五. 激光雷达建图和定位方案-开源SLAM
前面内容:
一. 器件选型心得(系统设计)--1_goldqiu的博客-CSDN博客
一. 器件选型心得(系统设计)--2_goldqiu的博客-CSDN博客
二. 多传感器时间同步方案(时序闭环)--1
三. 多传感器标定方案(空间同步)--1_goldqiu的博客-CSDN博客
三. 多传感器标定方案(空间同步)--2
三. 多传感器标定方案(空间同步)--3
四. 点云着色(真彩点云)方案
五. 激光雷达建图和定位方案-引言-CSDN博客
五. 激光雷达建图和定位方案-基础概念-CSDN博客
五. 激光雷达建图和定位方案-算法工具-CSDN博客
五. 激光雷达建图和定位方案-开源SLAM
LIO-SAM
LIO-SAM的特点是紧耦合:就是将雷达观测、IMU信息拿到一起做状态估计,一起估计包括位姿6个状态变量、bias 6个状态变量、velocity 3个状态变量,一共15个状态变量
imuPreintegration节点做的事:
有两个实例化对象,生成了4个线程(4个回调函数);
TransformFusion中:订阅通过imu估计的雷达里程计信息(后面都称为imu里程计信息),订阅最终优化后的里程计数据(没有增量插值)
TransformFusion这个类产生的数据没有被其它节点使用,只是单纯的为了rviz显示用,所以这个类可以去掉,不影响最后的建图结果
IMUPreintegration中:订阅IMU数据和最终优化后的里程计增量数据,进行因子图优化,估计IMU的bias,输出imu估计的雷达里程计信息(后面都称为imu里程计信息)
这里进行滑窗边缘化的操作是设置一个key变量来记录优化的因子的个数,当超过一定数量后进行边缘化,重置优化器和因子图
imageProjection节点做的事:
只有一个实例化对象,生成了3个线程(3个回调函数)
imageProjection中:订阅雷达数据、IMU数据、IMU里程计数据;获得初始位姿,进行点云去畸变(利用IMU对点云进行去畸变)和投影点云,生成一个自定义消息类型的点云数据(有序点云,有垂直和水平线序)。
featureExtraction节点做的事:
只有一个实例化对象,生成了1个线程(1个回调函数)
FeatureExtraction中:订阅自定义消息类型的有序点云信息,进行了角点和面点的特征提取,发出自定义消息类型的有序特征点云信息。
mapOptmization节点做的事:
有1个实例化对象,生成了3个线程(3个回调函数)
另外有两个线程,一个用于回环检测、一个用于全局地图显示
mapOptmization中:订阅回环、GNSS、自定义点云特征信息;进行点云的配准,将雷达里程计、回环检测、GNSS因子加入因子图进行优化;发布优化后的雷达里程计,包括增量的;发布地图等相关信息。
如何进行回环检测的?
构建关键帧,将关键帧的位姿存储。以固定频率进行回环检测。每次处理最新的关键帧,通过kdtree寻找历史关键帧中距离和时间满足条件的一个关键帧。然后就认为形成了回环。
形成回环后,历史帧周围25帧,构建局部地图,与当前关键帧进行icp匹配求解位姿变换。
lio-sam 认为里程计累计漂移比较小,所以通过距离与时间这两个概念进行的关键帧的回环检测。
FAST-LIO2
Fast-Lio 采用迭代误差状态卡尔曼滤波(iESKF)来实现紧耦合的 LIO。在滤波器的设计上,Fast-Lio 和 LINS 大体相同,但在卡尔曼增益的计算部分有所区别。众所周知,计算卡尔曼增益时需要对观测对误差状态的雅可比矩阵与自身转置的乘积求逆,当观测的维度较大时求逆将变得耗时,比如有 1000 个点时就需要对 (1000×6)*(1000×6)大小的矩阵求逆。针对此问题,Fast-Lio 采用的新的卡尔曼增益计算方法,需要求逆的矩阵的规模仅与状态量的规模相关,而非观测的规模。
Fast-Lio 兼容旋转式机械激光雷达和 Livox 固态激光雷达,首先对点云做特征提取,并用 IMU递推对特征点做去畸变,然后将激光观测和 IMU预测放到 iESKF 中估计当前时刻的 Position、Velocity、Orientation、Bias 和 Gravity 18维度状态量,所有这些状态量都是位于世界坐标系下的。
Fast-Lio2 相比于 Fast-Lio 使用了增量式的 ikd-Tree 数据结构(五. 激光雷达建图和定位方案-算法工具-CSDN博客)维护 local map,有效降低了对激光点观测查询近邻的耗时,进一步提升了效率;此外,不再提取特征点,所有的点都根据点到面的方式寻找关联;而在其他算法部分,两者差别不大。
相关文章:

五. 激光雷达建图和定位方案-开源SLAM
前面内容: 一. 器件选型心得(系统设计)--1_goldqiu的博客-CSDN博客 一. 器件选型心得(系统设计)--2_goldqiu的博客-CSDN博客 二. 多传感器时间同步方案(时序闭环)--1 三. 多传感器标定方案&a…...
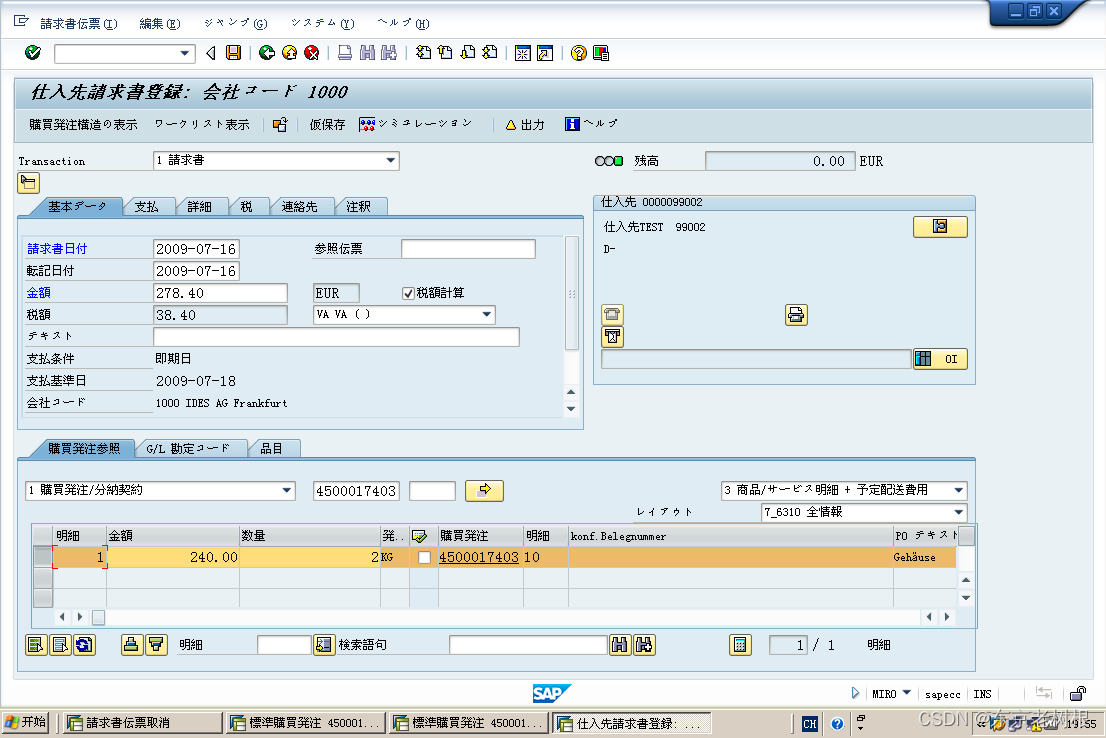
SAP MM学习笔记37 - 请求书照合中的 追加请求/追加Credit 等概念/ 请求书的取消
有关请求书照合,之前学习了一部分,现在再来学其中的一些概念。 其实这些概念也许并不常用,但是你又不能不知道,因为客户会问。 有关请求书,贴一些以前学习的文章,以方便阅读。 SAP MM学习笔记33 - 请求书…...

【C#】Winform实现轮播图
复制后,需要修改的代码: 1、图片文件夹路劲:string folderPath "C:\\Users\\Administrator\\Desktop\\images"; 2、项目命名空间:namespace BuildAction 全窗口代码: using System; using System.Colle…...
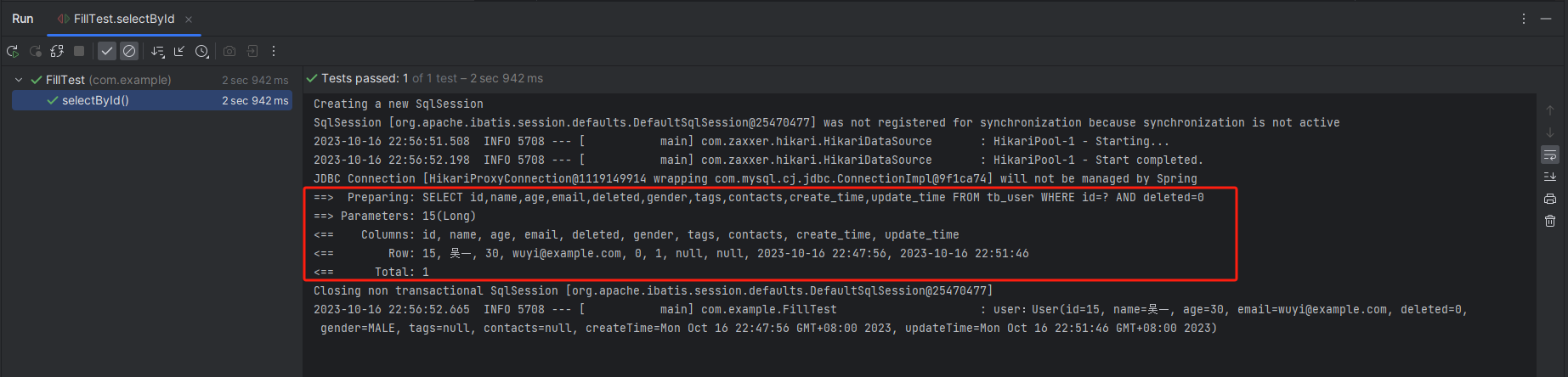
MyBatisPlus(十九)自动填充
说明 自动填充指的是,当数据被 插入 或者 更新 的时候,会为指定字段进行一些默认的数据填充。 比如,插入时,会自动填充数据的创建时间和更新时间;更新时,会自动填充数据的更新时间。 实现方式 配置处理器…...
设计模式_命令模式
命令模式 介绍 定义案例问题堆积在哪里解决办法 行为形设计模式 就是把 “发布命令 执行命令”细化为多个角色 每个角色又能继续细化 发布命令 1 打印1-9 a 打印A-G 如果有更多的命令 命令处理方式更加多样性 更复杂 处理命令的顺序拆分角色:降低耦合度 命令类&am…...
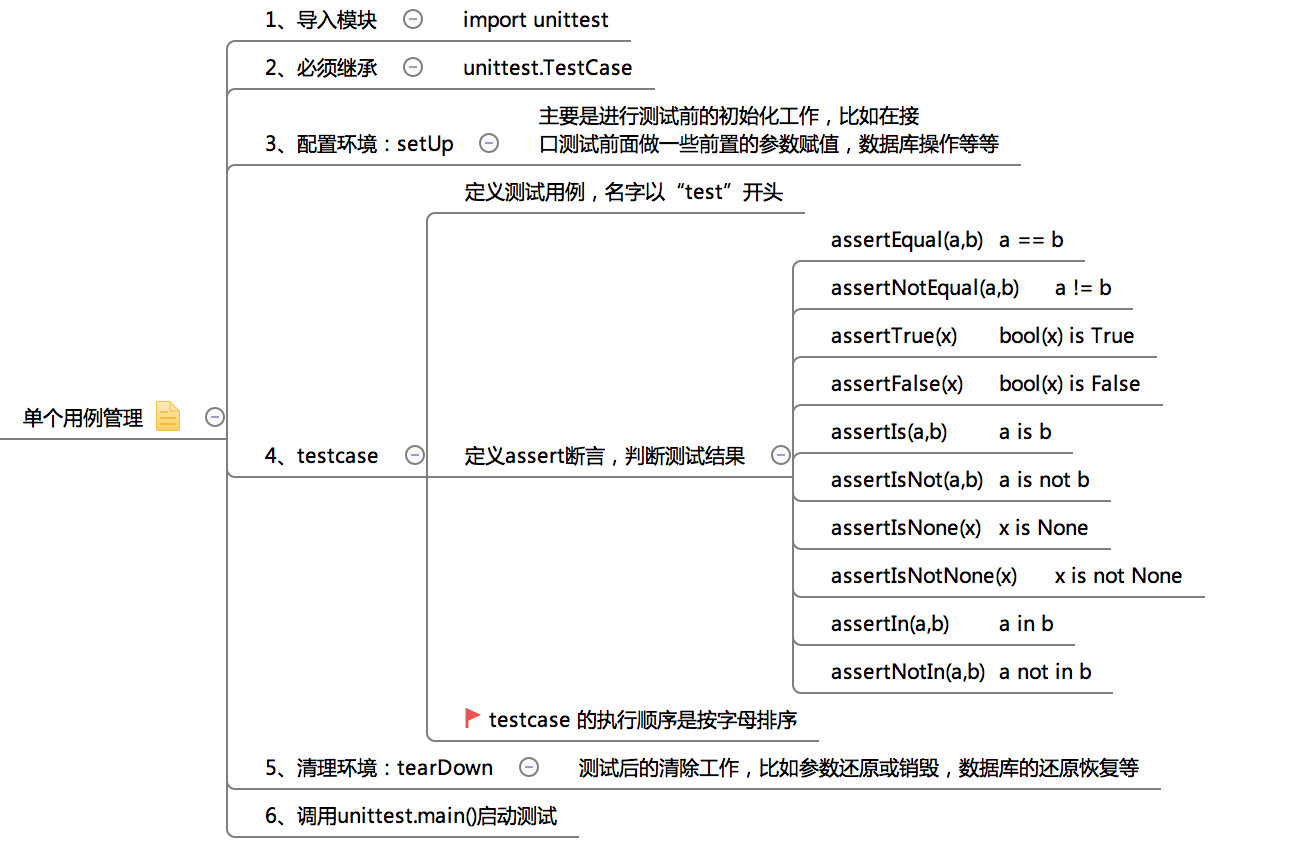
python接口自动化测试(六)-unittest-单个用例管理
前面五节主要介绍了环境搭建和requests库的使用,可以使用这些进行接口请求的发送。但是如何管理接口案例?返回结果如何自动校验?这些内容光靠上面五节是不行的,因此从本节开始我们引入python单元测试框架 unittest,用它…...

tomcat 服务器
tomcat 服务器 tomcat: 是一个开源的web应用服务器。区别nginx,nginx主要处理静态页面,那么动态请求(连接数据库,动态页面)并不是nginx的长处,动态的请求会交给tomcat进行处理。 nginx-----转发动态请求-…...

如果你有一次自驾游的机会,你会如何准备?
常常想来一次说走就走的自驾游,但是光是想想就觉得麻烦的事情好多:漫长的公路缺少娱乐方式、偏僻拗口的景点地名难以导航、不熟悉的城市和道路容易违章…… 也因为如此,让我发现了HUAWEI HiCar这个驾驶人的宝藏! 用HUAWEI HiCar…...
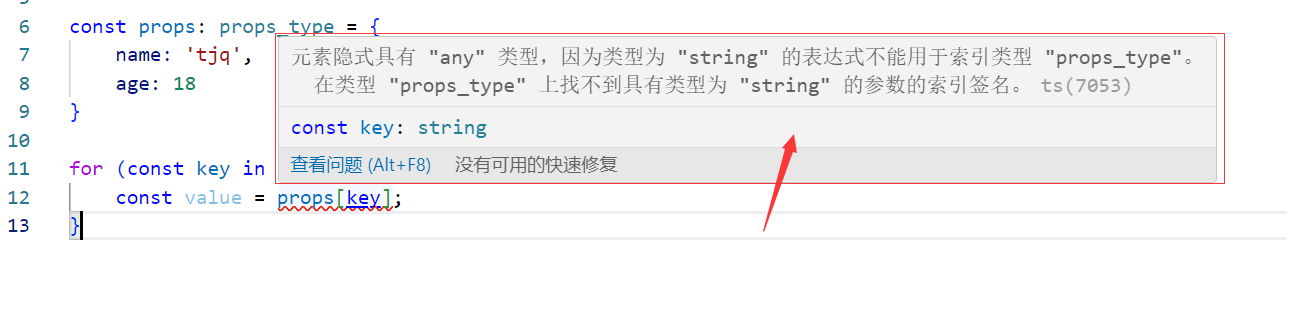
关于ts的keyof
type props_type {name: string,age: number }const props: props_type {name: tjq,age: 18 }for (const key in props) { //props[key]出现红色波浪线const value props[key]; }why? 经过我查阅多方资料,在网上看到一个比较合适的例子 地址…...

Go实现CORS(跨域)
引言 很多时候,需要允许Web应用程序在不同域之间(跨域)实现共享资源。本文将简介跨域、CORS的概念,以及如何在Golang中如何实现CORS。 什么是跨域 如果两个 URL 的协议、端口(如果有指定的话)和主机都相…...

第一章:变量和简单的数据类型
第一节 变量 variable(变量),每个变量指向一个值————与该变量相关联的信息 message"hello python world!" print(message) 1.1变量的命名和使用 1.变量名只能包含数字(0~9)、字母(Aa~Zz)和下划线(_)。变量可以使用字母和下划线作为开头,…...

【初识Linux】:常见指令(2)
朋友们、伙计们,我们又见面了,本期来给大家解读一下有关Linux的基础知识点,如果看完之后对你有一定的启发,那么请留下你的三连,祝大家心想事成! C 语 言 专 栏:C语言:从入门到精通 数…...
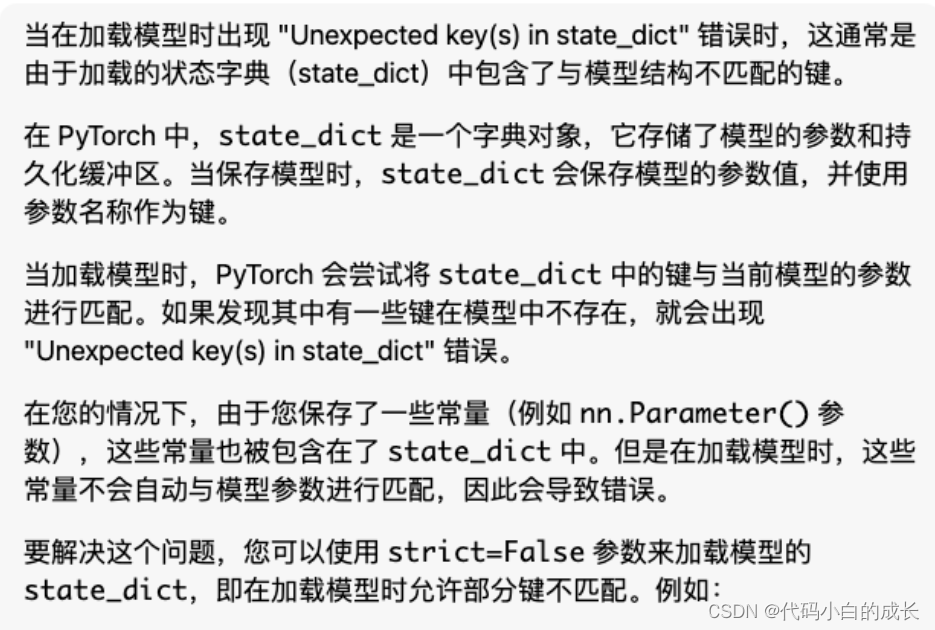
“torch.load“中出现的“Unexpected key(s) in state_dict“报错问题
问题: 解决: 添加strictFalse,允许加载过程中出现不匹配的键。但请注意,仍然需要确保模型中的主要参数能够正确加载,以确保模型的有效性。 model.load_state_dict(state_dict) # 改为: model.load_state_dict(state…...

使用dasviewer加载osgb模型,不显示纹理,黑乎乎的怎么解决?
答:查看一下是不是点到快捷键切换成无纹理模式了。 DasViewer是由大势智慧自主研发的免费的实景三维模型浏览器,采用多细节层次模型逐步自适应加载技术,让用户在极低的电脑配置下,也能流畅的加载较大规模实景三维模型,提供方便快捷的数据浏览操作。#DasViewer##实景…...

Qtday01(qt简介、简单窗口组件)
今日任务 仿qq登录界面,QT实现 代码: 头文件: #ifndef MAINWINDOW_H #define MAINWINDOW_H#include <QMainWindow> #include <QLineEdit> #include <QLabel> #include <QPushButton> #include <QtDebug> #…...
】41 - SA8295所有镜像位置、拷贝脚本、生成QFIL包 及 Fastboot 下载命令介绍)
【SA8295P 源码分析 (一)】41 - SA8295所有镜像位置、拷贝脚本、生成QFIL包 及 Fastboot 下载命令介绍
【SA8295P 源码分析】41 - SA8295所有镜像位置、拷贝脚本、生成QFIL包 及 Fastboot 下载命令介绍 一、SA8295 各镜像位置二、SA8295 QNX 侧镜像拷贝脚本三、SA8295 Android 侧镜像拷贝脚本四、使用QFIL 下载整包五、Fastboot 下载命令整理系列文章汇总见:《【SA8295P 源码分析…...

AtCoder abc130
F题提交了无数遍,最后发现是三分求解的写法错了 C - Rectangle Cutting 盲猜都在xy的中心点时可以无限分割,否则不能 D - Enough Array 前缀和二分求位置 E - Common Subsequence 公共子序列求有几种组合 设 d p [ i ] [ j ] dp[i][j] dp[i][j]代表s取到…...
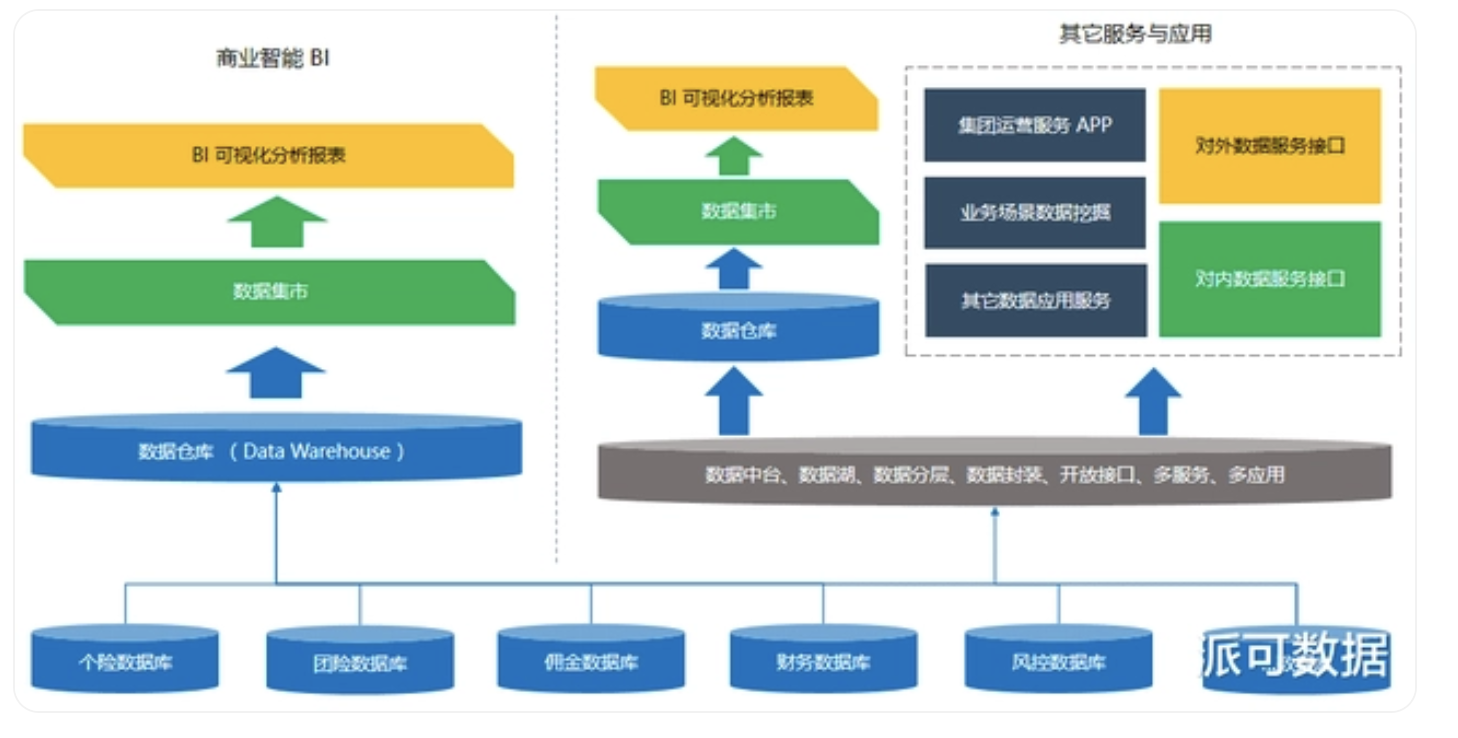
数据库、数据中台、数据仓库、数据湖区别
数据时代,各行业的企业都已经开始通过数据库来沉淀数据,但是真的论起数据库、数据仓库、数据中台,还是新出现的数据湖,它们的概念和区别,可能知道的人就比较少了,今天我们详细来比较了解一下。 一、数据仓…...

缺失的数据范围,思维,hduoj
Problem Description 著名出题人小Q出过非常多的题目,在这个漫长的过程中他发现,确定题目的数据范围是非常痛苦的一件事。 每当思考完一道题目的时间效率,小Q就需要结合时限以及评测机配置来设置合理的数据范围。 因为确定数据范围是一件痛苦…...
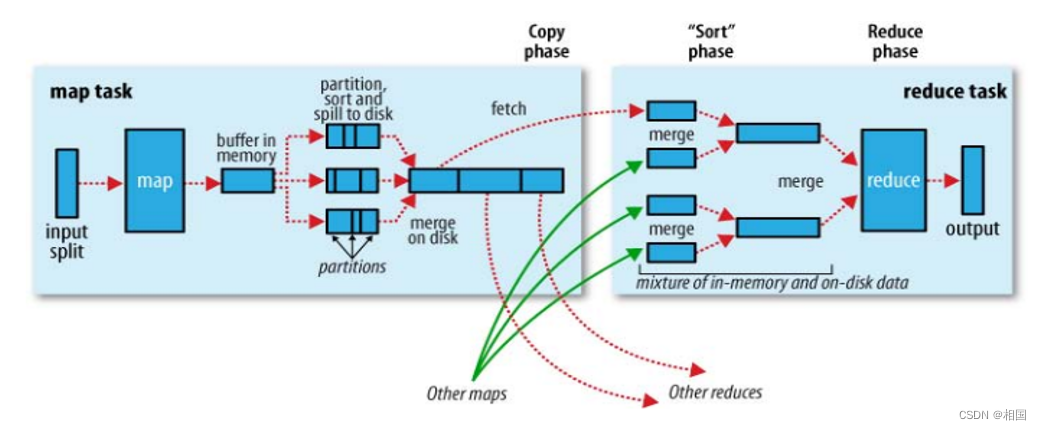
极简的MapReduce实现
目录 1. MapReduce概述 2. 极简MapReduce内存版 3. 复杂MapReduce磁盘版 4. MapReduce思想的总结 1. MapReduce概述 以前写过一篇 MapReduce思想 ,这次再深入一点,简单实现一把单机内存的。MapReduce就是把它理解成高阶函数,需要传入map和…...

Input Overlay 完整指南:实时显示键盘、游戏手柄和鼠标输入的终极工具
Input Overlay 完整指南:实时显示键盘、游戏手柄和鼠标输入的终极工具 【免费下载链接】input-overlay Show keyboard, gamepad and mouse input on stream 项目地址: https://gitcode.com/gh_mirrors/in/input-overlay Input Overlay 是一款功能强大的开源输…...

别再重复造轮子!用PADS自带转换器+立创EDA,5分钟搞定原理图符号同步
高效复用立创EDA资源:PADS原理图符号同步实战指南 在硬件设计领域,重复绘制原理图符号堪称工程师的"时间黑洞"。当你在立创EDA上发现完美的元器件模型时,为何还要在PADS中从零开始?本文将揭示一套被多数人忽视的PADS原生…...

告别音频调试噩梦:AP-0316 DSP语音处理模组全解析与实战选型
在嵌入式产品开发中,语音处理往往是考验硬件工程师耐心的“深水区”。无论是智能门禁的对讲系统,还是会议终端的免提通话,只要涉及到麦克风阵列、回声消除(AEC)和环境降噪(ENC),往往…...

STM32F429实时IIR滤波避坑指南:arm_biquad_cascade_df1_f32的群延迟与状态缓存管理
STM32F429实时IIR滤波工程实践:群延迟补偿与状态缓存优化策略 在嵌入式信号处理领域,实时滤波是许多应用的核心需求。当我们在STM32F429平台上使用arm_biquad_cascade_df1_f32函数实现IIR滤波时,会遇到两个关键挑战:群延迟对实时性…...
)
告别高斯模糊!用OpenCV+Python手把手实现引导滤波,保留图像边缘细节(附完整代码)
边缘保持滤波新选择:OpenCV与Python实现引导滤波实战指南 在数字图像处理领域,平滑滤波与边缘保持一直是一对难以调和的矛盾。传统的高斯滤波虽然能有效去除噪声,却常常以牺牲图像细节为代价;双边滤波虽然在一定程度上解决了边缘保…...

在VS Code中结合Taotoken API快速构建代码辅助工具
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在VS Code中结合Taotoken API快速构建代码辅助工具 对于希望提升编码效率的开发者而言,将AI能力深度集成到日常开发环境…...

抓包科普小知识
1、什么是抓包 抓包就是将网络传输发送与接收的数据包进行截获、重发、编辑、转存等操作,通过抓包可以: 分析网络问思路就是设置一个中间人进程负责抓包,每次目标进程之间的会话都先与中间人进程通信,再进行转发。业务分析分析网…...

GitHub Desktop汉化神器:3分钟让英文界面变中文
GitHub Desktop汉化神器:3分钟让英文界面变中文 【免费下载链接】GitHubDesktop2Chinese GithubDesktop语言本地化(汉化)工具 【GitHub桌面客户端中文汉化】 项目地址: https://gitcode.com/gh_mirrors/gi/GitHubDesktop2Chinese 还在为GitHub Desktop的英文…...
)
JS 异步 从零讲(大白话 + 真实场景 + 可运行案例)
按顺序:回调函数 → Promise → async/await,工作最常用,直接上手。1. 回调函数(最原始,缺点:回调地狱)2. Promise(解决回调地狱,链式调用)new Promise((reso…...

环保设备系统控制柜制造:从工艺联动到稳定达标的完整解析
一、什么是环保设备系统控制柜制造?环保设备系统控制柜制造,是指根据废气治理、污水处理、粉尘治理、喷淋塔、活性炭吸附、催化燃烧、RTO/RCO、除尘器、风机水泵、加药系统、污泥处理、在线监测和环保设备联动控制等实际需求,对PLC、变频器、…...