Ultra-Fast-Lane-Detection-v2 {后处理优化}//参考
采用三次多项式拟合生成的anchor特征点,在给定的polyfit_draw函数中,degree参数代表了拟合多项式的度数。
具体来说,当我们使用np.polyfit函数进行数据点的多项式拟合时,我们需要指定一个度数。这个度数决定了多项式的复杂度。例如:
-
degree = 1:线性拟合,也就是最简单的直线拟合。拟合的多项式形式为 f(y)=ax+b。 -
degree = 2:二次多项式拟合。拟合的多项式形式为 f(y)=ax2+bx+c。 -
degree = 3:三次多项式拟合。拟合的多项式形式为 f(y)=ax3+bx2+cx+d。
...以此类推。
度数越高,多项式越复杂,可以更准确地拟合数据点,但也更容易过拟合(即模型过于复杂,过于依赖训练数据,对新数据的适应性差)。
import torch, os, cv2
from utils.dist_utils import dist_print
import torch, os
from utils.common import merge_config, get_model
import tqdm
import torchvision.transforms as transforms
from data.dataset import LaneTestDatasetdef pred2coords(pred, row_anchor, col_anchor, local_width = 1, original_image_width = 1640, original_image_height = 590):batch_size, num_grid_row, num_cls_row, num_lane_row = pred['loc_row'].shapebatch_size, num_grid_col, num_cls_col, num_lane_col = pred['loc_col'].shapemax_indices_row = pred['loc_row'].argmax(1).cpu()# n , num_cls, num_lanesvalid_row = pred['exist_row'].argmax(1).cpu()# n, num_cls, num_lanesmax_indices_col = pred['loc_col'].argmax(1).cpu()# n , num_cls, num_lanesvalid_col = pred['exist_col'].argmax(1).cpu()# n, num_cls, num_lanespred['loc_row'] = pred['loc_row'].cpu()pred['loc_col'] = pred['loc_col'].cpu()coords = []row_lane_idx = [1,2]col_lane_idx = [0,3]for i in row_lane_idx:tmp = []if valid_row[0,:,i].sum() > num_cls_row / 2:for k in range(valid_row.shape[1]):if valid_row[0,k,i]:all_ind = torch.tensor(list(range(max(0,max_indices_row[0,k,i] - local_width), min(num_grid_row-1, max_indices_row[0,k,i] + local_width) + 1)))out_tmp = (pred['loc_row'][0,all_ind,k,i].softmax(0) * all_ind.float()).sum() + 0.5out_tmp = out_tmp / (num_grid_row-1) * original_image_widthtmp.append((int(out_tmp), int(row_anchor[k] * original_image_height)))coords.append(tmp)for i in col_lane_idx:tmp = []if valid_col[0,:,i].sum() > num_cls_col / 4:for k in range(valid_col.shape[1]):if valid_col[0,k,i]:all_ind = torch.tensor(list(range(max(0,max_indices_col[0,k,i] - local_width), min(num_grid_col-1, max_indices_col[0,k,i] + local_width) + 1)))out_tmp = (pred['loc_col'][0,all_ind,k,i].softmax(0) * all_ind.float()).sum() + 0.5out_tmp = out_tmp / (num_grid_col-1) * original_image_heighttmp.append((int(col_anchor[k] * original_image_width), int(out_tmp)))coords.append(tmp)return coordsdef polyfit_draw(img, coords, degree=3, color=(144, 238, 144), thickness=2):"""对车道线坐标进行多项式拟合并在图像上绘制曲线。:param img: 输入图像:param coords: 车道线坐标列表:param degree: 拟合的多项式的度数:param color: 曲线的颜色:param thickness: 曲线的宽度:return: 绘制了曲线的图像"""if len(coords) == 0:return imgx = [point[0] for point in coords]y = [point[1] for point in coords]# 对点进行多项式拟合coefficients = np.polyfit(y, x, degree)poly = np.poly1d(coefficients)ys = np.linspace(min(y), max(y), 100)xs = poly(ys)for i in range(len(ys) - 1):start_point = (int(xs[i]), int(ys[i]))end_point = (int(xs[i+1]), int(ys[i+1]))cv2.line(img, start_point, end_point, color, thickness)return imgif __name__ == "__main__":torch.backends.cudnn.benchmark = Trueargs, cfg = merge_config()cfg.batch_size = 1print('setting batch_size to 1 for demo generation')dist_print('start testing...')assert cfg.backbone in ['18','34','50','101','152','50next','101next','50wide','101wide']if cfg.dataset == 'CULane':cls_num_per_lane = 18elif cfg.dataset == 'Tusimple':cls_num_per_lane = 56else:raise NotImplementedErrornet = get_model(cfg)state_dict = torch.load(cfg.test_model, map_location='cpu')['model']compatible_state_dict = {}for k, v in state_dict.items():if 'module.' in k:compatible_state_dict[k[7:]] = velse:compatible_state_dict[k] = vnet.load_state_dict(compatible_state_dict, strict=False)net.eval()img_transforms = transforms.Compose([transforms.Resize((int(cfg.train_height / cfg.crop_ratio), cfg.train_width)),transforms.ToTensor(),transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225)),])if cfg.dataset == 'CULane':splits = ['test0_normal.txt']datasets = [LaneTestDataset(cfg.data_root,os.path.join(cfg.data_root, 'list/test_split/'+split),img_transform = img_transforms, crop_size = cfg.train_height) for split in splits]img_w, img_h = 1570, 660elif cfg.dataset == 'Tusimple':splits = ['test.txt']datasets = [LaneTestDataset(cfg.data_root,os.path.join(cfg.data_root, split),img_transform = img_transforms, crop_size = cfg.train_height) for split in splits]img_w, img_h = 1280, 720else:raise NotImplementedErrorfor split, dataset in zip(splits, datasets):loader = torch.utils.data.DataLoader(dataset, batch_size=1, shuffle = False, num_workers=1)fourcc = cv2.VideoWriter_fourcc(*'MJPG')print(split[:-3]+'avi')vout = cv2.VideoWriter('4.'+'avi', fourcc , 30.0, (img_w, img_h))for i, data in enumerate(tqdm.tqdm(loader)):imgs, names = dataimgs = imgs.cuda()with torch.no_grad():pred = net(imgs)vis = cv2.imread(os.path.join(cfg.data_root,names[0]))coords = pred2coords(pred, cfg.row_anchor, cfg.col_anchor, original_image_width = img_w, original_image_height = img_h)for lane in coords:
# for coord in lane:
# cv2.circle(vis,coord,1,(0,255,0),-1)
# vis = draw_lanes(vis, coords)
# polyfit_draw(vis, lane)vis = polyfit_draw(vis, lane) # 对每一条车道线都使用polyfit_draw函数vout.write(vis)vout.release()ps:
优化前

优化后

显存利用情况

相关文章:
Ultra-Fast-Lane-Detection-v2 {后处理优化}//参考
采用三次多项式拟合生成的anchor特征点,在给定的polyfit_draw函数中,degree参数代表了拟合多项式的度数。 具体来说,当我们使用np.polyfit函数进行数据点的多项式拟合时,我们需要指定一个度数。这个度数决定了多项式的复杂度。例…...

【面试题精讲】Java静态方法和实例方法有何不同?
★ 有的时候博客内容会有变动,首发博客是最新的,其他博客地址可能会未同步,认准https://blog.zysicyj.top ” 首发博客地址[1] 面试题手册[2] 系列文章地址[3] Java 中的静态方法和实例方法在使用和行为上有一些不同之处。 调用方式不同: 静…...
【数据结构】布隆过滤器
布隆过滤器的提出 在注册账号设置昵称的时候,为了保证每个用户昵称的唯一性,系统必须检测你输入的昵称是否被使用过,这本质就是一个key的模型,我们只需要判断这个昵称被用过,还是没被用过。 方法一:用红黑…...

linux基础4---内存
1、什么是内存泄漏,怎么解决内存泄漏? 在嵌入式Linux中,内存泄漏是指由于疏忽或错误,导致一些对象或资源无法被垃圾回收器回收,从而导致内存占用不断增加,最终导致设备性能下降。内存泄漏对程序的影响很大,可能会导致应用程序变慢、崩溃或者消耗大量的内存,最终导致设…...

图论---拓扑排序
概念 一个有向图,如果图中有入度为 0 的点,就把这个点删掉,同时也删掉这个点所连的边。一直进行上面的处理,如果所有点都能被删掉,则这个图可以进行拓扑排序。拓扑排序是对DAG(有向无环图)上的节…...
java Spring Boot 将日志写入文件中记录
我们之前的一套操作来讲 日志都是在控制台上的 但 如果你的项目在正式环境上跑 运维人员突然告诉你说日志报错了,但你日志只在控制台上,那公司项目如果访问量很大 那你是很难在控制台上找到某一条日志的 这时 我们就可以用文件把它记下来 我们打开项目 …...
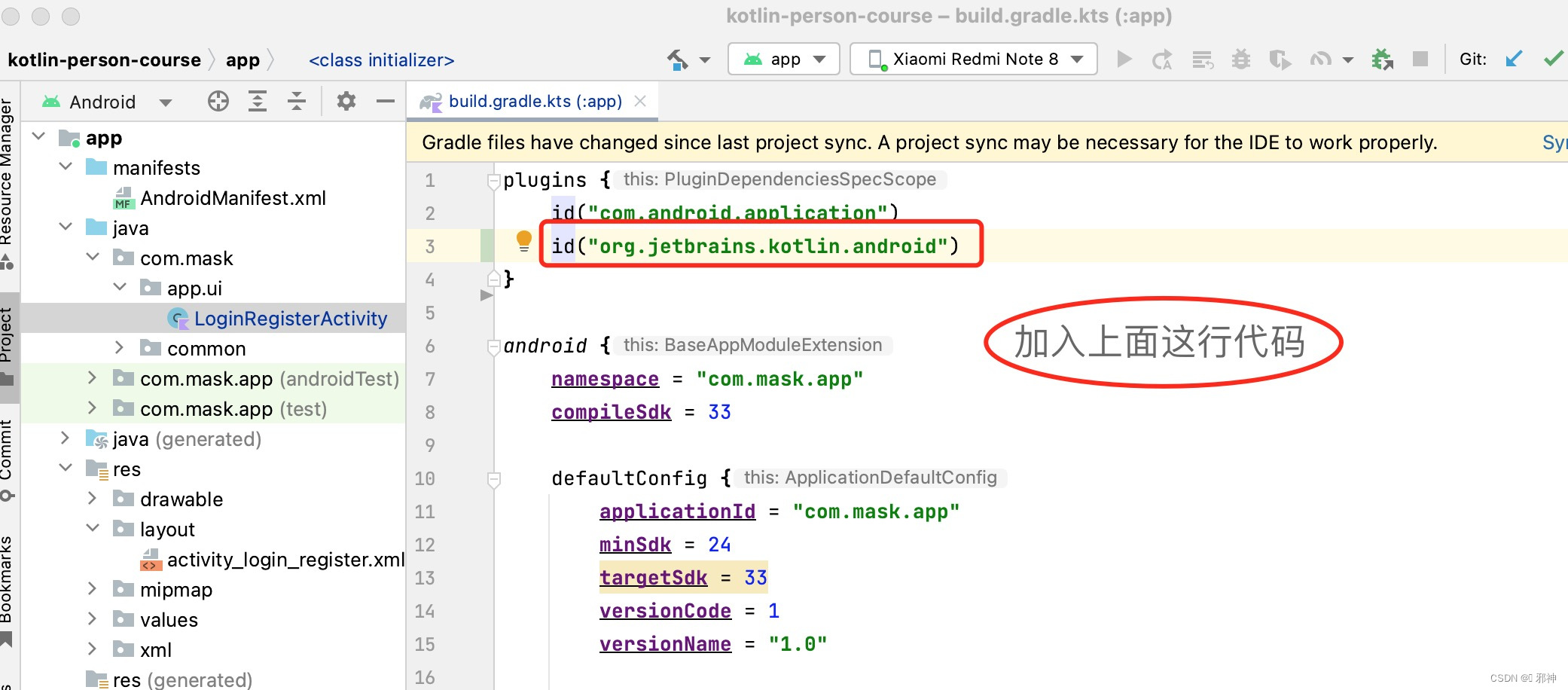
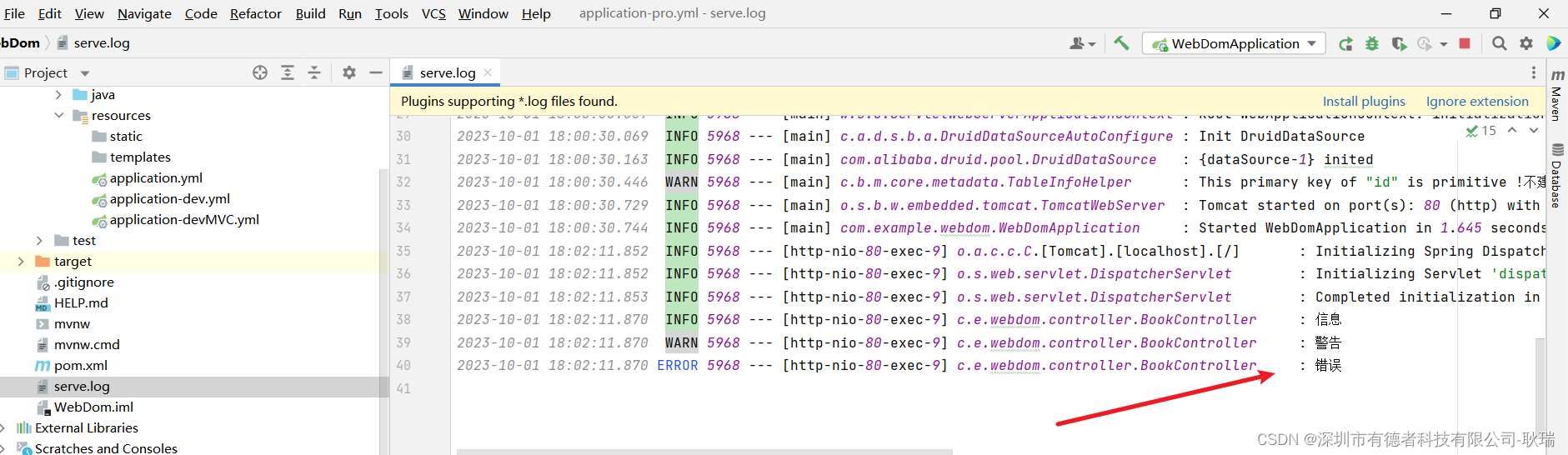
Android 开发错误集合
🔥 开发错误集合一 🔥 Caused by: java.lang.ClassNotFoundException: Didnt find class "com.mask.app.ui.LoginRegisterActivity" on path: DexPathList[[zip file "/data/app/~~NMvHVhj8V6-HwGbh2amXDA/com.mask.app-PWbg4xIlETQ3eVY…...

VSCode个人设置习惯
账号登陆同步 点击左下角齿轮或者用户头像–>Turn on Settings Sync–>全选–>Sign in &Turn on。 可以同步配置、快捷键、插件、用户代码片段、UI状态 Windows下将powershell改为cmd 在vscode打开集成终端,点击右上角加号右边的下拉菜单,…...
 322. 零钱兑换 279.完全平方数)
代码随想录训练营二刷第四十七天 | 70. 爬楼梯 (进阶) 322. 零钱兑换 279.完全平方数
代码随想录训练营二刷第四十七天 | 70. 爬楼梯 (进阶) 322. 零钱兑换 279.完全平方数 一、70. 爬楼梯 (进阶) 题目链接:https://leetcode.cn/problems/climbing-stairs/ 思路:物品是楼梯1和2,…...
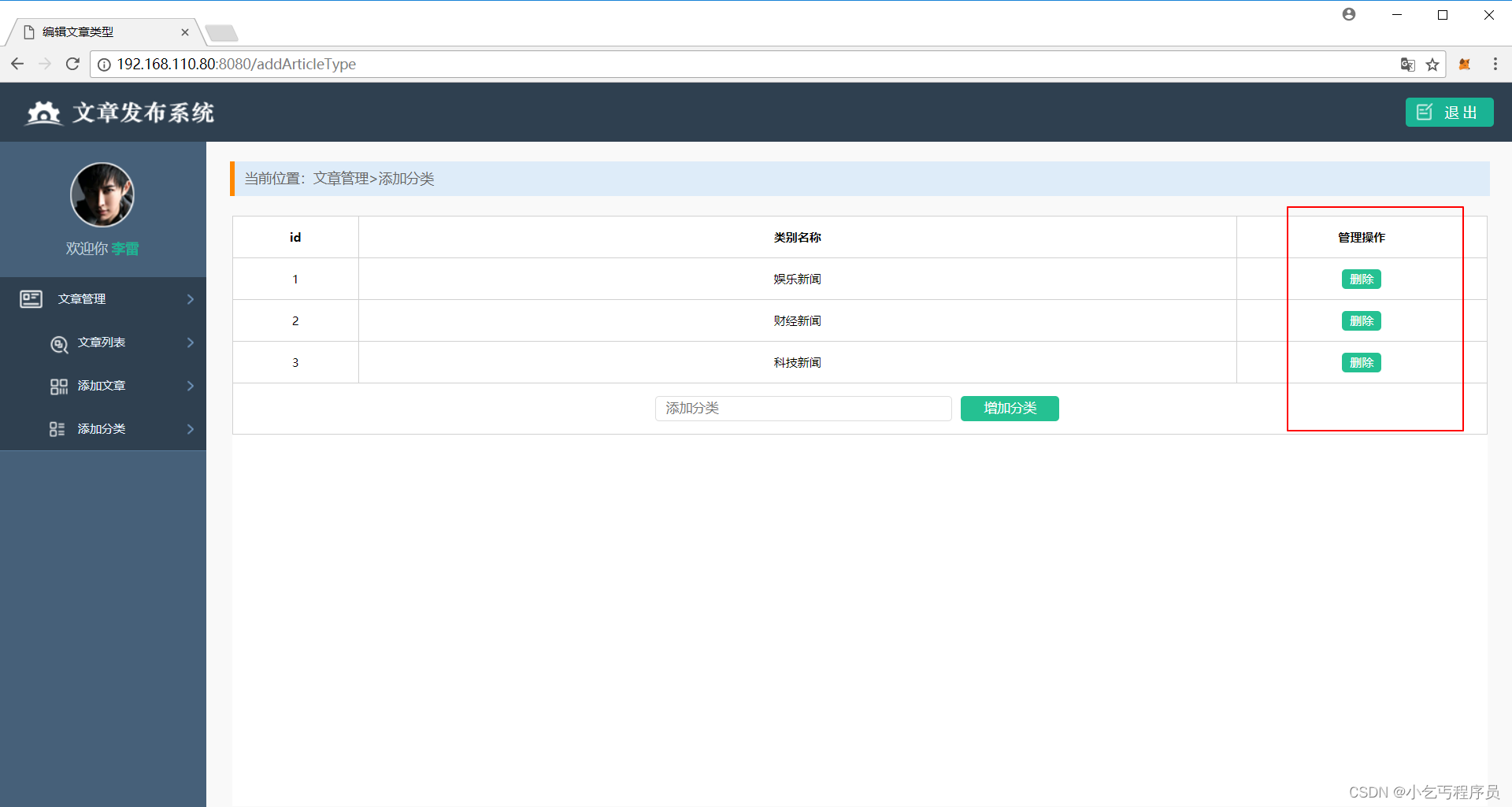
beego-简单项目写法--后续放到git上
Beego案例-新闻发布系统 1.注册 后台代码和昨天案例代码一致。,所以这里面只写一个注册的业务流程图。 **业务流程图 ** 2.登陆 业务流程图 登陆和注册业务和我们昨天登陆和注册基本一样,所以就不再重复写这个代码 但是我们遇到的问题是如何做代码的迁移&…...

【算法|动态规划No.9】leetcodeLCR 091. 粉刷房子
个人主页:兜里有颗棉花糖 欢迎 点赞👍 收藏✨ 留言✉ 加关注💓本文由 兜里有颗棉花糖 原创 收录于专栏【手撕算法系列专栏】【LeetCode】 🍔本专栏旨在提高自己算法能力的同时,记录一下自己的学习过程,希望…...
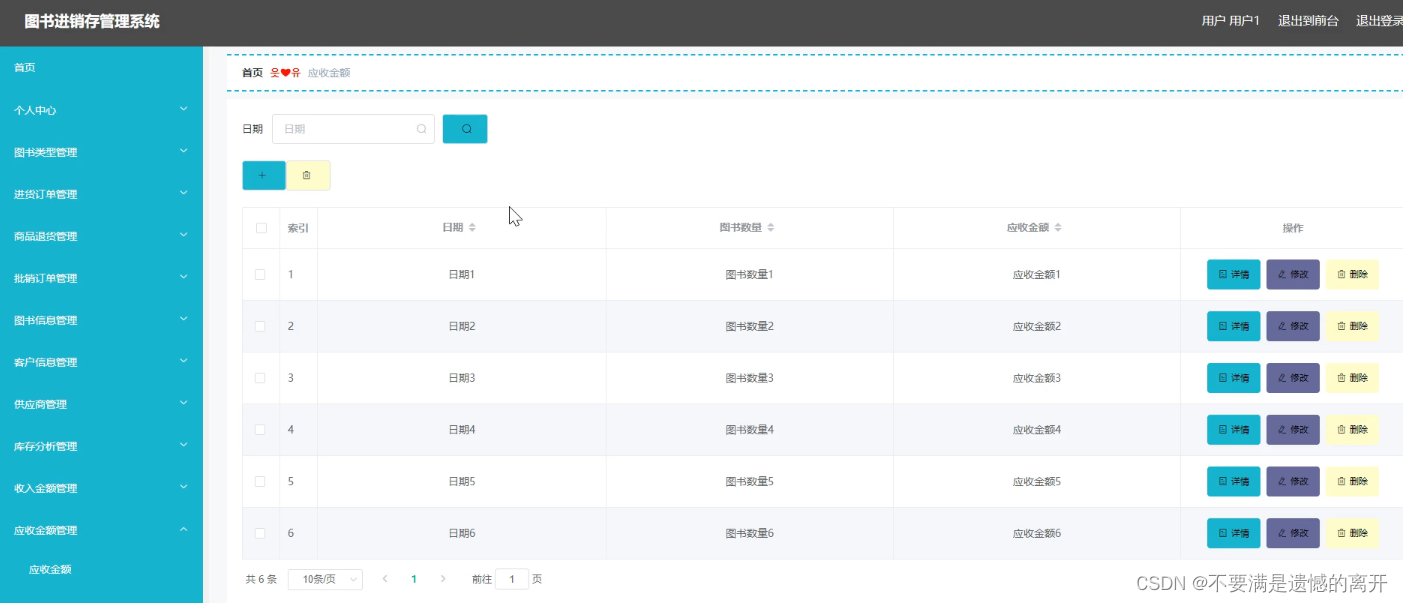
基于SpringBoot的图书进销存管理系统
目录 前言 一、技术栈 二、系统功能介绍 用户信息管理 图书类型管理 商品退货管理 客户信息管理 图书添加 客户添加 应收金额 三、核心代码 1、登录模块 2、文件上传模块 3、代码封装 前言 随着信息技术在管理上越来越深入而广泛的应用,管理信息系统的实…...

回归预测 | MATLAB实现PSO-SVR粒子群优化支持向量机回归多输入单输出预测
回归预测 | MATLAB实现PSO-SVR粒子群优化支持向量机回归多输入单输出预测 目录 回归预测 | MATLAB实现PSO-SVR粒子群优化支持向量机回归多输入单输出预测预测效果基本介绍模型描述程序设计预测效果 <...

vue3使用v-model控制子组件进行双向数据绑定
vue2写法: 中父组件调用子组件: <child :isShow.sync"isShow" v-show"isShow"/> 子组件想要消失, 在子组件写: this.$emit("update:isShow",false); 具体代码就不粘贴了 vue3写法: 父组件核心代码: v-model:a"xxx" 子组…...

.netCore .net5,6,7 存日志文件
如果你使用 .netCore及以上版本(.net5,.net6,.net7)... 系统默认自带日志中间件(log4net) 对,就是上次java 日志大漏洞的兄弟....... 控制台自动打印日志就是它的功劳 现在我们想存日志文件,怎么办 很简单. 1.在项目中添加日志配置文件 文件名 : log4net.config 不能…...
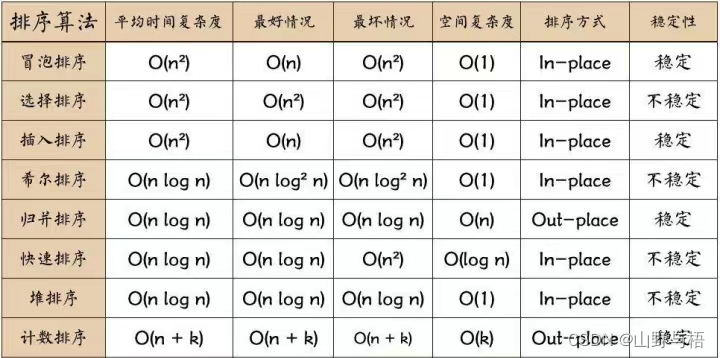
【数据结构---排序】很详细的哦
本篇文章介绍数据结构中的几种排序哦~ 文章目录 前言一、排序是什么?二、排序的分类 1.直接插入排序2.希尔排序3.选择排序4.冒泡排序5.快速排序6.归并排序总结 前言 排序在我们的生活当中无处不在,当然,它在计算机程序当中也是一种很重要的操…...
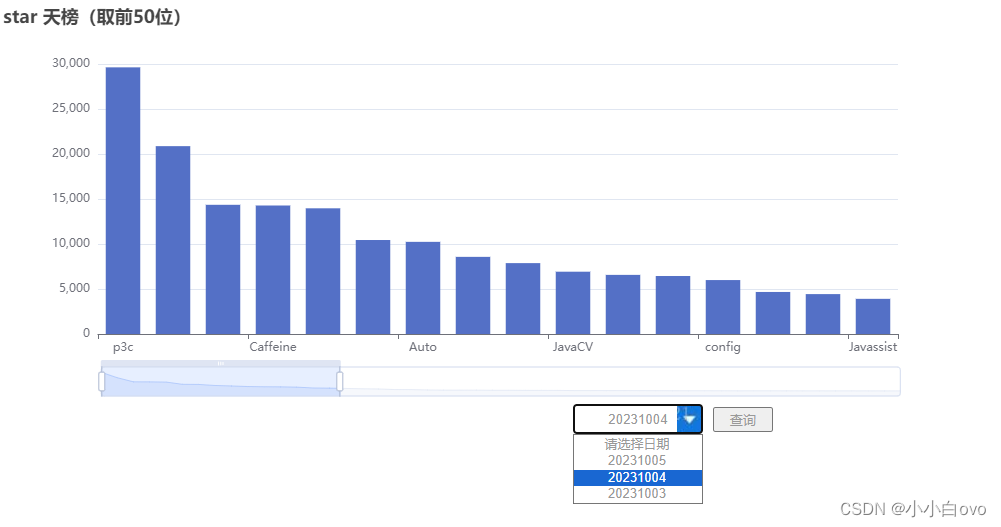
GitHub爬虫项目详解
前言 闲来无事浏览GitHub的时候,看到一个仓库,里边列举了Java的优秀开源项目列表,包括说明、仓库地址等,还是很具有学习意义的。但是大家也知道,国内访问GitHub的时候,经常存在访问超时的问题,…...
-NOA领航辅助系统-上汽荣威)
辅助驾驶功能开发-功能对标篇(7)-NOA领航辅助系统-上汽荣威
1.横向对标参数 厂商上汽荣威车型荣威RX5(燃油车)上市时间2022Q3方案10V3R摄像头前视摄像头1*(8M)侧视摄像头4后视摄像头1环视摄像头4DMS摄像头1雷达毫米波雷达34D毫米波雷达/超声波雷达12激光雷达/域控供应商1*(宏景智驾)辅助驾驶软件供应商地平线高精度地图中海庭芯片J3合作…...

第0次 序言
突然想起有好多书没有看,或者看了也没留下任何记录,以后有空必须得好好整理才行,这次就从《Linux命令行和shell脚本编程大全开始》 本文完全是闲聊,自娱自乐,我觉得做开发是一件很快乐的事情,但是工作是开发…...

ESP32设备驱动-OLED显示单个或多个DS18B20传感器数据
OLED显示单个或多个DS18B20传感器数据 文章目录 OLED显示单个或多个DS18B20传感器数据1、DS18B20介绍2、硬件准备3、软件准备4、代码实现4.1 读取单个DS18B20数据4.2 驱动多个DS18B20传感器4.3 OLED显示DS18B20数据在本文中,我们将介绍如何ESP32驱动单个或多个DS18B20传感器,…...

HTTP自适应流媒体技术解析:从HLS/DASH原理到实战部署
1. 流媒体技术演进:从“下载后播放”到“自适应缓冲”每天我们打开手机或电脑,点开一个视频,看到那个旋转的加载圈,心里总会咯噔一下。这个被称为“缓冲”的现象,早已成为数字生活的一部分。但你是否想过,为…...

webpack-starter 终极指南:如何快速使用 ESLint 和 Stylelint 提升前端代码质量
webpack-starter 终极指南:如何快速使用 ESLint 和 Stylelint 提升前端代码质量 【免费下载链接】webpack-starter ✨ A lightweight foundation for your next webpack based frontend project. 项目地址: https://gitcode.com/gh_mirrors/we/webpack-starter …...

绝巧弃利之后,ABAP 才回到可升级的常道
老子说「绝圣弃智,民利百倍;绝仁弃义,民复孝慈;绝巧弃利,盗贼无有」。这句话放到 SAP ABAP 开发里,不能理解成不要知识、不要规范、不要技巧。ABAP 项目从来离不开知识,也离不开严密的工程纪律。它真正提醒我们的是,当一个系统过度崇拜个人聪明、过度依赖补救式道德、过…...

Godot MCP服务器:AI助手与游戏开发工作流的高效集成方案
1. 项目概述:为什么我们需要一个更好的Godot MCP?如果你是一个Godot引擎的开发者,尤其是当你尝试将AI能力集成到你的游戏开发工作流中时,你很可能听说过或者用过MCP(Model Context Protocol)。简单来说&…...

历史周期律的动力学本质:集体意识场视角下的文明演进规律
引言 历史周期律——王朝兴替、文明盛衰、社会变革的波浪式重复——是人类文明最令人困惑又最无法回避的现象。从司马迁的“天下大势,分久必合,合久必分”,到汤因比的文明挑战-回应理论,无数先贤试图揭示这一规律的底层逻辑。然而…...

Void编辑器:轻量级插件化架构与LSP/Tree-sitter深度集成解析
1. 项目概述:一个为“创造者”而生的现代编辑器最近在开发者社区里,一个名为“Void”的编辑器项目引起了我的注意。它不像那些我们耳熟能详的庞然大物,比如 VS Code 或 Sublime Text,一上来就带着庞大的生态和复杂的功能。Void 给…...
选型指南:从业务问题出发的指标匹配方法)
网络中心性(Centrality)选型指南:从业务问题出发的指标匹配方法
1. 为什么 centrality 不是“算出来就行”,而是网络分析的命脉所在在 R 里敲下centr_degree(g)或closeness(g),几毫秒就出结果——但如果你真以为这就完成了“节点重要性评估”,那大概率会在后续建模、解释或决策中栽跟头。我带过七届数据科学…...

大语言模型不确定性量化与可靠性评估:从理论到工程实践
1. 项目概述与核心价值最近在整理大语言模型落地应用中的一些棘手问题时,我反复被一个词绊住脚:不确定性。无论是让模型生成一份市场分析报告,还是回答一个具体的编程问题,我们得到的答案看起来总是那么“自信满满”,但…...

KeyMapper终极指南:重新定义Android设备按键功能的完整教程
KeyMapper终极指南:重新定义Android设备按键功能的完整教程 【免费下载链接】KeyMapper An Android app to remap the buttons on your devices 项目地址: https://gitcode.com/gh_mirrors/ke/KeyMapper 你是否曾想过自定义Android设备的按键功能?…...

抖音下载器技术架构解析:多策略异步下载系统的设计与实现
抖音下载器技术架构解析:多策略异步下载系统的设计与实现 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback su…...