robot remote server用这个server去远程获取ip
server端配置:
1、安装python环境
2、下载robot remote server
下载地址:https://pypi.python.org/pypi/robotremoteserver/(不要用pip下载,把robotremoteserver.py文件下载下来)
3、首先创建一个目录E:\rfremote\ ,目录名你可以随便取。然后,将robotremoteserver.py拷贝到该目录下。打开robotremoteserver.py把host修改成本机ip

4、接着在该目录下创建IpLibrary.py文件。
import requests
import sys
import socket
from robotremoteserver import RobotRemoteServerclass IpLibrary:def getip(self):response = requests.get('https://api64.ipify.org?format=json').json()print(response)return response["ip"]def gethostip(self):hostname = socket.gethostname()ip = socket.gethostbyname(hostname)print(ip)return ipif __name__ == '__main__':RobotRemoteServer(IpLibrary(), *sys.argv[1:])
在rfremote目录下用python命令执行IpLibrary.py文件(这里的IP就是上一步配置的本机IP),如果执行的时候提示有报错可能是缺少库文件,pip下载即可

client端配置:
一、在pycharm直接配置:
1、新建一个robot 文件

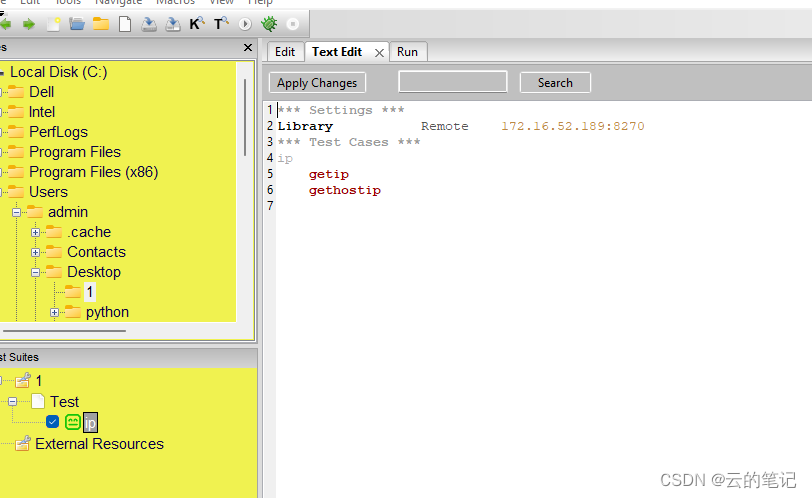
*** Settings ***
Documentation Suite description
Library Remote 172.16.52.189:8270 WITH NAME RemoteLib
#因为格式原因大小写、空格敏感,直接用“Library Remote 172.16.52.189:8270”引用lib会识别不了,所以要给“Remote 172.16.52.189:8270”设一个别名,格式如上
*** Test Cases ***
demoRemoteLib.getipRemoteLib.gethostip
#调用IpLibrary里面的方法的时候需要把lib名带上
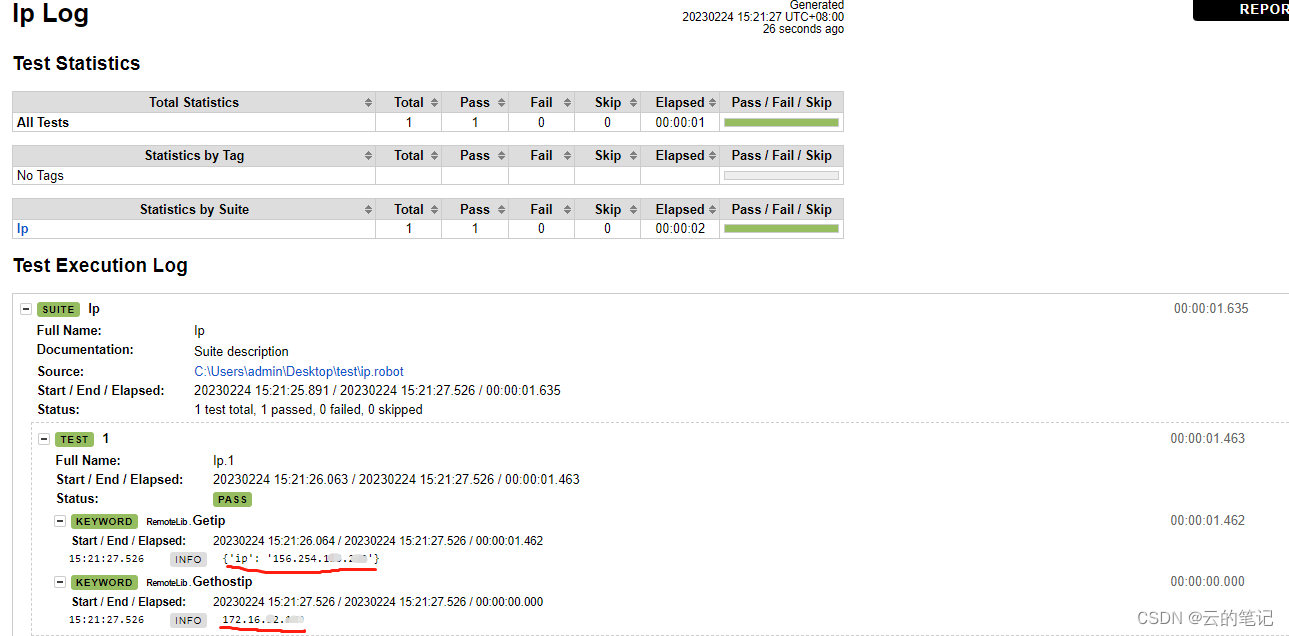
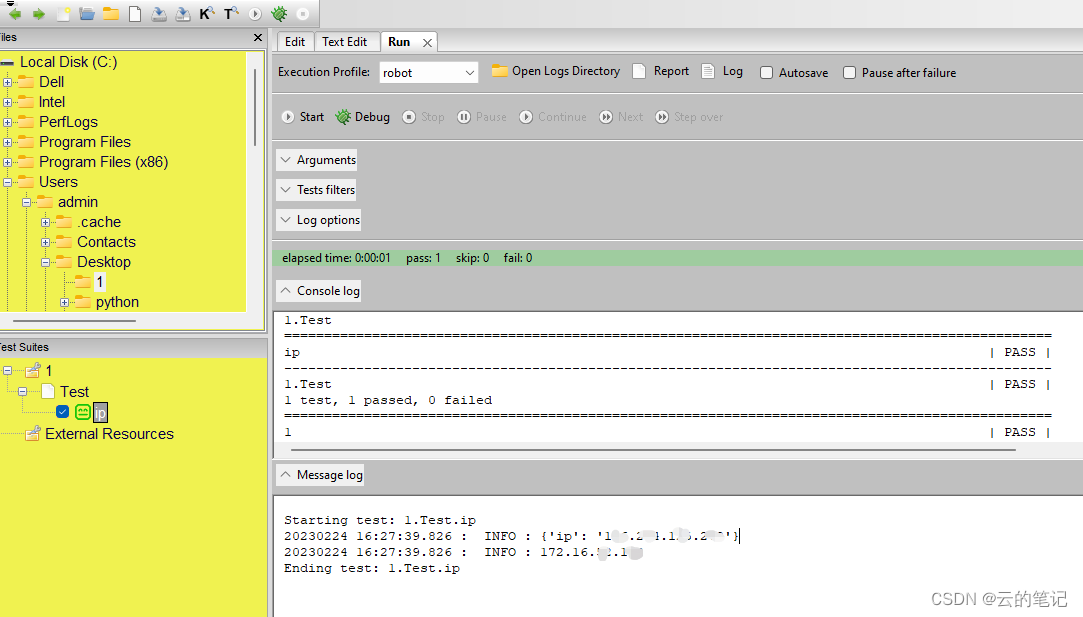
*** Keywords ***运行结果报告:
二、ride运行配置:
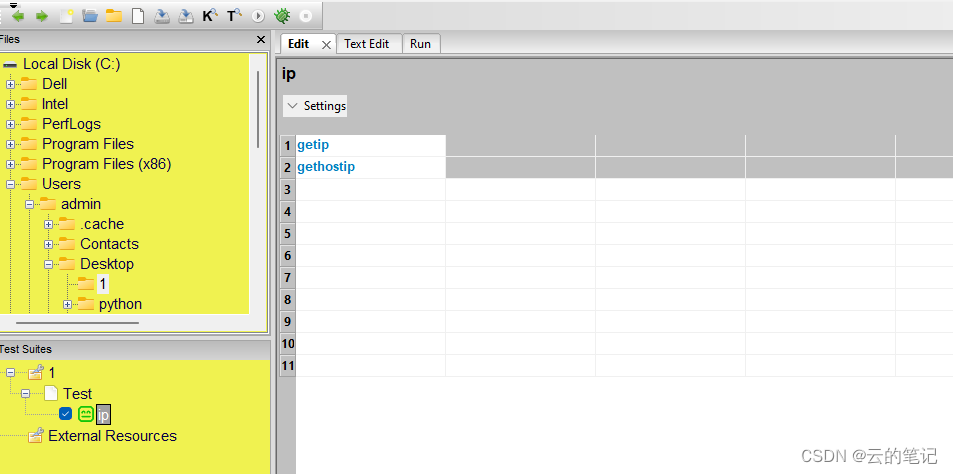
1、新建一个文件夹,打开ride,在该文件夹下新建suite

2、在suite下面新建test case:

3、在suite引入server端的lib。按F5或者点击左上角K图标,选择Remote库就可以看到自己写进去的方法了


6、可以在testcase里面直接用这些方法了
相关文章:
robot remote server用这个server去远程获取ip
server端配置: 1、安装python环境 2、下载robot remote server 下载地址:https://pypi.python.org/pypi/robotremoteserver/(不要用pip下载,把robotremoteserver.py文件下载下来) 3、首先创建一个目录E:\rfremote\ &a…...

【WSL】Windows 上安装并启动
一、什么是 WSL Windows Subsystem for Linux 适用于 Linux 的 Windows 子系统 可以帮助我们自然、方便地在 Windows 上使用 Linux 子系统 二、安装 我们要安装的是 WSL2 , 因为其功能相对来说更加完善 1. 简化安装 — 本人亲测不好用 简化安装:高…...
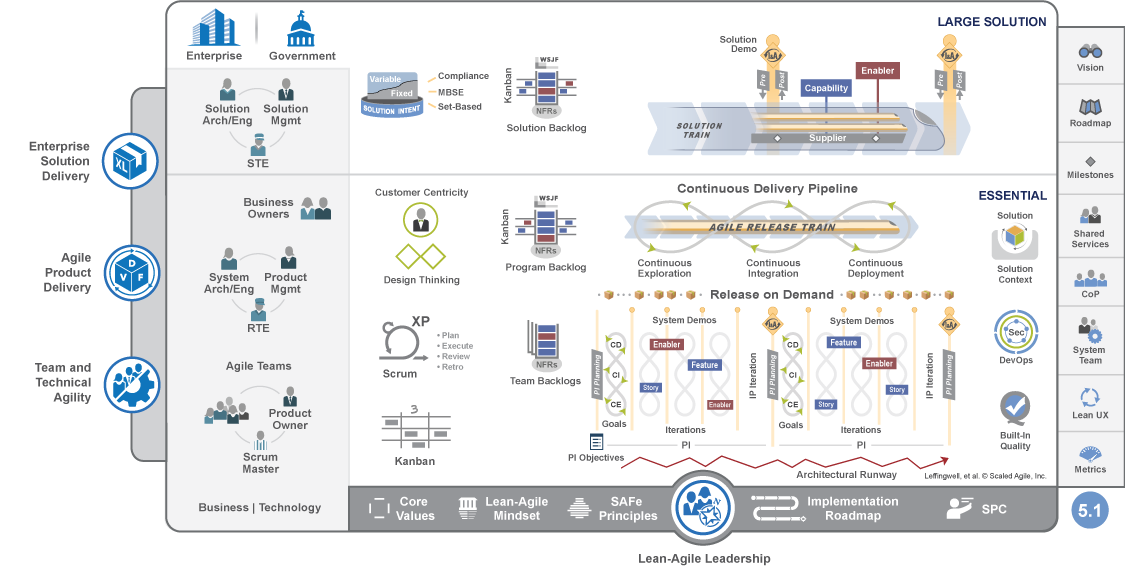
SAFe(Scaled Agile Framework)学习笔记
1.SAFe 概述 SAFe(Scaled Agile Framework)是一种面向大型企业的敏捷开发框架,旨在协调多个团队和部门的协同工作,以实现高效的软件开发和交付。下面是SAFe框架的简单介绍总结: SAFe框架包括以下四个层次:…...
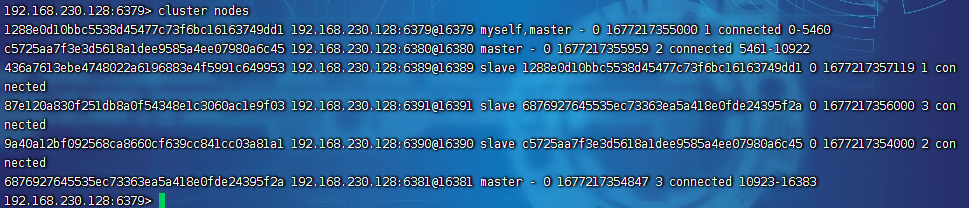
Redis 集群搭建
前缀参考文章1:Centos7 安装并启动 Redis-6.2.6 前缀参考文章2:Redis 主从复制-服务器搭建【薪火相传/哨兵模式】 管道符查看所有redis进程:ps -ef|grep redis 杀死所有redis进程:killall redis-server 1. 首先修改 redis.conf 配…...
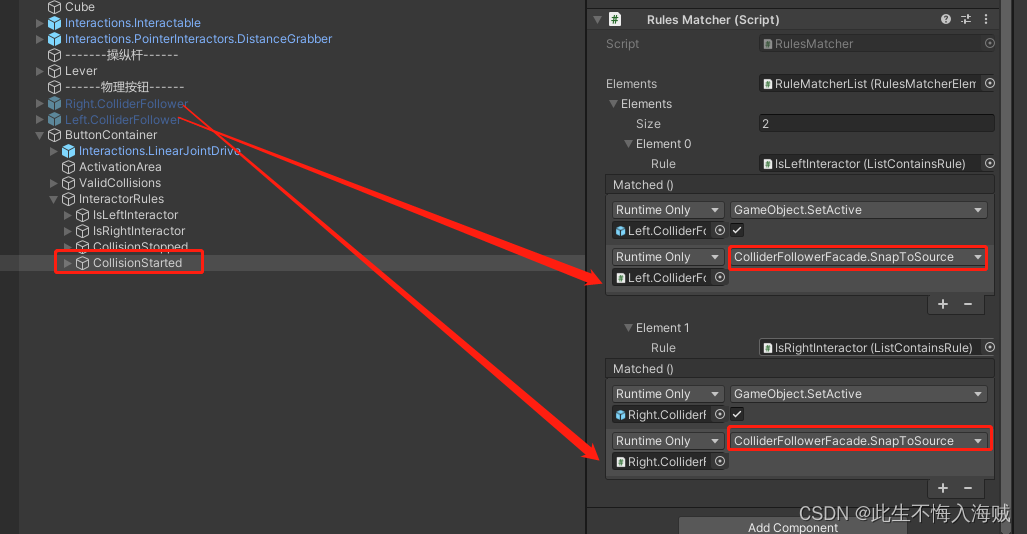
【Unity VR开发】结合VRTK4.0:创建物理按钮
语录: 如今我努力奔跑,不过是为了追上那个曾经被寄予厚望的自己 前言: 使用线性关节驱动器和碰撞体从动器可以轻松创建基于物理的按钮,以使交互者能够在物理上按下按钮控件,然后挂钩到驱动器事件中以了解按钮何时被按…...
【软件测试】web自动化测试如何开展合适?自动化测试用例如何设计?资深测试的总结......
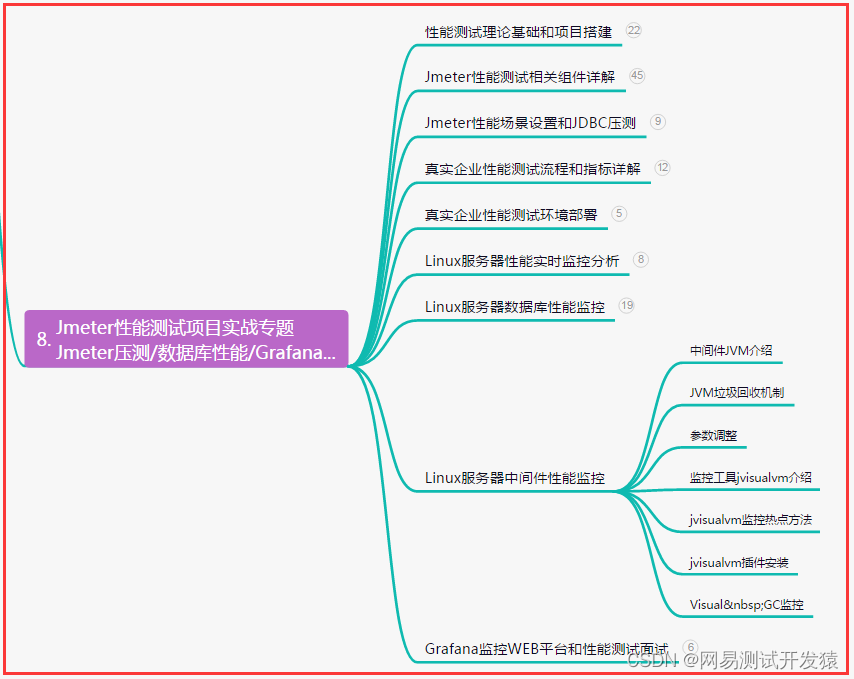
目录:导读前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜)前言 首先,还…...
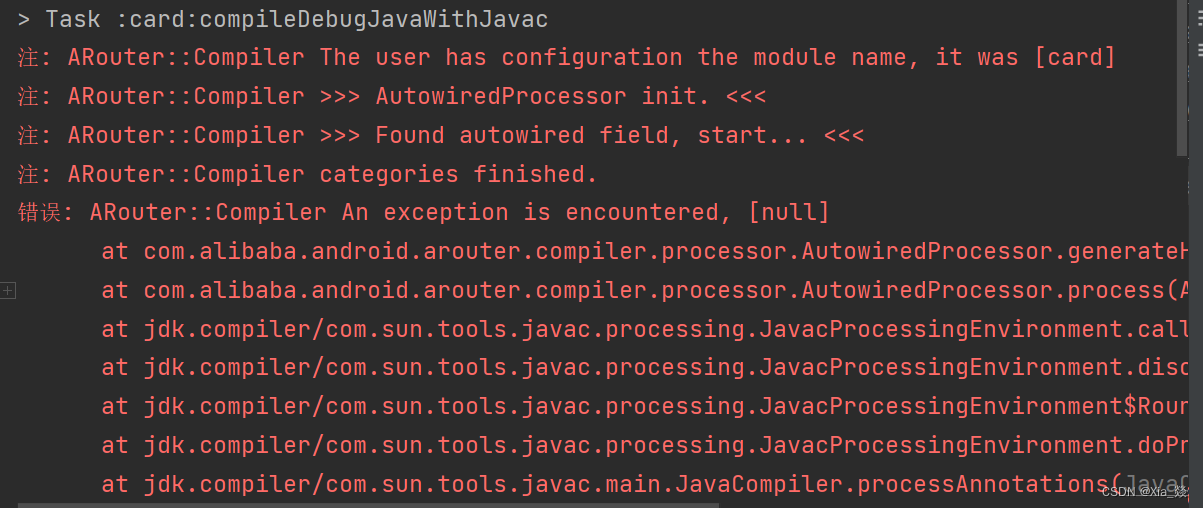
ARouter::Compiler The user has configuration the module name, it was
学习组件化使用的是阿里的ARouter,我是照着案例敲的,在编译的时候报了这么一个错。 我查了好多资料,大部分都是说build.gradle 配置出现了问题,比如没有配置 javaCompileOptions {annotationProcessorOptions {arguments [AROUTE…...

Jmeter(GUI模式)详细教程
Jmeter(GUI模式)详细教程 目录:导读 一、安装Jmeter 二、Jmeter工作原理 三、Jmeter操作步骤 Jmeter界面 1、测试计划 2、线程组 3、HTTP请求 4、监听器 四、压力测试 写在最后 前些天,领导让我做接口的压力测试。What…...
)
2023年CDGA考试-第14章-大数据和数据科学(含答案)
2023年CDGA考试-第14章-大数据和数据科学(含答案) 单选题 1.MapReduce模型有三个主要步骤 () A.剖析、关联、聚类 B.提取、转换、加载 C.映射、修正、转换 D.映射、洗牌、归并 答案 D 2.以下哪种技术已经成为面向数据科学的大数据集分析标准平台。 A.MPP技术。 B.Hado…...
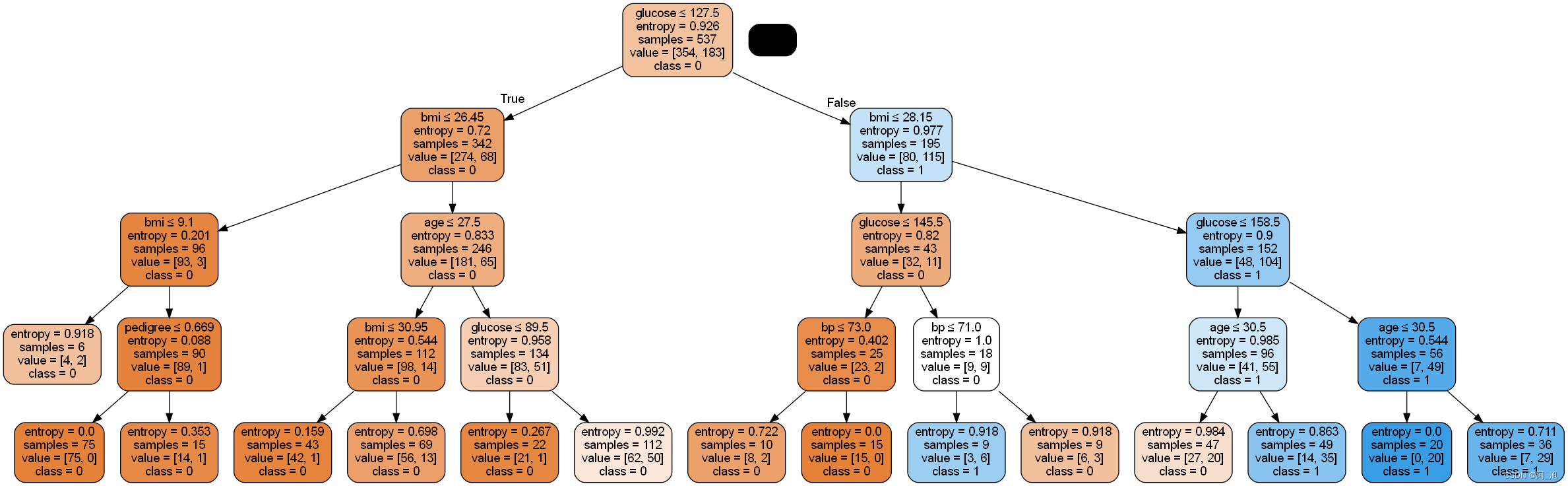
【阿旭机器学习实战】【36】糖尿病预测---决策树建模及其可视化
【阿旭机器学习实战】系列文章主要介绍机器学习的各种算法模型及其实战案例,欢迎点赞,关注共同学习交流。 【阿旭机器学习实战】【36】糖尿病预测—决策树建模及其可视化 目录【阿旭机器学习实战】【36】糖尿病预测---决策树建模及其可视化1. 导入数据并…...
简易黑客初级教程:黑客技术,分享教学
第一节,伸展运动。这节操我们要准备道具,俗话说:“工欲善其事,必先利其器”(是这样吗?哎!文化低……)说得有道理,我们要学习黑客技术,一点必要的工具必不可少。 1,一台属于自己的可以上网的电…...
日本公派访问学者的具体申请流程
公派日本访问学者的具体申请流程,知识人网整理了相关的资料以供大家参考。第一、申请材料一般申请CSC日本访问学者,截止日是每年的1月15号左右,但是学院在1月10号之前就审查材料了。材料包括:CSC网页的报名表,教授邀请…...

投票点赞链接制作投票链接在线制作投票图文链接制作点赞
用户在使用微信投票的时候,需要功能齐全,又快捷方便的投票小程序。而“活动星投票”这款软件使用非常的方便,用户可以随时使用手机微信小程序获得线上投票服务,很多用户都很喜欢“活动星投票”这款软件。“活动星投票”小程序在使…...
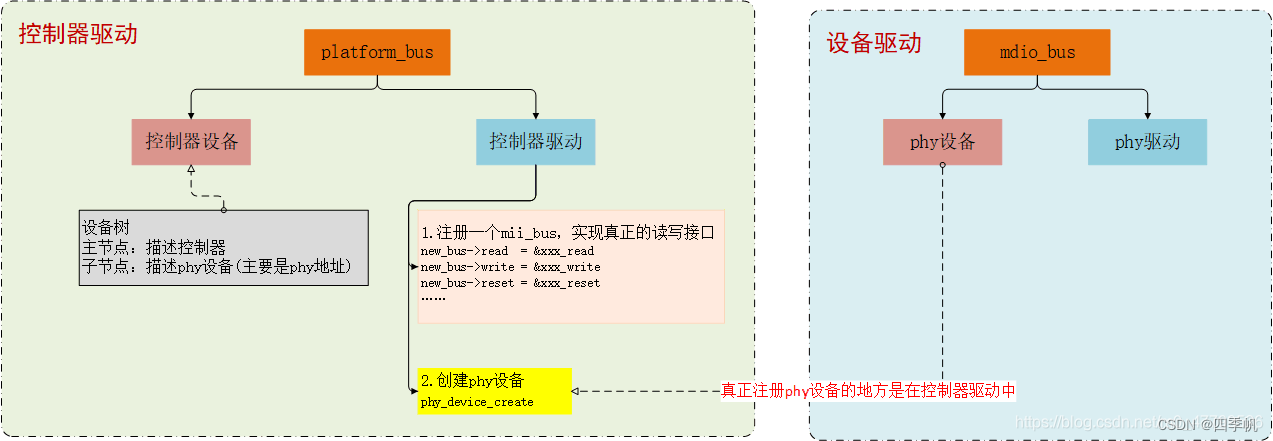
PHY设备驱动
1. 概述 MAC控制器的驱动使用的是platform总线的连接方式,PHY设备驱动是基于device、driver、bus的连接方式。 其驱动涉及如下几个重要部分: 总线 - sturct mii_bus (mii stand for media independent interface) 设备 - struct phy_device 驱动 - struc…...

Linux——UDP协议与相关套接字编程
一.概念在网络通信中,传输层中最常用的通信协议有两个:TCP协议与UDP协议。这两种协议虽然都可以用于网络通信,但是通信方式不同决定了应用场景的不同。与TCP协议相比,UDP协议最具特色的不同点有两个:无连接与面向数据报…...

EM算法 简明理解
E:Expection,期望步,利用估计的参数,来确定未知因变量的概率,并利用其来计算期望值。 M:Maximization,最大化,使用最大似然法更新参数值,使E步中期望值出现的概率最大。…...
论坛项目小程序和h5登录
项目中安装uview出现npm安装uview 直接报错:创建一个package.json配置文件在进行安装。cmd到项目。初始化一个package.json文件(vue项目的配置文件) npm init --yes 安装uview项目点击关注进入管页面,需要验证用户是否登录查用户是…...

kubernetes集群pod中的pause容器作用
kubernetes集群pod中的pause容器作用 我们搭建完集群了以后,可以使用最简单的方式创建一个pod,随意你建立什么pod,去访问相应node上执行docker ps 就会看到有一种pause容器,但是你可能从来没有启用 etrics-scraper_dashboard-me…...
分配内存、MySQL事务、项目、动态规划)
【2.24】malloc()分配内存、MySQL事务、项目、动态规划
malloc是如何分配内存的? 在 Linux 操作系统中,虚拟地址空间的内部又被分为内核空间和用户空间两部分,不同位数的系统,地址空间的范围也不同。比如最常见的 32 位和 64 位系统,如下所示: 内核空间与用户空…...
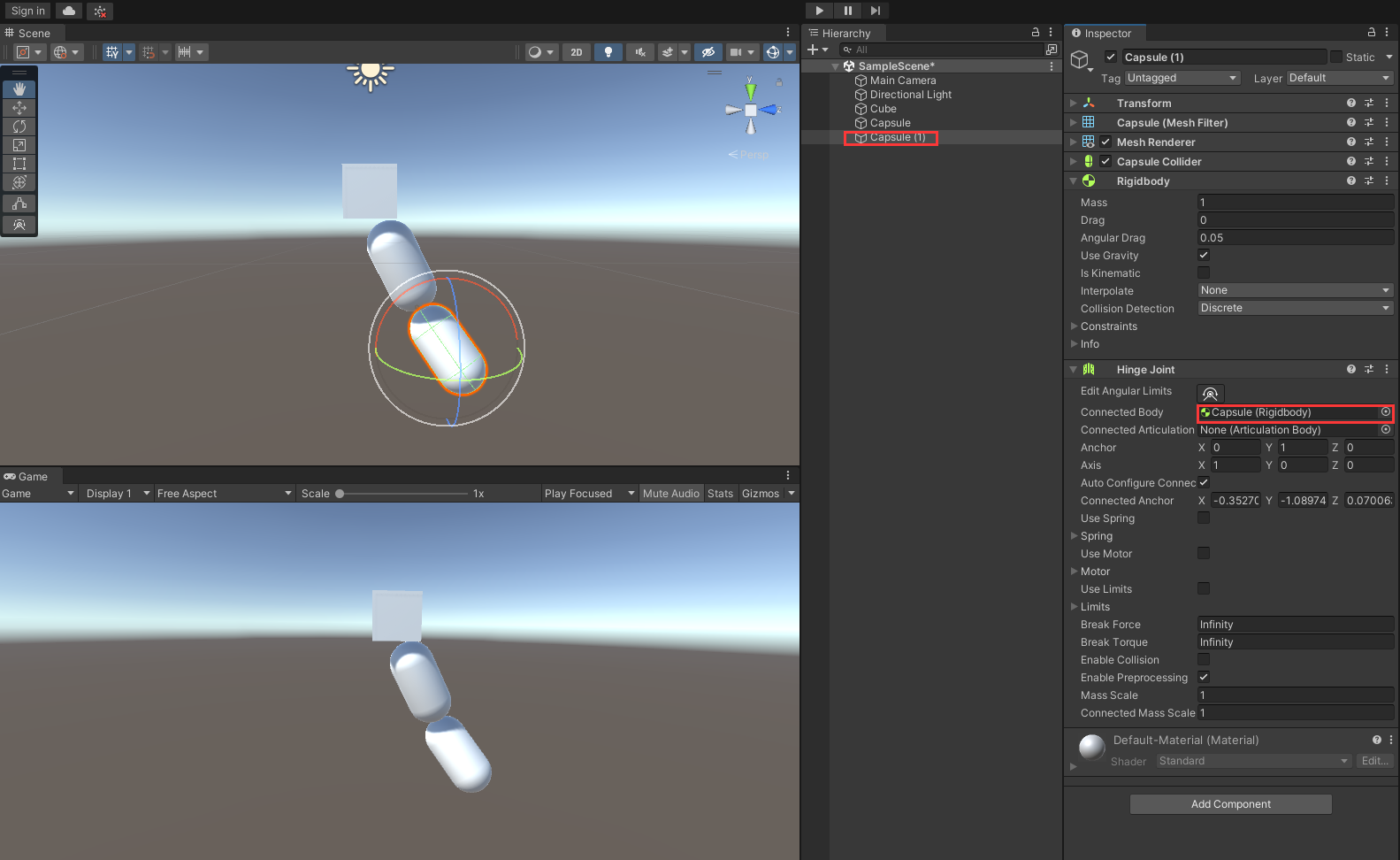
Unity——使用铰链关节制作悬挂物体效果
目的在场景中创建一个悬挂的物体,是把多个模型悬挂在一起可以自由摇摆,类似链条的效果效果图前言什么是铰链关节?铰链关节 将两个刚体(Rigid body)组会在一起,从而将其约束为如同通过铰链连接一样进行移动。…...

区块链与计算机视觉融合:构建可信机器感知系统的架构与实践
1. 项目概述:当计算机视觉遇见区块链在人工智能的浪潮中,计算机视觉(CV)无疑是那颗最耀眼的明星之一。它让机器拥有了“看”和理解世界的能力,从医疗影像中精准定位病灶,到自动驾驶汽车识别路况,…...

超参数调优效率提升300%:Advisor与传统调参工具深度对比
超参数调优效率提升300%:Advisor与传统调参工具深度对比 【免费下载链接】advisor Open-source implementation of Google Vizier for hyper parameters tuning 项目地址: https://gitcode.com/gh_mirrors/ad/advisor 在机器学习模型开发中,超参数…...

激光辅助侧信道攻击技术解析与应用
1. 激光辅助侧信道攻击技术概述在硬件安全研究领域,侧信道分析(Side-Channel Analysis, SCA)已经发展成为破解加密系统的重要手段。这种攻击方式不直接攻击算法本身的数学强度,而是通过测量设备运行时的物理特性变化(如功耗、电磁辐射、时序等…...

JMeter接口测试实战:从鉴权验证到故障注入的工程化落地
1. 为什么接口测试不能只靠“点点点”——JMeter不是高级版Postman,而是工程化验证的起点很多人第一次接触JMeter,是在开发甩来一个接口文档后,下意识打开Postman填URL、选Method、点Send,看到返回200就松一口气:“通了…...

5分钟掌握BepInEx游戏插件框架:Unity模组开发的完整解决方案
5分钟掌握BepInEx游戏插件框架:Unity模组开发的完整解决方案 【免费下载链接】BepInEx Unity / XNA game patcher and plugin framework 项目地址: https://gitcode.com/GitHub_Trending/be/BepInEx BepInEx(Bepis Injector Extensible࿰…...

泳装电商运营——AI驱动增长新引擎
泳装电商运营——AI驱动增长新引擎泳装旺季营销攻略:如何用AI工具实现销量翻倍?泳装行业的季节性特征明显,旺季不旺是很多商家的痛点。如何在短短几个月的销售窗口期内最大化产出?北京先智先行科技有限公司的一站式AI营销解决方案…...

服务器末级缓存优化:指令-数据关联性管理技术
1. 服务器工作负载中的末级缓存挑战在现代多核处理器架构中,共享末级缓存(Shared Last-Level Cache, LLC)的性能优化一直是计算机体系结构研究的核心课题。随着云计算和分布式计算的普及,服务器工作负载呈现出两个显著特征:指令足迹(instruct…...

DECO项目架构解析:从源码理解装饰器并发模型的设计哲学
DECO项目架构解析:从源码理解装饰器并发模型的设计哲学 【免费下载链接】deco 项目地址: https://gitcode.com/gh_mirrors/de/deco DECO(Decorated Concurrency)是一个革命性的Python并行计算框架,它通过装饰器实现了简洁…...

职业会崩塌,岗位会消失,聪明的技术人该何去何从?
凌晨两点,写字楼的灯还亮着。我盯着屏幕上第 37 次运行的测试用例,咖啡杯里沉淀着今天的第三份浓缩。突然弹出一条消息:“系统架构升级,你的岗位可能被优化”。那一刻,我忽然意识到:我精心打磨的"职业…...

hccl:昇腾 NPU 的“多卡通信库”
hccl:昇腾 NPU 的“多卡通信库” 之前帮朋友看多 NPU 训练的代码,发现他自己手写了很多通信算子(AllReduce/Broadcast/AllGather 等)——在多 NPU 之间传数据,光写通信层就写了 3,000 行,而且还不稳定&…...