计算机竞赛 目标检测-行人车辆检测流量计数
文章目录
- 前言
- 1\. 目标检测概况
- 1.1 什么是目标检测?
- 1.2 发展阶段
- 2\. 行人检测
- 2.1 行人检测简介
- 2.2 行人检测技术难点
- 2.3 行人检测实现效果
- 2.4 关键代码-训练过程
- 最后
前言
🔥 优质竞赛项目系列,今天要分享的是
行人车辆目标检测计数系统
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
1. 目标检测概况
1.1 什么是目标检测?
目标检测,粗略来说就是:输入图片/视频,经过处理,得到:目标的位置信息(比如左上角和右下角的坐标)、目标的预测类别、目标的预测置信度(confidence)。
1.2 发展阶段
-
手工特征提取算法,如VJ、HOG、DPM
-
R-CNN算法(2014),最早的基于深度学习的目标检测器之一,其结构是两级网络:
- 1)首先需要诸如选择性搜索之类的算法来提出可能包含对象的候选边界框;
- 2)然后将这些区域传递到CNN算法进行分类;
-
R-CNN算法存在的问题是其仿真很慢,并且不是完整的端到端的目标检测器。
-
Fast R-CNN算法(2014末),对原始R-CNN进行了相当大的改进:提高准确度,并减少执行正向传递所花费的时间。
是,该模型仍然依赖于外部区域搜索算法。 -
faster R-CNN算法(2015),真正的端到端深度学习目标检测器。删除了选择性搜索的要求,而是依赖于
- (1)完全卷积的区域提议网络(RPN, Region Purpose Network),可以预测对象边界框和“对象”分数(量化它是一个区域的可能性的分数)。
- (2)然后将RPN的输出传递到R-CNN组件以进行最终分类和标记。
-
R-CNN系列算法,都采取了two-stage策略。特点是:虽然检测结果一般都非常准确,但仿真速度非常慢,即使是在GPU上也仅获得5 FPS。
-
one-stage方法有:yolo(2015)、SSD(2015末),以及在这两个算法基础上改进的各论文提出的算法。这些算法的基本思路是:均匀地在图片的不同位置进行密集抽样,抽样时可以采用不同尺度和长宽比,然后利用CNN提取特征后直接进行分类与回归。
整个过程只需要一步,所以其优势是速度快,但是训练比较困难。 -
yolov3(2018)是yolo作者提出的第三个版本(之前还提过yolov2和它们的tinny版本,tinny版本经过压缩更快但是也降低了准确率)。
2. 行人检测
这里学长以行人检测作为例子来讲解目标检测。
2.1 行人检测简介
行人检测( Pedestrian Detection)一直是计算机视觉研究中的热点和难点。行人检测要解决的问题是:找出图像或视频帧
行人检测技术有很强的使用价值,它可以与行人跟踪,行人重识别等技术结合,应用于汽车无人驾驶系统(ADAS),智能机器人,智能视频监控,人体行为分析,客流统计系统,智能交通等领域。
2.2 行人检测技术难点
由于人体具有相当的柔性,因此会有各种姿态和形状,其外观受穿着,姿态,视角等影响非常大,另外还面临着遮挡
、光照等因素的影响,这使得行人检测成为计算机视觉领域中一个极具挑战性的课题。行人检测要解决的主要难题是:
-
外观差异大:包括视角,姿态,服饰和附着物,光照,成像距离等。从不同的角度看过去,行人的外观是很不一样的。处于不同姿态的行人,外观差异也很大。由于人穿的衣服不同,以及打伞、戴帽子、戴围巾、提行李等附着物的影响,外观差异也非常大。光照的差异也导致了一些困难。远距离的人体和近距离的人体,在外观上差别也非常大。
-
遮挡问题: 在很多应用场景中,行人非常密集,存在严重的遮挡,我们只能看到人体的一部分,这对检测算法带来了严重的挑战。
-
背景复杂:无论是室内还是室外,行人检测一般面临的背景都非常复杂,有些物体的外观和形状、颜色、纹理很像人体,导致算法无法准确的区分。
-
检测速度:行人检测一般采用了复杂的模型,运算量相当大,要达到实时非常困难,一般需要大量的优化。
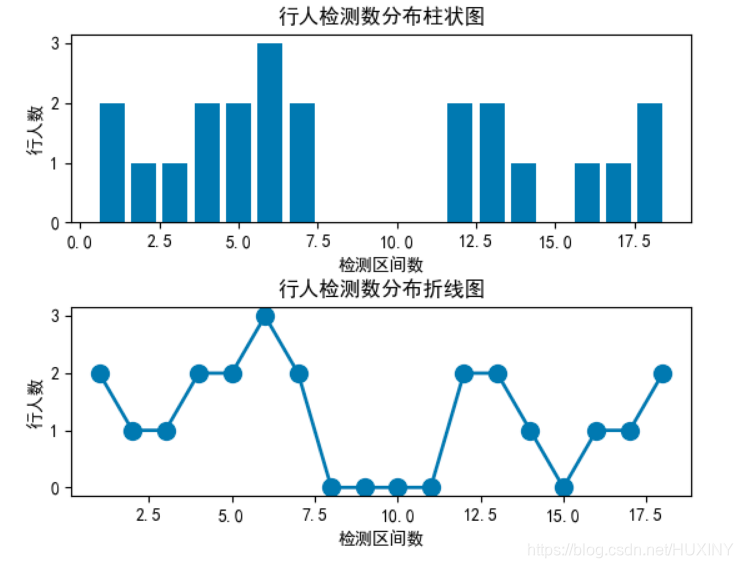
2.3 行人检测实现效果

检测到行人后还可以做流量分析:
2.4 关键代码-训练过程
import cv2import numpy as npimport randomdef load_images(dirname, amout = 9999):img_list = []file = open(dirname)img_name = file.readline()while img_name != '': # 文件尾img_name = dirname.rsplit(r'/', 1)[0] + r'/' + img_name.split('/', 1)[1].strip('\n')img_list.append(cv2.imread(img_name))img_name = file.readline()amout -= 1if amout <= 0: # 控制读取图片的数量breakreturn img_list# 从每一张没有人的原始图片中随机裁出10张64*128的图片作为负样本def sample_neg(full_neg_lst, neg_list, size):random.seed(1)width, height = size[1], size[0]for i in range(len(full_neg_lst)):for j in range(10):y = int(random.random() * (len(full_neg_lst[i]) - height))x = int(random.random() * (len(full_neg_lst[i][0]) - width))neg_list.append(full_neg_lst[i][y:y + height, x:x + width])return neg_list# wsize: 处理图片大小,通常64*128; 输入图片尺寸>= wsizedef computeHOGs(img_lst, gradient_lst, wsize=(128, 64)):hog = cv2.HOGDescriptor()# hog.winSize = wsizefor i in range(len(img_lst)):if img_lst[i].shape[1] >= wsize[1] and img_lst[i].shape[0] >= wsize[0]:roi = img_lst[i][(img_lst[i].shape[0] - wsize[0]) // 2: (img_lst[i].shape[0] - wsize[0]) // 2 + wsize[0], \(img_lst[i].shape[1] - wsize[1]) // 2: (img_lst[i].shape[1] - wsize[1]) // 2 + wsize[1]]gray = cv2.cvtColor(roi, cv2.COLOR_BGR2GRAY)gradient_lst.append(hog.compute(gray))# return gradient_lstdef get_svm_detector(svm):sv = svm.getSupportVectors()rho, _, _ = svm.getDecisionFunction(0)sv = np.transpose(sv)return np.append(sv, [[-rho]], 0)# 主程序# 第一步:计算HOG特征neg_list = []pos_list = []gradient_lst = []labels = []hard_neg_list = []svm = cv2.ml.SVM_create()pos_list = load_images(r'G:/python_project/INRIAPerson/96X160H96/Train/pos.lst')full_neg_lst = load_images(r'G:/python_project/INRIAPerson/train_64x128_H96/neg.lst')sample_neg(full_neg_lst, neg_list, [128, 64])print(len(neg_list))computeHOGs(pos_list, gradient_lst)[labels.append(+1) for _ in range(len(pos_list))]computeHOGs(neg_list, gradient_lst)[labels.append(-1) for _ in range(len(neg_list))]# 第二步:训练SVMsvm.setCoef0(0)svm.setCoef0(0.0)svm.setDegree(3)criteria = (cv2.TERM_CRITERIA_MAX_ITER + cv2.TERM_CRITERIA_EPS, 1000, 1e-3)svm.setTermCriteria(criteria)svm.setGamma(0)svm.setKernel(cv2.ml.SVM_LINEAR)svm.setNu(0.5)svm.setP(0.1) # for EPSILON_SVR, epsilon in loss function?svm.setC(0.01) # From paper, soft classifiersvm.setType(cv2.ml.SVM_EPS_SVR) # C_SVC # EPSILON_SVR # may be also NU_SVR # do regression tasksvm.train(np.array(gradient_lst), cv2.ml.ROW_SAMPLE, np.array(labels))# 第三步:加入识别错误的样本,进行第二轮训练# 参考 http://masikkk.com/article/SVM-HOG-HardExample/hog = cv2.HOGDescriptor()hard_neg_list.clear()hog.setSVMDetector(get_svm_detector(svm))for i in range(len(full_neg_lst)):rects, wei = hog.detectMultiScale(full_neg_lst[i], winStride=(4, 4),padding=(8, 8), scale=1.05)for (x,y,w,h) in rects:hardExample = full_neg_lst[i][y:y+h, x:x+w]hard_neg_list.append(cv2.resize(hardExample,(64,128)))computeHOGs(hard_neg_list, gradient_lst)[labels.append(-1) for _ in range(len(hard_neg_list))]svm.train(np.array(gradient_lst), cv2.ml.ROW_SAMPLE, np.array(labels))# 第四步:保存训练结果hog.setSVMDetector(get_svm_detector(svm))hog.save('myHogDector.bin')最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
计算机竞赛 目标检测-行人车辆检测流量计数
文章目录 前言1\. 目标检测概况1.1 什么是目标检测?1.2 发展阶段 2\. 行人检测2.1 行人检测简介2.2 行人检测技术难点2.3 行人检测实现效果2.4 关键代码-训练过程 最后 前言 🔥 优质竞赛项目系列,今天要分享的是 行人车辆目标检测计数系统 …...
GPT系列模型解读:GPT-1
GPT系列 GPT(Generative Pre-trained Transformer)是一系列基于Transformer架构的预训练语言模型,由OpenAI开发。以下是GPT系列的主要模型: GPT:GPT-1是于2018年发布的第一个版本,它使用了12个Transformer…...

王杰国庆作业day3
父子进程对话 #include <stdio.h> #include <string.h> #include <stdlib.h> #include <my_head.h> int main(int argc, const char *argv[]) {mkfifo("./fifo1",0664);mkfifo("./fifo2",0664);pid_t cpid fork();if(0 < cp…...
量子计算基础知识—Part1
1.什么是量子计算机? 量子计算机是基于量子力学原理构建的机器,采用了一种新的方法来处理信息,从而使其具有超强的功能。量子计算机使用Qubits处理信息。 2. 什么是量子系统? 一个量子系统指的是由量子力学规则描述和控制的物理…...

【PostgreSQL】【存储管理】表和元组的组织方式
外存管理负责处理数据库与外存介质(PostgreSQL8.4.1版本中只支持磁盘的管理操作)的交互过程。在PostgreSQL中,外存管理由SMGR(主要代码在smgr.c中)提供了对外存的统一接口。SMGR负责统管各种介质管理器,会根据上层的请求选择一个具体的介质管理器进行操作…...

VSCode安装图文详解教程
版权声明 本文原创作者:谷哥的小弟作者博客地址:http://blog.csdn.net/lfdfhl 教程说明 本教程旨在详细介绍VSCode的安装过程及其注意事项。 下载VSCode 请在官方网站 https://code.visualstudio.com/ 下载https://code.visualstudio.com/至本地&…...
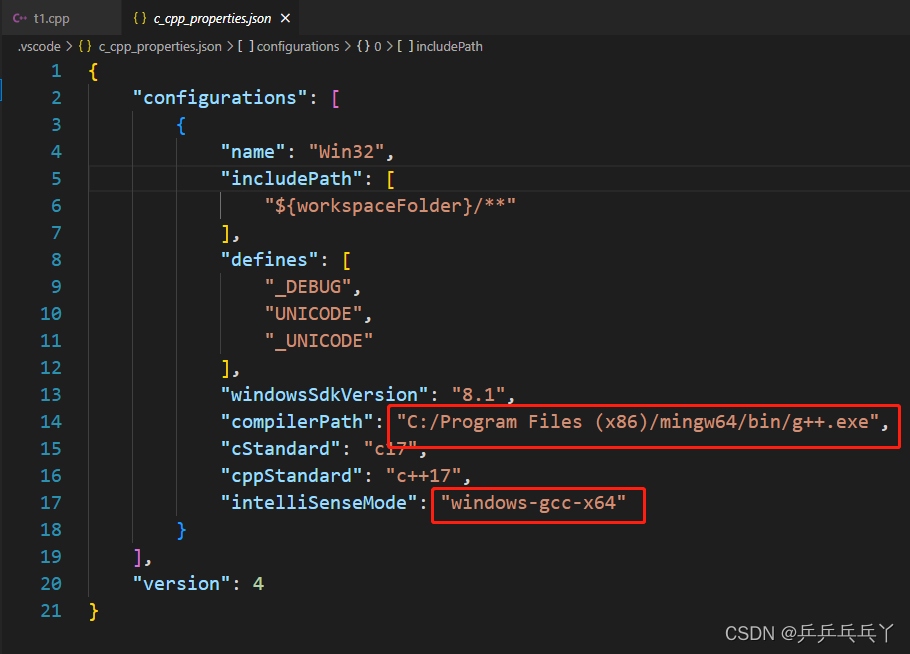
vscode 无法打开源文件
以下是c/c插件的intelligense设置情况: 解决办法: 重新安装vsode无用;重新下载mingw64,管用了!(我猜可能是之前换电脑移植文件的时候导致了部分文件丢失)...
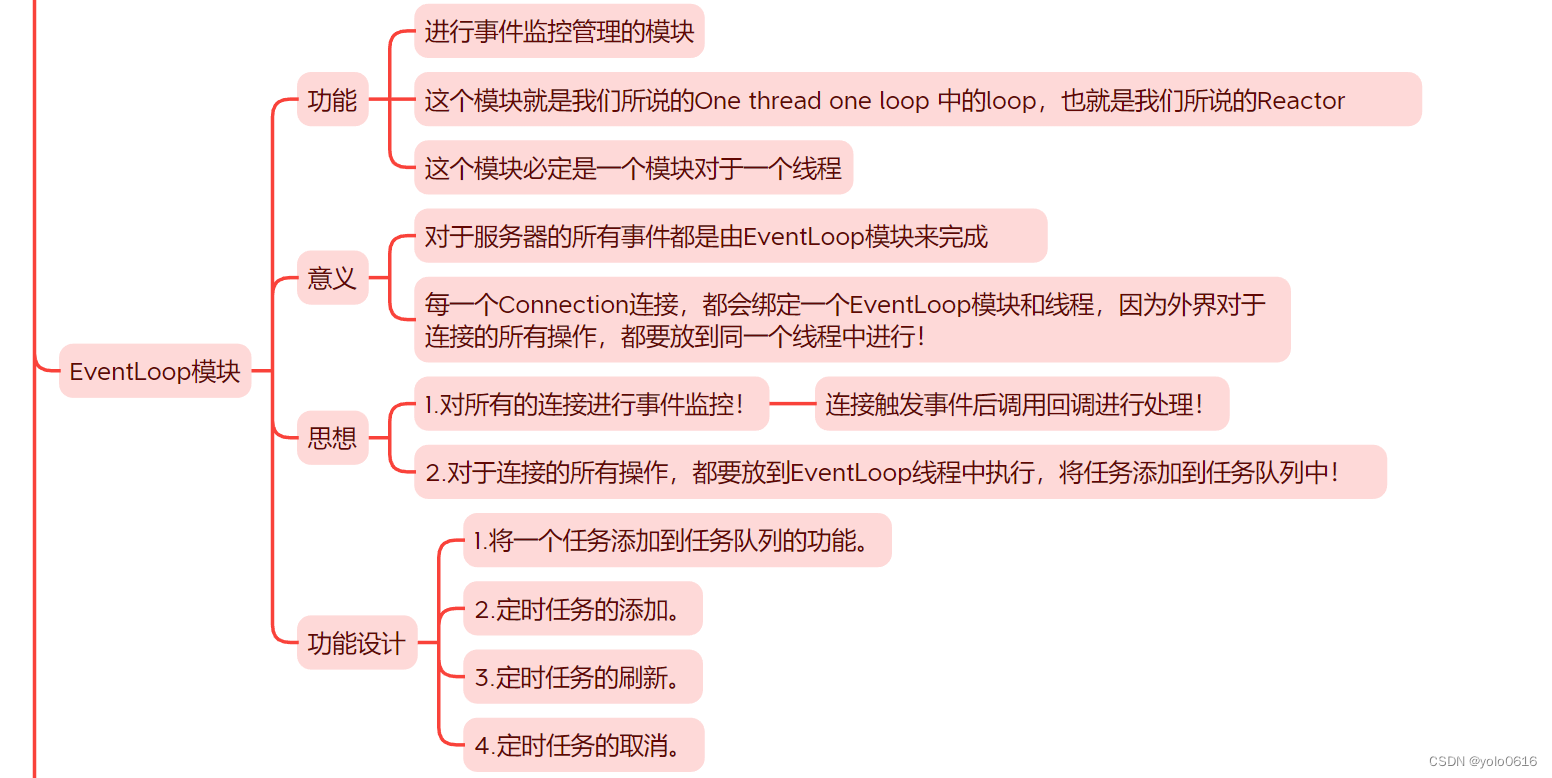
1.8.C++项目:仿muduo库实现并发服务器之eventloop模块的设计
项目完整在: 文章目录 一、eventloop模块:进行事件监控,以及事件处理的模块二、提供的功能三、实现思想(一)功能(二)意义(三)功能设计 四、框架五、代码 一、eventloop模…...

Linux基本指令(二)
💓博主个人主页:不是笨小孩👀 ⏩专栏分类:数据结构与算法👀 C👀 刷题专栏👀 C语言👀 🚚代码仓库:笨小孩的代码库👀 ⏩社区:不是笨小孩👀 🌹欢迎大…...
)
量化交易全流程(五)
本节目录 策略回测 多因子模型 本节主要讨论回测相关的内容,包括两种不同的回测机制,即向量化回测和事件驱动回测;如何灵活使用开源工具来编写自己的回测程序;不同实现方式的优劣对比等。 在我们研究策略的时候,需要…...

聊聊MySQL的InnoDB引擎与MVCC
目录 一、InnoDB引擎 1.1逻辑存储结构 1). 表空间 2). 段 3). 区 4). 页 5). 行 1.2架构 1.2.1内存结构 1). Buffer Pool 2). Change Buffer 3). Adaptive Hash Index 4). Log Buffer 1.2.2磁盘结构 1). System Tablespace 2). File-Per-Table Tablespaces 3). …...
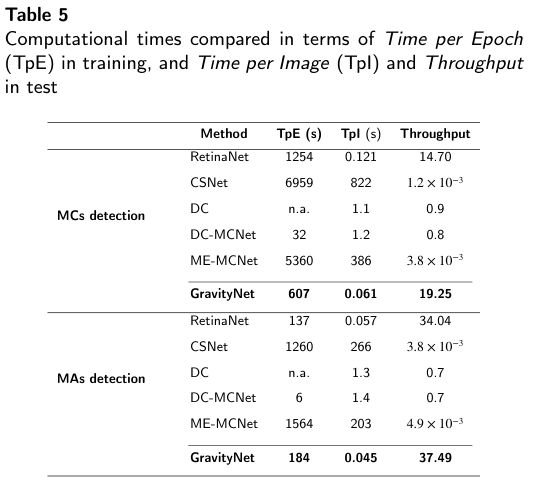
小病变检测:Gravity Network for end-to-end small lesion detection
论文作者:Ciro Russo,Alessandro Bria,Claudio Marrocco 作者单位:University of Cassino and L.M. 论文链接:http://arxiv.org/abs/2309.12876v1 内容简介: 1)方向:医学影像中小病变检测 2࿰…...

Flink--7、窗口(窗口的概念、分类、API、分配器、窗口函数)、触发器、移除器
星光下的赶路人star的个人主页 内心的平静始于不再让他人掌控你的感情 文章目录 0、前言1、窗口(Window)1.1 窗口的概念1.2 窗口的分类1.3 窗口API概览1.4 窗口分配器(Window Assigner)1.4.1 时间窗口1.4.2 计数窗口 1.5 窗口函数…...

vscode 注释插件koroFileHeader
https://blog.51cto.com/u_15785499/5664323 https://blog.csdn.net/weixin_67697081/article/details/129004675...
Centos7安装php-fpm
目录 第一步:查看系统IP地址和网卡名称 第二步:更改网络配置模式 第三步、重启network 查看iptablies ,将第十行,十一行删除 第四步:关闭config 第五步:创建nginx 文件夹 查看目录下的文件 进入nginx文件夹 第…...

计算机网络(五):运输层
参考引用 计算机网络微课堂-湖科大教书匠计算机网络(第7版)-谢希仁 1. 运输层概述 之前所介绍的计算机网络体系结构中的物理层、数据链路层以及网络层它们共同解决了将主机通过异构网络互联起来所面临的问题,实现了主机到主机的通信ÿ…...

适合在校学生的云服务器有哪些?
随着云计算技术的发展,越来越多的学生开始使用云服务器来进行学习和实践。对于学生来说,选择一款便宜的云服务器不仅可以帮助他们降低成本,还可以提高学习和实践的效率。本文将介绍几款适合学生使用的便宜云服务器。 1、腾讯云学生服务器【点…...

计算机竞赛 深度学习驾驶行为状态检测系统(疲劳 抽烟 喝水 玩手机) - opencv python
文章目录 1 前言1 课题背景2 相关技术2.1 Dlib人脸识别库2.2 疲劳检测算法2.3 YOLOV5算法 3 效果展示3.1 眨眼3.2 打哈欠3.3 使用手机检测3.4 抽烟检测3.5 喝水检测 4 最后 1 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 基于深度学习的驾…...
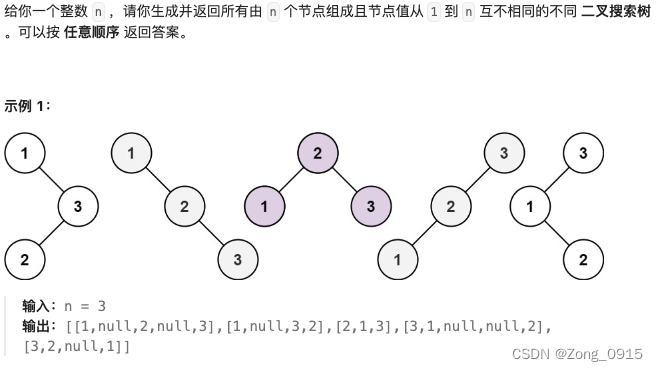
想要精通算法和SQL的成长之路 - 验证二叉搜索树和不同的二叉搜索树
想要精通算法和SQL的成长之路 - 验证二叉搜索树和不同的二叉搜索树 前言一. 验证二叉搜索树二. 不同的二叉搜索树三. 不同的二叉搜索树II 前言 想要精通算法和SQL的成长之路 - 系列导航 二叉搜索树的定义: 节点的左子树只包含 小于 当前节点的数。节点的右子树只包…...
SpringCloudAlibaba 相关组件的学习一
目录 前言 系统架构演变 1、单体架构 2、垂直架构 3、分布式架构 4、SOA架构 5、微服务架构 一、微服务架构的介绍 1、微服务架构的常见问题 2 微服务架构的常见概念 2.1 服务治理 2.2 服务调用 2.3 服务网关 2.4 服务容错 2.5 链路追踪 3、微服务架构的常用解决…...

Python 3.14.5 发布:多项改进,垃圾回收器回滚,还有这些新特性!
Python 3.14.5 发布Python 3.14.5 现已发布,这是 3.14 的第五个维护版本。自 3.14.4 以来,包含约 154 项错误修复、构建改进和文档更改。垃圾回收器回滚值得注意的是,Python 3.14.5 中的垃圾回收器 (GC) 发生了变化。由于一些原因,…...

caffeine+redis实现多级缓存解决缓存雪崩
废话不多说直接上代码:1.依赖<dependency><groupId>com.github.ben-manes.caffeine</groupId><artifactId>caffeine</artifactId><version>2.9.3</version></dependency>这里版本java8所以用的2.9.32.配置类&#…...

FcμR识别IgM复杂机制的揭示:解锁人体免疫早期应答之谜
一、引言免疫系统是机体抵御病原体入侵、维持内环境稳定的关键防线。在免疫应答过程中,不同类型的免疫球蛋白发挥着独特的作用。其中,IgM作为人体五类免疫球蛋白之一,在免疫应答早期起着至关重要的作用。而Fc受体作为免疫系统中的重要组成部分…...

避开这些坑!在Colab上运行AlphaFold2时,参数、路径和依赖库的常见错误排查指南
避开这些坑!在Colab上运行AlphaFold2时,参数、路径和依赖库的常见错误排查指南 在Google Colab上运行AlphaFold2看似简单,但实际操作中90%的用户都会遇到各种"诡异"报错。上周一位结构生物学博士向我吐槽:"明明按照…...
被nginx拦截,并返回状态码400和408的抓包排查过程)
文件分片上传接口(Easyswoole)被nginx拦截,并返回状态码400和408的抓包排查过程
场景:前端上传的视频文件过大,做了一个分片上传的接口, 调试接口的时候,后端EasySwoole程序接收不到请求,前端发现接口返回状态码408遇到的问题:一个文件分三片上传,第一次请求接口正常…...

构建离线优先应用终极指南:Material Components Web 与 Service Worker 完美集成
构建离线优先应用终极指南:Material Components Web 与 Service Worker 完美集成 【免费下载链接】material-components-web Modular and customizable Material Design UI components for the web 项目地址: https://gitcode.com/gh_mirrors/ma/material-compone…...

Windows XP图标主题完整指南:轻松为Linux桌面注入经典怀旧风格
Windows XP图标主题完整指南:轻松为Linux桌面注入经典怀旧风格 【免费下载链接】Windows-XP Remake of classic YlmfOS theme with some mods for icons to scale right 项目地址: https://gitcode.com/gh_mirrors/win/Windows-XP 还在怀念Windows XP那个经典…...

AI产品经理 VS 传统产品经理:不是技术升级,而是物种进化!你准备好了吗?
文章指出,AI时代的产品经理并非仅仅是懂点AI技术的传统产品经理升级版,而是完全不同的“物种”。文章从产品经理的职责、核心能力、与AI的协作模式等方面对比了传统产品经理和AI产品经理的区别,强调AI产品经理需要具备处理意图模糊性、设计失…...

CocoaPods终极版本管理指南:掌握语义化版本控制与依赖锁定策略
CocoaPods终极版本管理指南:掌握语义化版本控制与依赖锁定策略 【免费下载链接】CocoaPods The Cocoa Dependency Manager. 项目地址: https://gitcode.com/gh_mirrors/co/CocoaPods CocoaPods是iOS和macOS开发中最受欢迎的依赖管理器,它通过智能…...
)
Python爬虫实战:用urllib和正则搞定E-Hentai图片批量下载(附完整代码与避坑指南)
Python高效爬虫实战:多线程下载与智能错误处理 引言 在当今数据驱动的时代,网络爬虫已成为获取互联网信息的重要工具。对于开发者而言,掌握高效的爬虫技术不仅能提升工作效率,还能解决许多实际业务场景中的数据采集需求。本文将深…...