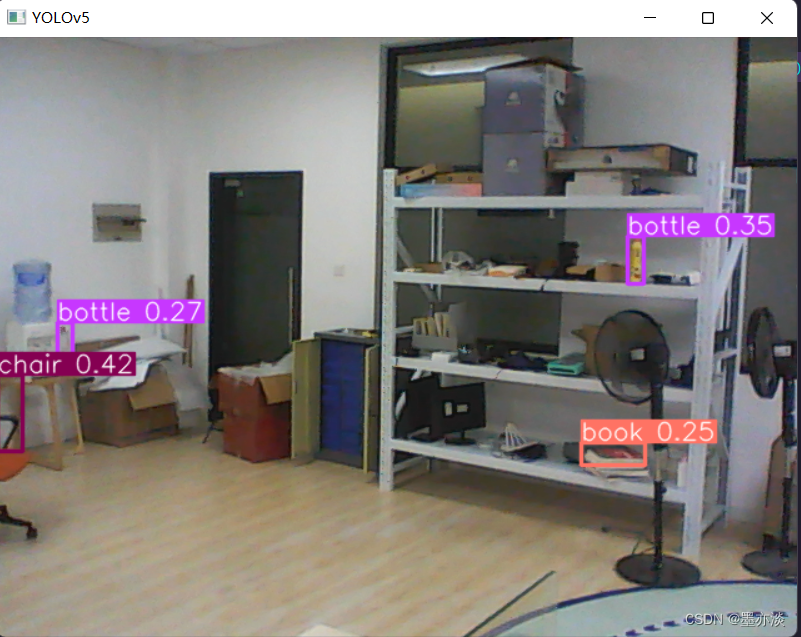
YoloV5实时推理最短的代码
YoloV5实时推理最简单代码
import cv2
import torch# 加载YOLOv5模型
model = torch.hub.load('ultralytics/yolov5', 'yolov5s')# 使用CPU或GPU进行推理
device = 'cuda' if torch.cuda.is_available() else 'cpu'
model.to(device)# 打开摄像头(默认摄像头)
cap = cv2.VideoCapture(0)while True:# 读取摄像头帧ret, frame = cap.read()if not ret:break# 进行推理results = model(frame)# 获取检测结果的图像output_img = results.render()[0]# 显示图像cv2.imshow('YOLOv5', output_img)# 检测键盘输入,按 'q' 键退出循环if cv2.waitKey(1) & 0xFF == ord('q'):break# 释放摄像头并关闭窗口
cap.release()
cv2.destroyAllWindows()- 导入必要的库:
cv2:OpenCV库,用于图像和视频处理。torch:PyTorch库,用于加载和运行YOLOv5模型。
- 加载YOLOv5模型:
- 使用
torch.hub.load函数从指定的GitHub仓库'ultralytics/yolov5'中加载YOLOv5模型'yolov5s'(小型版本)。模型将自动下载并加载。
- 使用
- 确定推理设备:
- 根据系统是否支持CUDA(GPU加速),选择在GPU(‘cuda’)或CPU(‘cpu’)上执行模型推理。
- 打开摄像头:
- 使用
cv2.VideoCapture打开默认的摄像头(通常是计算机内置摄像头或外部摄像头)。
- 使用
- 进入主循环:
- 使用
while True创建一个无限循环,以连续地从摄像头获取帧并进行目标检测。
- 使用
- 读取摄像头帧:
- 使用
cap.read()方法读取摄像头的下一帧图像。ret表示成功与否,frame包含捕获的图像。
- 使用
- 进行推理:
- 将读取的帧传递给YOLOv5模型进行目标检测,结果存储在
results中。
- 将读取的帧传递给YOLOv5模型进行目标检测,结果存储在
- 获取检测结果的图像:
- 使用
results.render()方法获取包含检测框和标签的图像,这里使用索引[0]表示获取第一帧的检测结果。
- 使用
- 显示图像:
- 使用
cv2.imshow()方法在名为’YOLOv5’的窗口中显示检测结果图像。
- 使用
- 检测键盘输入:
- 使用
cv2.waitKey(1)检测键盘输入,等待1毫秒。如果按下键盘上的 ‘q’ 键(ASCII码为0x71),则退出循环。
- 使用
- 释放摄像头并关闭窗口:
- 在循环结束后,释放摄像头资源(
cap.release())并关闭显示窗口(cv2.destroyAllWindows())。
- 在循环结束后,释放摄像头资源(
相关文章:
YoloV5实时推理最短的代码
YoloV5实时推理最简单代码 import cv2 import torch# 加载YOLOv5模型 model torch.hub.load(ultralytics/yolov5, yolov5s)# 使用CPU或GPU进行推理 device cuda if torch.cuda.is_available() else cpu model.to(device)# 打开摄像头(默认摄像头) cap…...
Tensorflow、Pytorch和Ray(张量,计算图)
1.深度学习框架(Tensorflow、Pytorch) 1.1由来 可以追溯到2016年,当年最著名的事件是alphago战胜人类围棋巅峰柯洁,在那之后,学界普遍认为人工智能已经可以在一些领域超过人类,未来也必将可以在更多领域超过…...

TinyWebServer学习笔记-让程序跑起来
目标:通过这个HTTP项目熟悉网络编程 系统:Ubuntu20.04 首先,学习的第一步就是先让程序跑起来,使用git将项目下载到虚拟机内: git clone https://github.com/qinguoyi/TinyWebServer.git 提前把MySQL数据库安装好&am…...

_tkinter.TclError: no display name and no $DISPLAY environment variable 解决
启动kohya_ss时可能会发生错误: _tkinter.TclError: no display name and no $DISPLAY environment variable 解决办法: 1、apt-get install xvfb //安装xvfb // 启动虚拟显示器 2、Xvfb :99 -screen 0 1024x768x16 & export DISPLAY:99 ps aux…...

我出手了!
时光飞逝,程序员小灰这个微信公众号,已经运营整整7年时间了。 在这7年里,小灰输出过各种各样的文章和视频,有讲编程技术的,有讲职业规划的,有讲互联网行业新闻的,也有讲自己个人生活的。 不过&a…...
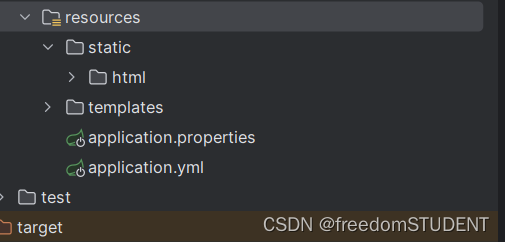
springboot的配置文件(properties和yml/yaml)
springboot的配置文件有两种格式分别是properties和yml/yaml 创建配置文件 在创建springboot项目时候,会默认生成application.properties这种格式 书写风格 端口 application.propertis server.port8080 application.yml server:port: 8080 连接数据库 applica…...

SLAM面试笔记(7) — Linux面试题
目录 问题1:Linux系统基本组件? 问题2:Linux和Unix有什么区别? 问题3:Linux下编译程序 问题4:gcc基本格式和常用指令 问题5:用什么命令查找内存和交换使用情况? 问题6…...

QUIC不是TCP的替代品
QUIC取代了TCP成为HTTP3的基础传输协议,不是因为QUIC能够取代TCP的所有应用场景,而是因为QUIC更适合HTTP的请求/响应业务模型。原文: QUIC Is Not a TCP Replacement TCP新规范(RFC 9293)的发布是网络界的一件大事,值得围绕这一主题发表第二篇…...
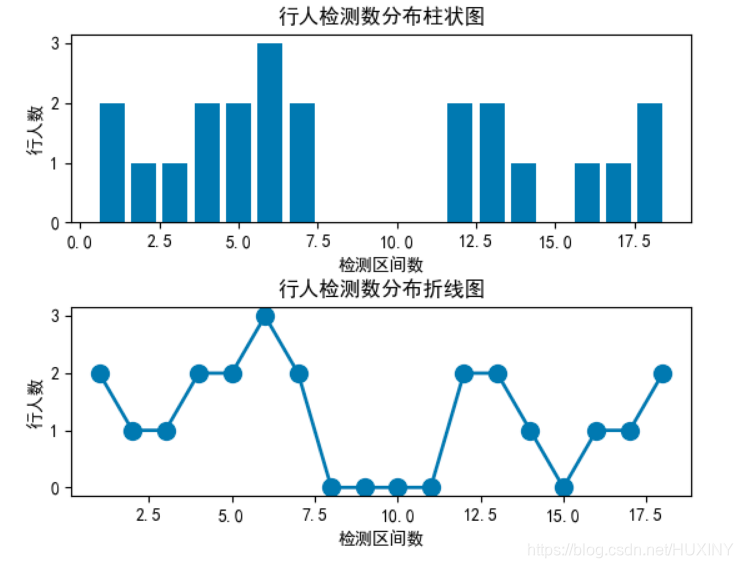
计算机竞赛 目标检测-行人车辆检测流量计数
文章目录 前言1\. 目标检测概况1.1 什么是目标检测?1.2 发展阶段 2\. 行人检测2.1 行人检测简介2.2 行人检测技术难点2.3 行人检测实现效果2.4 关键代码-训练过程 最后 前言 🔥 优质竞赛项目系列,今天要分享的是 行人车辆目标检测计数系统 …...
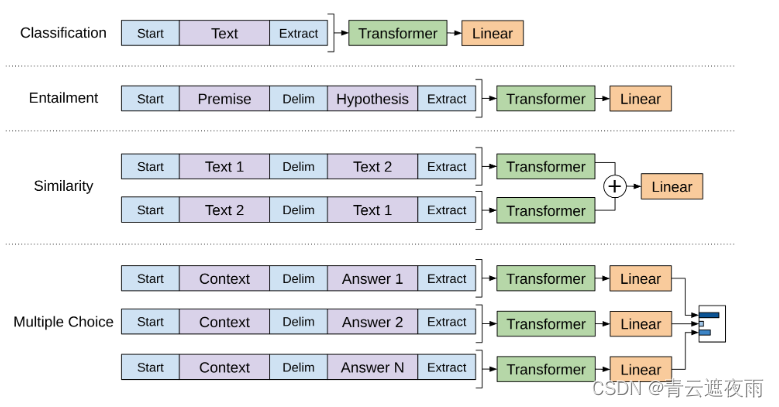
GPT系列模型解读:GPT-1
GPT系列 GPT(Generative Pre-trained Transformer)是一系列基于Transformer架构的预训练语言模型,由OpenAI开发。以下是GPT系列的主要模型: GPT:GPT-1是于2018年发布的第一个版本,它使用了12个Transformer…...

王杰国庆作业day3
父子进程对话 #include <stdio.h> #include <string.h> #include <stdlib.h> #include <my_head.h> int main(int argc, const char *argv[]) {mkfifo("./fifo1",0664);mkfifo("./fifo2",0664);pid_t cpid fork();if(0 < cp…...
量子计算基础知识—Part1
1.什么是量子计算机? 量子计算机是基于量子力学原理构建的机器,采用了一种新的方法来处理信息,从而使其具有超强的功能。量子计算机使用Qubits处理信息。 2. 什么是量子系统? 一个量子系统指的是由量子力学规则描述和控制的物理…...

【PostgreSQL】【存储管理】表和元组的组织方式
外存管理负责处理数据库与外存介质(PostgreSQL8.4.1版本中只支持磁盘的管理操作)的交互过程。在PostgreSQL中,外存管理由SMGR(主要代码在smgr.c中)提供了对外存的统一接口。SMGR负责统管各种介质管理器,会根据上层的请求选择一个具体的介质管理器进行操作…...

VSCode安装图文详解教程
版权声明 本文原创作者:谷哥的小弟作者博客地址:http://blog.csdn.net/lfdfhl 教程说明 本教程旨在详细介绍VSCode的安装过程及其注意事项。 下载VSCode 请在官方网站 https://code.visualstudio.com/ 下载https://code.visualstudio.com/至本地&…...
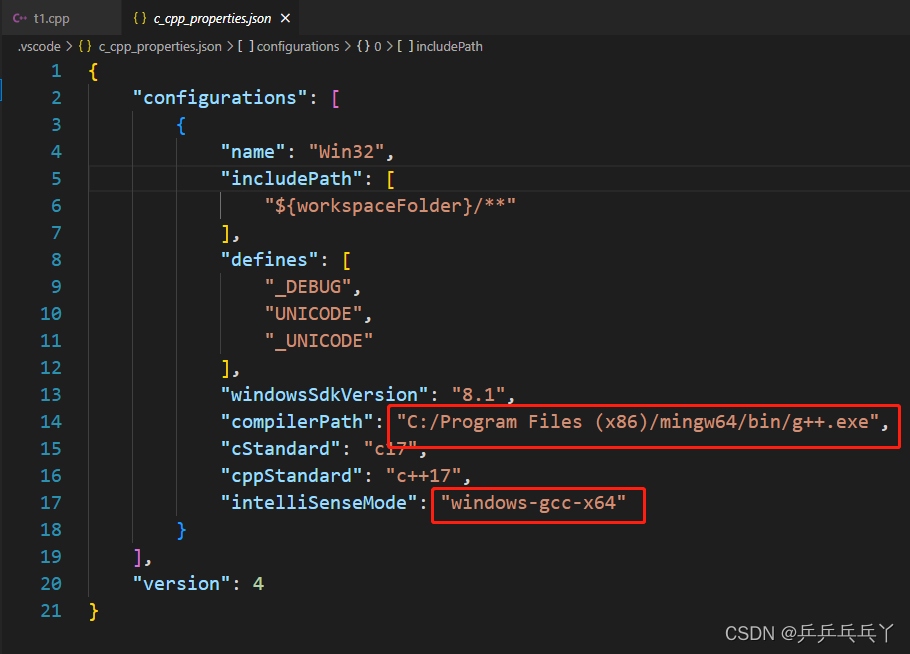
vscode 无法打开源文件
以下是c/c插件的intelligense设置情况: 解决办法: 重新安装vsode无用;重新下载mingw64,管用了!(我猜可能是之前换电脑移植文件的时候导致了部分文件丢失)...
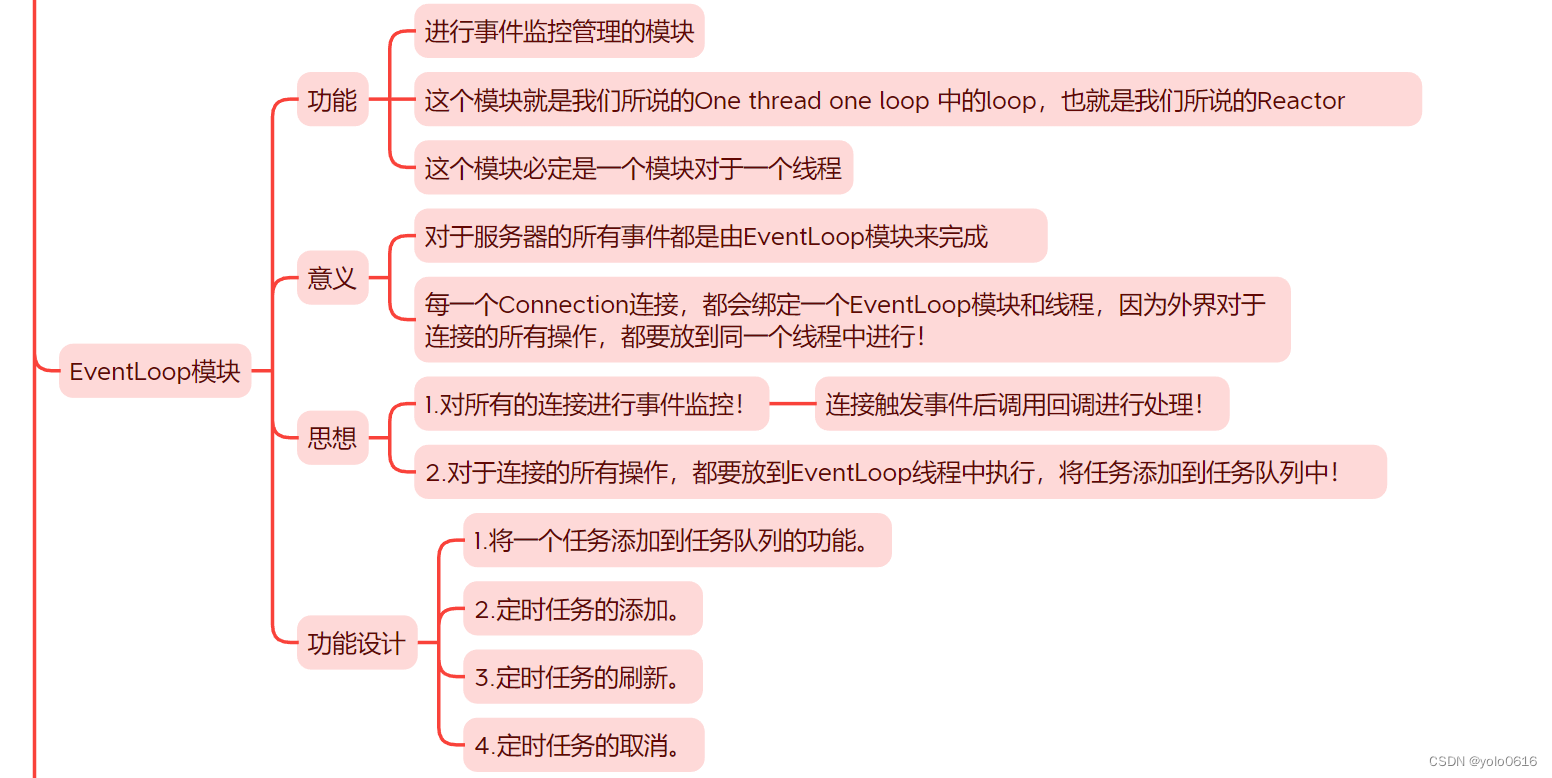
1.8.C++项目:仿muduo库实现并发服务器之eventloop模块的设计
项目完整在: 文章目录 一、eventloop模块:进行事件监控,以及事件处理的模块二、提供的功能三、实现思想(一)功能(二)意义(三)功能设计 四、框架五、代码 一、eventloop模…...

Linux基本指令(二)
💓博主个人主页:不是笨小孩👀 ⏩专栏分类:数据结构与算法👀 C👀 刷题专栏👀 C语言👀 🚚代码仓库:笨小孩的代码库👀 ⏩社区:不是笨小孩👀 🌹欢迎大…...
)
量化交易全流程(五)
本节目录 策略回测 多因子模型 本节主要讨论回测相关的内容,包括两种不同的回测机制,即向量化回测和事件驱动回测;如何灵活使用开源工具来编写自己的回测程序;不同实现方式的优劣对比等。 在我们研究策略的时候,需要…...

聊聊MySQL的InnoDB引擎与MVCC
目录 一、InnoDB引擎 1.1逻辑存储结构 1). 表空间 2). 段 3). 区 4). 页 5). 行 1.2架构 1.2.1内存结构 1). Buffer Pool 2). Change Buffer 3). Adaptive Hash Index 4). Log Buffer 1.2.2磁盘结构 1). System Tablespace 2). File-Per-Table Tablespaces 3). …...
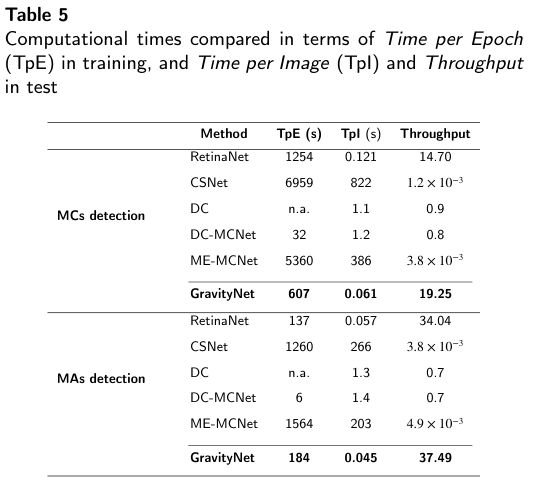
小病变检测:Gravity Network for end-to-end small lesion detection
论文作者:Ciro Russo,Alessandro Bria,Claudio Marrocco 作者单位:University of Cassino and L.M. 论文链接:http://arxiv.org/abs/2309.12876v1 内容简介: 1)方向:医学影像中小病变检测 2࿰…...
)
NotebookLM播客化功能上线即爆火(2024Q2内部灰度测试TOP3功能首次公开)
更多请点击: https://intelliparadigm.com 第一章:NotebookLM文档播客化功能详解 NotebookLM 的文档播客化(Doc-to-Podcast)功能将静态文本内容智能转化为自然流畅的语音叙述,支持多角色配音、语速调节与上下文感知停…...

蓝牙6.0 Channel Sounding 基于接入地址的定时估计原理
基于接入地址的定时估计 先看下core spec的描述:蓝牙Core Spec Vol 6 Part H中 3.2节「基于接入地址的定时估计」,它定义了两种用于CS_SYNC包到达时间(ToA)估计的方法,是RTT测距的基础定时方案。下面我逐段拆解&#x…...

从VMware嵌套虚拟化到NFS共享存储:一份给运维新人的FusionCompute平台搭建避坑实录
从VMware嵌套虚拟化到NFS共享存储:一份给运维新人的FusionCompute平台搭建避坑实录 刚接触云计算平台搭建的运维工程师,往往会被各种专业术语和复杂配置搞得晕头转向。华为FusionCompute作为企业级虚拟化平台,功能强大但入门门槛不低。本文将…...

基于GPT-4与Neo4j构建智能推荐聊天机器人:从原理到实践
1. 项目概述:一个能“读懂”并“修改”数据库的智能聊天机器人 最近在捣鼓一个挺有意思的开源项目,叫 NeoGPT-Recommender 。简单来说,它不是一个普通的聊天机器人,而是一个能真正理解你、并基于你的喜好动态更新知识库的智能助…...

LLM Wiki Bridge:将Markdown知识库编译为AI可操作的概念图谱
1. 项目概述:将你的知识库变成AI的“第二大脑” 如果你和我一样,是个重度笔记用户,大概率也经历过这样的场景:在Obsidian、Logseq或者任何你喜欢的Markdown编辑器里,日积月累了成百上千篇笔记。你清楚地记得自己写过某…...
)
自动化生产管理平台(Automatic)
1,自动化生产管理平台(Automatic) 1.1,重新定义Window样式 添加WindowChrome元素进行自定义定义 <Window x:Class"lzg.Automatic.MainWindow"xmlns"http://schemas.microsoft.com/winfx/2006/xaml/presentation"xmlns:x"…...

Kotlin原生AI Agent框架Koog:多平台、类型安全与生产级实践
1. 从零到一:为什么我们需要一个Kotlin原生的AI Agent框架?如果你是一个长期在JVM生态,特别是Kotlin世界里摸爬滚打的开发者,过去一年里,你肯定没少跟各种AI SDK打交道。无论是OpenAI的官方库,还是LangChai…...

超声引导手术中的‘呼吸’难题:我们如何用体外标记法搞定肝部超声-CT的实时配准?
超声与CT影像实时配准:破解呼吸运动干扰的临床实战方案 在肝癌射频消融或穿刺活检手术中,影像引导的精准度直接决定治疗效果。超声凭借其实时性成为首选引导工具,但图像质量局限常需与高分辨率的CT影像融合。这一过程中,呼吸运动导…...

美国通信业去监管趋势下的技术生态变革与产业应对策略
1. 从“去监管”信号看美国通信业格局重塑 2017年初,当阿吉特派伊(Ajit Pai)正式接任美国联邦通信委员会(FCC)主席时,他的一项早期举措——为广播公司和有线电视运营商削减文书工作规定——几乎在所有人的预…...
)
从手动导入到自动溯源:Perplexity提问→Mendeley定位原文→高亮引用段落→一键生成BibTeX(全流程图解)
更多请点击: https://intelliparadigm.com 第一章:从手动导入到自动溯源:Perplexity提问→Mendeley定位原文→高亮引用段落→一键生成BibTeX(全流程图解) 科研写作中,文献溯源与引用管理长期面临“知其然不…...