深度学习笔记之优化算法(四)Nesterov动量方法的简单认识
机器学习笔记之优化算法——Nesterov动量方法的简单认识
- 引言
- 回顾:梯度下降法与动量法
- Nesterov动量法
- Nesterov动量法的算法过程描述
- 总结
引言
上一节对动量法进行了简单认识,本节将介绍 Nesterov \text{Nesterov} Nesterov动量方法。
回顾:梯度下降法与动量法
关于梯度下降法的迭代步骤描述如下:
θ ⇐ θ − η ⋅ ∇ θ J ( θ ) \theta \Leftarrow \theta - \eta \cdot \nabla_{\theta} \mathcal J(\theta) θ⇐θ−η⋅∇θJ(θ)
以标准二次型 f ( x ) = x T Q x , Q = ( 0.5 0 0 20 ) , x = ( x 1 , x 2 ) T f(x) = x^T \mathcal Qx,\mathcal Q = \begin{pmatrix} 0.5 \quad 0 \\ 0 \quad 20 \end{pmatrix},x = (x_1,x_2)^T f(x)=xTQx,Q=(0.50020),x=(x1,x2)T为目标函数,使用梯度下降法求解目标函数 f ( x ) f(x) f(x)最小值的迭代过程如下:

很明显,由于 Q \mathcal Q Q的原因,导致在算法迭代过程中,迭代更新点对应的 Hessian Matrix ⇒ ∇ 2 f ( ⋅ ) \text{Hessian Matrix} \Rightarrow \nabla^2 f(\cdot) Hessian Matrix⇒∇2f(⋅)中的条件数都较大,从而使梯度下降法在该凸二次函数中的收敛速度沿着次线性收敛的方向退化,这也是图像中迭代路径震荡、折叠严重的主要原因。
这里仅观察少量几次迭代步骤,见下面局部图:

其中红色线表示梯度下降法在迭代过程中的更新方向;以第一次迭代的更新方向为例,将该方向进行分解,可以得到上述两个方向分量。
由于目标函数 f ( x ) f(x) f(x)中 x x x是一个二维向量,因而在上图中的蓝色箭头分别描述了该方向在 x 1 , x 2 x_1,x_2 x1,x2正交基上的分量。
从上述两个分量可以看出:
- 关于横轴分量,它一直指向前方,也就是最优解的方向;
- 而造成迭代过程震荡、折叠的是纵轴分量。
综上,从观察的角度描述迭代路径震荡折叠现象严重的原因在于:横轴上的分量向前跨越的步幅很小;相比之下,纵轴上的分量上下的波动很大。针对该现象,可以得到相应的优化思路:
具体效果见下图绿色实心箭头,其中第一步红色与绿色实线箭头重合,因为在初始化过程中通常将动量向量初始化为零向量导致,这里以第二次迭代为例进行描述。图中的红色虚线表示梯度下降法当前迭代步骤在横轴、纵轴上的分量;绿色虚线则表示优化思路在当前步骤在横轴、纵轴上的分量。
- 压缩纵轴分量上的波动幅度;
- 拉伸/延长横轴分量上的步幅,从而使其更快地达到极值点;

如何从数学角度达到这样的效果:利用过去迭代步骤中的梯度数据,对当前迭代步骤的梯度信息进行修正。继续观察第二次迭代步骤:

在第一次迭代步骤结束后,我们得到了一个历史梯度的分量信息,即图中的蓝色虚线;在执行第二次迭代步骤时,我们需要将该步骤的梯度分量与相应的历史梯度分量执行加权运算:
- 观察纵轴分量:由于历史纵轴分量与当前纵轴分量方向相反(红色、蓝色虚线垂直箭头),这势必会缩减当前迭代步骤的纵轴分量;
- 相反,观察横轴分量:历史横轴分量与当前横轴分量方向相同(红色、蓝色虚线横向箭头),这必然会扩张当前迭代步骤的横轴分量;
如何对历史梯度信息进行描述,我们需要引入一个新的变量 m m m,用于累积历史梯度信息:
{ m t = m t − 1 + ∇ θ ; t − 1 J ( θ t − 1 ) θ t = θ t − 1 − η ⋅ m t \begin{cases} m_{t} = m_{t-1} + \nabla_{\theta;t-1} \mathcal J(\theta_{t-1}) \\ \theta_t = \theta_{t-1} - \eta \cdot m_t \end{cases} {mt=mt−1+∇θ;t−1J(θt−1)θt=θt−1−η⋅mt
上式的 m t m_t mt确实达到了历史迭代步骤梯度累积的作用,但同样衍生出了新的问题:上面步骤仅是将历史梯度信息完整地存储进来,如果迭代步骤较多的情况下,由于历史信息在累积过程中没有任何的丢失,最终可能导致:迭代步骤较深时,初始迭代步骤的历史梯度信息对当前时刻梯度的更新没有参考价值。相反,有可能会给当前迭代步骤引向错误的方向。因而关于 m t m_t mt的调整方式表示如下:
{ m t = β ⋅ m t − 1 + ( 1 − β ) ⋅ ∇ θ ; t − 1 J ( θ t − 1 ) θ t = θ t − 1 − η ⋅ m t \begin{cases} m_t = \beta \cdot m_{t-1} + (1 - \beta) \cdot \nabla_{\theta;t-1} \mathcal J(\theta_{t-1}) \\ \theta_t = \theta_{t-1} - \eta \cdot m_t \end{cases} {mt=β⋅mt−1+(1−β)⋅∇θ;t−1J(θt−1)θt=θt−1−η⋅mt
关于上式的迭代加权运算被称作指数加权移动平均法。假设 β = 0.9 \beta = 0.9 β=0.9,关于 m t m_t mt的表示如下:
m t = 0.9 × m t − 1 + 0.1 × ∇ θ ; t − 1 J ( θ t − 1 ) = 0.9 × [ 0.9 × m t − 2 + 0.1 × ∇ θ ; t − 2 J ( θ t − 2 ) ] + 0.1 × ∇ θ ; t − 1 J ( θ t − 1 ) = ⋯ = 0.1 × 0. 9 0 × ∇ θ ; t − 1 J ( θ t − 1 ) + 0.1 × 0. 9 1 × ∇ θ ; t − 2 J ( θ t − 2 ) + 0.1 × 0. 9 2 × ∇ θ ; t − 3 J ( θ t − 3 ) + ⋯ + 0.1 × 0. 9 t − 1 × ∇ θ ; 1 J ( θ 1 ) \begin{aligned} m_t & = 0.9 \times m_{t-1} + 0.1 \times \nabla_{\theta;t-1} \mathcal J(\theta_{t-1}) \\ & = 0.9 \times \left[0.9 \times m_{t-2} + 0.1 \times \nabla_{\theta;t-2} \mathcal J(\theta_{t-2}) \right] + 0.1 \times \nabla_{\theta;t-1} \mathcal J(\theta_{t-1}) \\ & = \cdots \\ & = 0.1 \times 0.9^0 \times \nabla_{\theta;t-1} \mathcal J(\theta_{t-1}) + 0.1 \times 0.9^1 \times \nabla_{\theta;t-2} \mathcal J(\theta_{t-2}) + 0.1 \times 0.9^2 \times \nabla_{\theta;t-3} \mathcal J(\theta_{t-3}) + \cdots + 0.1 \times 0.9^{t-1} \times \nabla_{\theta;1} \mathcal J(\theta_1) \end{aligned} mt=0.9×mt−1+0.1×∇θ;t−1J(θt−1)=0.9×[0.9×mt−2+0.1×∇θ;t−2J(θt−2)]+0.1×∇θ;t−1J(θt−1)=⋯=0.1×0.90×∇θ;t−1J(θt−1)+0.1×0.91×∇θ;t−2J(θt−2)+0.1×0.92×∇θ;t−3J(θt−3)+⋯+0.1×0.9t−1×∇θ;1J(θ1)
很明显,距离当前迭代步骤越近的梯度,其保留权重越大;反之,随着迭代步骤的推移,越靠近初始迭代步骤的梯度权重越小。
这让我想起了 GRU \text{GRU} GRU神经网络~
这种方法就是动量法,也被称作冲量法。
Nesterov动量法
关于梯度下降法的优化,不仅可以像动量法一样考虑历史迭代步骤的梯度信息,实际上,我们同样可以超前参考未来的梯度信息。
关于动量法在某迭代步骤中的更新过程示例如下:

- 其中黄色结点表示动量法在迭代过程中的更新位置;淡蓝色曲线表示理想状态下的下降路径;
- 其中红色实线表示梯度下降法的更新方向;蓝色实线表示历史梯度构成的冲量信息;
很明显,当前迭代步骤的梯度方向与更新点处更高线的切线相垂直~
假设 β = 0.5 \beta = 0.5 β=0.5,图中的橘黄色虚线表示加权后真正的更新方向。我们不否认:此时动量法相比纯粹的梯度下降法,其下降路径更接近理想状态路径。两者比对效果如下:
很明显,梯度下降法不仅多使用一次迭代步骤,并且最后结果依然不及两步的动量法。

但即便动量法有更优的下降路径,但依然距离理想状态下的下降路径存在差距。
假设:在动量法执行完第一次迭代步骤前,就已经预估到了未来步骤的位置信息,那么通过未来步骤加权的第一次迭代的位置信息会进一步得到修正。从数学角度观察 Nesterov \text{Nesterov} Nesterov动量法是如何实现超前参考的。回顾动量法公式:
{ m t = β ⋅ m t − 1 + ( 1 − β ) ⋅ ∇ θ ; t − 1 J ( θ t − 1 ) θ t = θ t − 1 − η ⋅ m t \begin{cases} m_t = \beta \cdot m_{t-1} + (1 - \beta) \cdot \nabla_{\theta;t-1} \mathcal J(\theta_{t-1}) \\ \theta_t = \theta_{t-1} - \eta \cdot m_t \end{cases} {mt=β⋅mt−1+(1−β)⋅∇θ;t−1J(θt−1)θt=θt−1−η⋅mt
其中 ∇ θ ; t − 1 J ( θ t − 1 ) \nabla_{\theta;t-1} \mathcal J(\theta_{t-1}) ∇θ;t−1J(θt−1)表示当前迭代步骤 t t t的梯度信息;而 Nesterov \text{Nesterov} Nesterov动量法是将上一迭代步骤的 θ t − 1 ⇐ θ t − 1 + γ ⋅ m t − 1 \theta_{t-1} \Leftarrow \theta_{t- 1} + \gamma \cdot m_{t-1} θt−1⇐θt−1+γ⋅mt−1,从而得到一个新时刻的未知的权重信息,并使用该信息替换 θ t − 1 \theta_{t-1} θt−1参与运算:
之所以是新时刻,或者说是未来时刻,是因为当前迭代步骤的 θ t \theta_t θt还没有被解出来,而 θ t − 1 + γ ⋅ m t − 1 \theta_{t-1} + \gamma \cdot m_{t-1} θt−1+γ⋅mt−1又确实是超越了 t − 1 t-1 t−1迭代步骤的新信息。
{ m t = β ⋅ m t − 1 + ( 1 − β ) ⋅ ∇ θ ; t − 1 J ( θ t − 1 + γ ⋅ m t − 1 ) θ t = θ t − 1 − η ⋅ m t \begin{cases} m_t = \beta \cdot m_{t-1} + (1 - \beta) \cdot \nabla_{\theta;t-1} \mathcal J(\theta_{t-1} + \gamma \cdot m_{t-1}) \\ \theta_t = \theta_{t-1} - \eta \cdot m_t \end{cases} {mt=β⋅mt−1+(1−β)⋅∇θ;t−1J(θt−1+γ⋅mt−1)θt=θt−1−η⋅mt
继续观察上式:关于超前信息 θ t − 1 + γ ⋅ m t − 1 \theta_{t-1} + \gamma \cdot m_{t-1} θt−1+γ⋅mt−1,它的格式与 θ t = θ t − 1 − η ⋅ m t \theta_t = \theta_{t-1} - \eta \cdot m_{t} θt=θt−1−η⋅mt非常相似,相当于该超前信息是 θ t − 1 \theta_{t-1} θt−1与 m t − 1 m_{t-1} mt−1之间的加权方向。
为简化起见,这里仅描述一步: t − 1 ⇒ t t-1 \Rightarrow t t−1⇒t
- 初始状态下,下图描述的是动量法的一次迭代步骤;红色实线表示 ∇ θ ; t − 1 ∇ J ( θ t − 1 ) \nabla_{\theta;t-1} \nabla \mathcal J(\theta_{t-1}) ∇θ;t−1∇J(θt−1);蓝色实线表示 m t − 1 m_{t-1} mt−1,中间的橙黄色虚线表示两者的加权结果 m t = β ⋅ m t − 1 + ( 1 − β ) ⋅ ∇ θ ; t − 1 J ( θ t − 1 ) m_t = \beta \cdot m_{t-1} + (1 - \beta) \cdot \nabla_{\theta;t-1} \mathcal J(\theta_{t-1}) mt=β⋅mt−1+(1−β)⋅∇θ;t−1J(θt−1)

- 那么超前信息 θ t − 1 + γ ⋅ m t − 1 \theta_{t-1} + \gamma \cdot m_{t-1} θt−1+γ⋅mt−1如何表示 ? ? ?假设图中 θ t − 1 \theta_{t-1} θt−1到红色点的长度为 γ ⋅ m t − 1 \gamma \cdot m_{t-1} γ⋅mt−1,那么红色点的位置就是超前信息的位置:

- 至此,可以描述 ∇ θ ; t − 1 J ( θ t − 1 + γ ⋅ m t − 1 ) \nabla_{\theta;t-1} \mathcal J(\theta_{t-1} + \gamma \cdot m_{t-1}) ∇θ;t−1J(θt−1+γ⋅mt−1)的方向:过红色点,与目标函数等高线相垂直的方向。
图中的红色虚线表示∇ θ ; t − 1 J ( θ t − 1 + γ ⋅ m t − 1 ) \nabla_{\theta;t-1} \mathcal J(\theta_{t-1} + \gamma \cdot m_{t-1}) ∇θ;t−1J(θt−1+γ⋅mt−1)的方向,仔细观察可以发现,它与∇ θ ; t − 1 J ( θ t − 1 ) \nabla_{\theta;t-1} \mathcal J(\theta_{t-1}) ∇θ;t−1J(θt−1)描述的红色实线之间存在一丢丢的偏移,不是平行的~

- 接下来,将红色虚线替代红色实线,并得到 Nesterov \text{Nesterov} Nesterov动量法中的 m t = β ⋅ m t − 1 + ( 1 − β ) ⋅ ∇ θ ; t − 1 J ( θ t − 1 + γ ⋅ m t − 1 ) m_{t} = \beta \cdot m_{t-1} + (1 - \beta) \cdot \nabla_{\theta;t-1} \mathcal J(\theta_{t-1} + \gamma \cdot m_{t-1}) mt=β⋅mt−1+(1−β)⋅∇θ;t−1J(θt−1+γ⋅mt−1):
橙黄色虚线指向的红色点表示Nesterov \text{Nesterov} Nesterov动量法中的经过η \eta η修饰的m t m_t mt结果(这里暂定η \eta η不变的情况下),我们仍可以看出,相比于动量法, Nesterov \text{Nesterov} Nesterov动量法在迭代过程中能够更偏向理想状态下降路径。

Nesterov动量法的算法过程描述
基于 Nesterov \text{Nesterov} Nesterov动量法的随机梯度下降的算法步骤表示如下:
初始化操作:
- 学习率 η \eta η,动量因子 γ \gamma γ;
- 初始化参数 θ \theta θ,初始动量 m m m;
算法过程:
- While \text{While} While没有达到停止准则 do \text{do} do
- 从训练集 D \mathcal D D中采集出包含 k k k个样本的小批量: { ( x ( i ) , y ( i ) ) } i = 1 k \{(x^{(i)},y^{(i)})\}_{i=1}^k {(x(i),y(i))}i=1k;
- 应用临时的超前参数 θ ^ \hat \theta θ^:
θ ^ ⇐ θ + γ ⋅ m \hat \theta \Leftarrow \theta + \gamma \cdot m θ^⇐θ+γ⋅m - 使用超前参数 θ ^ \hat \theta θ^计算该位置的梯度信息:
G ⇐ 1 k ∑ i = 1 k ∇ θ L [ f ( x ( i ) ; θ ^ ) , y ( i ) ] \mathcal G \Leftarrow \frac{1}{k} \sum_{i=1}^k \nabla_{\theta} \mathcal L[f(x^{(i)};\hat \theta),y^{(i)}] G⇐k1i=1∑k∇θL[f(x(i);θ^),y(i)] - 计算动量更新:
m ⇐ γ ⋅ m − η ⋅ G m \Leftarrow \gamma \cdot m - \eta \cdot \mathcal G m⇐γ⋅m−η⋅G - 计算参数 θ \theta θ更新:
θ ⇐ θ + m \theta \Leftarrow \theta + m θ⇐θ+m - End While \text{End While} End While
总结
观察上述算法过程,可以发现:虽然我们更新的是 θ \theta θ,但整个算法至始至终都没有求解 θ \theta θ的梯度: ∇ θ J ( θ ) \nabla_{\theta} \mathcal J(\theta) ∇θJ(θ),也就是说: m m m中的历史信息也均是超前梯度 ∇ θ J ( θ + γ ⋅ m ) \nabla_{\theta} \mathcal J(\theta + \gamma \cdot m) ∇θJ(θ+γ⋅m)构成的历史信息。
Reference \text{Reference} Reference:
“随机梯度下降、牛顿法、动量法、Nesterov、AdaGrad、RMSprop、Adam”,打包理解对梯度下降的优化
深度学习(花书) P182 8.3.2 \text{P182 8.3.2} P182 8.3.2动量; 8.3.3 nesterov \text{8.3.3 nesterov} 8.3.3 nesterov动量
相关文章:
深度学习笔记之优化算法(四)Nesterov动量方法的简单认识
机器学习笔记之优化算法——Nesterov动量方法的简单认识 引言回顾:梯度下降法与动量法Nesterov动量法Nesterov动量法的算法过程描述总结 引言 上一节对动量法进行了简单认识,本节将介绍 Nesterov \text{Nesterov} Nesterov动量方法。 回顾:…...

比 N 小的最大质数
系列文章目录 进阶的卡莎C++_睡觉觉觉得的博客-CSDN博客数1的个数_睡觉觉觉得的博客-CSDN博客双精度浮点数的输入输出_睡觉觉觉得的博客-CSDN博客足球联赛积分_睡觉觉觉得的博客-CSDN博客大减价(一级)_睡觉觉觉得的博客-CSDN博客小写字母的判断_睡觉觉觉得的博客-CSDN博客纸币(…...

JavaScript 生成随机颜色
代码 function color(color) {return (color "0123456789abcdef"[Math.floor(Math.random() * 6)]) && (color.length 6 ? color : arguments.callee(color)); }使用 // 用法1:全部随机生成 "#" color(""); // #201050…...

Savepoints
语法 SAVEPOINT 名称 RELEASE SAVEPOINT 名称 ROLLBACK TRANSACTION TO SAVEPOINT 名称 Savepoints 与BEGIN和COMMIT类似的创建事务的方法,名称不要求唯一且可以嵌套使用。 可以用在BEGIN…COMMIT定义的事务内部或外部。当在外部时,最外层的savepoin…...
【MySQL】基本查询(二)
文章目录 一. 结果排序二. 筛选分页结果三. Update四. Delete五. 截断表六. 插入查询结果结束语 操作如下表 //创建表结构 mysql> create table exam_result(-> id int unsigned primary key auto_increment,-> name varchar(20) not null comment 同学姓名,-> chi…...
Qt:多语言支持,构建全面应用程序“
Qt:强大API、简化框架、多语言支持,构建全面应用程序" 强大的API:Qt提供了丰富的API,包括250多个C类,基于模板的集合、序列化、文件操作、IO设备、目录管理、日期/时间等功能。还包括正则表达式处理和支持2D/3D…...

性能监控-链路级监控工具
常见的链路监控工具,我们都称之为 APM 开源工具 几个开源的好用的工具,它们分别是 Pinpoint、SkyWalking、Zipkin、CAT 网络上也有人对这几个工具做过测试 比对,得到的结论是每个产品对性能的影响都在 10% 以下,其中 SkyWalking …...

clickonce 程序发布到ftp在使用cnd 加速https 支持下载,会不会报错
ClickOnce 是一种用于发布和部署.NET应用程序的技术,通常用于本地部署或通过网络分发应用程序。将 ClickOnce 程序发布到 FTP 服务器并使用 CDN(内容分发网络)进行加速是可能的,但要确保配置正确以避免出现错误。 在使用 CDN 加速…...
Nginx详细学习记录
1. Nginx概述 Nginx是一个轻量级的高性能HTTP反向代理服务器,同时它也是一个通用类型的代理服务器,支持绝大部分协议,如TCP、UDP、SMTP、HTTPS等。 1.1 Nginx基础架构 Nginx默认采用多进程工作方式,Nginx启动后,会运行…...
golang gin——中间件编程以及jwt认证和跨域配置中间件案例
中间件编程jwt认证 在不改变原有方法的基础上,添加自己的业务逻辑。相当于grpc中的拦截器一样,在不改变grpc请求的同时,插入自己的业务。 简单例子 func Sum(a, b int) int {return a b }func LoggerMiddleware(in func(a, b int) int) f…...
如何快速制作令人惊叹的长图海报
在当今的数字时代,制作一张吸引人的长图海报已成为许多人的需求。无论是为了宣传活动,还是展示产品,一张设计精美的长图海报都能引起人们的注意。下面,我们将介绍一种简单的方法,使用在线海报制作工具来创建长图海报。…...
 : DS循环链表—约瑟夫环(Ver. I - A))
D (1092) : DS循环链表—约瑟夫环(Ver. I - A)
Description N个人坐成一个圆环(编号为1 - N),从第S个人开始报数,数到K的人出列,后面的人重新从1开始报数。依次输出出列人的编号。 例如:N 3,K 2,S 1。 2号先出列,然…...

Python爬虫(二十二)_selenium案例:模拟登陆豆瓣
本篇博客主要用于介绍如何使用seleniumphantomJS模拟登陆豆瓣,没有考虑验证码的问题,更多内容,请参考:Python学习指南 #-*- coding:utf-8 -*-from selenium import webdriver from selenium.webdriver.common.keys import Keysimp…...
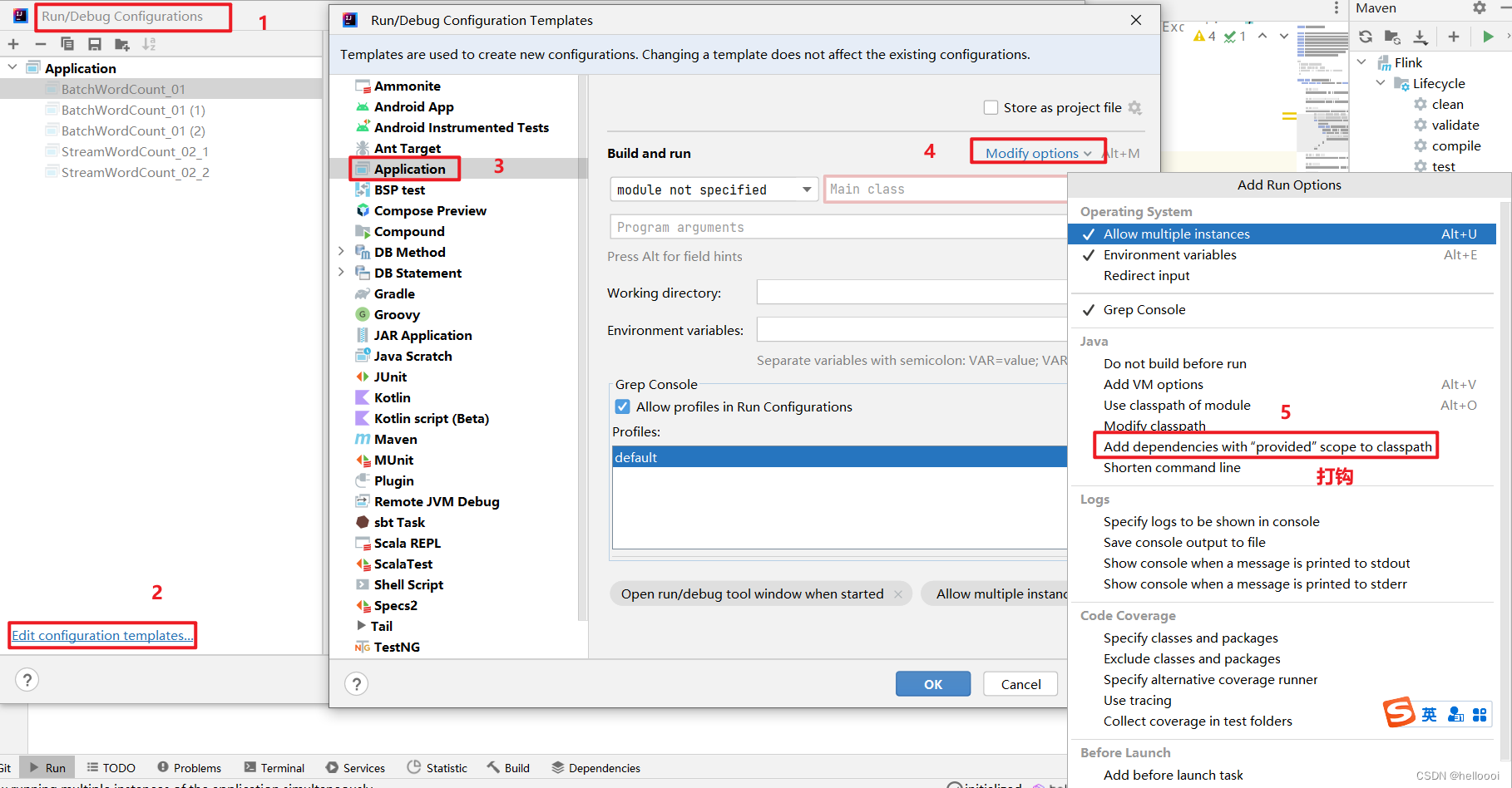
1. Flink程序打Jar包
文章目录 步骤注意事项 步骤 用 maven 打 jar 包,需要在 pom.xml 文件中添加打包插件依赖 <build><plugins><plugin><groupId>org.apache.maven.plugins</groupId><artifactId>maven-shade-plugin</artifactId><ver…...

水波纹文字效果动画
效果展示 CSS 知识点 text-shadow 属性绘制立体文字clip-path 属性来绘制水波纹 工具网站 CSS clip-path maker 效果编辑器 页面整体结构实现 使用多个 H2 标签来实现水波纹的效果实现,然后使用clip-path结合动画属性一起来进行波浪的起伏动画实现。 <div …...

【1.1】神经网络:关于神经网络的介绍
✅作者简介:大家好,我是 Meteors., 向往着更加简洁高效的代码写法与编程方式,持续分享Java技术内容。 🍎个人主页:Meteors.的博客 💞当前专栏: 神经网络(随缘更新) ✨特色…...
java项目中git的.ignore文件设置
在Git中,ignore是用来指定Git应该忽略的故意不被追踪的文件。它并不影响已经被Git追踪的文件。我们可以通过.ignore文件在Git中指定要忽略的文件。 当我们执行git add命令时,Git会检查.gitignore文件,并自动忽略这些文件和目录。这样可以避免…...

11.3 读图举例
一、低频功率放大电路 图11.3.1所示为实用低频功率放大电路,最大输出功率为 7 W 7\,\textrm W 7W。其中 A \textrm A A 的型号为 LF356N, T 1 T_1 T1 和 T 3 T_3 T3 的型号为 2SC1815, T 4 T_4 T4 的型号为 2SD525, T 2…...
黑马JVM总结(二十八)
(1)语法糖-foreach (2)语法糖-switch-string (3)语法糖-switch-enum (4)语法糖-枚举类 枚举类 (5)语法糖-twr1...

2023年DDoS攻击发展趋势的分析和推断
DDoS是一种非常“古老”的网络攻击技术,随着近年来地缘政治冲突对数字经济格局的影响,DDoS攻击数量不断创下新高,其攻击的规模也越来越大。日前,安全网站Latest Hacking News根据DDoS攻击防护服务商Link11的统计数据,对…...

低空经济公司官网与宣传材料常见的5个问题:为什么看起来先进却不够可信
在B2B企业的品牌升级和内容分发中,“低空经济公司官网与宣传材料常见的5个问题:为什么看起来先进却不够可信”不是一个单点问题,而是关系到客户理解效率、销售推进效率和品牌长期信任感的系统问题。低空经济企业在表达上最容易走向一个误区&a…...

别再手动导数据了!用Python的pandas+pyarrow,3行代码搞定Parquet转JSON
3行代码解锁数据自由:用Python极简实现Parquet到JSON的优雅转换 数据工程师的日常总是与格式转换纠缠不清。当你在凌晨两点收到紧急需求:"立刻把数据仓库里50GB的用户行为Parquet文件转成JSON供下游系统调用",是选择打开文档逐行编…...

告别网盘下载烦恼:3步解锁9大网盘高效下载新体验
告别网盘下载烦恼:3步解锁9大网盘高效下载新体验 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘 …...

在嵌入式c项目中集成大模型能力taotoken的稳定api调用方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在嵌入式C项目中集成大模型能力:基于Taotoken的稳定API调用方案 应用场景类,针对嵌入式或资源受限的C语言开…...

AWPLC与AWTK MVVM实战:零代码实现嵌入式走马灯控制与界面开发
1. 项目概述与核心思路作为一名在嵌入式领域摸爬滚打了十多年的老工程师,我见过太多项目因为GUI开发和逻辑控制分离而陷入泥潭。前端UI要调,后端逻辑要改,两边工程师还得不断对齐接口,效率低下不说,出点bug排查起来更是…...

基于加速度计与舵机的自由落体检测滑翔机设计与实现
1. 项目概述:一个基于自由落体检测的自动减速滑翔机如果你对嵌入式硬件、传感器应用或者简单的物理模型感兴趣,那么这个项目绝对能让你玩上一下午。它的核心想法非常直观:我们利用一块内置了加速度计的微控制器板(Circuit Playgro…...

别再“另存为”了!职场人90%的无效内耗都源于这一个操作。企业文档如何管理?
加班到晚上八点,职场人小林终于改完了项目方案,随手点了“另存为”,命名为“方案_最终版.doc“后发到了工作群。本以为可以安心下班,群里却炸锅了:“小林,你这个最终版和我手里的不一样啊?”“我…...

如何彻底解决Windows电脑自动锁屏问题:终极鼠标模拟工具使用指南
如何彻底解决Windows电脑自动锁屏问题:终极鼠标模拟工具使用指南 【免费下载链接】mousejiggler Mouse Jiggler is a very simple piece of software whose sole function is to "fake" mouse input to Windows, and jiggle the mouse pointer back and f…...

ChatGPT对话导出工具:一键保存结构化对话记录到Markdown
1. 项目概述:一个帮你“打包”对话记录的工具如果你经常使用ChatGPT的网页版进行深度对话,无论是用它来辅助编程、学习新知识,还是进行创意写作,你可能会遇到一个共同的痛点:那些充满价值的对话记录,被“锁…...
)
你的差速小车为什么画圈不准?可能是数学模型离散化没搞对(避坑指南)
差速小车控制精度优化:从数学模型离散化到工程实践 差速轮式机器人作为移动机器人领域的经典平台,其控制精度直接影响路径跟踪、自主导航等核心功能的可靠性。许多开发者在STM32、Arduino或嵌入式ROS系统上实现了基础运动控制后,往往会遇到一…...