cartographer(1)-运行
1.下载数据集
#1.下载数据集:
mkdir /home/tang/bagfiles#2.开始二维建图
cd /home/tang/carto_ws/cartographer_detailed_comments_ws/install_isolated/source install_isolated/setup.bash
rospack profile #新装的包索引地址存在ros的环境里
roslaunch cartographer_ros lx_rs16_2d_outdoor.launch#3.lx_rs16_2d_outdoor.launch
文件存在的目录: /home/tang/carto_ws/cartographer_detailed_comments_ws/src/cartographer_ros/cartographer_ros/launch/cartographer_ros/参数:
<!-- bag的地址与名称 --><arg name="bag_filename" default="$(env HOME)/bagfiles/rslidar-outdoor-gps-notf.bag"/>
$(env HOME)相对路径的设置方式:
环境变量:
| root | tang | |
| ~./bashrc区别 | 100行 当前用户有效 | 117行 当前用户有效 |
| env命令 | 两个用户运行出来的结果完全一样 | |
| 修改/etc/profile | 所有用户有效 export HOME=/home/tang source /etc/profile | 此文件里一堆bash |
| 修改 /etc/enviroment | 所有用户有效 HOME="/home/tang" reboot | PATH的值 |
| 配置文件里的调用方式: $(env HOME) |
#1.查看环境变量
echo $PATH #命令的搜索路径
echo $HOME #用户的主工作路径
echo $LOGNAME #当前登录的用户名
echo $HOSTNAME #主机名
#2.设置临时环境变量 关闭终端时这个变量就会消失了。
export MYTESTENV=/home/tang/test # 设置变量
echo $MYTESTENV # 读取变量
env |grep MYENVTEST # 读取变量
vim /etc/profile # 打开文件 并没有写入到文件中
vim /etc/envirment # 打开文件 并没有写入到文件中
#如果要设置永久的还是要写入到文件中#3.
保存地图:
# 保存地图
# 保存地址为终端运行命令的目录 /home/tangrosrun map_server map_saver
map.pgm map.yaml#如果出现没找到包map_server
sudo apt-get install ros-noetic-map-server

1.通过脚本保存2d地图:
脚本的目录: ~/carto_ws/cartographer_detailed_comments_ws/finish_slam_2d.sh
apt install ros-noetic-rqt*
plugins->introspection->Node Graph
2.通过脚本保存3d地图
查看README
~/carto_ws/cartographer_detailed_comments_ws/README.md
# 纯定位模式
roslaunch cartographer_ros lx_rs16_2d_outdoor_localization.launch3. 3d 建图
roslaunch cartographer_ros lx_rs16_3d.launch4. 通过pcl来点云可视化
apt install pcl-tools
cd ~/carto_ws/map
pcl_viewer b3_1.pcd相关文章:
cartographer(1)-运行
1.下载数据集 #1.下载数据集: mkdir /home/tang/bagfiles#2.开始二维建图 cd /home/tang/carto_ws/cartographer_detailed_comments_ws/install_isolated/source install_isolated/setup.bash rospack profile #新装的包索引地址存在ros的环境里 roslaunch ca…...
C++:模板进阶与继承
模板进阶与继承 模板进阶1.非类型的模板参数2.模板的特化2.1特化的概念2.2函数模板特化2.3类模板特化2.4全特化和偏特化2.4.1全特化2.4.2偏特化 3.模板的分离编译3.1同文件分离3.2不同文件下分离 继承1.继承的概念和定义1.1继承的概念1.2继承的定义1.2.1定义格式1.2.2继承关系和…...

vue-img-cutter 实现图片裁剪[vue 组件库]
借助 vue-img-cutter 可以在网页端实现图片裁剪功能,最终功能效果如下: 组件 npm 安装 npm install vue-img-cutter2 --save-dev # for vue2 npm install vue-img-cutter3 --save-dev # for vue3vue-img-cutter使用 template模板标签模块,…...

手把手教你从零开始腾讯云服务器部署(连接建站教程)
使用腾讯云服务器搭建网站全流程,包括轻量应用服务器和云服务器CVM建站教程,轻量可以使用应用镜像一键建站,云服务器CVM可以通过安装宝塔面板的方式来搭建网站,腾讯云服务器网txyfwq.com分享使用腾讯云服务器建站教程,…...
微信开放平台第三方开发,实现代小程序备案申请
大家好,我是小悟 微信小程序备案整体流程总共分为五个环节:备案信息填写、平台初审、工信部短信核验、通管局审核和备案成功。 服务商可以代小程序发起备案申请。在申请小程序备案之前,需要确保小程序基本信息已填写完成、小程序至少存在一个…...

设计模式——11. 享元模式
1. 说明 享元模式(Flyweight Pattern)是一种结构型设计模式,它旨在减少系统中相似对象的内存占用或计算开销,通过共享相同的对象来达到节省资源的目的。 享元模式的核心思想是将对象的状态分为内部状态(Intrinsic State)和外部状态(Extrinsic State): 内部状态是对象…...
【LLM】主流大模型体验(文心一言 科大讯飞 字节豆包 百川 阿里通义千问 商汤商量)
note 智谱AI体验百度文心一言体验科大讯飞大模型体验字节豆包百川智能大模型阿里通义千问商汤商量简要分析:仅从测试“老婆饼为啥没有老婆”这个问题的结果来看,chatglm分点作答有条理(但第三点略有逻辑问题);字节豆包…...
CSS小计
1:设置图片随窗缩放 使用百分比 width: 100%;height: 100%; 使用vmin: 将可视区域分为100vmin width: 100vmin;height: 100vmin; 2:设置字体颜色与背景色融合 mix-blend-mode: difference 3: 设置宽度自适应 width:fit-content 4:外边距合并 当两个相领的两个容…...
机器学习:决策树
决策树 决策树是一种基于树形结构的模型,决策树从根节点开始,一步步走到叶子节点(决策),所有的数据最终都会落到叶子节点,既可以做分类也可以做回归。 特征选择 根节点的选择该用哪一个特征呢ÿ…...
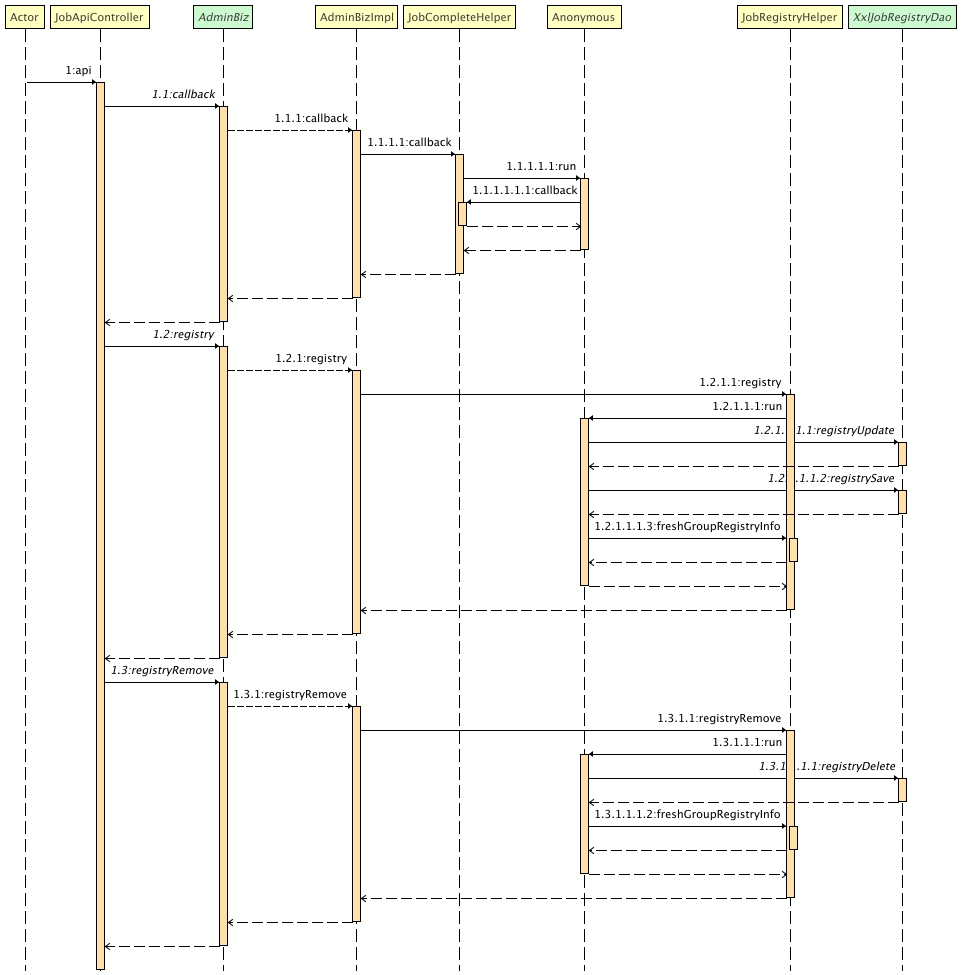
xxl-job的原理(2)—调度中心管理注册信息
一、调度中心管理注册信息 1.JobApiController 执行器调用调度中心的url来实现注册、下线、回调等操作;其主要的实现类是JobApiController,调用/api/registry接口注册执行器信息,调用/api/registryRemove接口下线执行器信息,调用…...
----神经网络)
小白入门pytorch(二)----神经网络
本文为🔗[小白入门Pytorch]学习记录博客 文章目录 前言一、神经网络的组成部分1.神经元2.神经网络层3.损失函数4.优化器 二、Pytorch构建神经网络中的网络层全连接层2.卷积层3.池化层4.循环神经网络5.转置卷积层6.归一化层7.激活函数层 三、数据加载与预处理1.数据加…...

【进阶C语言】排序函数(qsort)与模拟实现(回调函数的实例)
本章大致内容目录: 1.认识回调函数 2.排序函数qsort 3.模拟实现qsort 回调函数为C语言重要知识点,以函数指针为主要知识;下面介绍回调函数的定义、回调函数的库函数举例即库函数模拟实现。 一、回调函数 1.回调函数定义 回调函数就是一…...

CentOS 7 上编译和安装 SQLite 3.9.0
文章目录 可能报错分析详细安装过程 可能报错分析 报错如下: django.core.exceptions.ImproperlyConfigured: SQLite 3.9.0 or later is required (found 3.7.17). 原因:版本为3.7.太低了,需要升级到3.9.0至少 详细安装过程 1.安装所需的…...

[GXYCTF2019]禁止套娃 无回显 RCE 过滤__FILE__ dirname等
扫除git 通过githack 获取index.php <?php include "flag.php"; echo "flag在哪里呢?<br>"; if(isset($_GET[exp])){if (!preg_match(/data:\/\/|filter:\/\/|php:\/\/|phar:\/\//i, $_GET[exp])) {if(; preg_replace(/[a-z,_]\(…...

Springboot使用Aop保存接口请求日志到mysql
1、添加aop依赖 <!-- aop日志 --><dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-aop</artifactId></dependency> 2、新建接口保存数据库的实体类RequestLog.java package com.example…...
网络安全面试题汇总(附答案)
作为从业多年的网络安全工程师,我深知在面试过程中面试官所关注的重点及考察的技能点。网络安全作为当前信息技术领域中非常重要的一部分,对于每一个从事网络安全工作的人员来说,不仅需要掌握一定的技术能力,更需要具备全面的综合…...

Centos7安装kvm,配置虚拟机网络
1.安装软件包,禁用防火墙(非必须) yum -y install qemu-kvm libvirt virt-install 1)禁用防火墙(非必须) systemctl stop firewalld systemctl disable firewalld 2)禁用NetworkManager syst…...

Javascript文件上传
什么是文件上传 文件上传包含两部分, 一部分是选择文件,包含所有相关的界面交互。一部分是网络传输,通过一个网络请求,将文件的数据携带过去,传递到服务器中,剩下的,在服务器中如何存储…...
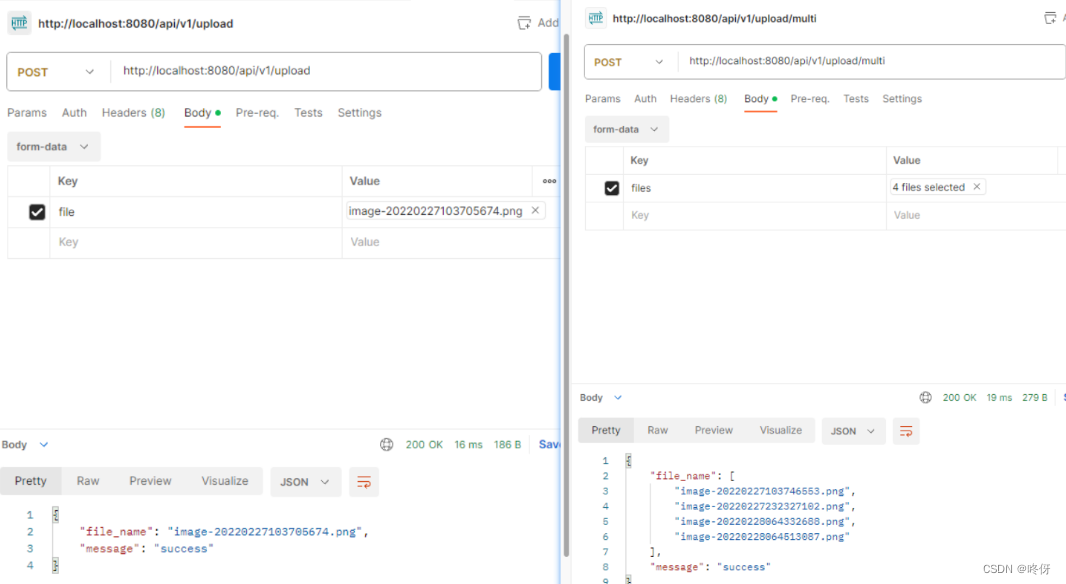
golang gin——文件上传(单文件,多文件)
文件上传 单文件上传 从form-data获取文件 package uploadimport ("github.com/gin-gonic/gin""net/http" ) // 单文件上传,多文件上传 func Upload(c *gin.Context) {file, _ : c.FormFile("file") // file为字段名dst : "…...

面试题:Redis和MySQL的事务区别是什么?
大家好,我是小米!今天我要和大家聊聊一个在技术面试中经常被问到的问题:“Redis和MySQL的事务区别是什么?”这个问题看似简单,但实际上涉及到了数据库和缓存两个不同领域的知识,让我们一起来深入了解一下吧…...

基于Unity的地牢游戏开发
1.数字字符串转数字System.Globalization.NumberStyles hexNum; // 专门的枚举成员,解析16进制字符串 hexNum System.Globalization.NumberStyles.HexNumber;int.Parse(tileNums[i], hexNum);2.注意:文件读取是从上到下,而 Unity y轴 …...

2026职场进阶:数据分析技能的价值与应用
一、数据分析在职场中的核心价值市场需求增长:2026年企业对数据驱动决策的需求持续上升,数据分析成为跨行业通用技能。薪资竞争力:掌握数据分析能力的人才平均薪资高于同岗位非技术背景从业者。职业扩展性:从运营、市场到产品经理…...

HEC-RAS 5.0.7实战:从模型结果到ArcGIS,一步步教你生成并导出淹没范围SHP文件
HEC-RAS 5.0.7与ArcGIS联合作战:专业级淹没分析全流程指南 水利工程师在完成HEC-RAS模型计算后,常面临一个关键挑战:如何将模拟结果转化为实际项目所需的GIS数据?本文将以HEC-RAS 5.0.7为例,详细拆解从模型结果到ArcGI…...

无王无帝定乾坤,来自田间第一人 海棠山铁哥持道定天下
无王无帝定乾坤 ——来自田间第一人千古以来,世人皆认为天下安定、乾坤稳固,必靠帝王集权、朝堂号令、强权治世。 王朝兴替往复,霸业起落无常,靠权柄维系的盛世终难长久,靠杀伐平定的世道终存隐患。 权力会更迭&#x…...

Rime中州韵配置避坑指南:从安装小狼毫到实现Emoji、花字、彩色文本的完整流程
Rime中州韵配置避坑指南:从安装小狼毫到实现Emoji、花字、彩色文本的完整流程 第一次接触Rime输入法的用户,往往会被其高度定制化的特性所吸引——无论是动态状态栏、彩色候选词,还是随心所欲的Emoji混输,都让人眼前一亮。但当真…...

RK3562核心板开发指南:从硬件设计到AI部署的全流程解析
1. 项目概述:从一颗芯片到一套完整的开发资源最近在嵌入式圈子里,RK3562这颗芯片的热度持续攀升。作为瑞芯微面向中高端AIoT和工业应用推出的新一代处理器,它凭借其均衡的CPU/GPU/NPU性能和出色的能效比,吸引了不少开发者的目光。…...

Orange Pi 3B深度评测:RK3566创客板在边缘AI与家庭服务器中的应用实战
1. 项目概述:一块“搅局”的创客板最近,Orange Pi 3B的发布在创客圈和嵌入式开发者社区里激起了一阵不小的波澜。官方打出的“创客价”这个标签,更是精准地戳中了许多硬件爱好者和项目开发者的心。简单来说,Orange Pi 3B是一款基于…...

Python核心技术难点与实战案例解析
Python核心技术难点梳理与实战落地案例解析 一、前言 Python凭借简洁易懂的语法、丰富齐全的第三方库、跨平台运行优势,成为当下后端开发、数据分析、自动化运维、人工智能等领域的主流编程语言。在实际项目开发与学习过程中,多数开发者常会遇到语法细节…...

抖音下载器实战指南:告别手动保存,批量获取无水印内容
抖音下载器实战指南:告别手动保存,批量获取无水印内容 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fal…...
)
数据结构第8章查找:单元测试15题全解析(顺序查找+折半查找+分块查找+哈希查找)
第8章 查找 单元测试1. 线性表只有以( A )方式存储,才能进行折半查找。A. 顺序B. 链接C. 二叉树D. 关键字有序的2. 有序表为{2,4,10,13,33,42,46,64&#x…...