ARM:使用汇编完成三个灯流水亮灭
1.汇编源代码
.text
.global _start
_start: @设置GPIOF寄存器的时钟使能LDR R0,=0X50000A28LDR R1,[R0]ORR R1,R1,#(0x1<<5)STR R1,[R0]@设置GPIOE寄存器的时钟使能LDR R0,=0X50000A28LDR R1,[R0] @从r0为起始地址的4字节数据取出放在R1ORR R1,R1,#(0x1<<4) @第4位设置为1STR R1,[R0] @写回@设置PE10管脚为输出模式 GPIOE_MODER[21:20]->01 0x50006000LDR R0,=0x50006000LDR R1,[R0]BIC R1,R1,#(0x3<<20)@[21L20]清0ORR R1,R1,#(0X1<<20) @设置STR R1,[R0] @设置PF10管脚为输出模式LDR R0,=0x50007000LDR R1,[R0]BIC R1,R1,#(0x3<<20)ORR R1,R1,#(0x1<<20)STR R1,[R0]@设置PE8管脚为输出模式LDR R0,=0x50006000LDR R1,[R0]BIC R1,R1,#(0x3<<16) @[17:16]清0ORR R1,R1,#(0X1<<16) @设置1STR R1,[R0] @设置PE10管脚为推挽输出 GPIOE_OTYPER[10]->0 0X50006004LDR R0,=0X50006004LDR R1,[R0]BIC R1,R1,#(0X1<<10)STR R1,[R0]@设置PF10管脚为推挽输出LDR R0,=0X50007004LDR R1,[R0]BIC R1,R1,#(0X1<<10)STR R1,[R0]@设置PE8管脚为推挽输出 GPIOE_OTYPER[10]->0 0X50006004LDR R0,=0X50006004LDR R1,[R0]BIC R1,R1,#(0X1<<8)STR R1,[R0]@设置PE10管脚为低速输出 GPIOE_OSPEEDR[21:20]->00 0X50006008LDR R0,=0x50006008LDR R1,[R0]BIC R1,R1,#(0x3<<20)@[21L20]清0STR R1,[R0]@设置PF10管脚为低速输出LDR R0,=0x50007008LDR R1,[R0]BIC R1,R1,#(0x3<<20)@[21L20]清0STR R1,[R0]@设置PE8管脚为低速输出 GPIOE_OSPEEDR[21:20]->00 0X50006008LDR R0,=0x50006008LDR R1,[R0]BIC R1,R1,#(0x3<<16) @[17:16]清0STR R1,[R0]@设置PE10管脚输出时没有上拉下拉电阻 GPIOE_PUPDR[21:20]->00 0X5000600CLDR R0,=0x5000600cLDR R1,[R0]BIC R1,R1,#(0x3<<20)@[21L20]清0STR R1,[R0]@设置PE8管脚输出时没有上拉下拉电阻 GPIOE_PUPDR[21:20]->00 0X5000600CLDR R0,=0x5000600cLDR R1,[R0]BIC R1,R1,#(0x3<<16)@[17:16]清0STR R1,[R0] @设置PF10管脚输出时没有上拉下拉电阻LDR R0,=0x5000700cLDR R1,[R0]BIC R1,R1,#(0x3<<20)@[21L20]清0STR R1,[R0]@ 6.PE10输出高低电平 GPIOE_ODR[10]->1(高电平) 0(低电平) 0X50006014@LED1亮灭交替
loop:@led1亮LDR R0,=0X50006014LDR R1,[R0]ORR R1,R1,#(0x1<<10)STR R1,[R0]BL delay@led2灭LDR R0,=0X50006014LDR R1,[R0]BIC R1,R1,#(0x1<<10)STR R1,[R0]BL delay@led2亮LDR R0,=0X50007014LDR R1,[R0]ORR R1,R1,#(0x1<<10)STR R1,[R0]BL delay@led2灭LDR R0,=0X50007014LDR R1,[R0]BIC R1,R1,#(0x1<<10)STR R1,[R0]BL delay@led3亮LDR R0,=0X50006014LDR R1,[R0]ORR R1,R1,#(0x1<<8)STR R1,[R0]BL delay@led3灭LDR R0,=0X50006014LDR R1,[R0]BIC R1,R1,#(0x1<<8)STR R1,[R0]BL delayb loop@封装延时函数delay:LDR R4,=0X10000000
mm:cmp r4,#0subne r4,r4,#1bne mmmov pc,lr @程序返回 .end
2.实验现象
相关文章:
ARM:使用汇编完成三个灯流水亮灭
1.汇编源代码 .text .global _start _start: 设置GPIOF寄存器的时钟使能LDR R0,0X50000A28LDR R1,[R0]ORR R1,R1,#(0x1<<5)STR R1,[R0]设置GPIOE寄存器的时钟使能LDR R0,0X50000A28LDR R1,[R0] 从r0为起始地址的4字节数据取出放在R1ORR R1,R1,#(0x1<<4) 第4位设…...
嵌入式养成计划-33--数据库-sqlite3
七十一、 数据库 71.1 数据库基本概念 数据(Data) 能够输入计算机并能被计算机程序识别和处理的信息集合数据库 (Database)数据库是在数据库管理系统管理和控制之下,存放在存储介质上的数据集合 常用的数据库 大型数…...

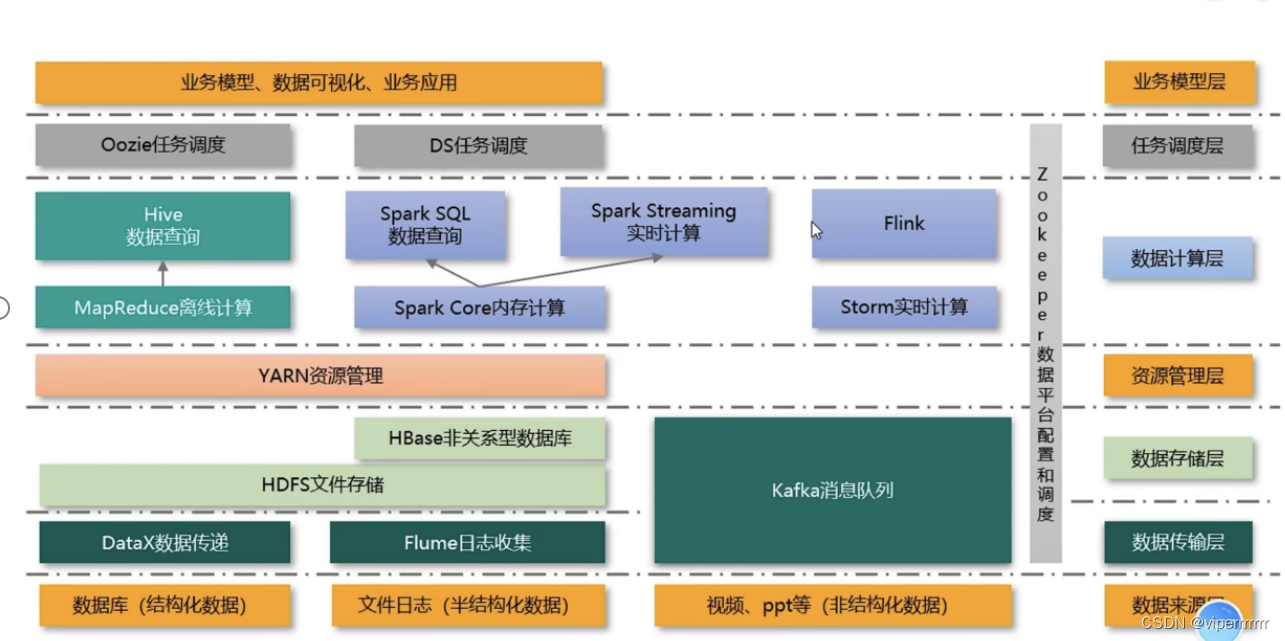
什么是大数据运维?大数据运维的职责
大数据运维是指管理、监控和维护大规模数据存储和处理平台的过程。它包含了对数据存储、处理、传输等方面的管理和维护,同时负责确保数据的安全性、可靠性和高效性。 大数据运维的职责包括以下几个方面: 确保大数据平台的高可用性和稳定性,…...

解决方案:AI赋能工业生产3.0,从工业“制造”到“智造”
视频监控技术是一种既成熟又广泛应用于工业制造领域的先进技术。它可以通过安装各种摄像头和传感器来监测整个生产流程,包括原材料的采购、加工、装配和物流等环节,从而实现对生产过程的实时监控和管理,以及对异常事件的及时预警和响应。 在…...

Android KeyStore 秘钥导入
源码参考: https://android.googlesource.com/platform/cts//master/tests/tests/keystore/src/android/keystore/cts/ImportWrappedKeyTest.java 辅助源码参考: https://android.googlesource.com/platform/frameworks/base//master/core/java/android…...

TDengine+OpenVINO+AIxBoard,助力时序数据分类
时间序列数据分析在工业,能源,医疗,交通,金融,零售等多个领域都有广泛应用。其中时间序列数据分类是分析时序数据的常见任务之一。本文将通过一个具体的案例,介绍 Intel 团队如何使用 TDengine 作为基础软件…...

设计模式——16. 迭代器模式
1. 说明 迭代器模式(Iterator Pattern)是一种行为型设计模式,它用于提供一种访问聚合对象(如列表、数组、集合等)元素的统一接口,而不需要了解底层数据结构的具体实现。迭代器模式将遍历聚合对象的操作封装在一个独立的迭代器对象中,这样可以隔离遍历算法和数据结构,使…...

flink redis connector需要防止包冲突
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 <dependency><groupId>org.apache.bahir</groupId><artifactId...
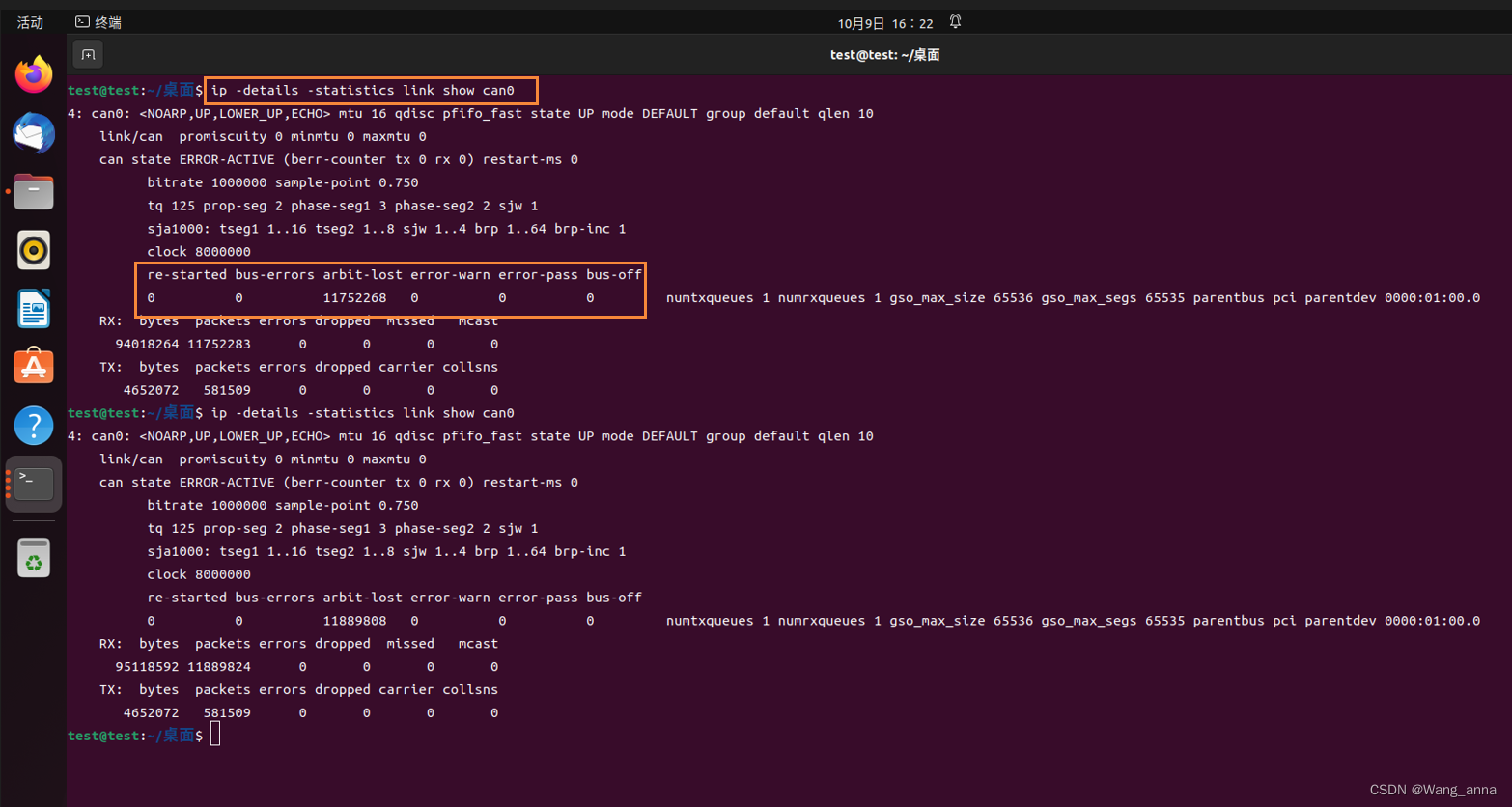
socket can查看详细信息 命令 ip -details -statistics link show can0
ip -details -statistics link show can0 ip -details link show can0 ip -statistics link show can0 也可以像第一行那样结合使用...

打造虚拟企业展厅,开启商务活动新时代
引言: 虚拟企业展厅是一种基于数字技术的全新商务模式,正在改变传统商务活动的方式,它比传统的企业展厅更便利,也更能凸显企业优势,展示企业风貌。 一.虚拟企业展厅的好处 1.打破地域限制 传统的商务活动通常需要参…...

03黑马店评-添加商户缓存和商户类型的缓存到Redis
商户查询缓存 什么是缓存 实际开发过程中数据量可以达到几千万,缓存可以作为避震器防止过高的数据访问猛冲系统,避免系统内的操作线程无法及时处理信息而瘫痪 缓存(Cache)就是数据交换的缓冲区(储存临时数据的地方),我们俗称的"缓存"实际就是缓冲区内的数据(一般从…...
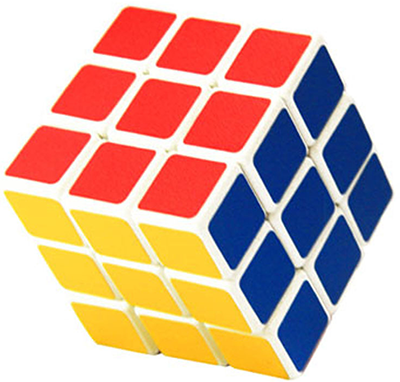
LabVIEW玩转魔方
LabVIEW玩转魔方 使用LabVIEW创建一个3D魔方,并找出解谜题的秘密,给朋友留下深刻深刻的印象。游戏中内置的机制使每张脸都能独立转动,从而混合颜色。要解决难题,每个面必须是相同的纯色 魔方的奥秘在于它的简单性和不可解性。这是…...
大数据学习(1)-Hadoop
&&大数据学习&& 🔥系列专栏: 👑哲学语录: 承认自己的无知,乃是开启智慧的大门 💖如果觉得博主的文章还不错的话,请点赞👍收藏⭐️留言📝支持一下博>主哦&#x…...

常用时序模型
常用时序模型 RNN (Recurrent Neural Network): 基本概念: RNN是一种可以处理序列数据的神经网络。它在每一时间步都接收一个新的输入,并将前一个时间步的隐藏状态作为额外的输入。问题: 它的主要问题是在处理长序列时遇到的梯度消失和梯度爆炸。这使得RNN难以捕获长期依赖关…...

阿里云/腾讯云国际站:私服服务器:什么是游戏虚拟服务器及用途讲解?
游戏虚拟服务器是一种新兴的技术,它可以为玩家提供更好的游戏体验。私服服务器它可以将游戏服务器的负载分散到多台服务器上,从而提高游戏的流畅度和稳定性。此外,游戏虚拟服务器还可以提供更多的游戏功能,比如游戏聊天室、游戏排…...
ssti 前置学习
python venv环境 可以把它想象成一个容器,该容器供你用来存放你的Python脚本以及安装各种Python第三方模块,容器里的环境和本机是完全分开的 创建venv环境安装flask #apt install python3.10-venv #cd /opt #python3 -m venv flask1 #cd /opt 选…...
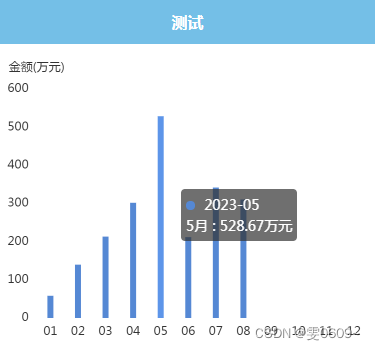
uni-app:服务器端数据绘制echarts图标(renderjs解决手机端无法显示问题)
效果 代码 <template><view click"echarts.onClick" :prop"option" :change:prop"echarts.updateEcharts" id"echarts" class"echarts"></view> </template><script>export default {data()…...

Python集合魔法:解锁数据去重技巧
更多资料获取 📚 个人网站:涛哥聊Python 在Python编程的魔法世界中,有一种数据类型几乎被忽视,但却拥有强大的超能力,那就是集合(Set)。 集合是一种无序、唯一的数据类型,它以其独…...

flutter开发实战-inappwebview实现flutter与Javascript的交互JSBridge
flutter开发实战-inappwebview实现flutter与Javascript的交互JSBridge 在使用webview中,需要实现flutter与Javascript交互,在使用webview_flutter插件的时候,整理了一下webview与Javascript的交互JSBridge,具体可以查看 https:/…...
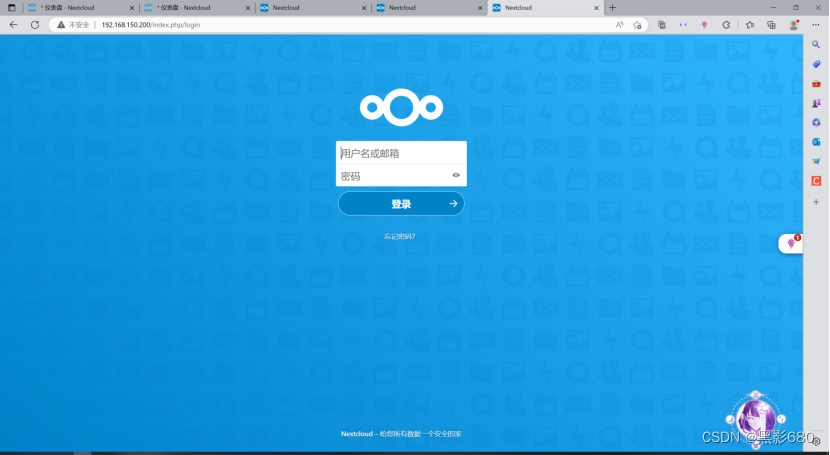
私有云盘:lamp部署nextcloud+高可用集群
目录 一、实验准备: 二、配置mariadb主从复制 三台主机下载mariadb 1)主的操作 2)从的操作 3)测试数据是否同步 三、配置nfs让web服务挂载 1、安装 2、配置nfs服务器 3、配置web服务的httpd 4、测试 四、web 服务器 配…...

Android Studio中文界面解决方案:从语言障碍到开发效率提升
Android Studio中文界面解决方案:从语言障碍到开发效率提升 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack 当你在And…...

Python视频自动化处理:基于FFmpeg与OpenCV的编程式剪辑框架实践
1. 项目概述与核心价值最近在折腾视频剪辑自动化流程,发现了一个挺有意思的开源项目AmitDigga/fabric-video-editor。这名字一看就带着点“缝合怪”的味道,fabric这个词在编程领域通常指代一个框架或结构,而video-editor则直指视频编辑。简单…...

WeChatMsg:5分钟轻松掌握微信聊天记录的终极管理方案
WeChatMsg:5分钟轻松掌握微信聊天记录的终极管理方案 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/WeChat…...

抖音无水印视频下载神器:3分钟快速上手,轻松保存高清无水印视频
抖音无水印视频下载神器:3分钟快速上手,轻松保存高清无水印视频 【免费下载链接】douyin_downloader 抖音短视频无水印下载 win编译版本下载:https://www.lanzous.com/i9za5od 项目地址: https://gitcode.com/gh_mirrors/dou/douyin_downlo…...
)
别再复制官网代码了!Vue + Ant Design 图标与分隔符的本地化实战(附避坑指南)
Vue Ant Design 图标与分隔符的本地化实战指南 在Vue项目中使用Ant Design Vue组件库时,很多开发者习惯直接从官网复制示例代码。然而,这种"拿来主义"常常导致项目运行时出现图标不显示、样式依赖CDN资源等问题。本文将带你从零开始ÿ…...

基于MCP协议与RAG技术构建智能聊天应用:架构解析与实战指南
1. 项目概述:一个基于MCP协议的RAG聊天应用最近在开源社区里,一个名为gogabrielordonez/mcp-ragchat的项目引起了我的注意。乍一看标题,它融合了当下两个非常热门的技术概念:MCP和RAG。对于从事AI应用开发,特别是希望构…...

基于BLE与CircuitPython的远程服务器重启开关设计与实现
1. 项目概述与核心思路手头有几台电脑分散在家里各个角落,有时候它们死机了需要重启,但偏偏其中一台作为监控录像存储的服务器,被我塞进了一个带锁的柜子里。每次都得找钥匙、开门、按按钮,实在麻烦。这个需求催生了我动手做一个无…...

基于LLM与LangChain的智能项目管理Agent:架构设计与工程实践
1. 项目概述:一个面向项目管理的智能体框架 最近在开源社区里,我注意到一个名为 gannonh/agent-pm 的项目开始受到一些关注。乍一看这个名字,你可能会联想到“项目经理”或者“项目管理”,没错,这个项目的核心定位&…...

开源实时监控告警引擎OpenAlerts:从原理到生产部署实战
1. 项目概述:一个开源的实时监控与告警引擎在运维、开发和业务监控的日常工作中,我们常常面临一个核心痛点:如何从海量的日志、指标和事件数据中,快速、准确地识别出异常,并及时通知到正确的人。市面上的商业监控方案功…...

“梦想、汗水、坚持”2026 SNH48 GROUP年度青春盛典5月30日正式启动
“十三而砺,向新而行。”中国大型青春女团SNH48 GROUP运营方上海丝芭文化传媒集团有限公司即日宣布:2026 SNH48 GROUP第十三届年度青春盛典大型系列活动将于5月30日正式启动,本届年度青春盛典颁奖典礼暨汇报演唱会定档8月8日,落地…...