模型预测控制(MPC)中考虑约束中的不确定性(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现及文献

💥1 概述
模型预测控制(model predictive control)顾名思义有三个主要部分构成,1模型;2预测;3控制(做决策),我们只要理解这三个部分和它们之间的关系即可。
1 模型,模型可以是机理模型,也可以是一个基于数据的模型(例如用神经网络training 一个model出来)
2 预测,建立模型的目的是什么呢?建立一个模型并不是放在那里拿来看的,多半是用来做预测用的。我们每天的生活中就在不停地做建模和预测的事情,例如你过马路的时候,会预测一下是否有车能撞到你,例如我们周末想出去旅游了,可能就会去看一下天气预报。在实际生产中也有很多类似的例子,淘宝会预测每件商品未来7天的购买量,物理学家会用牛顿三大定律预测小行星的运动轨迹。
3 控制(做出决策),控制就是我需要做出动作了,在前面的例子中对应起来就是,例如你过马路的时候,会预测一下是否有车能撞到你,如果没有你就赶快过马路(控制动作)。例如淘宝会预测商品未来7天的购买量,就要看如果说有一些商品缺货了的话就赶紧去调货或者生产(控制动作),例如物理学家用牛顿三大定律预测小行星运动轨迹,如果预测到小行星会撞击到地球的话,那就提前需要采取措施来避免小行星的撞击(控制动作)。
在上面的三个例子中,第一个例子你用的是你的大脑根据以往经验学到的模型来做预测,第二个例子中可能你会用神经网络,决策树啊等等机器学习学习到的模型(说到这里可能很多童鞋会比较激动,模型预测控制可以和现在很火的人工智能 深度学习结合在一起),第三个例子中物理学家们用到的是机理模型。总之各种各样的模型都可以做预测,我们身边天天都在做预测,而预测不单单是预测的准就完事了,预测的目的是为了让我们更好的去决策。
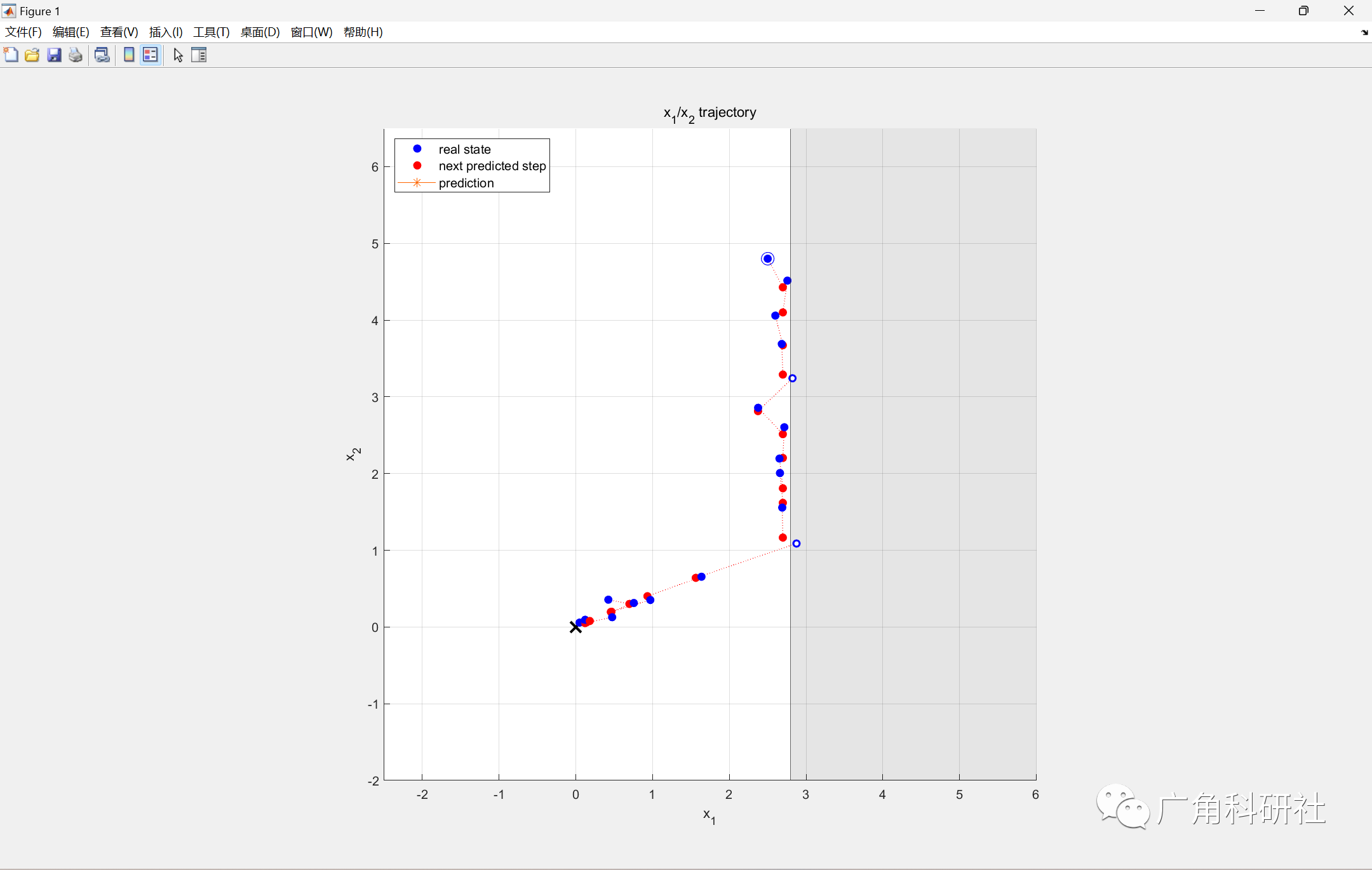
📚2 运行结果
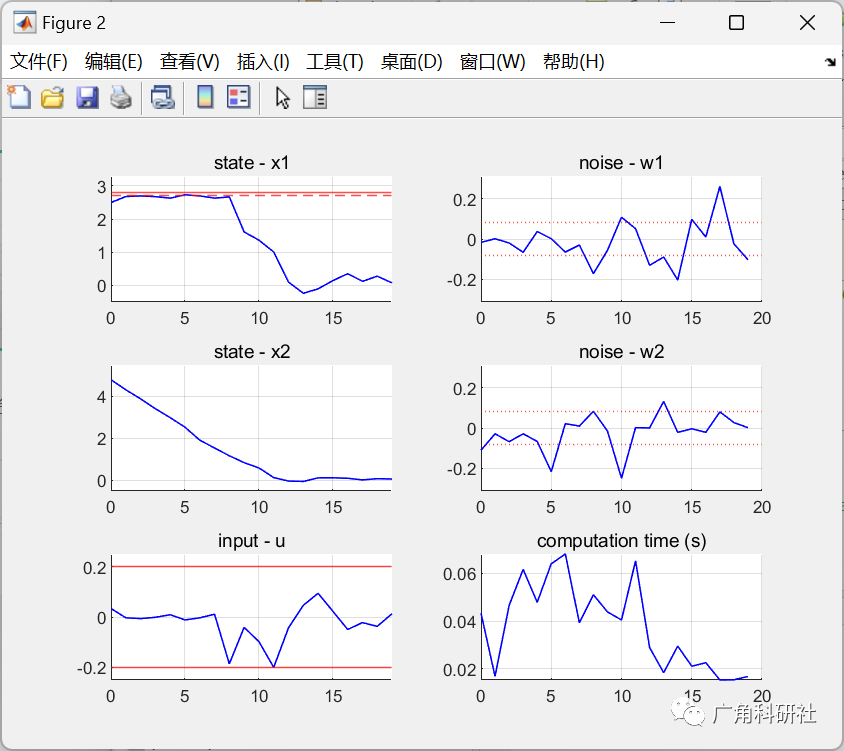
主函数部分代码:
% plot inputs and states
%% run smpc (runs new MPC simulation)
[x,u, x1_limit, sig, beta, s, comp_time]= run_mpc;
%% plot input and states
% set up figure for input and states
figure(2)
clf
plot_noise = 1; % plot noise? 0: no; 1: yes (if yes: computation time will also be plotted)
% if noise was not saved, automatically swich to 0
if exist('s','var') == 0plot_noise = 0;
end
steps = 0:length(x)-1; % get steps (last input is computed but not applied)
% state x1
if plot_noise == 0subplot(3,1,1)
elsesubplot(3,2,1)
end
hold on
title('state - x1')
grid on
plot(steps,x(:,1), 'b', 'Linewidth',0.8)
% plot constraint only if close enough
if x1_limit < 40yline(x1_limit, 'r', 'Linewidth',0.8)ylim([-0.5 x1_limit+0.5]);gamma1 = sqrt(2*[1;0]'*[sig^2 0; 0 sig^2]*[1;0])*erfinv(2*beta-1); % chance constraint addition for first predicted stepyline(x1_limit-gamma1, '
r--
', '
Linewidth
',0.8)
end
xlim([steps(1) steps(end)]);
hold off
% state x2
if plot_noise == 0subplot(3,1,2)
elsesubplot(3,2,3)
end
hold on
title('
state- x2
')
plot(steps,x(:,2), '
b
', '
Linewidth
',0.8)
grid on
ylim([-0.5 5.5]);
xlim([steps(1) steps(end)]);
hold off
% input u
if plot_noise == 0subplot(3,1,3)
elsesubplot(3,2,5)
end
K = [0.2858 -0.4910];
u_applied = [];
for i = 1:length(u)u_applied(i,1) = u(i,1) - K*[x(i,1); x(i,2)];
end
hold on
title('
input - u
')
grid on
plot(steps,u_applied(:,1), '
b
', '
Linewidth
',0.8)
yline(0.2,'
r
', '
Linewidth
',0.8)
yline(-0.2,'
r
', '
Linewidth
',0.8)
ylim([-0.25 0.25]);
xlim([steps(1) steps(end)]);
hold off
% plot noise (given seeding)
% rng(30,'
twister
'); % hardcoded seeding
rng(s); % retrieve seeding from run_mpc
w = [];
for i = 1: length(x)w(i,1) = normrnd(0,sig);w(i,2) = normrnd(0,sig);
end
🎉3 参考文献
[1]Lorenz J S,Congcong S,Gabriela C, et al. Chance-constrained stochastic MPC of Astlingen urban drainage benchmark network[J]. Control Engineering Practice,2021,115.
部分理论引用网络文献,若有侵权联系博主删除。
🌈4 Matlab代码实现及文献
相关文章:
模型预测控制(MPC)中考虑约束中的不确定性(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
校招C#面试题整理—Unity客户端
前言 博客已经1年多没有更新了,这一年主要在实习并准备秋招和春招,目前已经上岸Unity客户端岗位,现将去年校招遇到的一些面试题的事后整理分享出来。答案是笔者自己整理的不一定保证准确,欢迎大家在评论区指出。 Unity客户端岗的…...

【数字IC设计】利用Design Compiler评估动态功耗
利用DC对RTL设计的动态功耗进行评估,主要可以分为以下步骤: 用vcs编译运行testbench,生成.saif文件(Switching Activity Interchange Format)在Design Compiler编译前,读入.saif文件Design Compiler编译完设计文件后,输出功耗报告 下面通过一个计数器的设计,来演示该过程…...

Docker Compose命令讲解+文件编写
docker compose的用处是对 Docker 容器集群的快速编排。(源码) 一个 Dockerfile 可以定义一个单独的应用容器。但我们经常碰到需要多个容器相互配合来完成某项任务的情况(如实现一个 Web 项目,需要服务器、数据库、redis等&#…...
Linux bash: ipconfig: command not found解决方法
安装完centos7运行ifconfig命令发现找不到 安装相关工具 yum install net-tools.x86_64 无脑yes即可...
【面试算法——动态规划 21】正则表达式匹配(hard) 交错字符串
10. 正则表达式匹配 链接: 10. 正则表达式匹配 给你一个字符串 s 和一个字符规律 p,请你来实现一个支持 ‘.’ 和 ‘*’ 的正则表达式匹配。 ‘.’ 匹配任意单个字符 ‘*’ 匹配零个或多个前面的那一个元素 所谓匹配,是要涵盖 整个 字符串 s的…...

基于Python实现的神经网络分类MNIST数据集
神经网络分类MNIST数据集 目录 神经网络分类MNIST数据集 1 一 、问题背景 1 1.1 神经网络简介 1 前馈神经网络模型: 1 1.2 MINST 数据说明 4 1.3 TensorFlow基本概念 5 二 、实现说明 5 2.1 构建神经网络模型 5 为输入输出分配占位符 5 搭建分层的神经网络 6 处理预…...
设计模式之是简单工厂模式
分类 设计模式一般分为三大类:创建型模式、结构型模式、行为型模式。 创建型模式:用于创建对象,共五种,包括单例模式、简单工厂模式、工厂方法模式、抽象工厂模式、建造者模式、原型模式。结构型模式:用于处理类或对…...

Java应用的混淆、加密以及加壳
文章目录 前言问题代码混淆存在的问题Java类文件加密存在的问题虚拟化保护存在的问题AOT编译存在的问题 Java应用的打包混淆器类加载与类加密Bootstrap Class LoaderExtension Class LoaderSystem Class Loader自定义ClassLoaderprotector4j 加壳采用Golang打包Java程序xjar 参…...
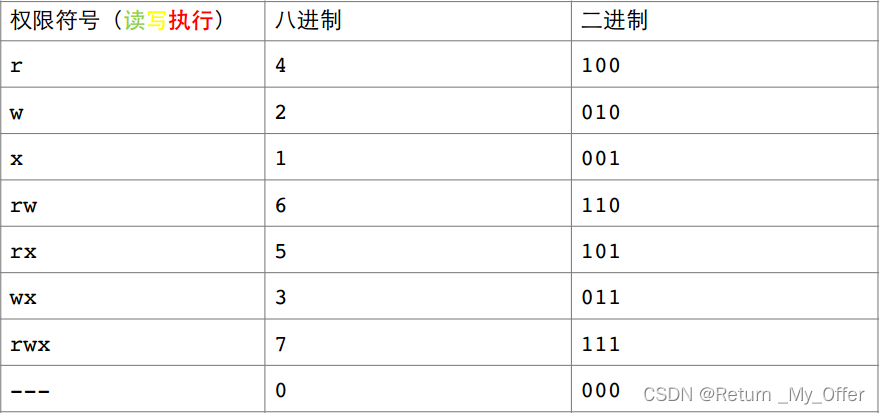
【Linux】:Linux中Shell命令及其运行原理/权限的理解
Shell命令以及运行原理 Linux严格意义上说的是一个操作系统,我们称之为“核心(kernel)“ ,但我们一般用户,不能直接使用kernel 而是通过kernel的“外壳”程序,也就是所谓的shell,来与kernel沟通…...

传统项目管理与敏捷项目管理
价值理念 首先来看看在理念方面,两者有何不同。 项目管理的铁三角是围绕着范围、成本和时间展开的。传统项目管理的特点是强计划驱动,需求范围固定下来后才可分配人员和时间,并在项目推进过程中积极跟踪和控制风险。 敏捷项目…...
只要掌握Win32应用程序错误的来龙去脉,就没必要惊慌失措
也许你遇到了一个问题,你试图运行的程序已损坏甚至丢失。在这种情况下,Windows将无法正确运行该文件,因此,操作系统将生成一个错误——文件不是有效的32位应用程序或文件不是无效的Win32应用程序。 错误通常是因为可执行文件不是有…...
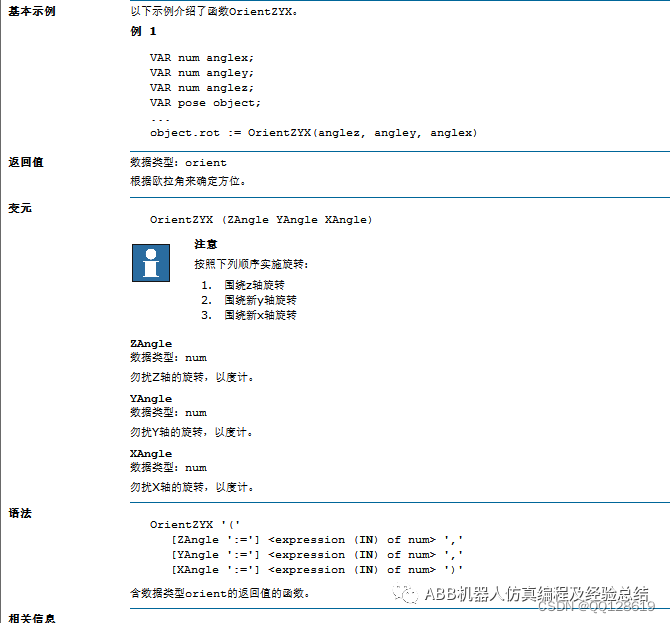
ABB机器人关于重定位移动讲解
关于机器人如何重定位移动,首先来看一下示教器上的重定位移动是在哪。 从图中所示的坐标位置和操纵杆方向得知,重定位的本质是绕X、Y、Z轴的旋转。那么实现跟摇杆一样的操作,就可以通过改变当前位置的欧拉角来实现,参考Rapid指令…...

Ceph介绍与部署
Ceph介绍与部署 一、存储基础1.1、单机存储设备1.1.1、单机存储的问题 1.2、商业存储解决方案1.3、分布式存储(软件定义的存储 SDS)1.3.1、分布式存储的类型 二、Ceph 简介三、Ceph 优势四、Ceph 架构五、Ceph 核心组件5.1、Pool中数据保存方式支持两种类…...

sklearn 机器学习基本用法
# # 科学计算模块 # import numpy as np # import pandas as pd # # 绘图模块 # import matplotlib as mpl # import matplotlib.pyplot as plt # from sklearn.linear_model import LinearRegression # from sklearn import datasets # from sklearn.model_selection import t…...

Ionic4 生命周期钩子函数和angular生命周期钩子函数介绍
1、Ionic4 生命周期钩子函数 Ionic 4(以及之后的 Ionic 版本)使用了 Angular 生命周期钩子,因为 Ionic 是基于 Angular 构建的。因此,Ionic 4 中的生命周期与 Angular 组件生命周期非常相似。以下是一些常见的 Ionic 4 生命周期钩…...

Hive+Flume+Kafka章节测试六错题总结
题目2: EXTERNAL关键字的作用?[多选] A、EXTERNAL关键字可以让用户创建一个外部表 B、创建外部表时,可以不加EXTERNAL关键字 C、通过EXTERNAL创建的外部表只删除元数据,不删除数据 D、不加EXTERNAL的时候,默认创建内…...

【随笔】论多线程CPU离线渲染器的实现:A CPU BASED OFFLINE RENDERING ENGINE
前言 小熊挺喜欢玩游戏的,对于游戏画面有所追求,记得高中第一次玩战地的时候,惊叹于画面细腻的表现,并且还能开坦克车,这样的事情深深吸引了我。我是一个画面党,为了追求更好的画质表现我开始研究设置面板…...

多输入多输出 | MATLAB实现CNN-GRU-Attention卷积神经网络-门控循环单元结合SE注意力机制的多输入多输出预测
多输入多输出 | MATLAB实现CNN-GRU-Attention卷积神经网络-门控循环单元结合SE注意力机制的多输入多输出预测 目录 多输入多输出 | MATLAB实现CNN-GRU-Attention卷积神经网络-门控循环单元结合SE注意力机制的多输入多输出预测预测效果基本介绍程序设计往期精彩参考资料 预测效果…...
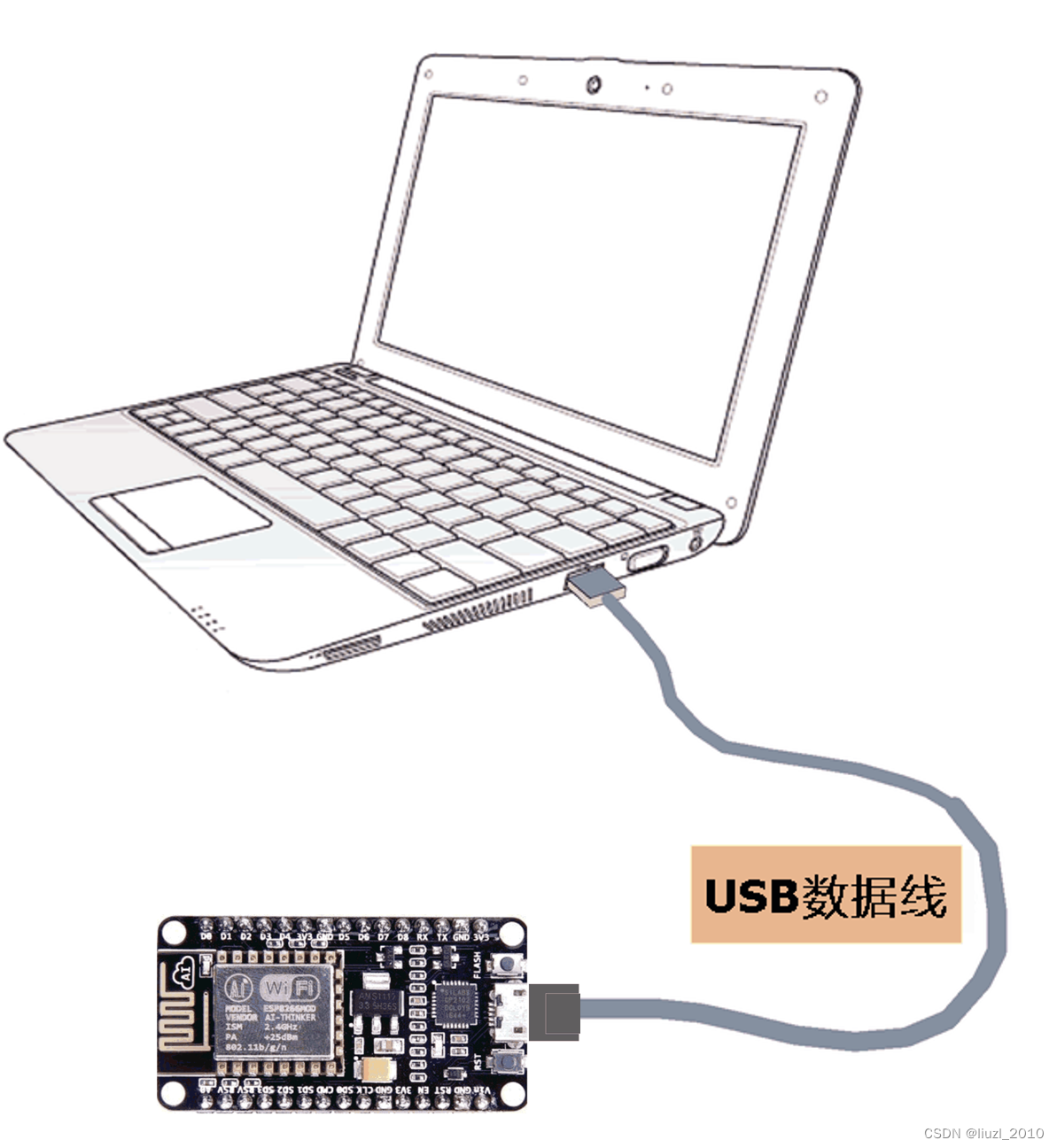
Ubuntu:Arduino IDE 开发环境配置【保姆级】
物联网开发学习笔记——目录索引 本章主要介绍在Ubuntu系统搭建Arduino IDE 开发环境,windows系统请移步:Windows:Arduino IDE 开发环境配置【保姆级】 参考官网:Arduino - Home 有关更多详细信息,请参阅 Arduino I…...
)
STM32F407的RTC时钟不准?手把手教你用CubeMX配置LSE晶振校准(附源码)
STM32F407的RTC时钟不准?手把手教你用CubeMX配置LSE晶振校准(附源码) 在嵌入式系统开发中,实时时钟(RTC)的精度问题常常让开发者头疼。特别是使用STM32F407这类主流单片机时,即使按照官方文档配…...
)
FPGA新手避坑指南:用Xilinx MIG IP核驱动DDR3内存的完整配置流程(以MT41J256M16为例)
FPGA新手避坑指南:Xilinx MIG IP核驱动DDR3内存的完整配置流程(以MT41J256M16为例) 第一次接触FPGA与DDR3接口设计时,面对密密麻麻的芯片手册和复杂的IP核配置界面,很多工程师都会感到无从下手。本文将手把手带你完成从…...

FPGA时序约束实战:Set_Clock_Sense的精准控制与路径优化
1. 为什么需要Set_Clock_Sense约束 在FPGA设计中,时钟网络就像城市交通系统中的红绿灯,控制着数据在各个寄存器之间的流动节奏。但实际工程中经常会遇到一些特殊场景:比如一个多路选择器(MUX)同时接收多个时钟源&#…...

Go语言中的Interface:面向接口编程
Go语言中的Interface:面向接口编程 1. Interface的基本概念 Interface是Go语言中用于定义行为的一种类型,它指定了一组方法签名,但不提供具体实现。Interface是Go语言实现多态和解耦的核心机制,也是面向接口编程的基础。 Go语言的…...
”问题全面解析与修复指南)
Virtualbox “Kernel driver not installed (rc=-1908)”问题全面解析与修复指南
1. 遇到Virtualbox "Kernel driver not installed (rc-1908)"错误怎么办? 最近在Ubuntu系统上更新后,突然发现Virtualbox无法正常启动虚拟机了,屏幕上赫然显示着"Kernel driver not installed (rc-1908)"的错误提示。作为…...

实战工业测控:基于快马AI生成LabVIEW与数据库、Web集成的监控系统
今天想和大家分享一个最近用LabVIEW实现的工业测控项目实战经验。这个项目是为某制造车间设计的生产线监控系统,主要实现了设备数据采集、存储和可视化展示的全流程。下面我会分步骤详细介绍实现过程。 数据采集模块设计 这个环节需要实时获取产线上多个设备的运行…...

拯救数字青春:GetQzonehistory让QQ空间记忆永久安家
拯救数字青春:GetQzonehistory让QQ空间记忆永久安家 【免费下载链接】GetQzonehistory 获取QQ空间发布的历史说说 项目地址: https://gitcode.com/GitHub_Trending/ge/GetQzonehistory 在这个信息爆炸的时代,我们的青春记忆正以数据形式储存在各大…...

AssetRipper终极指南:如何免费快速提取Unity游戏资源
AssetRipper终极指南:如何免费快速提取Unity游戏资源 【免费下载链接】AssetRipper GUI Application to work with engine assets, asset bundles, and serialized files 项目地址: https://gitcode.com/GitHub_Trending/as/AssetRipper AssetRipper是一款强…...

别再手动点灯了!用Simulink串口实时控制STM32,5分钟搞定双向通信
基于Simulink与STM32的实时双向通信实战指南 在嵌入式系统开发中,快速原型验证是提升效率的关键环节。传统开发模式下,工程师需要花费大量时间编写底层通信协议、调试硬件接口,而真正核心的控制算法验证反而被边缘化。本文将介绍一种高效开发…...

Bidili Generator实操演示:LoRA权重强度与CFG Scale协同调优黄金组合
Bidili Generator实操演示:LoRA权重强度与CFG Scale协同调优黄金组合 1. 引言:当定制化风格遇上精细控制 如果你用过Stable Diffusion XL(SDXL)来生成图片,可能会遇到这样的困扰:好不容易找到一个喜欢的L…...