stm32学习笔记:中断的应用:对射式红外传感器计次旋转编码器计次
相关API介绍
EXT配置API(stm32f10x exti.h)
 NVIC 配置API (misc.h)
NVIC 配置API (misc.h)
初始化的中断的步骤
第一步:配置RCC时钟,把涉及外设的时钟都打开
第二步:配置GPIO,设置为输入模式
第三步:配置AFIO,选择某个GPIO口连接到EXTI(边缘检测及控制器)
第四步:配置EXTI(不需要开启时钟,原因不详),选择边沿触发方式和触发响应方式
边沿触发方式:上升沿、下降沿、或者双边沿,触发响应方式:中断响应和事件响应
第五步:配置NVIC(内核的外设,不需要开启时钟),给中断选择一个合适的优先级
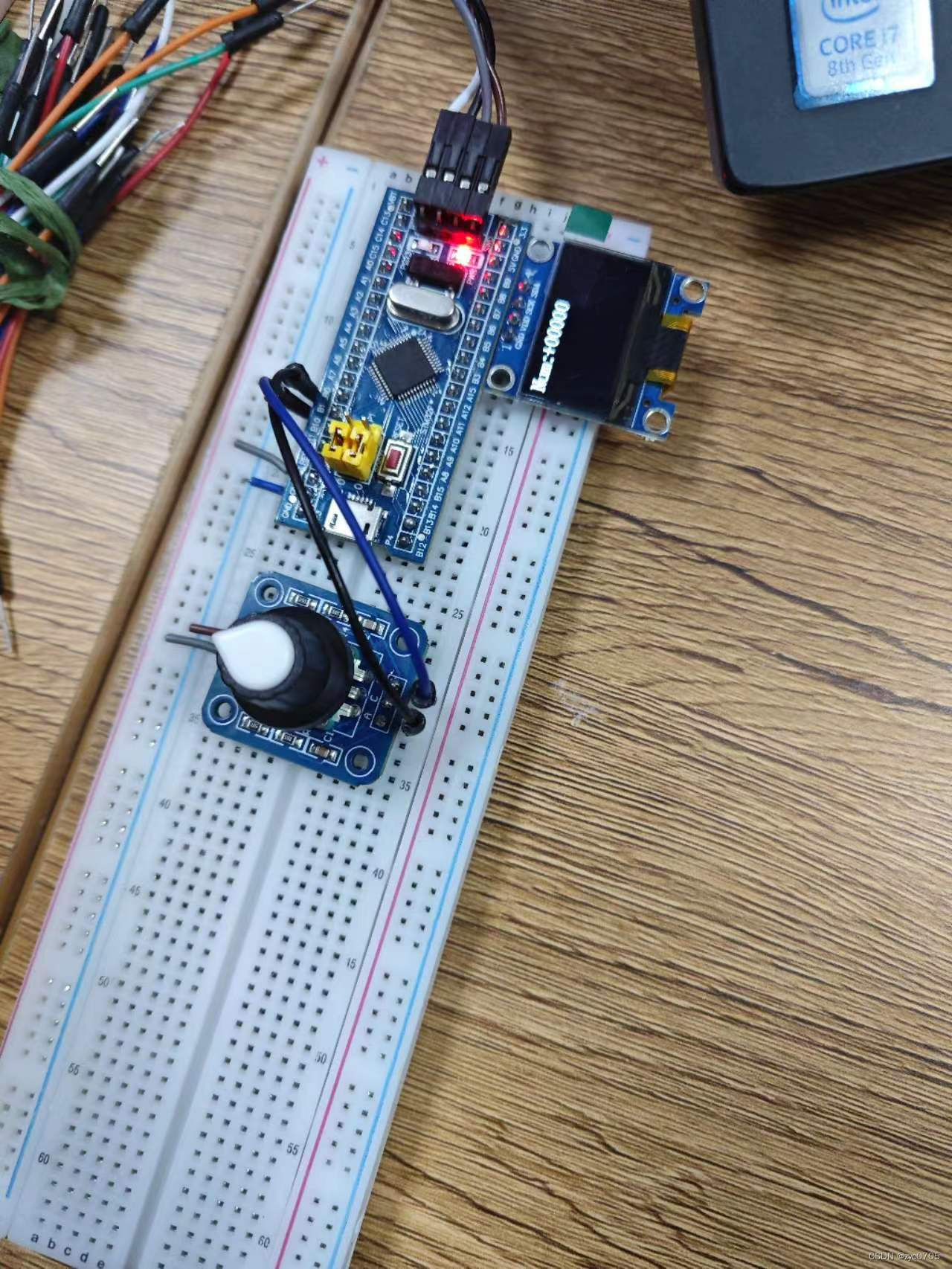
对射式红外传感器计次

CountSensor.h
#ifndef __COUNT_SENEOR_H
#define __COUNT_SENEOR_Hextern void CountSensor_Init(void);
extern uint16_t CountSensor_Get(void);#endif
CountSensor.c
#include "stm32f10x.h" // Device headeruint16_t CountSensor_Count;void CountSensor_Init(void)
{//第一步:配置RCC时钟,把涉及外设的时钟都打开//第二步:配置GPIO,设置为输入模式//第三步:配置AFIO,选择某个GPIO口连接到EXTI(边缘检测及控制器)//第四步:配置EXTI(不需要开启时钟,原因不详),选择边沿触发方式和触发响应方式//边沿触发方式:上升沿、下降沿、或者双边沿,触发响应方式:中断响应和事件响应//第五步:配置NVIC(内核的外设,不需要开启时钟),给中断选择一个合适的优先级//对射式红外传感器:B14RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;//参考手册中文版中,第八章GPIO有说明说明外设设置什么格式GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入,默认为高电平GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);//配置AFIO的数据选择器,选择想要的中断引脚GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource14);EXTI_InitTypeDef EXTI_InitStructure;EXTI_InitStructure.EXTI_Line = EXTI_Line14;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断模式(而不是事件响应)//三种,上升沿,下降沿,上升沿+下降沿EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发EXTI_Init(&EXTI_InitStructure);//5种分组方式选择其中的一种NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;//在stm32f10x.h中选择,该芯片是MD中等密度的,锁选择STM32F10X_MD即可//stm32的EXTI10到EXTI15都是合并到EXTI15_10_IRQn通道的NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;//指定通道NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//在misc文件中查找NVIC_Priority_Table,查的分组2的抢占优先级和响应优先级的取值范围均为0-3NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);
}uint16_t CountSensor_Get(void)
{return CountSensor_Count;//全局变量
}//中断函数不需要申明,因为不需要调用,是直接申明的
//中断函数都是无参,无返回值
void EXTI15_10_IRQHandler(void) //中断函数的名字都是固定的
{//因为10-15通道都可以进来,故要判断是不是想要的14通道进来if (EXTI_GetITStatus(EXTI_Line14) == SET){/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14) == 0){CountSensor_Count ++;}//中断程序结束后,一定要再调用一下清楚中断标志位的函数,//只有中断标志位置1,程序就会跳转到中断函数//如果不清除中断标志位,就会一直申请中断,//这样程序就会不断响应中断,执行中断函数,程序就会卡死在中断函数中EXTI_ClearITPendingBit(EXTI_Line14);}
}main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"int main(void)
{OLED_Init();CountSensor_Init();//从第一行,第一列开始写OLED_ShowString(1, 1, "Count:");while (1){//从第一行第7列开始写OLED_ShowNum(1, 7, CountSensor_Get(), 5);}
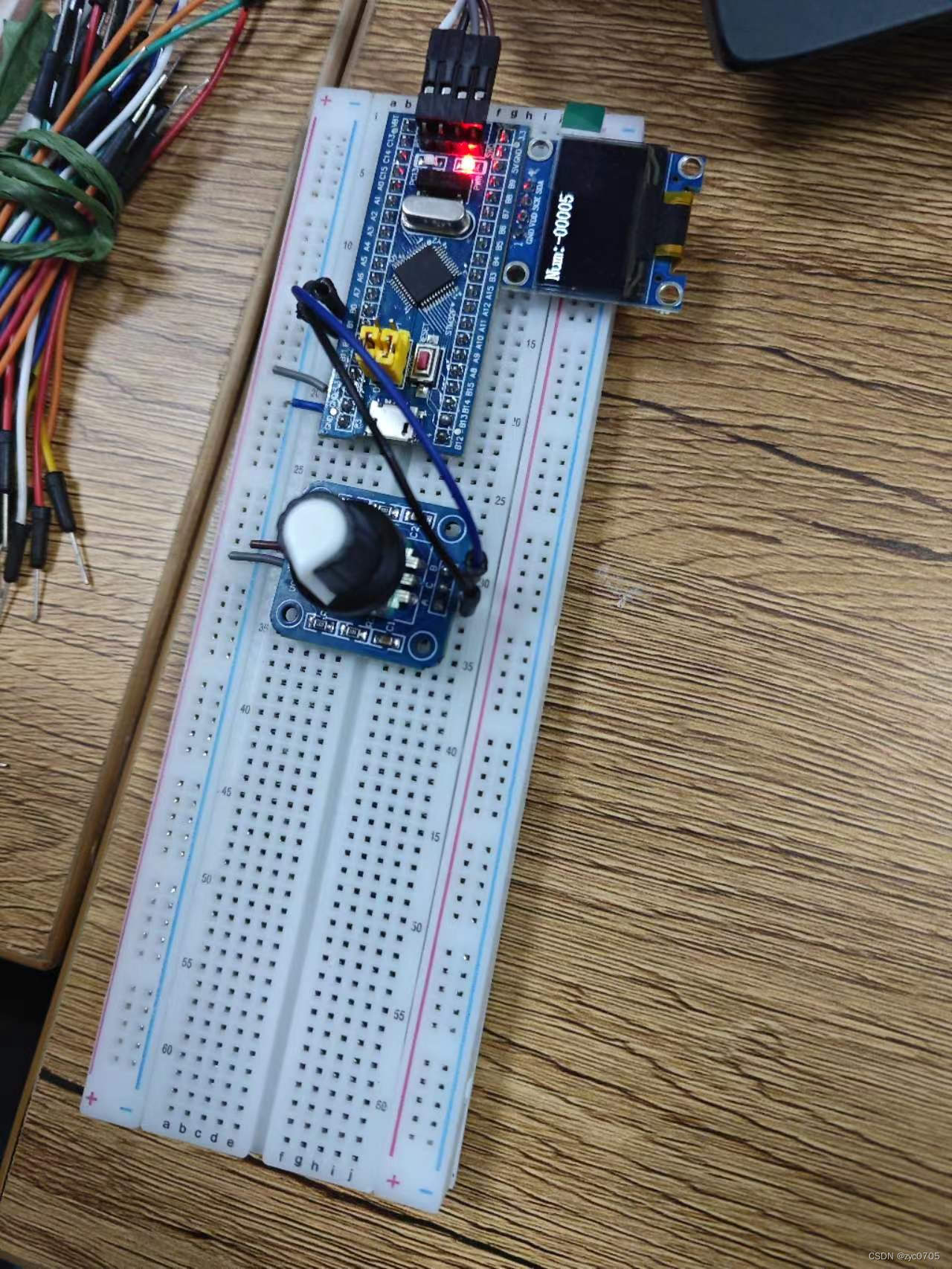
}旋转编码器计次
Encoder.c
如果把A相的下降沿用作触发中断,在中断时刻读取B相的电平
则正转是高电平,反转是低电平
正转时,A相先出现下降沿,所以刚开始动,就进中断了
反转后,A相先出现下降沿,转到位了,才进入中断故该实验:A、B相都触发中断
正转:B相下降沿、A相低电平
反转:A相下降沿、B相低电平
这样保证正转和反转都是转到位,才执行数字加减的操作
#include "stm32f10x.h" // Device header
#include "Delay.h"int16_t EncoderCount = 0;void Encoder_Init(void)
{// 配置RCC, 将涉及到的外设全部打开, 不打开时钟外设无法工作// EXTI 和 NVIC 的时钟是一直打开的, 不需要再开启时钟了, 因为 NVIC 是内核的外设RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // 开启 GPIOB 的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); // 开启 AFIO 的时钟// 配置 GPIO_Pin_B0 | GPIO_Pin_B1, 设置端口为输入模式GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉、下拉、浮空输入均可GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure);// 配置 AFIO, 选择我们用的 GPIO 到后面的 EXTIGPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0); // PB0 -> EXTI0GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1); // PB1 -> EXTI1// 配置 EXTI: 将EXTI的第0、1个线路配置为中断模式、下降沿触发、然后开启中断EXTI_InitTypeDef EXTI_InitStruct;EXTI_InitStruct.EXTI_Line = EXTI_Line0 | EXTI_Line1; // 选择PB0 所在的第0个线路、选择 PB1 所在的第1个线路EXTI_InitStruct.EXTI_LineCmd = ENABLE; // 开启中断EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt; // 中断模式 或 事件模式EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Falling; // 下降沿触发 EXTI_Init(&EXTI_InitStruct);// 配置 NVIC, 给 EXTI0 中断选择一个合适的优先级, 最终外部中断信号就能进入 CPU 了NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 2位抢占, 2位响应, 整个工程需要设置成一致的.NVIC_InitTypeDef NVIC_InitStruct;NVIC_InitStruct.NVIC_IRQChannel = EXTI0_IRQn; // 选择进入 NVIC 的通道 NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; // 通道使能NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1; // 抢占优先级: 0~3NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; // 响应优先级: 0~3NVIC_Init(&NVIC_InitStruct);// 配置 NVIC, 给 中断选择一个合适的优先级, 最终外部中断信号就能进入 CPU 了NVIC_InitStruct.NVIC_IRQChannel = EXTI1_IRQn;NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; // 通道使能NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1; // 抢占优先级: 0~3NVIC_InitStruct.NVIC_IRQChannelSubPriority = 2; // 响应优先级: 0~3NVIC_Init(&NVIC_InitStruct);
}void EXTI0_IRQHandler(void)
{ITStatus res = EXTI_GetITStatus(EXTI_Line0); // 判断是否是 EXIT0if(SET == res) {// 抖动延时下 Delay_ms(3);if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0 && GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) // 正转{EncoderCount--;}EXTI_ClearITPendingBit(EXTI_Line0); // 清除中断标志位}
}void EXTI1_IRQHandler(void)
{ITStatus res = EXTI_GetITStatus(EXTI_Line1); // 判断是否是 EXIT1if(SET == res) {// 抖动延时下 Delay_ms(3);if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0 && GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0) // 反转{EncoderCount++;}EXTI_ClearITPendingBit(EXTI_Line1); // 清除中断标志位}
}int16_t Encoder_Get(void)
{int16_t Temp = EncoderCount;EncoderCount = 0;return Temp;
}
Encoder.h
#ifndef __ENCODER_H
#define __ENCODER_Hextern void Encoder_Init(void);
extern int16_t Encoder_Get(void);#endif
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "oled.h"
#include "encoder.h"static int16_t Num = 0;int main(void)
{ OLED_Init();Encoder_Init();OLED_ShowString(1, 1, "Num:");while(1) {Num += Encoder_Get();OLED_ShowSignedNum(1, 5, Num, 5);}
}
相关文章:
stm32学习笔记:中断的应用:对射式红外传感器计次旋转编码器计次
相关API介绍 EXT配置API(stm32f10x exti.h) NVIC 配置API (misc.h) 初始化的中断的步骤 第一步:配置RCC时钟,把涉及外设的时钟都打开 第二步:配置GPIO,设置为输入模式 第三步:配置AFIO࿰…...

one-hot是什么
“one-hot” 是一种编码技术,通常用于机器学习和数据处理中,用来表示分类数据或离散变量。它的目的是将一个分类变量转换成二进制向量,其中只有一个元素是 “hot”(值为1),而其他元素都是 “cold”…...

基于阿基米德优化优化的BP神经网络(分类应用) - 附代码
基于阿基米德优化优化的BP神经网络(分类应用) - 附代码 文章目录 基于阿基米德优化优化的BP神经网络(分类应用) - 附代码1.鸢尾花iris数据介绍2.数据集整理3.阿基米德优化优化BP神经网络3.1 BP神经网络参数设置3.2 阿基米德优化算…...

ubuntu20.04配置阿里的kubernetes源
不仅适用于kubernetes软件源的配置,同样适用于其他软件源 1、安装依赖 sudo apt-get update # apt-transport-https may be a dummy package; if so, you can skip that package sudo apt-get install -y apt-transport-https ca-certificates curl 2、配置gpg签名…...

【运维】一些团队开发相关的软件安装。
gitlab 安装步骤 (1) 下载镜像,并且上传到服务器 https://mirrors.tuna.tsinghua.edu.cn/gitlab-ce/yum/el7/gitlab-ce-16.2.8-ce.0.el7.x86_64.rpm (2)rpm -i gitlab-ce-16.2.8-ce.0.el7.x86_64.rpm (3)安装成功后…...

互联网Java工程师面试题·Java 并发编程篇·第七弹
目录 16、CAS 的问题 17、什么是 Future? 18、什么是 AQS 19、AQS 支持两种同步方式: 20、ReadWriteLock 是什么 21、FutureTask 是什么 22、synchronized 和 ReentrantLock 的区别 23、什么是乐观锁和悲观锁 24、线程 B 怎么知道线程 A 修改了…...

SQL语句常见分类
SQL是Structured Query Language(结构化查询语言)的简写。 Structured发音 SQL 是关系型数据库管理系统的标准语言,如Oracle、MySQL、Microsoft SQL Server。 DDL DDL是Data Definition Language(数据定义语言)的简…...
SpringBoot通过配置切换注册中心(多注册中心nacos和eureka)
场景: 因项目需要,一个springcloud微服务工程需要同时部署到A,B两个项目使用,但A项目使用Eureka注册中心,B项目使用Nacos注册中心,现在需要通过部署时修改配置来实现多注册中心的切换。 解决思路: 如果同时…...

自动驾驶学习笔记(三)——场景设计
#Apollo开发者# 学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门 《2023星火培训【感知专项营】》免费课程—>传送门 文章目录 前言 场景设计平台 场景地图 场景基本…...
第 115 场 LeetCode 双周赛题解
A 上一个遍历的整数 模拟 class Solution { public:vector<int> lastVisitedIntegers(vector<string> &words) {vector<int> res;vector<int> li;for (int i 0, n words.size(); i < n;) {if (words[i] ! "prev")li.push_back(stoi…...
排行榜示例)
【IDE插件教学】华为云应用中间件系列—Redis实现(电商游戏应用)排行榜示例
云服务、API、SDK,调试,查看,我都行 阅读短文您可以学习到:应用中间件系列之Redis实现(电商游戏应用)排行榜示例 1 什么是DEVKIT 华为云开发者插件(Huawei Cloud Toolkit)&a…...
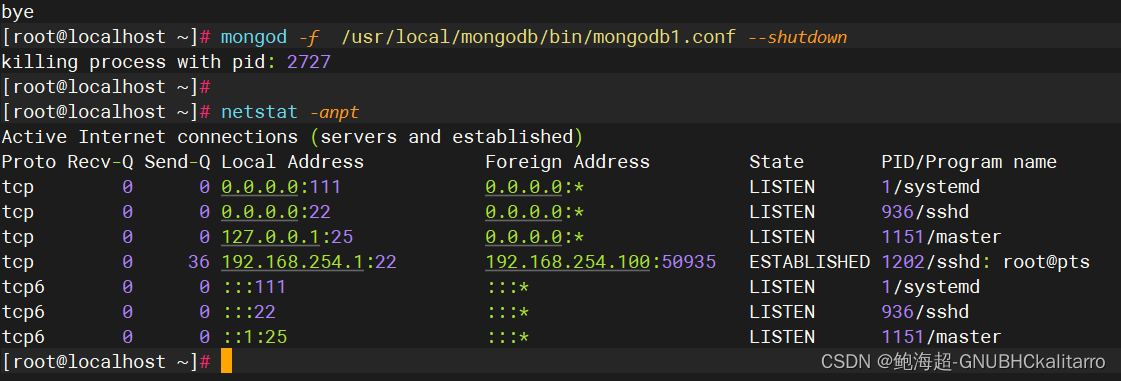
Linux:mongodb数据库源码包安装(4.4.25版本)
环境 系统:centos7 本机ip:192.168.254.1 准备的mongodb包 版本 : 4.4.25 全名称:mongodb-linux-x86_64-rhel70-4.4.25.tgz 下载源码包 Download MongoDB Community Server | MongoDBhttps://www.mongodb.com/try/downloa…...

pdf怎么合并在一起?
pdf怎么合并在一起?对于pdf合并这个问题,有的小伙伴想很简单,只需要将文件直接复制再其中的一个后面不就完事了吗。其实不然,因为我们如果要是需要将很多文件进行合并的话,就会产生很多问题的。总之,在现在…...
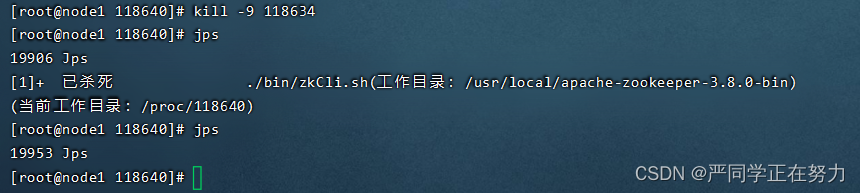
杀死僵尸进程ZooKeeperMain
关闭Hadoop后jps发现还有个进程ZooKeeperMain没有关闭,使用kill -9 <>也没有用,这种就是僵尸进程,需要用父进程ID来杀死 解决方法 话不多说,直接上解决方案, 1. 第一步 清楚需要关闭的进程ID,我…...

JavaScript class和function的区别
待整理: 一 二 Class 组件和 Function 组件是 React 中创建组件的两种主要方式。他们在语法和功能上有一些不同。以下分点是 Class 组件和 Function 组件在不同方面的对比: 1. 语法结构 Class 组件: import React, { Component } from …...

MySQL8.0修改mysql允许远程连接
1、连接服务器: mysql -u root -p2、看当前所有数据库:show databases; 3、进入mysql数据库:use mysql; 4、查看mysql数据库中所有的表:show tables; 5、查看user表中的数据:select Host, User,Password from user; 6、修改us…...
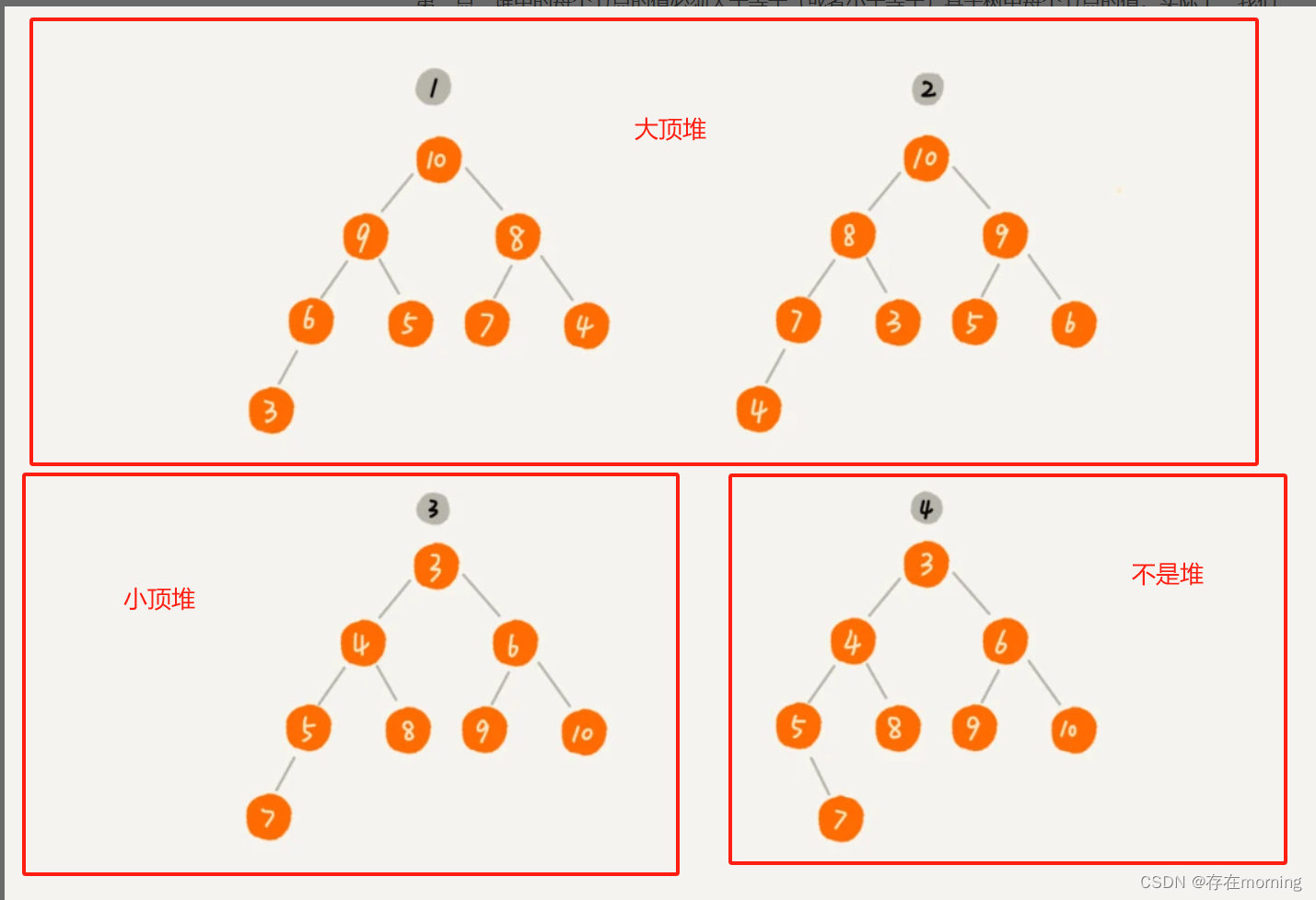
【算法训练-排序算法 二】【手撕排序】快速排序、堆排序、归并排序
废话不多说,喊一句号子鼓励自己:程序员永不失业,程序员走向架构!本篇Blog的主题是【手撕排序系列】,使用【数组】这个基本的数据结构来实现,这个高频题的站点是:CodeTop,筛选条件为&…...
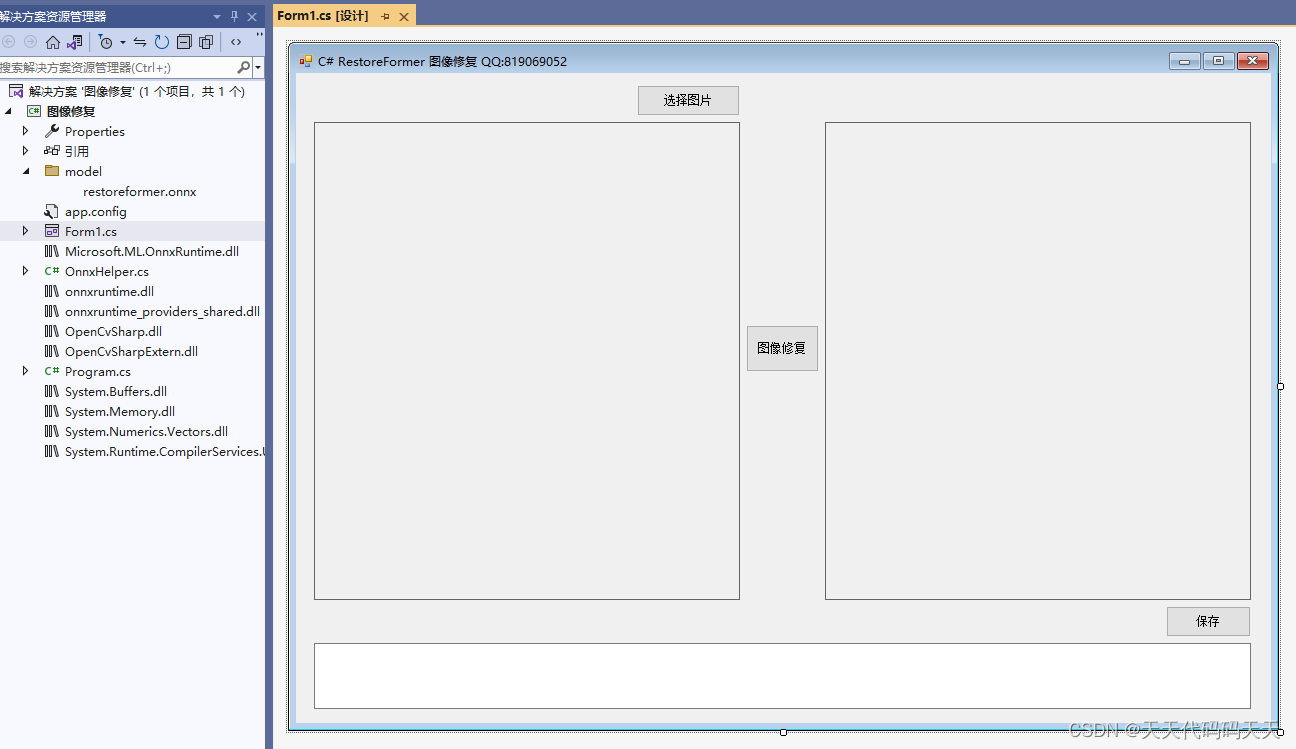
C# RestoreFormer 图像修复
效果 项目 代码 using Microsoft.ML.OnnxRuntime; using Microsoft.ML.OnnxRuntime.Tensors; using OpenCvSharp; using System; using System.Collections.Generic; using System.Drawing; using System.Drawing.Imaging; using System.Windows.Forms;namespace 图像修复 {pu…...

yolov5+车辆重识别【附代码】
本篇文章主要是实现的yolov5和reid结合的车辆重识别项目。是在我之前实现的yolov5_reid行人重识别的代码上修改实现的baseline模型。 目录 相关参考资料 数据集说明 环境说明 项目使用说明 vehicle reid训练 yolov5车辆重识别 从视频中获取想要检测的车(待检测车辆) 车…...

C语言练习百题之#ifdef和#ifndef的应用
#if, #ifdef, 和 #ifndef 是C语言预处理指令,它们可以用于条件编译,帮助控制程序的编译过程。以下是各种应用场景以及一些注意事项: 1. 使用 #ifdef 和 #ifndef 检查宏是否定义: 应用场景: 检查宏是否已经在代码中定义…...

告别桌面图标混乱:NoFences让你的数字空间井然有序
告别桌面图标混乱:NoFences让你的数字空间井然有序 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 你是否曾打开电脑就被满屏散乱的图标淹没?工作文件…...

Galaxy UI组件库深度解析:3000+开源UI元素的完整实践手册
Galaxy UI组件库深度解析:3000开源UI元素的完整实践手册 【免费下载链接】galaxy The largest Open-Source UI Library! Community-made and free to use. Made with either CSS or Tailwind. 项目地址: https://gitcode.com/gh_mirrors/gal/galaxy 在当今快…...

颠覆传统游戏体验:Sunshine云游戏串流平台让你随时随地畅玩PC游戏
颠覆传统游戏体验:Sunshine云游戏串流平台让你随时随地畅玩PC游戏 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 你是否曾梦想过在旅途中用平板继续昨晚未完成的3A大作…...

腾讯文档协作全攻略:从权限设置到区域锁定,团队办公效率翻倍
腾讯文档团队协作高阶指南:权限控制与区域锁定的艺术 在数字化办公时代,团队协作的效率往往决定了项目的成败。作为国内领先的在线协作文档工具,腾讯文档凭借其流畅的实时协作体验和丰富的权限管理功能,已经成为众多团队的首选工具…...

元宇宙拆迁队:强拆违规建筑日入十万
从Bug猎人到空间执法官当传统的软件测试工程师还在为揪出一个隐蔽的NullPointerException而欢欣鼓舞时,一片更为广阔、也更为凶险的新战场已经悄然开启——元宇宙。在这里,代码的缺陷不再仅仅导致程序崩溃或数据丢失,它们会具象化为扭曲的空间…...

2021必修 首门CSS架构系统精讲 理论+实战玩转蘑菇街 百度网盘
在前端开发的职场鄙视链里,存在一个极其普遍的误区:认为电商页面就是“简单的列表详情”,没什么技术含量。殊不知,电商是前端技术最残酷的练兵场:毫秒级的首屏速度、像素级的视觉还原、千人千面的动态布局、以及大促期…...
)
VSCode + WSL-Ubuntu 20.04 开发环境配置:从零搭建C++开发环境(含Clangd智能补全)
VSCode WSL-Ubuntu 20.04 开发环境配置:从零搭建C开发环境(含Clangd智能补全) 在跨平台开发日益普及的今天,微软推出的WSL(Windows Subsystem for Linux)为Windows开发者提供了无缝的Linux开发体验。结合…...

Scarab:重构空洞骑士模组管理体验的技术实践
Scarab:重构空洞骑士模组管理体验的技术实践 【免费下载链接】Scarab An installer for Hollow Knight mods written in Avalonia. 项目地址: https://gitcode.com/gh_mirrors/sc/Scarab 问题溯源:模组管理的隐性成本与技术瓶颈 量化手动管理的效…...

5个关键步骤:使用SMUDebugTool解决AMD Ryzen硬件调试难题
5个关键步骤:使用SMUDebugTool解决AMD Ryzen硬件调试难题 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https:/…...

Bootstrap4 导航栏详解
Bootstrap4 导航栏详解 引言 Bootstrap 是一个流行的前端框架,它为开发者提供了丰富的组件和工具,以快速构建响应式、移动优先的网站和应用程序。导航栏是网站的重要组成部分,它能够帮助用户轻松地在网站的不同页面之间导航。Bootstrap4 提供…...