【改进哈里鹰算法(NCHHO)】使用混沌和非线性控制参数来提高哈里鹰算法的优化性能,解决车联网相关的路由问题(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码及文献

💥1 概述
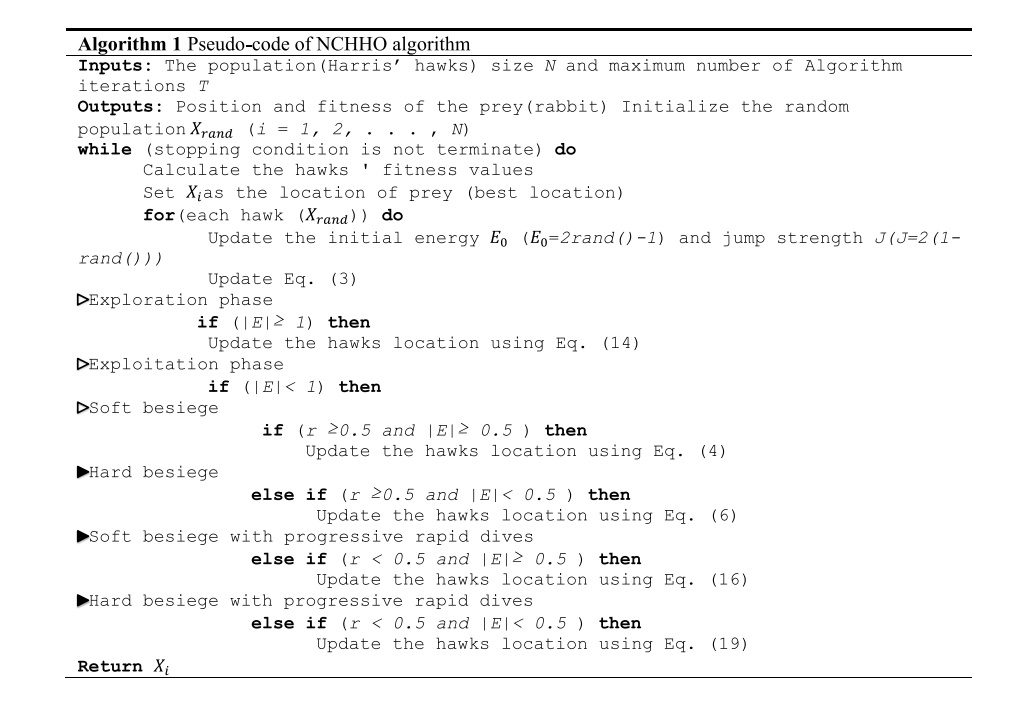
Harris Hawks Optimizer (HHO) 是元启发式领域的众多最新算法之一。HHO算法模仿哈里斯鹰的合作行为及其在自然界中的觅食行为,称为惊喜突袭。HHO受益于少量的控制参数设置,实施的简单性以及高水平的勘探和开发。为了缓解该算法的缺点,该文提出一种基于非线性的混沌哈里斯鹰优化(NCHHO)的改进版本。NCHHO使用混沌和非线性控制参数来提高HHO的优化性能。在所提出的方法中使用混沌地图的主要目的是改善HHO的探索行为。此外,本文还引入了一个非线性控制参数来调整HHO的探索和开发行为。所提出的NCHHO算法使用各种混沌图展示了性能的改进,这些混沌图是为了识别最有效的混沌图,并在几个众所周知的基准函数上进行了测试。本文还考虑解决车联网(IoV)优化问题,该问题展示了NCHHO在解决大规模现实问题方面的适用性。结果表明,与其他算法相比,NCHHO算法非常具有竞争力,并且通常更胜一筹。特别是,NCHHO在求解问题维数为D = 92和30的单模态和多模态函数时,平均提供了50%更好的结果,而对于更高维的问题,我们提出的算法与其他算法相比,在D = 100和100的情况下显示出1000%一致的改进。在解决车联网问题时,成功率为62.5%,与最先进的算法相比,这要好得多。为此,本文提出的NCHHO算法展示了一种被不同应用广泛使用的有前途的方法,这为行业和企业解决日常遇到的优化问题带来了好处,例如资源分配,信息检索,寻找通过网络发送数据的最佳路径,路径规划以及许多其他应用。
【改进哈里鹰算法(NCHHO)】是一种使用混沌和非线性控制参数来提高哈里鹰算法优化性能的方法,用于解决与车联网相关的路由问题。
NCHHO方法通过引入混沌地图和非线性控制参数来改进HHO算法的性能。其中,混沌地图的应用旨在改善HHO算法的搜索行为,增强其对解空间的探索能力。此外,还引入了非线性控制参数来调节HHO算法的探索性和剥削性行为,使其具备更好的适应性和灵活性。
在该研究中,NCHHO算法通过采用多个混沌地图,并在多个众所周知的基准函数上进行测试,展示了性能的改进。通过比较不同混沌地图的效果,研究者能够确定最有效的混沌地图,并对算法进行优化。此外,该方法还考虑了解决车联网(IoV)优化问题,展示了NCHHO在解决大规模现实问题上的适用性和有效性。
这项研究为改进哈里鹰算法提供了一种新的方法,通过引入混沌和非线性控制参数,显著提高了算法的性能和适应性。通过在车联网路由问题中的应用,研究者们展示了NCHHO算法在实际场景下解决问题的能力。这对于提升车联网系统的路由效果和优化性能具有重要意义。
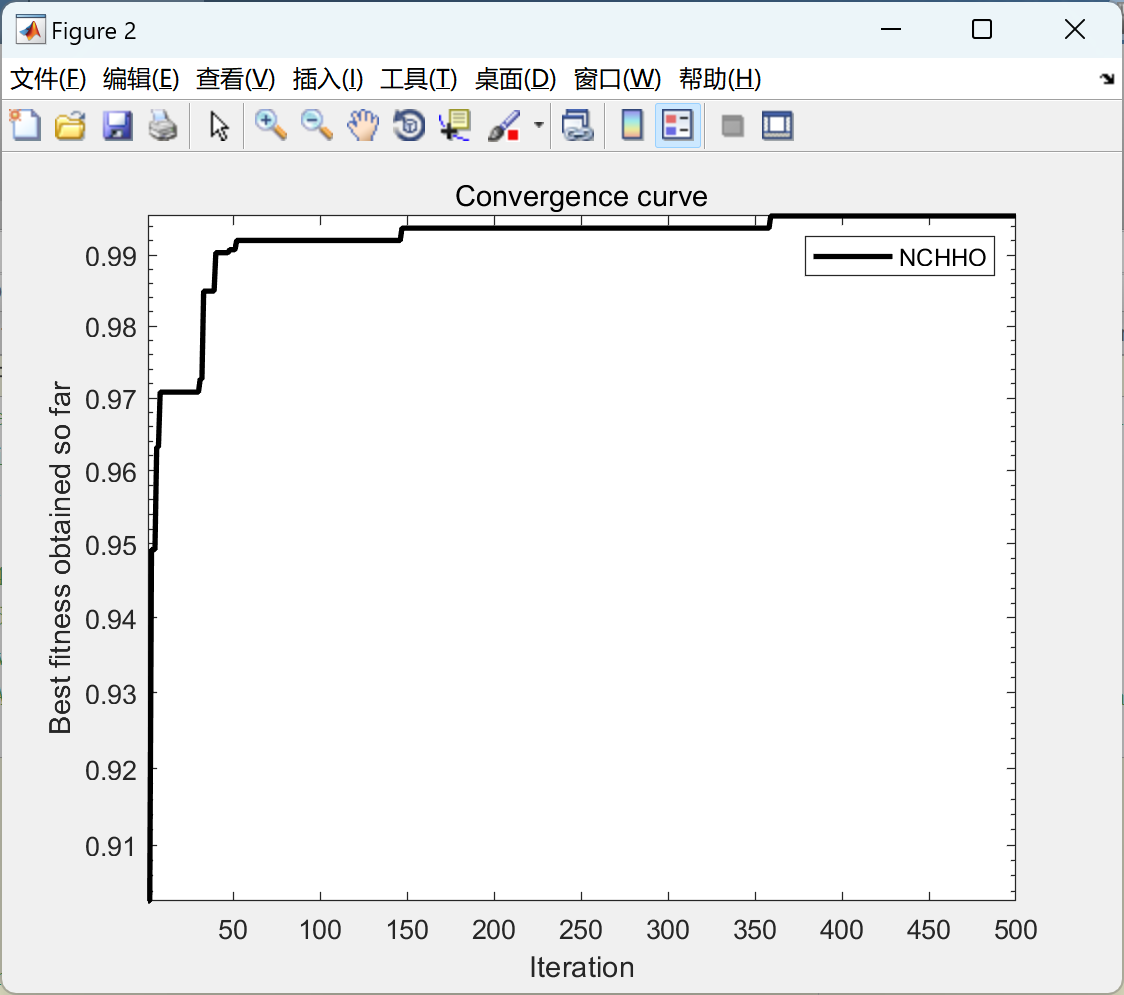
📚2 运行结果

部分代码:
function [Rabbit_Energy,Rabbit_Location,CNVG] = NCHHO_IoV(N,T,lb,ub,dim,fobj)% initialize the location and Energy of the rabbit
Rabbit_Location=zeros(1,dim);
Rabbit_Energy=0;%Initialize the locations of Harris' hawks
X=initialization(N,dim,ub,lb);CNVG=zeros(1,T);t=0; % Loop counterwhile t<Tfor i=1:size(X,1)% Check boundriesFU=X(i,:)>ub;FL=X(i,:)<lb;X(i,:)=(X(i,:).*(~(FU+FL)))+ub.*FU+lb.*FL;% fitness of locationsfitness=fobj(X(i,:));% Update the location of Rabbitif fitness>Rabbit_EnergyRabbit_Energy=fitness;Rabbit_Location=X(i,:);endendE1=abs(2*(1-(t/T))-2); % factor to show the decreaing energy of rabbita1 = 4; % Initial chaotic map parameter configurationteta = 0.7; % Initial chaotic map parameter configuration% Update the location of Harris' hawksfor i=1:size(X,1)for ii=1:4Cm(1,ii) = abs((a1/4)*sin(pi*teta));teta = Cm(1,ii);endE0=2*rand()-1; %-1<E0<1Escaping_Energy=E1*(E0); % escaping energy of rabbitif abs(Escaping_Energy)>=1%% Exploration:% Harris' hawks perch randomly based on 2 strategy:q=rand();rand_Hawk_index = floor(N*rand()+1);X_rand = X(rand_Hawk_index, :);if q<0.5% perch based on other family membersX(i,:)=X_rand-Cm(1,1)*abs(X_rand-2*Cm(1,2)*X(i,:));elseif q>=0.5% perch on a random tall tree (random site inside group's home range)X(i,:)=(Rabbit_Location(1,:)-mean(X))-Cm(1,3)*((ub-lb)*Cm(1,4)+lb);endelseif abs(Escaping_Energy)<1%% Exploitation:% Attacking the rabbit using 4 strategies regarding the behavior of the rabbit%% phase 1: surprise pounce (seven kills)% surprise pounce (seven kills): multiple, short rapid dives by different hawksr=rand(); % probablity of each eventif r>=0.5 && abs(Escaping_Energy)<0.5 % Hard besiegeX(i,:)=(Rabbit_Location)-Escaping_Energy*abs(Rabbit_Location-X(i,:));endif r>=0.5 && abs(Escaping_Energy)>=0.5 % Soft besiegeJump_strength=2*(1-rand()); % random jump strength of the rabbitX(i,:)=(Rabbit_Location-X(i,:))-Escaping_Energy*abs(Jump_strength*Rabbit_Location-X(i,:));end%% phase 2: performing team rapid dives (leapfrog movements)if r<0.5 && abs(Escaping_Energy)>=0.5 % Soft besiege % rabbit try to escape by many zigzag deceptive motionsw1=2*exp(-(8*t/T)^2); % Non-linear control ParameterJump_strength=2*(1-rand());X1=w1*Rabbit_Location-Escaping_Energy*abs(Jump_strength*Rabbit_Location-X(i,:));if fobj(X1)>fobj(X(i,:)) % improved move?X(i,:)=X1;else % hawks perform levy-based short rapid dives around the rabbitX2=w1*Rabbit_Location-Escaping_Energy*abs(Jump_strength*Rabbit_Location-X(i,:))+rand(1,dim).*Levy(dim);if (fobj(X2)>fobj(X(i,:))) % improved move?X(i,:)=X2;endendendif r<0.5 && abs(Escaping_Energy)<0.5 % Hard besiege % rabbit try to escape by many zigzag deceptive motions% hawks try to decrease their average location with the rabbitw1=2*exp(-(8*t/T)^2);Jump_strength=2*(1-rand());X1=w1*Rabbit_Location-Escaping_Energy*abs(Jump_strength*Rabbit_Location-mean(X));if fobj(X1)>fobj(X(i,:)) % improved move?X(i,:)=X1;else % Perform levy-based short rapid dives around the rabbitX2=w1*Rabbit_Location-Escaping_Energy*abs(Jump_strength*Rabbit_Location-mean(X))+rand(1,dim).*Levy(dim);if (fobj(X2)>fobj(X(i,:))) % improved move?X(i,:)=X2;endendend%%endendt=t+1;CNVG(t)=Rabbit_Energy;
endendfunction [Rabbit_Energy,Rabbit_Location,CNVG] = NCHHO_IoV(N,T,lb,ub,dim,fobj)
% initialize the location and Energy of the rabbit
Rabbit_Location=zeros(1,dim);
Rabbit_Energy=0;
%Initialize the locations of Harris' hawks
X=initialization(N,dim,ub,lb);
CNVG=zeros(1,T);
t=0; % Loop counter
while t<T
for i=1:size(X,1)
% Check boundries
FU=X(i,:)>ub;FL=X(i,:)<lb;X(i,:)=(X(i,:).*(~(FU+FL)))+ub.*FU+lb.*FL;
% fitness of locations
fitness=fobj(X(i,:));
% Update the location of Rabbit
if fitness>Rabbit_Energy
Rabbit_Energy=fitness;
Rabbit_Location=X(i,:);
end
end
E1=abs(2*(1-(t/T))-2); % factor to show the decreaing energy of rabbit
a1 = 4; % Initial chaotic map parameter configuration
teta = 0.7; % Initial chaotic map parameter configuration
% Update the location of Harris' hawks
for i=1:size(X,1)
for ii=1:4
Cm(1,ii) = abs((a1/4)*sin(pi*teta));
teta = Cm(1,ii);
end
E0=2*rand()-1; %-1<E0<1
Escaping_Energy=E1*(E0); % escaping energy of rabbit
if abs(Escaping_Energy)>=1
%% Exploration:
% Harris' hawks perch randomly based on 2 strategy:
q=rand();
rand_Hawk_index = floor(N*rand()+1);
X_rand = X(rand_Hawk_index, :);
if q<0.5
% perch based on other family members
X(i,:)=X_rand-Cm(1,1)*abs(X_rand-2*Cm(1,2)*X(i,:));
elseif q>=0.5
% perch on a random tall tree (random site inside group's home range)
X(i,:)=(Rabbit_Location(1,:)-mean(X))-Cm(1,3)*((ub-lb)*Cm(1,4)+lb);
end
elseif abs(Escaping_Energy)<1
%% Exploitation:
% Attacking the rabbit using 4 strategies regarding the behavior of the rabbit
%% phase 1: surprise pounce (seven kills)
% surprise pounce (seven kills): multiple, short rapid dives by different hawks
r=rand(); % probablity of each event
if r>=0.5 && abs(Escaping_Energy)<0.5 % Hard besiege
X(i,:)=(Rabbit_Location)-Escaping_Energy*abs(Rabbit_Location-X(i,:));
end
if r>=0.5 && abs(Escaping_Energy)>=0.5 % Soft besiege
Jump_strength=2*(1-rand()); % random jump strength of the rabbit
X(i,:)=(Rabbit_Location-X(i,:))-Escaping_Energy*abs(Jump_strength*Rabbit_Location-X(i,:));
end
%% phase 2: performing team rapid dives (leapfrog movements)
if r<0.5 && abs(Escaping_Energy)>=0.5 % Soft besiege % rabbit try to escape by many zigzag deceptive motions
w1=2*exp(-(8*t/T)^2); % Non-linear control Parameter
Jump_strength=2*(1-rand());
X1=w1*Rabbit_Location-Escaping_Energy*abs(Jump_strength*Rabbit_Location-X(i,:));
if fobj(X1)>fobj(X(i,:)) % improved move?
X(i,:)=X1;
else % hawks perform levy-based short rapid dives around the rabbit
X2=w1*Rabbit_Location-Escaping_Energy*abs(Jump_strength*Rabbit_Location-X(i,:))+rand(1,dim).*Levy(dim);
if (fobj(X2)>fobj(X(i,:))) % improved move?
X(i,:)=X2;
end
end
end
if r<0.5 && abs(Escaping_Energy)<0.5 % Hard besiege % rabbit try to escape by many zigzag deceptive motions
% hawks try to decrease their average location with the rabbit
w1=2*exp(-(8*t/T)^2);
Jump_strength=2*(1-rand());
X1=w1*Rabbit_Location-Escaping_Energy*abs(Jump_strength*Rabbit_Location-mean(X));
if fobj(X1)>fobj(X(i,:)) % improved move?
X(i,:)=X1;
else % Perform levy-based short rapid dives around the rabbit
X2=w1*Rabbit_Location-Escaping_Energy*abs(Jump_strength*Rabbit_Location-mean(X))+rand(1,dim).*Levy(dim);
if (fobj(X2)>fobj(X(i,:))) % improved move?
X(i,:)=X2;
end
end
end
%%
end
end
t=t+1;
CNVG(t)=Rabbit_Energy;
end
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
🌈4 Matlab代码及文献
相关文章:
【改进哈里鹰算法(NCHHO)】使用混沌和非线性控制参数来提高哈里鹰算法的优化性能,解决车联网相关的路由问题(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

【C语言】宏定义
🚩 WRITE IN FRONT🚩 🔎 介绍:"謓泽"正在路上朝着"攻城狮"方向"前进四"🔎🏅 荣誉:2021|2022年度博客之星物联网与嵌入式开发TOP5|TOP4、2021|2222年获评百大博…...
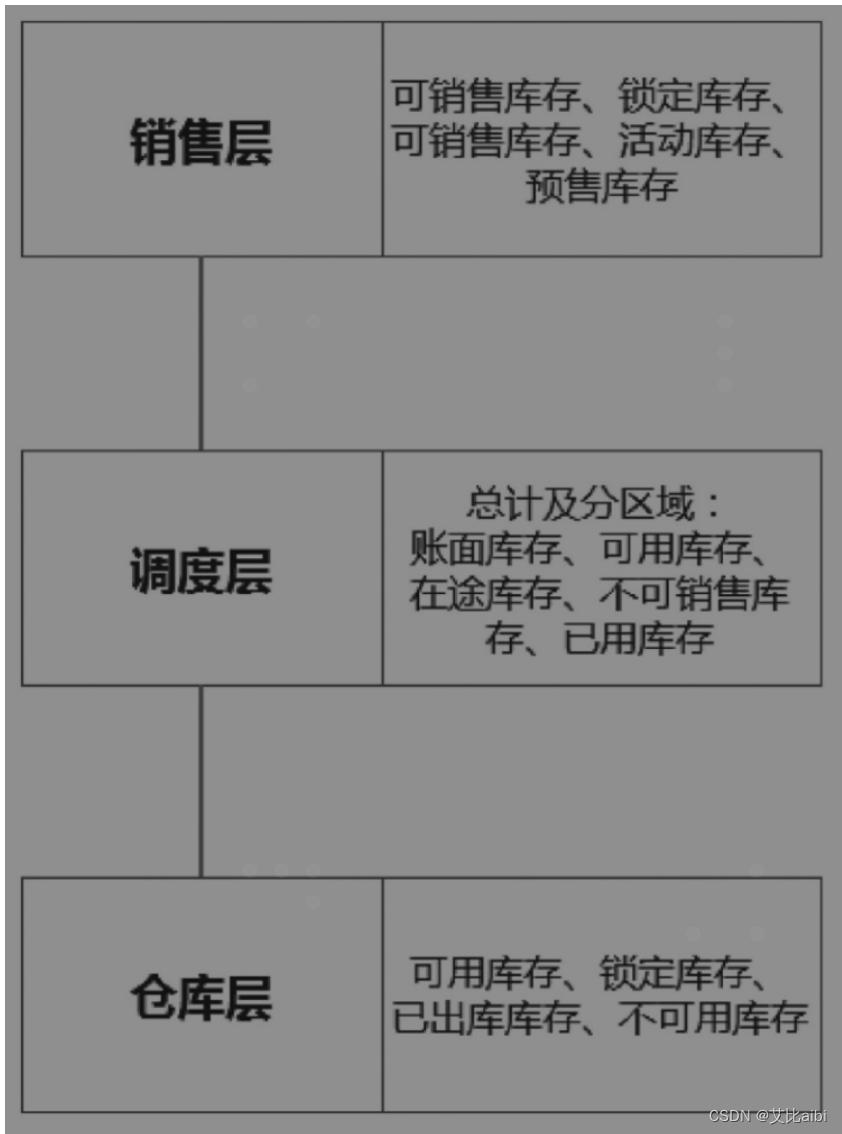
库存三层模型概述
库存分层 (1)电商库存体系分为三层:销售层、调度层、仓库层。 库存三层模型:销售库存,调度层属于订单领域-履约。实物库存属于库存领域 WMS的库存跟调度层是一致的。 但是销售库存跟调度层可能不一致,因为…...

SNERT预备队招新CTF体验赛-Web(SWCTF)
目录 1、F12 2、robots 3、game1-喂青蛙 4、game 2 - flap bird 5、game 3 - Clash 6、Get&Post 7、sql (1)手工注入 (2)工具注入 8、命令执行漏洞 9、文件上传漏洞 10、文件泄露 11、php反序列化漏洞 12、PHP绕…...
OpenGLES:绘制一个彩色、旋转的3D圆柱
一.概述 上一篇博文讲解了怎么绘制一个彩色旋转的立方体 这一篇讲解怎么绘制一个彩色旋转的圆柱 圆柱的顶点创建主要基于2D圆进行扩展,与立方体没有相似之处 圆柱绘制的关键点就是将圆柱拆解成:两个Z坐标不为0的圆 一个长方形的圆柱面 绘制2D圆的…...
【QT开发(6)】0926-QT 中加入 fastDDS 通信库的程序使用说明
在智能驾驶中,DDS有可能被广泛使用,因此推出这篇说明教程。 1、基于【QT开发(5)】教程的项目文档进行开发 2、安装DDS 查看《【eProsima Fast DDS(1)】安装eProsima Fast DDS》 至少安装: foonathan_m…...

js 判断字符串中是否包含某个字符串
方法一(推荐使用): indexOf() indexOf() 方法:返回某个指定的字符串值在字符串中首次出现的位置。如果要检索的字符串值没有出现,则该方法返回 -1。 var str "LiHeErNAN"; console.log(str.indexOf("A") ! -1 ); // true方法二:m…...

部署在阿里云ECS服务器上的微服务项目中获取到的时间和windows的时间不一样的问题
继上一篇文章《阿里云ECS服务器无法发送邮件问题解决方案》之后,又发现登录的时候发送邮件中的时间和自己windows上的时间不一样,大概找了一下原因,是LocaDateTime使用的时区不一样导致的远程服务器和本机时间不一致。 只需要在LocaDateTime…...
怎么通过portainer部署一个vue项目
这篇文章分享一下今天通过docker打包vue项目,并使用打包的镜像在portainer上部署运行,参考了vue-cli和docker的官方文档。 首先,阅读vue-cli关于docker部署的说明 vue-cli关于docker部署的说明https://cli.vuejs.org/guide/deployment.html#…...
)
Springboot实现websocket(连接前jwt验证token)
背景 用户连接服务器weksocket前,需经过jwt的token验证(token中包含账号信息),验证合法后,才可以于服务器正常交互。 实现 一、配置依赖(pom.xml) <!-- websocket --><dependency&g…...

2023/10/3
平荒尽处是春山 二零二三年的十月 似乎已经过去了很久很久 没有了曾经的意气风发 也没有了歌伴夜声 之前一直不知道自己为什么喜欢打篮球 虽然打得不好 但是今天突然明白了 我喜欢的不是过人后的喜悦 而是篮球应声入网的清脆的声音 当然 出来进球 还有的是擦筐而出和三不沾 但是…...
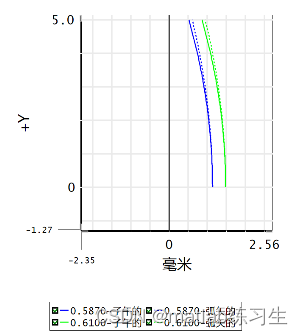
zemax场曲/畸变图与网格畸变图
网格畸变是XY两个方向上的几何畸变,是不同视场实际像高与近轴像高的偏差。 垂轴放大率在整个视场范围内不能保持常数 当一个有畸变的光学系统对一个方形的网状物体成像时,若δy>0,则主光线的交点高度y比理想像高y低,视场越大,低得越多&a…...

【小尘送书-第六期】《巧用ChatGPT轻松玩转新媒体运营》AI赋能运营全流程,帮你弯道超车、轻松攀登运营之巅
大家好,我是小尘,欢迎你的关注!大家可以一起交流学习!欢迎大家在CSDN后台私信我!一起讨论学习,讨论如何找到满意的工作! 👨💻博主主页:小尘要自信 …...

GD32F10 串口通信
1. 什么是通信 通信,指人与人或人与自然之间通过某种行为或媒介进行的信息交流与传递,从广义上指需要信息的双方或多方在不违背各自意愿的情况下采用任意方法,任意媒质,将信息从某方准确安全地传送到另方。通信双方如果想正确传输…...
QT常用控件介绍
QT信号与槽机制 connect (A,SIGNLA(aaa()),B, SLOT(bbb())); GUI继承简介 布局管理器 垂直布局水平布局网格布局表单布局 输出控件 Label: 标签Text Browser: 文本浏览器Graphics View : 图形视图框架Calendar Widget: 日历控件LCD Number: 液晶字体数…...
[FineReport]安装与使用(连接Hive3.1.2)
一、安装(对应hive3.1.2) 注:服务器的和本地的要同时安装。本地是测试环境,服务器的是生产环境 1、服务器安装 1、下载 免费下载FineReport - FineReport报表官网 向下滑找到 2、解压 [rootck1 /home/data_warehouse/software]# tar -zxvf tomcat…...
黑马mysql教程笔记(mysql8教程)基础篇——数据库相关概念、mysql安装及卸载、数据模型、SQL通用语法及分类(DDL、DML、DQL、DCL)
参考文章1:https://www.bilibili.com/video/BV1Kr4y1i7ru/ 参考文章2:https://dhc.pythonanywhere.com/article/public/1/ 文章目录 基础篇数据库相关概念(数据库DataBase(DB)、数据库管理系统DataBase Management Sy…...

最新AI智能创作系统源码V2.6.2/AI绘画系统/支持GPT联网提问/支持Prompt应用
一、AI创作系统 SparkAi创作系统是基于国外很火的ChatGPT进行开发的AI智能问答系统和AI绘画系统。本期针对源码系统整体测试下来非常完美,可以说SparkAi是目前国内一款的ChatGPT对接OpenAI软件系统。那么如何搭建部署AI创作ChatGPT?小编这里写一个详细图…...

神器 CodeWhisperer
这两天看到了好多关于 Amazon CodeWhisperer 针对个人用户终身免费使用的消息,便抽空简单来重点介绍下如何在 VS Code 这款 IDE 上安装和使用 CodeWhisperer。 亚马逊云科技开发者社区为开发者们提供全球的开发技术资源。这里有技术文档、开发案例、技术专栏、培训视…...
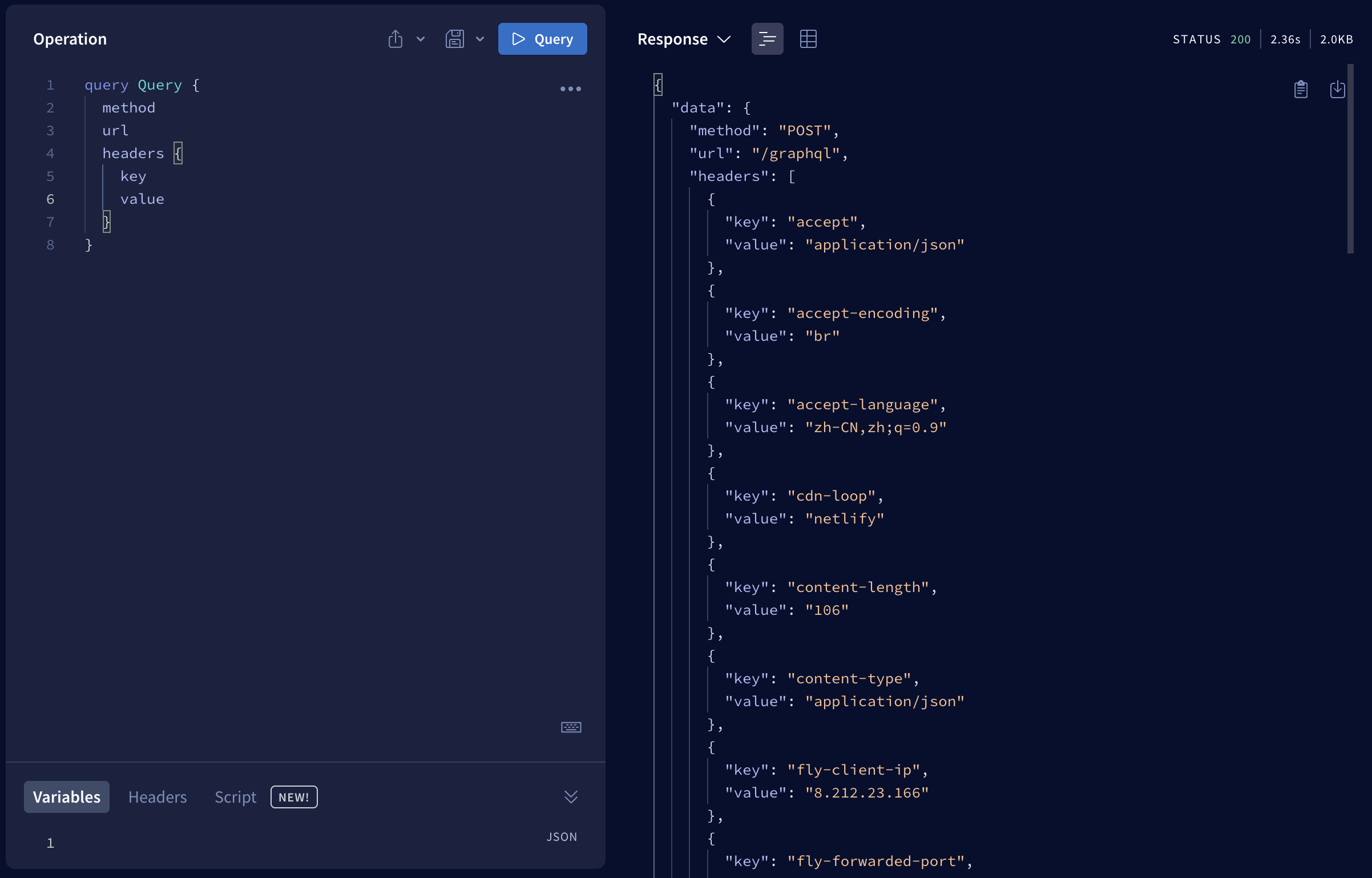
GraphQL全面深度讲解
目录 一、GraphQL 是什么 二、GraphQL 规范 数据模型 字段 参数 三、运行示例 四、优势和劣势 优势 劣势 一、GraphQL 是什么 GraphQL 是一种用于 API 的查询语言,也是一个基于服务端的运行引擎。 GraphQL 提供了一套完整的规范和描述用于查询 API…...

告别手改脚本!用CANoe Panel面板做个变量控制台,测试效率翻倍
告别手改脚本!用CANoe Panel面板打造智能变量控制台 在车载网络测试领域,效率提升往往隐藏在那些被忽视的日常操作细节中。当测试工程师频繁打开CAPL脚本修改超时阈值、调整诊断ID或切换测试模式时,不仅打断了工作流,更在团队协作…...

Linuxbonding链路生产排障流程
Linuxbonding链路生产排障流程这是一篇面向中级 Linux 使用者的技术文章,主题聚焦在bonding链路,重点讨论链路聚合、冗余切换和接口状态。在真实生产环境中,bonding链路相关问题往往不会以单一错误形式出现,而是混杂在日志、权限、…...

qmcdump:专业解决QQ音乐加密音频格式兼容性问题
qmcdump:专业解决QQ音乐加密音频格式兼容性问题 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump 在数字音乐时…...

Python自动化Excel数据抓取:OpenClaw技能实战指南
1. 项目概述:从Excel表格到智能数据抓取如果你每天的工作都离不开Excel,并且经常需要从各种网页、文档甚至PDF里手动复制粘贴数据,然后费劲地整理到表格里,那你一定对“Excel大师”这个称号既向往又头疼。我们总希望Excel能更“聪…...

OpenClaw 小龙虾智能体联动 DeepSeek 大模型部署实操攻略
前置准备 获取小龙虾open claw一键安装包(www.totom.top)并安装电脑端已成功安装并正常启动OpenClaw,右上角 Gateway 状态显示在线设备网络通畅,可正常访问 DeepSeek 开放平台拥有可接收验证码的手机号 / 微信,用于平…...
)
告别命令行恐惧:用Docker Compose一键部署EMQX集群(附Web控制台和端口映射配置)
告别命令行恐惧:用Docker Compose一键部署EMQX集群(附Web控制台和端口映射配置) 在物联网和分布式系统开发中,EMQX作为高性能的MQTT消息服务器,已经成为连接海量设备与后端服务的核心枢纽。然而,传统安装方…...

ARM Jazelle技术:硬件加速Java字节码执行详解
1. ARM Jazelle技术概述Jazelle技术是ARM架构中用于硬件加速Java字节码执行的关键扩展,最早出现在ARMv5TE架构中。这项技术通过在处理器内部集成Java字节码执行单元,实现了Java虚拟机(JVM)功能的硬件化。与传统的软件解释器相比,Jazelle能够将…...

React轻量级代码编辑器组件:基于Textarea的语法高亮方案
1. 项目概述:一个为React开发者量身打造的代码编辑器组件 如果你在React项目中需要嵌入一个代码编辑器,并且希望它轻量、美观、开箱即用,那么 uiwjs/react-textarea-code-editor 这个组件库很可能就是你一直在寻找的解决方案。它不是一个像…...

量化部署终极指南:从GPTQ到AWQ,精度损失与显存节省的平衡艺术
系列导读 你现在看到的是《本地大模型私有化部署与优化:从入门到生产级实战》的第 7/10 篇,当前这篇会重点解决:帮你搞懂每种量化方法的优劣,用最少显存跑最大模型,精度损失可控。 上一篇回顾:第 6 篇《RAG知识库实战:LangChain+Chroma搭建本地问答系统,解决幻觉与知…...

ComfyUI ControlNet Aux 终极指南:30+种预处理器让AI图像生成更精准
ComfyUI ControlNet Aux 终极指南:30种预处理器让AI图像生成更精准 【免费下载链接】comfyui_controlnet_aux ComfyUIs ControlNet Auxiliary Preprocessors 项目地址: https://gitcode.com/gh_mirrors/co/comfyui_controlnet_aux 想让您的AI图像生成具备真实…...