>0,则主光线的交点高度y比理想像高y低,视场越大,低得越多&a…...

【小尘送书-第六期】《巧用ChatGPT轻松玩转新媒体运营》AI赋能运营全流程,帮你弯道超车、轻松攀登运营之巅
大家好,我是小尘,欢迎你的关注!大家可以一起交流学习!欢迎大家在CSDN后台私信我!一起讨论学习,讨论如何找到满意的工作! 👨💻博主主页:小尘要自信 …...

GD32F10 串口通信
1. 什么是通信 通信,指人与人或人与自然之间通过某种行为或媒介进行的信息交流与传递,从广义上指需要信息的双方或多方在不违背各自意愿的情况下采用任意方法,任意媒质,将信息从某方准确安全地传送到另方。通信双方如果想正确传输…...
QT常用控件介绍
QT信号与槽机制 connect (A,SIGNLA(aaa()),B, SLOT(bbb())); GUI继承简介 布局管理器 垂直布局水平布局网格布局表单布局 输出控件 Label: 标签Text Browser: 文本浏览器Graphics View : 图形视图框架Calendar Widget: 日历控件LCD Number: 液晶字体数…...
[FineReport]安装与使用(连接Hive3.1.2)
一、安装(对应hive3.1.2) 注:服务器的和本地的要同时安装。本地是测试环境,服务器的是生产环境 1、服务器安装 1、下载 免费下载FineReport - FineReport报表官网 向下滑找到 2、解压 [rootck1 /home/data_warehouse/software]# tar -zxvf tomcat…...
黑马mysql教程笔记(mysql8教程)基础篇——数据库相关概念、mysql安装及卸载、数据模型、SQL通用语法及分类(DDL、DML、DQL、DCL)
参考文章1:https://www.bilibili.com/video/BV1Kr4y1i7ru/ 参考文章2:https://dhc.pythonanywhere.com/article/public/1/ 文章目录 基础篇数据库相关概念(数据库DataBase(DB)、数据库管理系统DataBase Management Sy…...

最新AI智能创作系统源码V2.6.2/AI绘画系统/支持GPT联网提问/支持Prompt应用
一、AI创作系统 SparkAi创作系统是基于国外很火的ChatGPT进行开发的AI智能问答系统和AI绘画系统。本期针对源码系统整体测试下来非常完美,可以说SparkAi是目前国内一款的ChatGPT对接OpenAI软件系统。那么如何搭建部署AI创作ChatGPT?小编这里写一个详细图…...

神器 CodeWhisperer
这两天看到了好多关于 Amazon CodeWhisperer 针对个人用户终身免费使用的消息,便抽空简单来重点介绍下如何在 VS Code 这款 IDE 上安装和使用 CodeWhisperer。 亚马逊云科技开发者社区为开发者们提供全球的开发技术资源。这里有技术文档、开发案例、技术专栏、培训视…...
GraphQL全面深度讲解
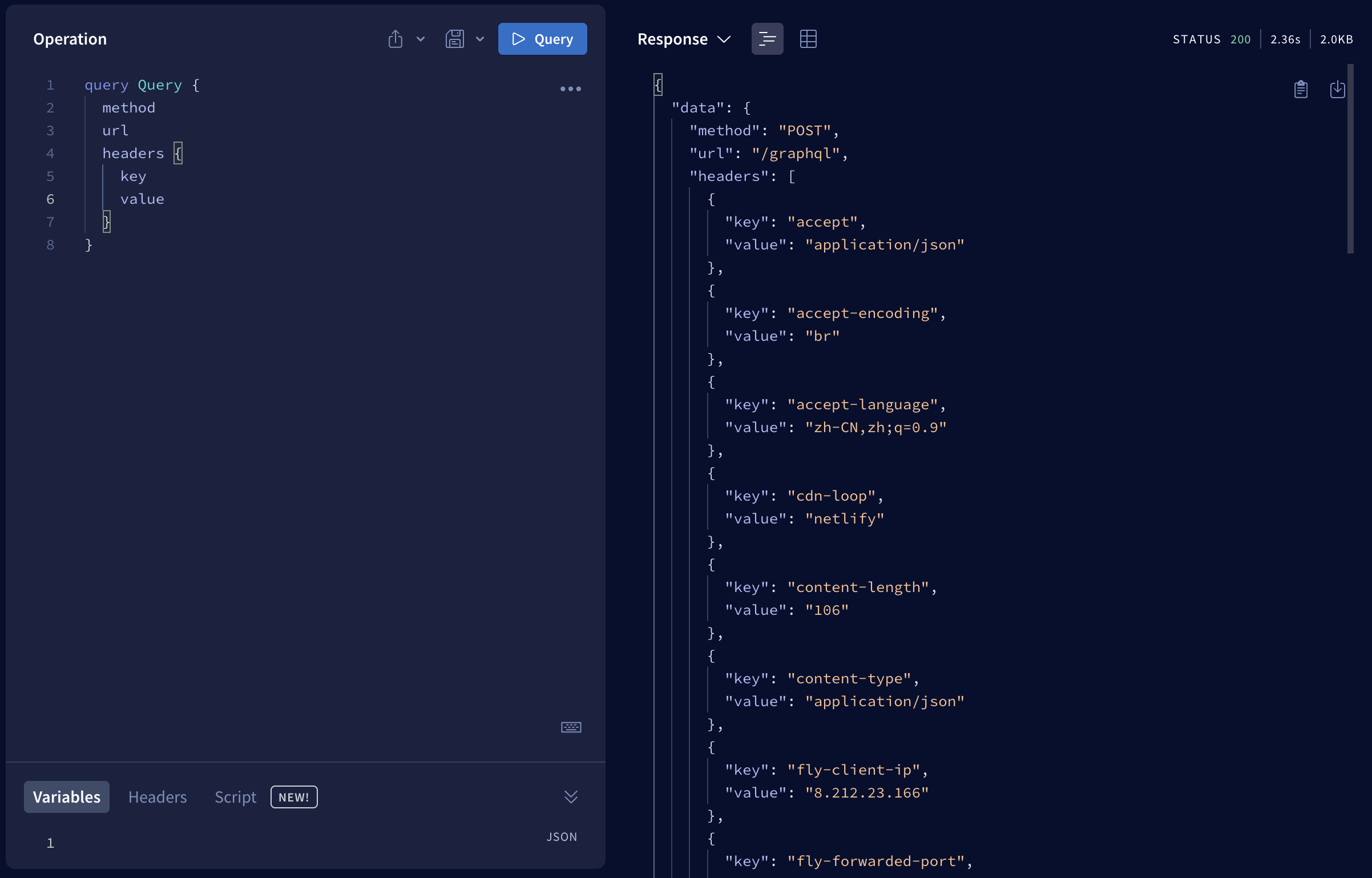
目录 一、GraphQL 是什么 二、GraphQL 规范 数据模型 字段 参数 三、运行示例 四、优势和劣势 优势 劣势 一、GraphQL 是什么 GraphQL 是一种用于 API 的查询语言,也是一个基于服务端的运行引擎。 GraphQL 提供了一套完整的规范和描述用于查询 API…...

9.1 链表
链表:数据结构,一堆数据的集合,链表的每一项都是结构体,都使用指针指向下一个结构体。 数组的缺点:由于数组的地址是连续的,对数组的数据进行增、删、改后数据不连续,需要较大的运算量才能实现…...
分布式文件系统FastDFS实战
1. 分布式文件系统应用场景 互联网海量非结构化数据的存储需求: 电商网站:海量商品图片视频网站:海量视频文件网盘:海量文件社交网站:海量图片 2.FastDFS介绍 https://github.com/happyfish100/fastdfs 2.1简介 …...

手机自动直播系统源码交付与代理加盟注意事项解析!
随着直播行业的不断发展,手机自动直播已经成为了人们生活中不可或缺的一部分。手机无人直播软件成了香饽饽,各类手机实景直播APP大批量涌现。因为创业和技术门槛低,市场需求高,所以成了最火热创业赛道。那么如果是不懂技术的人群&…...

NodeJS 如何连接 MongoDB
初始化: yarn init使用命令: yarn add mongodb新建 index.js 文件: const MongoClient require(mongodb).MongoClient; const db_name "fly_articleDb"; const url mongodb://127.0.0.1:27017;(async function () {const cli…...

基于Java的老年人体检管理系统设计与实现(源码+lw+部署文档+讲解等)
文章目录 前言具体实现截图论文参考详细视频演示为什么选择我自己的网站自己的小程序(小蔡coding)有保障的售后福利 代码参考源码获取 前言 💗博主介绍:✌全网粉丝10W,CSDN特邀作者、博客专家、CSDN新星计划导师、全栈领域优质创作…...

3步实现AutoHotkey脚本独立运行:Ahk2Exe编译工具完全指南
3步实现AutoHotkey脚本独立运行:Ahk2Exe编译工具完全指南 【免费下载链接】Ahk2Exe Official AutoHotkey script compiler - written itself in AutoHotkey 项目地址: https://gitcode.com/gh_mirrors/ah/Ahk2Exe 你是否厌倦了每次运行AutoHotkey脚本都需要安…...

无线渗透测试框架Airecon:自动化工具链整合与实战应用
1. 项目概述与核心价值最近在整理自己的渗透测试工具箱时,又翻出了pikpikcu/airecon这个老伙计。说实话,在无线安全评估这个细分领域里,它可能不是名气最响的那个,但绝对是我个人在内部网络渗透和红队演练中最顺手、最高效的“组合…...

高考解析几何“秒杀”技巧:用极点极线快速搞定椭圆定点定值难题
高考解析几何“秒杀”技巧:用极点极线快速搞定椭圆定点定值难题 解析几何作为高考数学的压轴题型,常常让考生望而生畏。面对复杂的计算和抽象的条件,如何在有限时间内快速找到突破口?极点极线理论作为高等几何中的重要工具&#x…...

Flutter GetX实战:从Provider迁移到GetX,我的开发效率提升了多少?
Flutter GetX实战:从Provider迁移到GetX的效率革命 当Flutter开发团队面临状态管理方案的选择时,往往会陷入一种甜蜜的烦恼——官方推荐的Provider虽然稳定可靠,但第三方库GetX却以"全家桶"式的解决方案不断吸引开发者的目光。作为…...

生物信息学逆向解析mRNA疫苗序列:从公开数据组装BNT-162b2与mRNA-1273的基因蓝图
1. 项目概述与背景解析 最近在生物信息学和疫苗研究领域,一个名为“NAalytics/Assemblies-of-putative-SARS-CoV2-spike-encoding-mRNA-sequences-for-vaccines-BNT-162b2-and-mRNA-1273”的项目引起了我的注意。这个项目标题看起来很长,但核心非常明确&…...

开源机械爪控制库:从PID算法到ROS集成的全栈开发指南
1. 项目概述:一个开源的机械爪设计与控制库最近在机器人硬件开发的圈子里,开源项目“MeyerZhou/openclaw”引起了不少创客和机器人爱好者的注意。简单来说,这是一个专注于机械爪(或称机械手、夹爪)设计与控制的代码库和…...

百度网盘直链解析终极指南:如何实现高速下载的完整技术方案
百度网盘直链解析终极指南:如何实现高速下载的完整技术方案 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 在云存储服务普及的今天,百度网盘作为国内用…...

OpenClaw 小龙虾智能体联动 DeepSeek 大模型部署实操攻略
前置准备 获取小龙虾open claw一键安装包(www.totom.top)并安装电脑端已成功安装并正常启动OpenClaw,右上角 Gateway 状态显示在线设备网络通畅,可正常访问 DeepSeek 开放平台拥有可接收验证码的手机号 / 微信,用于平…...

基于MCP协议构建AI数据连接器:从原理到SQL查询服务器实践
1. 项目概述:一个连接AI与数据源的“翻译官”最近在折腾AI应用开发,特别是想让大语言模型(LLM)能直接、安全地访问我自己的数据库、API或者文件系统时,遇到了一个普遍难题:怎么让AI理解并操作这些外部数据源…...
)
设计师速存!Midjourney未公开的风格隐藏开关:--style raw、--s 750、--no texture三者协同作用的神经渲染原理(GPU显存占用下降41%实测)
更多请点击: https://intelliparadigm.com 第一章:设计师速存!Midjourney未公开的风格隐藏开关:--style raw、--s 750、--no texture三者协同作用的神经渲染原理(GPU显存占用下降41%实测) Midjourney v6.1…...