2731. 移动机器人
2731. 移动机器人有一些机器人分布在一条无限长的数轴上,他们初始坐标用一个下标从 0 开始的整数数组 nums 表示。当你给机器人下达命令时,它们以每秒钟一单位的速度开始移动。
给你一个字符串 s ,每个字符按顺序分别表示每个机器人移动的方向。'L' 表示机器人往左或者数轴的负方向移动,'R' 表示机器人往右或者数轴的正方向移动。
当两个机器人相撞时,它们开始沿着原本相反的方向移动。
请你返回指令重复执行 d 秒后,所有机器人之间两两距离之和。由于答案可能很大,请你将答案对 109 + 7 取余后返回。
注意:
- 对于坐标在
i和j的两个机器人,(i,j)和(j,i)视为相同的坐标对。也就是说,机器人视为无差别的。 - 当机器人相撞时,它们 立即改变 它们的前进方向,这个过程不消耗任何时间。
-
当两个机器人在同一时刻占据相同的位置时,就会相撞。
-
例如,如果一个机器人位于位置 0 并往右移动,另一个机器人位于位置 2 并往左移动,下一秒,它们都将占据位置 1,并改变方向。再下一秒钟后,第一个机器人位于位置 0 并往左移动,而另一个机器人位于位置 2 并往右移动。
-
例如,如果一个机器人位于位置 0 并往右移动,另一个机器人位于位置 1 并往左移动,下一秒,第一个机器人位于位置 0 并往左行驶,而另一个机器人位于位置 1 并往右移动。
-
示例 1:
输入:nums = [-2,0,2], s = "RLL", d = 3 输出:8 解释: 1 秒后,机器人的位置为 [-1,-1,1] 。现在下标为 0 的机器人开始往左移动,下标为 1 的机器人开始往右移动。 2 秒后,机器人的位置为 [-2,0,0] 。现在下标为 1 的机器人开始往左移动,下标为 2 的机器人开始往右移动。 3 秒后,机器人的位置为 [-3,-1,1] 。 下标为 0 和 1 的机器人之间距离为 abs(-3 - (-1)) = 2 。 下标为 0 和 2 的机器人之间的距离为 abs(-3 - 1) = 4 。 下标为 1 和 2 的机器人之间的距离为 abs(-1 - 1) = 2 。 所有机器人对之间的总距离为 2 + 4 + 2 = 8 。
示例 2:
输入:nums = [1,0], s = "RL", d = 2 输出:5 解释: 1 秒后,机器人的位置为 [2,-1] 。 2 秒后,机器人的位置为 [3,-2] 。 两个机器人的距离为 abs(-2 - 3) = 5 。
提示:
2 <= nums.length <= 105-2 * 109 <= nums[i] <= 2 * 1090 <= d <= 109nums.length == s.lengths只包含'L'和'R'。nums[i]互不相同。
题解:
当两个机器人相撞时,它们会沿着原本相反的方向移动。由于机器人之间并没有任何区别,相撞可以看做是穿透,原本左边的机器人相撞后交换为右边的机器人,原本右边的机器人相撞后交换为左边的机器人,这样一来,两个机器人仿佛没有相撞过。因此,我们可以无视相撞,独立计算每个机器人 ddd 秒后所处的位置。
总结三点:
- 碰撞是障眼法, 可以看做穿透
- 排序+前缀和计算距离和。
- 求模时求一次和多次没啥区别,可能减少遗漏
概率中的排列组合的思想,考虑一共有多少区间会包括pos[i] - pos[i - 1]这段距离,左边界有i种可能,右边界有(n-i)种可能,两个相乘就是区间的组合数量:i*(n-i)。区间组合数量乘上距离就是这段距离(pos[i] - pos[i - 1])产生的总距离,枚举所有i就是所有距离段的和。
code:
class Solution {static final int MOD = 1000000007;public int sumDistance(int[] nums, String s, int d) {int n = nums.length;long[] pos = new long[n];for (int i = 0; i < n; i++) {if (s.charAt(i) == 'L') {pos[i] = (long) nums[i] - d;} else {pos[i] = (long) nums[i] + d;}}Arrays.sort(pos);long res = 0;for (int i = 1; i < n; i++) {res += 1L * (pos[i] - pos[i - 1]) * i % MOD * (n - i) % MOD;res %= MOD;}return (int) res;}
}相关文章:

2731. 移动机器人
2731. 移动机器人有一些机器人分布在一条无限长的数轴上,他们初始坐标用一个下标从 0 开始的整数数组 nums 表示。当你给机器人下达命令时,它们以每秒钟一单位的速度开始移动。 给你一个字符串 s ,每个字符按顺序分别表示每个机器人移动的方…...

小程序实现人脸识别功能
调用api wx.startFacialRecognitionVerify 第一步: // 修改方法expertUpdate() {wx.startFacialRecognitionVerify({name: _this.registerForm.realName, //身份证名称idCardNumber: _this.registerForm.idCard, //身份证号码checkAliveType: 1, //屏幕闪烁(人脸核验的交互…...

【】javax.crypto.IllegalBlockSizeException: Input length not multiple of 8 bytes
问题描述 jdk版本:8 用DES进行加解密,其中转换模式为“DES/CBC/NoPadding”,要加密的明文为 “密码学浅析”,执行加密操作,报如下错误 Exception in thread "main" javax.crypto.IllegalBlockSizeExcepti…...

312.戳气球
将戳气球转换到添加气球,记忆搜索slove(i,j):在开区间(i,j)全部填满气球得到的最多硬币数,两端val[i]、val[j] class Solution { public:vector<vector<int>> ans;vector<int> val;int slove(int left,int right){if(left&…...

get_trade_detail_data函数使用
查阅股票持仓情况 positions get_trade_detail_data(‘8000000213’, ‘stock’, ‘position’) for dt in positions: print(f’股票代码: {dt.m_strInstrumentID}, 市场类型: {dt.m_strExchangeID}, 证券名称: {dt.m_strInstrumentName}, 持仓量: {dt.m_nVolume}, 可用数量:…...
【融合ChatGPT等AI模型】Python-GEE遥感云大数据分析、管理与可视化及多领域案例实践应用
目录 第一章 理论基础 第二章 开发环境搭建 第三章 遥感大数据处理基础与ChatGPT等AI模型交互 第四章 典型案例操作实践 第五章 输入输出及数据资产高效管理 第六章 云端数据论文出版级可视化 更多应用 随着航空、航天、近地空间等多个遥感平台的不断发展,近…...
LeetCode862 和至少为k的最短子数组
题目: 解析: 1、先构造前缀和数组 2、单调队列存放滑动窗口,目的求Sj-Si >k的情况下,窗口最小。 代码: class Solution {public int shortestSubarray(int[] nums, int k) {int n nums.length;long[] sums new …...

网卡bonding模式 - bond模式配置介绍
网卡bonding简介 网卡绑定就是把多张物理网卡通过软件虚拟成一个虚拟的网卡,配置完毕后,所有的物理网卡的ip和mac将会变成相同的。多网卡同时工作可以提高网络速度,还可以实现网卡的负载均衡、冗余。 bonding模式 1 round-robin(mode0) 轮转…...

做了个 chrome 插件实现 B 站视频截图功能,直接从当前视频帧无损复制
起因是看 B 站视频想截个图很麻烦,右下角暂停按钮无法去除,于是写了一行代码把暂停按钮隐藏。 后经提醒,发现可以通过 canvas 获取视频帧来截取图片,于是写了如下代码完美获取视频帧。 var v document.querySelector(".bpx…...

Docker linux 安装
sudo yum update sudo yum clean all sudo yum makecache#安装依赖 sudo yum install -y yum-utils device-mapper-persistent-data lvm2 #添加官方存储库 sudo yum-config-manager --add-repo https://download.docker.com/linux/centos/docker-ce.repo#安装-跳过一些异常依赖…...
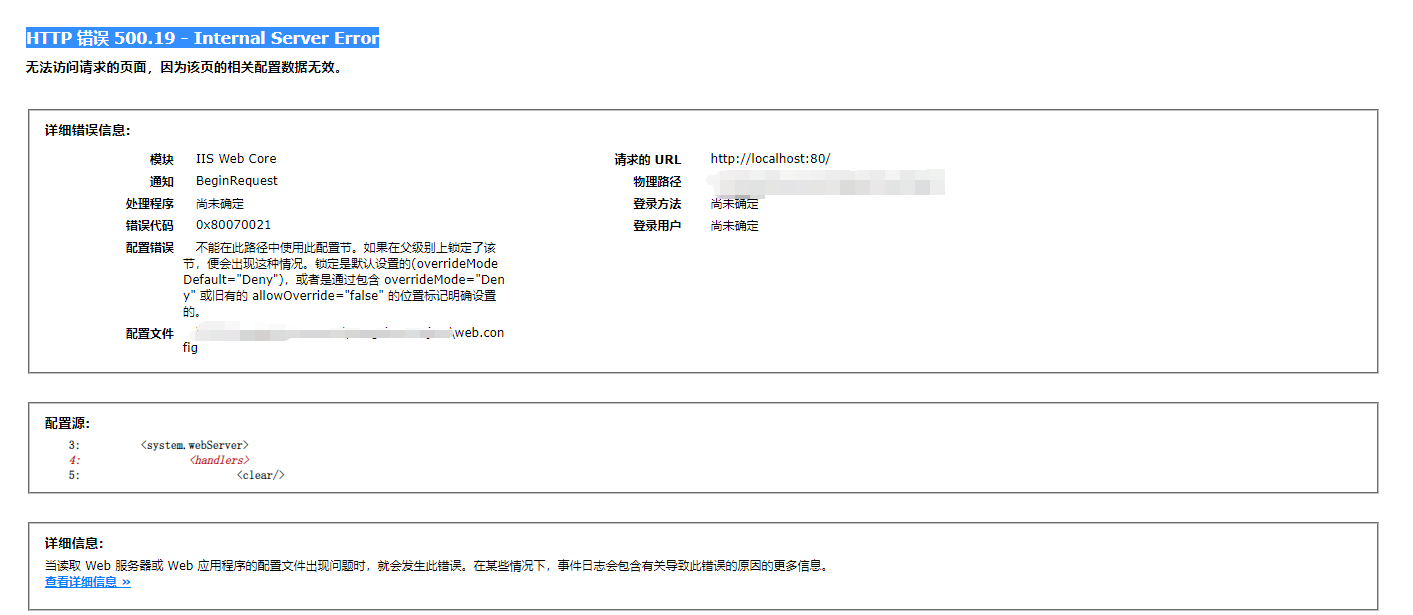
windows部署django服务器
windows部署django服务器 1、安装IIS1.1 控制面板-----程序----程序和功能----启用或关闭windows功能1.2安装IIS服务器,完成后,重新进入,把CGI安装进系统 2、安装python与虚拟环境2.1 安装python2.2 安装virtualenv虚拟环境2.3 创建一个虚拟环…...

ChatGPT prompt汇总-个人使用-持续更新....
用途 学术写作更新记录 学术写作 中译英(GPT-4) I am a researcher studying deep learning and now trying to revise my manuscript which will be submitted to the Journal of Nature . I want you to act as a scientific English-Chinese translator, I will provide yo…...
Vue实现简单的接口封装
1. 在src中创建一个api文件夹 2. 按功能、模块等新建对应的js文件 3. 在内部写对应的封装接口,并导出 import axios from "axios";/*** 接口名称:* 接收参数:* 返回参数:* */export const miens ()>{return new P…...

软件测试工具有什么作用?有哪些好用的测试工具推荐?
软件测试工具是现代软件测试中不可或缺的重要组成部分,指的是一系列在软件开发过程中使用的工具,用于帮助测试人员进行测试活动,提高测试效率,减少测试成本。选择并使用合适的软件测试工具,可提高软件质量和效率。 一…...
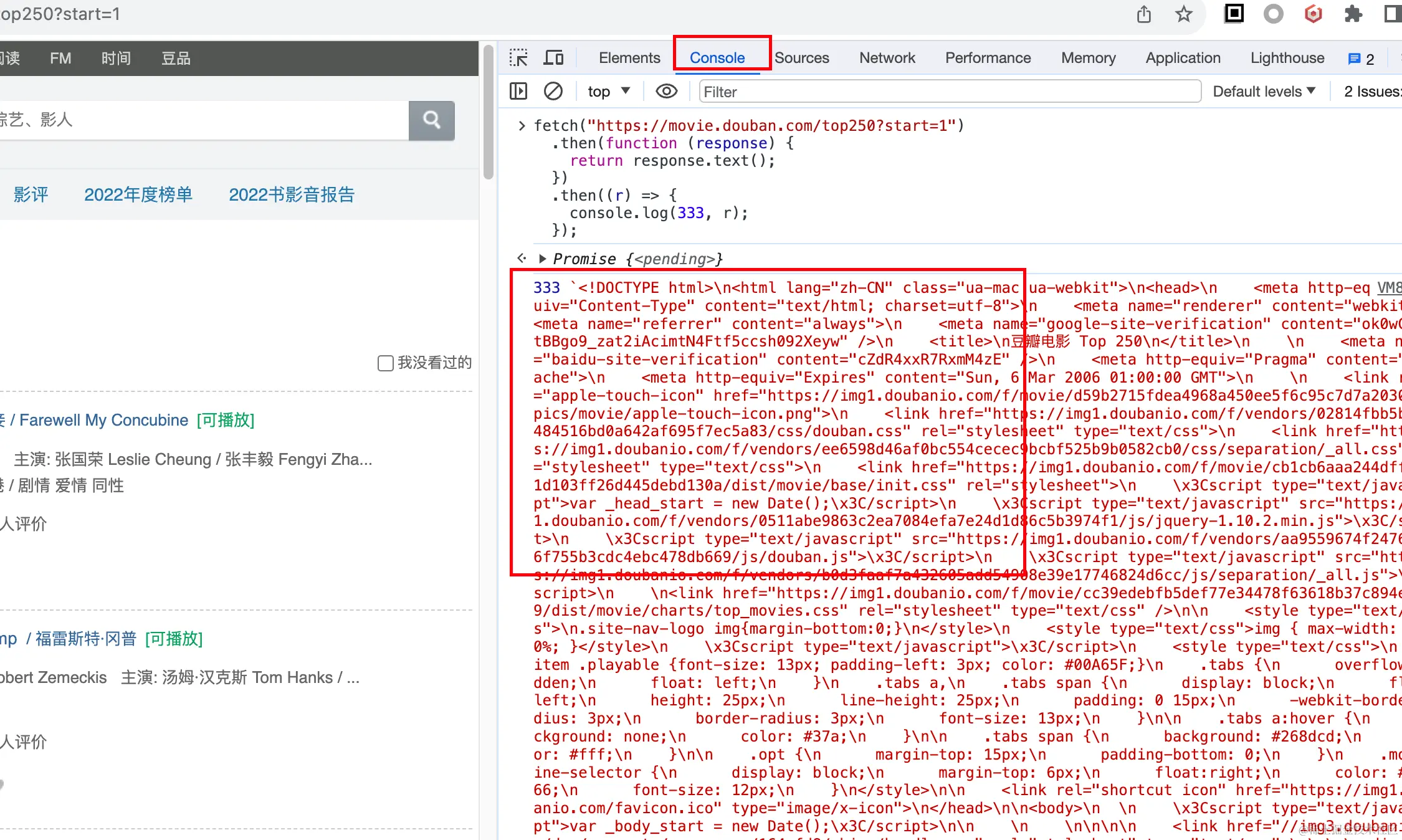
写爬虫?前端er何必用python
前言 说起网络爬虫,很多人第一时间想到python,但爬虫并非只能用python实现,虽然网上大部分爬虫文章都在说python爬虫,但对于前端程序员来说,我觉得js才是最屌的(对于简单爬取任务来说,复杂的我暂时没碰到~),下面说说我的经验(是的,仅限本人经验),希望能给各位前…...

交通物流模型 | 基于交通图卷积长短时记忆网络的网络级交通流预测
交通物流模型 | 基于交通图卷积长短时记忆网络的网络级交通流预测 由于道路网络时变的交通模式和复杂的空间依赖性,交通流预测是一个具有挑战性的时空预测问题。为了克服该挑战,作者将交通网络看为一张图,并提出一个新的深度学习预测模型,交通图卷积长短时记忆网络(TGC-L…...

web 基础和http 协议
一、域名 域名的概念 IP地址不易记忆,域名方便记住,以便于用户进行搜索访问 早期使用Hosts文件解析域名地址 缺点: ① 主机名称重复 ② 主机维护困难 DNS(Domain Name System)域名系统 ① 分布式 将一个大的数…...

Java常量与变量
Java常量与变量 在程序执行过程中,其值不能被改变的量称为常量,其值能被改变的量称为变量。 Java关键字 Java关键字 int public (公有的,可跨包) new finally throw (抛出一个异常对象) continuefloatlongshort extends (继承,用于类继承类) returnbrea…...
神经网络中卷积和池化的区别
1、什么叫卷积? 卷积层是用一个固定大小的矩形区去席卷原始数据,将原始数据分成一个个和卷积核大小相同的小块,然后将这些小块和卷积核相乘输出一个卷积值(注意这里是一个单独的值,不再是矩阵了)。 卷积的…...

RK3568平台开发系列讲解(驱动篇)RK3568 PWM详解
🚀返回专栏总目录 文章目录 一、什么是PWM二、RK3568 PWM2.1、PWM 通道与引脚2.2、PWM 简介2.3、PWM 设备节点沉淀、分享、成长,让自己和他人都能有所收获!😄 📢 PWM 是很常用到功能,我们可以通过 PWM 来控制电机速度,也可以使用 PWM 来控制 LCD 的背光亮度。 一、什…...

ARM PMU性能监控单元原理与实践指南
1. ARM PMU性能监控单元概述性能监控单元(PMU)是现代ARM处理器中用于硬件级性能分析的核心组件。它通过一组可编程的硬件计数器,实现对处理器内部各种关键事件的精确测量。这些事件涵盖了从指令执行、缓存访问到内存子系统行为等处理器活动的…...

如何从零构建智能FOC轮腿机器人:完整开源硬件系统终极指南
如何从零构建智能FOC轮腿机器人:完整开源硬件系统终极指南 【免费下载链接】foc-wheel-legged-robot Open source materials for a novel structured legged robot, including mechanical design, electronic design, algorithm simulation, and software developme…...

人类防伪指南:为什么你越写错字,HR越信你是真人?
前言各位码农、算法侠、CtrlC/V十级学者请注意:你有没有过这样的经历?辛辛苦苦肝了一晚上文档,逻辑严密、语法丝滑、连Markdown都对齐得像军训方阵,结果老板幽幽来一句:“这真是你自己写的?”那一刻&#x…...

基于MAX78000的医疗紧急呼叫系统:边缘AI与低功耗设计实战
1. 项目概述与核心价值大家好,我是Victor Hugo,一名电子工程师。今天我想和大家分享一个我最近完成并参与设计竞赛的项目:一个基于MAX78000 FTHR开发板的医疗紧急呼叫辅助系统。这个项目的核心,不是从零开始造一个新轮子ÿ…...

独立开发者利用taotoken模型广场为不同任务选择性价比最优模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者利用taotoken模型广场为不同任务选择性价比最优模型 对于独立开发者而言,在有限的预算内高效完成多样化的开…...

终极解决方案:Windows Cleaner免费开源工具,3步彻底解决C盘爆红问题
终极解决方案:Windows Cleaner免费开源工具,3步彻底解决C盘爆红问题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是否也经历过这样的…...

三步破解百度网盘限速:免费获取真实下载链接的终极指南
三步破解百度网盘限速:免费获取真实下载链接的终极指南 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 还在为百度网盘几十KB的龟速下载而苦恼吗?想要彻…...

密码学入门:区块链中的密码学原理
密码学入门:区块链中的密码学原理 大家好,我是欧阳瑞(Rich Own)。今天想和大家聊聊密码学这个重要话题。作为一个Web3探索者,密码学是区块链的基础。今天就来分享一下区块链中常用的密码学原理。 为什么密码学很重要&a…...

清华大学学位论文LaTeX模板:30分钟快速排版终极指南
清华大学学位论文LaTeX模板:30分钟快速排版终极指南 【免费下载链接】thuthesis LaTeX Thesis Template for Tsinghua University 项目地址: https://gitcode.com/gh_mirrors/th/thuthesis 还在为论文格式烦恼吗?清华大学官方LaTeX模板thuthesis让…...

框架组件识别:从版本号到利用链的渗透实战指南
1. 这不是“扫个版本号”那么简单:框架组件识别在真实渗透中的战略定位 很多人看到“框架组件识别”,第一反应是跑个whatweb、wappalyzer,截图发报告里写一句“识别到Spring Boot 2.6.3”,就算交差了。我干这行十多年,…...