三.镜头知识之FOV
三.镜头知识之视场角
最近试了很多sensor, 每次在选镜头时都对其提到的FOV参数一头雾水。不同的sensor要配不同的镜头,而不同的镜头由于焦距的不同,FOV也不一样。这其中有什么联系呢?FOV又分为HFOV(水平), VFOV( 垂直), DFOV(对角)。大部分镜头规格书上只提供一个FOV数值,具体如何对应上呢?
要搞清上面的这些问题,首先需要把基本概念搞清楚。
文章目录
- 三.镜头知识之视场角
- 3.1 视场的计算方法
- 3.2 实际产品视场角
- 3.3 **视场角**
- 3.4 M8镜头+SC4236 sensor 的视场角度计算DEMO
- 3.4.1 sensor sc2336
- 3.5 线激光模组镜头FOV 与 根据焦距,cmos sensor(SC035) 靶面计算不一致
- 3.6 FOV总结
- 3.6 FOV总结
3.0 FOV(Field Of View)视场角定义:

是指镜头能拍摄到的最大视场范围。
视场角可分为对角线视场角(FOV-D)、水平视场角(FOV-H)、以及垂直视场角(FOV-V)。对角线视场角最大,水平视场角次之,垂直视场角最小。通常我们所讲的视场角一般是指数码摄像模组的对角线视场角。
FOV-H=2tan(H/2D)
FOV-V=2tan(V/2D)
FOV-D=2tan[sqrt(H2+V2)/2D]
3.1 视场的计算方法


3.2 实际产品视场角

实际产品视场角 由镜头/sensor共同决定

让我们假设你的手抖动了一下,它们会引起轻微的角度偏移,如果我的图像是这么宽的,近距离的,那么少量的角度偏移不会移动我的像素。但是假设我的视角是,你知道的,很远的,一个度或者几个度,那么,我的手的小角度移动会使像素移动很多。这就是为什么焦距越长,你的图像就越稳定。这就是为什么你要有一个三脚架,这不仅仅是因为它们很重,也是因为你需要让图像保持完美的效果。
视场实际上取决于两件事。我们已经知道了,right?我们知道这取决于焦距(Focus Length),但它也将是一个函数,比如,感光的元件有多大?

所以 d 这里叫视网膜(Retina)的大小,okay?所以视网膜是你眼睛后部感觉到光的东西,把它想象成感光的介质。
d 是这条线的整个大小(如图1),这是 f 焦距(如图2),显然是d/2 / f,这个角是arctan(如图3),这是切线的角度,就是这个角(如图4),这是半个视场。所以基本上,底线是 焦距 f 越长,

视场越小。成像面越大,视场越大。
a.镜头焦距与视角成反比。焦距长,视角小,意味着能远距离摄取较大的景物;焦距短,视角大,意味着能近距离摄取范围较广的景物。
b.相同焦距的镜头在不同规格Sensor上,Sensor size 越大,视角越大,Sensor size越小,视角越小。
3.3 视场角
头中有一个参数是:视场角(DHV)如果使用1/2"芯片尺寸的相机的话,其为:51.9°42.5°32.4°
它为和视野大小不是一个概念,它的大小解决了视野大小,见下面的说明:

在光学仪器中,以光学仪器的镜头为顶点,以被测
目标的物像可通过镜头的最大范围的两条边缘构成的夹角,称为视场角

在下图中,AOB角就是水平视场角,BOC就是垂直视场角。
视场角的大小决定了光学仪器的视野范围,视场角越大,视野就越大,光学倍率就越小。通俗地说,目标物体超过这个角就不会被收在镜头里。
视场角(DHV),其中的H, V上面已经说清楚了。
但是D也是什么呢? 如下图左边的示例,它应该是对角线构成的直径视场角

视场角的其它特性如下:
视场角与焦距的关系:一般情况下,视场角越大,焦距就越短。
标准镜头:视角45度左右,使用范围较广。
远摄镜头:视角40度以内,可在远距离情况下拍摄。
广角镜头:视角60度以上,观察范围较大,近处图像有变形。

HFOV︰ 水平视角
VFOV: 垂直的视野
DFOV: 显示字段的视图
以下是 HFOV、 VFOV 和 DFOV 公式。

3.4 M8镜头+SC4236 sensor 的视场角度计算DEMO

M8镜头焦距 f=2.3mm ,
3.4.1 sensor sc2336

h=2304*2.5 um
w=1536*2.5 um
t a n ( x / 2 ) = ( h / 2 ) / f tan(x/2) = (h/2) / f tan(x/2)=(h/2)/f
h/2 /f = 2304*2.5 um /2 /2.3mm = 2.88/2.3=1.252
x = 2 ∗ a r c t a n ( h / 2 / f ) x= 2*arctan(h/2/f) x=2∗arctan(h/2/f)
x/2= arctan(1.252) x=2*51.38=102。
这就是水平视场角
垂直视场角呢?同等道理
w/2 /f = 1536*2.5 um /2 /2.3mm =0.834
x/2= arctan(0.834) x=2*39.85=80。
DFOV:D=2d ,d=2304/22+1536/22开根号 *2.5=3.45 mm
tan(DFOV/2)=d/f =3.45 /2.3=1.5
DFOV/2=56.3
DFOV=56.3*2 =112.6。
3.5 线激光模组镜头FOV 与 根据焦距,cmos sensor(SC035) 靶面计算不一致
线激光模组镜头FOV 与 根据焦距,cmos sensor 靶面计算不一致。
线激光模组镜头FOV > 根据焦距,cmos sensor 靶面计算不一致。
水平视场角tan(FOV H/2)= H/2/f = 640/2*3.744um /0.92um=1.3
FOV H=530 x2 =106 0

手册FOV H =113.3
3.6 FOV总结
水平视场角tan(FOV H/2)= H/2/f = 640/2*3.744um /0.92um=1.3
FOV H=530 x2 =106 0
[外链图片转存中…(img-cxsdUn4a-1697080986421)]
手册FOV H =113.3
3.6 FOV总结
镜头FOV 以实际场景测试为准,根据f,sensor size 计算为辅助
相关文章:
三.镜头知识之FOV
三.镜头知识之视场角 最近试了很多sensor, 每次在选镜头时都对其提到的FOV参数一头雾水。不同的sensor要配不同的镜头,而不同的镜头由于焦距的不同,FOV也不一样。这其中有什么联系呢?FOV又分为HFOV(水平), VFOV( 垂直)…...
分布式事务入门
文章目录 分布式事务问题本地事务分布式事务演示分布式事务问题 理论基础CAP定理一致性可用性分区容错矛盾 BASE理论 SeataSeata的架构部署TC服务微服务集成seata 动手实践XA模式两阶段提交Seata的XA模型实现XA模式 AT模式Seata的AT模型流程梳理脏写问题实现AT模式 TCC模式流程…...

Ubuntu的中文乱码问题
一、Ubuntu的中文乱码问题 sudo apt-get install language-pack-zh-hans 二、修改/etc/environment(在文件的末尾追加): LANG"zh_CN.UTF-8" LANGUAGE"zh_CN:zh:en_US:en" 三、修改/var/lib/locales/supported.d/loca…...

[GXYCTF2019]Ping Ping Ping - RCE(空格、关键字绕过[3种方式])
[GXYCTF2019]Ping Ping Ping 1 解题流程1.1 小试牛刀1.2 三种解法1.2.1 解法一:变量定义拼接绕过1.2.2 解法二:base64编码绕过1.2.3 解法三:内联执行绕过2 思考总结1 解题流程 1.1 小试牛刀 1、提示?ip,结合题目名称,我们直接输入?ip=127.0.0.1 PING 127.0.0.1 (127.…...

ceph 分布式存储与部署
目录 一、存储基础: 1.单机存储设备: 2. 单机存储的问题: 3. 商业存储解决方案: 4. 分布式存储: 5. 分布式存储的类型: 二、Ceph 简介: 三、Ceph 优势: 四、Ceph 架构:…...

Go 结构体深度探索:从基础到应用
1. 结构体概述 在计算机编程中,数据结构是组织、管理和存储数据的一种方式,它允许高效地执行各种操作。Go语言中的结构体(Struct)是这些数据结构中的一员,它为数据的组织提供了一种具体的方式。 结构体可以被视为是多…...

分布式系统开发技术中的CAP定理原理
分布式系统开发技术中的CAP定理原理 在分布式系统开发中,CAP定理(一致性、可用性和分区容忍性)是指导我们设计、开发和维护系统的核心原理。该定理阐述了分布式系统中一致性、可用性和扩展性之间无法同时满足的矛盾关系,为我们提…...

Mysql 报错 You can‘t specify target table ‘表名‘ for update in FROM clause
翻译为:不能先select出同一表中的某些值,再update这个表(在同一语句中) 多半是update在where条件后又Select了一次,所以报错 SQL: UPDATE a SET a.name 1 WHERE a.id in (SELECT a.id FROM a WHERE ISNULL(a.id)) …...

【DevOps】DevOps—基本概念
文章目录 1. DevOps2. CI/CD 1. DevOps 维基百科定义: DevOps是一组过程、方法与系统的统称,用于促进 开发、技术运营 和 质量保障(QA) 部门之间的沟通、协作与整合。我理解DevOps是一种软件管理思维模式。 为什么会有DevOps呢&…...
发行版兴趣小组季度动态:Anolis OS 支持大热 AI 软件栈,引入社区合作安全修复流程
发行版兴趣小组(Special Interest Group) :旨在为龙蜥社区构建、发布和维护一个稳定的操作系统发行版。 秋天的季节,发行版兴趣小组在 AI、安全、国产 OS 领域同样也是硕果累累。一起来看一下第三季度发行版兴趣小组的成果总结有…...
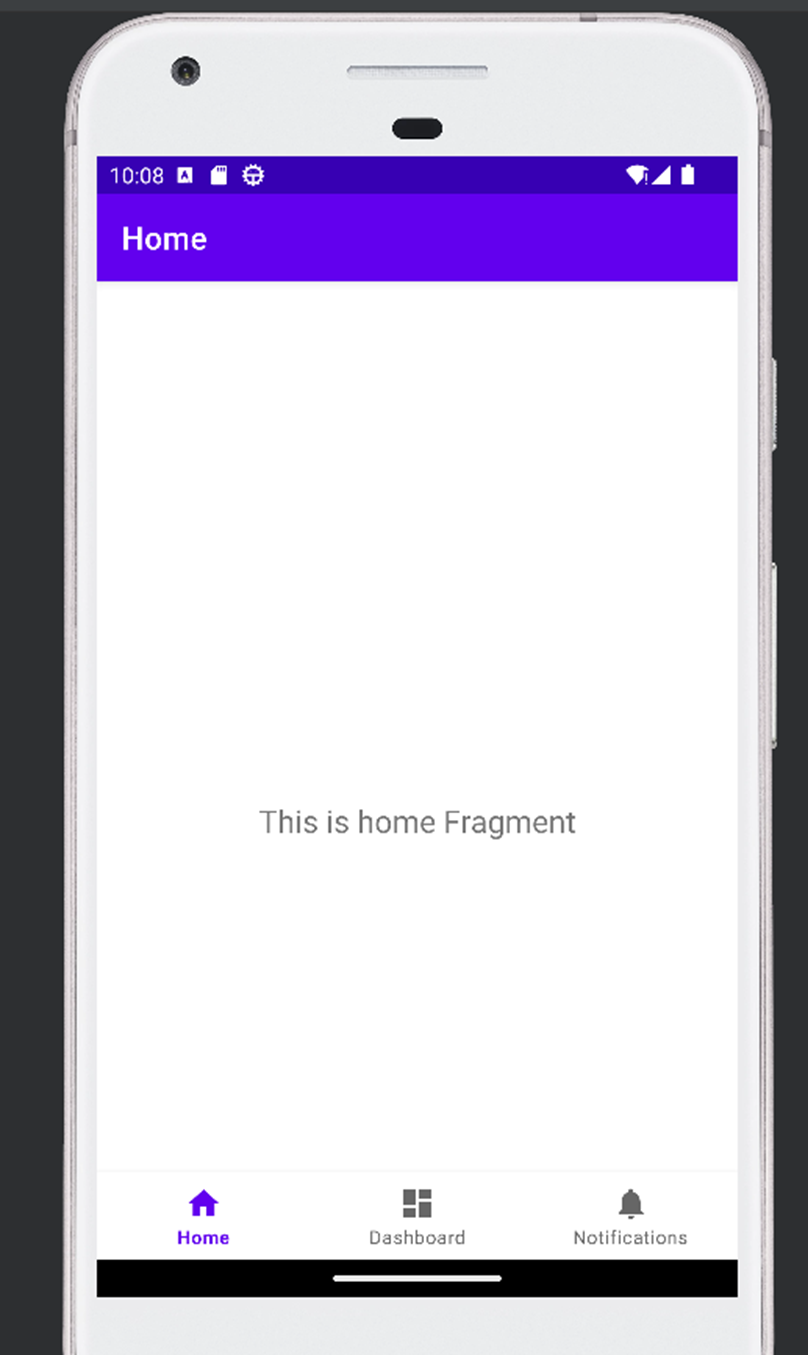
android app开发环境搭建
Android是流行的移动设备原生应用开发平台,其支持Java语言以及Kotlin语言的开发环境,本文主要描述官方提供的Android studio集成开发环境搭建。 https://developer.android.google.cn/ 如上所示,从官方上下载最新版本的Android studio集成开…...

oracle入门笔记一
关系型数据库(Oracle) 一、市面上流行的关系型数据库 大型数据库:oracle(甲骨文)、DB2(IBM)、sysbase(sysbase) 百万以上数据 中型数据库:mysql…...
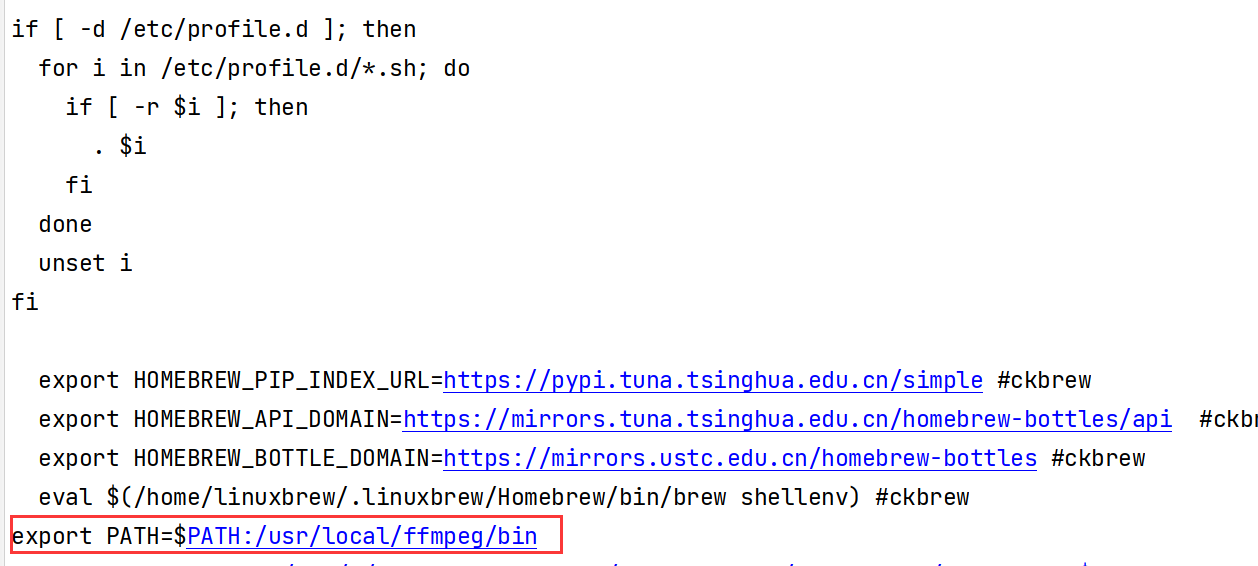
linux下安装ffmpeg的详细教程、ffmpeg is not installed
1、下载解压 wget http://www.ffmpeg.org/releases/ffmpeg-6.0.tar.gz tar -zxvf ffmpeg-6.0.tar.gz 2、 进入解压后目录,输入如下命令/usr/local/ffmpeg为自己指定的安装目录 cd ffmpeg-6.0 ./configure --prefix/usr/local/ffmpeg make sudo make install 3、配置变量 v…...
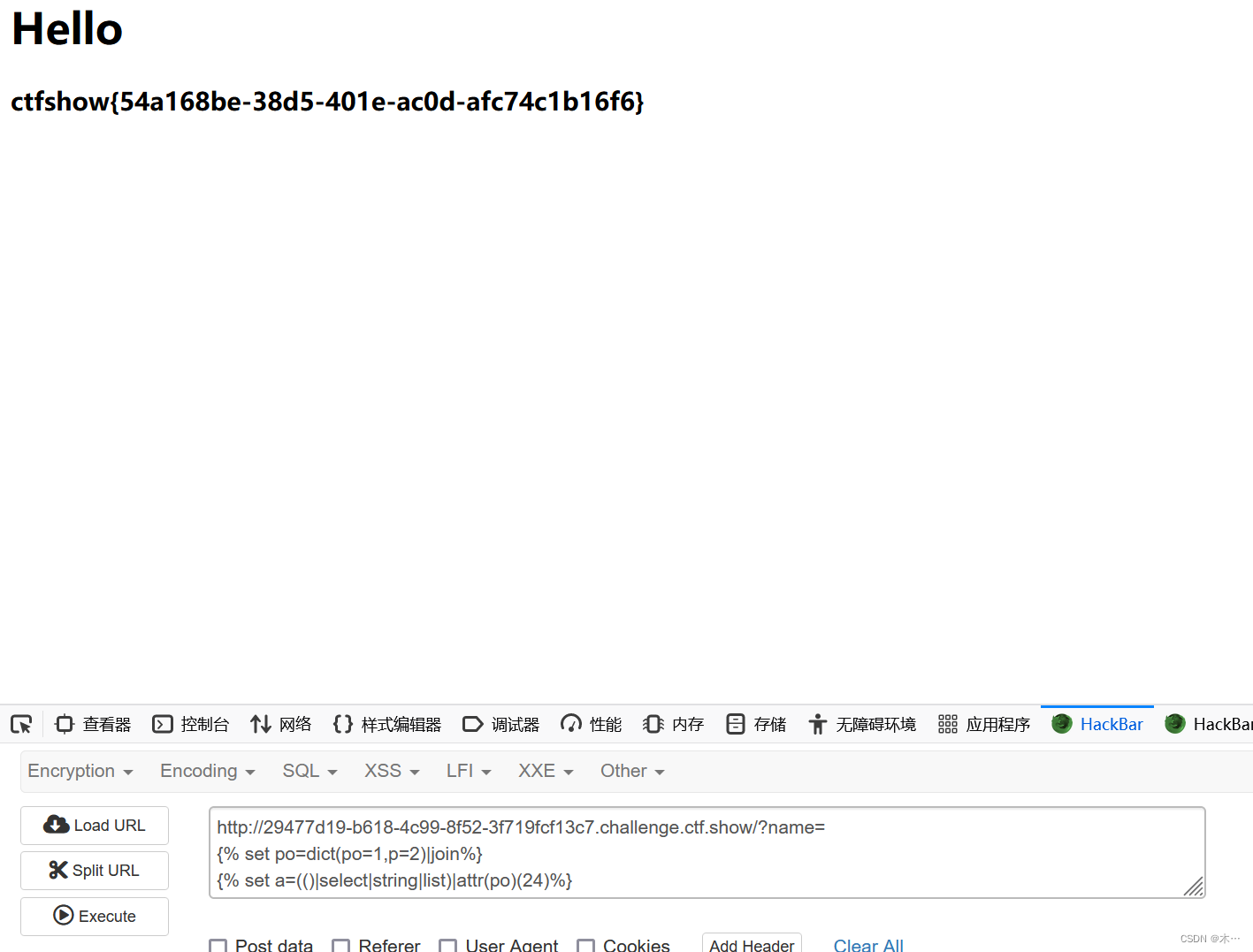
ctfshow-ssti
web361 名字就是考点,所以注入点就是name 先测试一下存不存在ssti漏洞 利用os模块,脚本 查看一下子类的集合 ?name{{.__class__.__base__.__subclasses__()}} 看看有没有os模块,查找os 利用这个类,用脚本跑他的位置 import …...

【ES6 03】变量解构赋值
变量解构赋值 数组解构赋值1 基操2 默认值 对象的解构赋值默认值注意 字符串的解构赋值数值与布尔值的解构赋值函数参数的解构赋值圆括号不得使用 作用 数组解构赋值 1 基操 ES6允许按照一定的模式从数组和对象中提取值从而对变量进行赋值,也即解构(De…...
RustDay03——记录刷完Rust100题
刷了两三天Rust,终于把Rust100题刷完了,小小记录一下 明天白天的时候重开账户开题写答案...

微软10月补丁 | 修复103个漏洞,包括2个零日漏洞,13个严重漏洞
近日,微软发布了2023年10月的补丁更新,解决了其软件中的103个漏洞。 在这103个漏洞中,有13个的评级为严重漏洞,90个被评为重要漏洞。自9月12日以来,谷歌已经解决了基于chrome的Edge浏览器的18个安全漏洞。 这两个零日…...

ubuntu编写makefile编译c++程序
常见的编译工具 gcc/gvisual cclang 编译一个简单的程序 main.cpp #include <iostream>int main() {std::cout << "hello world" << std::endl;return 0; }gcc 编译 源文件(.cpp)编译生成目标文件(.o…...

详解COCO数据格式的json文件内容
coco标注格式的json文件详解 # coco_json结构示意 {info:info,licenses:[licenses],images:[image],annotations:[annotation] } 1. **images**:这个部分包含了所有图像的信息。每个图像都表示为一个字典,包含以下字段: - id:…...
2023.10.12
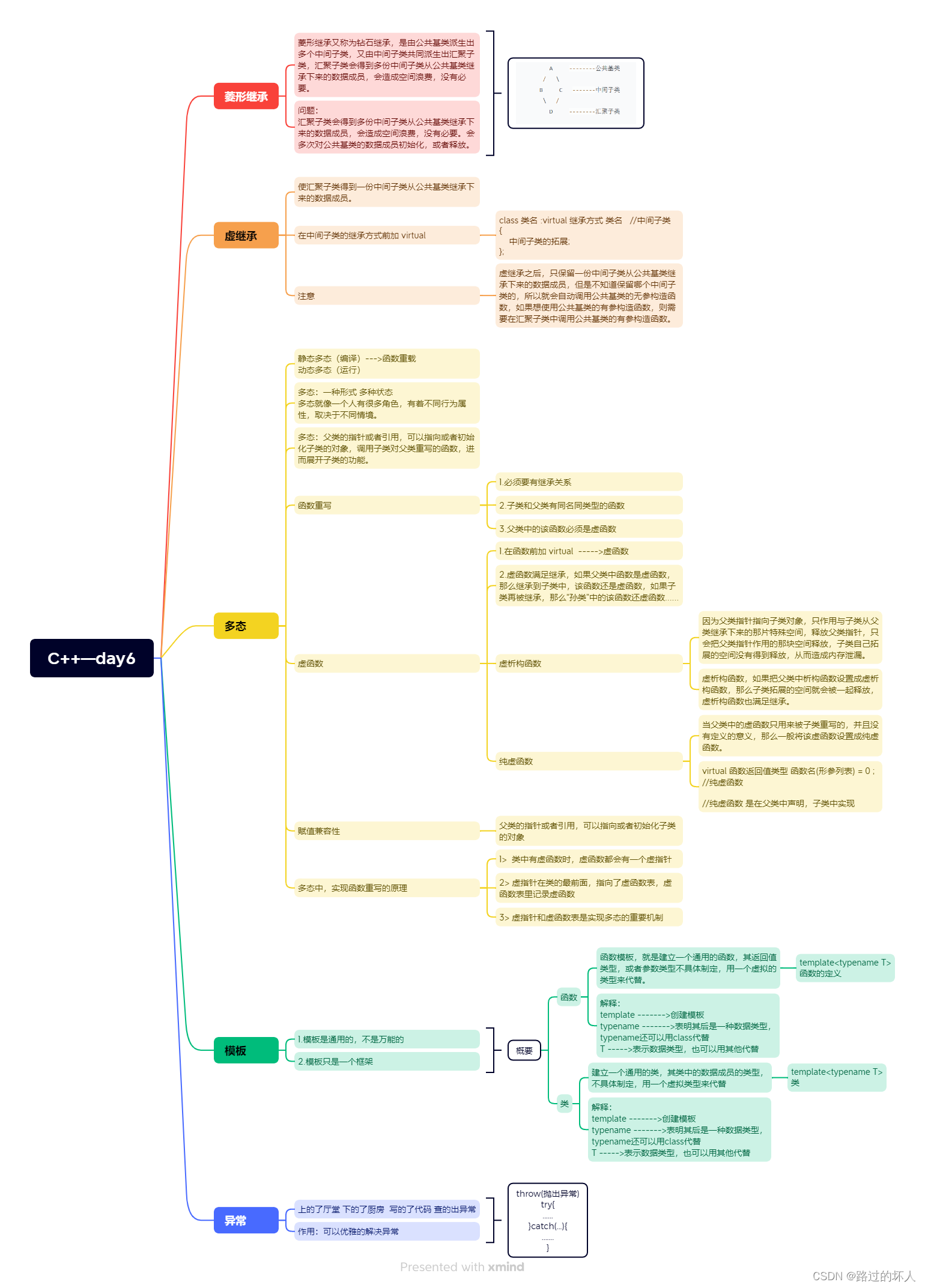
#include <iostream>using namespace std; //定义动物类 class Animal { private:string name; public:Animal(){}Animal(string name):name(name){}~Animal(){}//定义虚函数virtual void perform()0;//表演的节目void show(){cout << "Please enjoy the spec…...

26-cv-2777、26-cv-2964、26-cv-3022、26-cv-3949、26-cv-4062、26-cv-5488 Winnie Rosaline Kan 版权画维权!
案号:26-cv-2777、26-cv-2964、26-cv-3022、26-cv-3949、26-cv-4062、26-cv-5488原告品牌:Winnie Rosaline Kan 版权画品牌方:Casetagram Limited起诉地:美国伊利诺伊州代理律所:Keith起诉时间:2026年03月1…...
)
别再只盯着PWM了!手把手教你为你的Arduino项目选择合适的DCDC调制方式(PFM/PWM/Burst Mode全解析)
别再只盯着PWM了!手把手教你为你的Arduino项目选择合适的DCDC调制方式(PFM/PWM/Burst Mode全解析) 当你为Arduino项目挑选电源模块时,是否曾被数据手册上PWM、PFM、Burst Mode这些术语搞得一头雾水?我曾在一个低功耗气…...

基于LoRA与SFT技术构建中文大语言模型:从词表扩展到指令微调实战
1. 项目概述:为什么我们需要中文专属的大语言模型底座? 如果你在过去一年里尝试过用开源的大语言模型(LLM)来处理中文任务,大概率会遇到过这样的尴尬:模型对英文指令理解得很好,但一换成中文&am…...

aitextgen与GPT-2-simple对比:为什么aitextgen是更好的选择
aitextgen与GPT-2-simple对比:为什么aitextgen是更好的选择 【免费下载链接】aitextgen A robust Python tool for text-based AI training and generation using GPT-2. 项目地址: https://gitcode.com/gh_mirrors/ai/aitextgen aitextgen是一个强大的Pytho…...
)
考古现场数据智能治理新范式(NotebookLM+地层学语义建模深度解析)
更多请点击: https://intelliparadigm.com 第一章:考古现场数据智能治理新范式(NotebookLM地层学语义建模深度解析) 在田野考古数字化进程中,传统地层记录存在碎片化、非结构化与语义断层三大瓶颈。NotebookLM 作为基…...

深入PEX8796:从Serdes到Virtual Switch,图解PCIe交换芯片的三种工作模式
深入解析PEX8796:PCIe交换芯片的架构设计与模式创新 在高速数据传输领域,PCIe交换芯片如同交通枢纽般连接着计算系统的各个组件。作为PLX公司(现已被博通收购)的经典之作,PEX8796凭借其灵活的架构设计和多样化的操作模…...

Lacinia错误处理最佳实践:构建健壮GraphQL API的10个技巧
Lacinia错误处理最佳实践:构建健壮GraphQL API的10个技巧 【免费下载链接】lacinia GraphQL implementation in pure Clojure 项目地址: https://gitcode.com/gh_mirrors/la/lacinia Lacinia作为纯Clojure实现的GraphQL库,为开发者提供了构建高效…...

思源宋体CN终极指南:7种字重免费商用中文字体快速上手完整教程
思源宋体CN终极指南:7种字重免费商用中文字体快速上手完整教程 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 还在为商业项目中文字体版权问题而烦恼吗?思源宋…...

青岛X射线探伤机服务好的供应商
在工业检测领域,X射线探伤机并非一次性采购的设备——它需要持续的技术支持、稳定的运行保障,以及服务商在关键时刻的响应能力。选择一家服务好的供应商,往往比选择一台设备本身更需要慎重。在青岛,有一家名为华誉机电设备有限公司…...

企业微信社群运营太耗人力?API自动化方案实战分享
通过 QiWe API RPA 自动化能力,实现企业微信社群从拉群、维护到触达的全流程自动化运营。社群运营在私域体系中很重要,但也是最“吃人力”的环节之一:拉群、邀请客户全靠人工群公告、活动通知重复发送群成员管理耗时且容易出错多个社群需要反…...