机器人制作开源方案 | 行星探测车概述
1. 功能描述
行星探测车(Planetary Rover)是一种用于进行科学探索和勘测任务的无人车辆,它们被设计成能够适应各种复杂的地形条件和极端环境,以便收集数据、拍摄照片、采集样本等。行星探测车通常包含以下主要组件和功能:
① 底盘和轮子系统:底盘提供了行星探测车的支撑结构,轮子系统使其能够移动。轮子通常采用特殊设计,以适应不同地质条件和障碍物,并提供良好的牵引力和稳定性。
② 动力系统:行星探测车通常由电池或太阳能电池板供电,这些能源会驱动电动机,使车辆能够移动和执行其它任务。
③ 导航与控制系统:导航和控制系统帮助行星探测车感知周围的环境并自主导航,它们通常包括惯性测量单元(IMU)、陀螺仪、加速度、摄像头、激光雷达、GPS等传感器。
④ 通信系统:行星探测车需要进行通信以接收指令和发送数据,通常会使用无线电通信设备实现远距离通信。
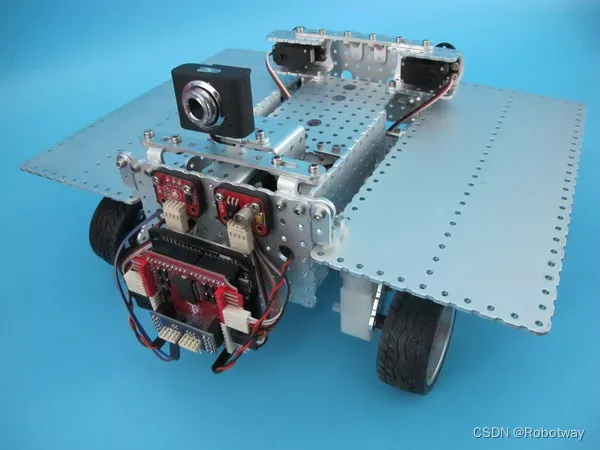
本文示例将实现R261样机行星探测车在行进过程中避障,并且当光强传感器触发时实现太阳翼展开的功能。

2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| 传感器 | 光强传感器 |
| 近红外传感器 | |
| 电池 | 7.4V锂电池 |
电路连接图如下所示:
3. 功能实现
编程环境:Arduino 1.8.19
下面提供一个实现行星探测车在行进过程中避障,并且当光强传感器触发时实现太阳翼展开功能的参考程序(sketch_sep12a.ino):
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-09-21 https://www.robotway.com/------------------------------*/#include <Servo.h>Servo leftSolarPanel; // 左太阳翼舵机Servo rightSolarPanel; // 右太阳翼舵机Servo mast; // 桅杆舵机int irSensorPin = A0; // 红外传感器的引脚(根据实际连接修改)int lightSensorPin =A5; // 光强传感器的引脚(根据实际连接修改)bool irSensorTriggered = false; // 用于跟踪红外传感器触发状态void setup() {pinMode(irSensorPin, INPUT);pinMode(lightSensorPin, INPUT);leftSolarPanel.attach(4); // 左太阳翼舵机连接到数字引脚 4rightSolarPanel.attach(3); // 右太阳翼舵机连接到数字引脚 3mast.attach(7); // 桅杆舵机连接到数字引脚 7}void loop() {// 读取红外传感器状态int irSensorValue = digitalRead(irSensorPin);// 如果红外传感器触发,小车后退并左转if (irSensorValue == HIGH && !irSensorTriggered) {irSensorTriggered = true;moveBackward();leftTurn();} else if (irSensorValue == HIGH && irSensorTriggered) {irSensorTriggered = false;moveForward();rightTurn();} else {// 如果未触发红外传感器,停止小车运动stopCar();}// 读取光强传感器状态int lightSensorValue = analogRead(lightSensorPin);// 如果光强传感器触发,执行太阳翼和桅杆展开和闭合操作if (lightSensorValue > 500) {expandSolarPanelsAndMast();} else {stopSolarPanelsAndMast();}}// 后退void moveBackward() {digitalWrite( 5 , HIGH ); //右轮后退digitalWrite( 6 , LOW );digitalWrite( 9 , HIGH ); //左轮后退digitalWrite( 10 , LOW);}// 左转void leftTurn() {digitalWrite( 5 , HIGH );digitalWrite( 6 , LOW );digitalWrite( 9 , LOW );digitalWrite( 10 , LOW );}// 前进void moveForward() {digitalWrite( 5 , LOW ); //右轮前进digitalWrite( 6 , HIGH );digitalWrite( 9 , LOW ); //左轮前进digitalWrite( 10 , HIGH );}// 右转void rightTurn() {digitalWrite( 5 , LOW );digitalWrite( 6 , LOW );digitalWrite( 9 , HIGH );digitalWrite( 10 , LOW );}// 停止void stopCar() {analogWrite(5 , 0);analogWrite(6 , 0);analogWrite(9 , 0);analogWrite(10 , 0);}// 太阳翼和桅杆展开操作void expandSolarPanelsAndMast() {// 左太阳翼展开至180°setServoAngle(leftSolarPanel, 180);delay(500); // 暂停0.5秒// 右太阳翼展开至180°setServoAngle(rightSolarPanel, 180);delay(500); // 暂停0.5秒// 桅杆展开至90°setServoAngle(mast, 90);delay(500); // 暂停0.5秒}// 太阳翼和桅杆关闭操作void stopSolarPanelsAndMast() {// 桅杆闭合至0°setServoAngle(mast, 0);// 左太阳翼闭合至0°setServoAngle(leftSolarPanel, 0);// 右太阳翼闭合至0°setServoAngle(rightSolarPanel, 0);}// 函数用于设置舵机角度,并控制舵机旋转速度void setServoAngle(Servo servo, int targetAngle) {int currentAngle = servo.read();int step = 1; // 步进值,可根据需要调整int delayTime = 20; // 延迟时间,可根据需要调整if (targetAngle > currentAngle) {for (int angle = currentAngle; angle <= targetAngle; angle += step) {servo.write(angle);delay(delayTime);}} else if (targetAngle < currentAngle) {for (int angle = currentAngle; angle >= targetAngle; angle -= step) {servo.write(angle);delay(delayTime);}}}4. 扩展样机
本样机的底盘方案是【R255】号机构,如下图所示:
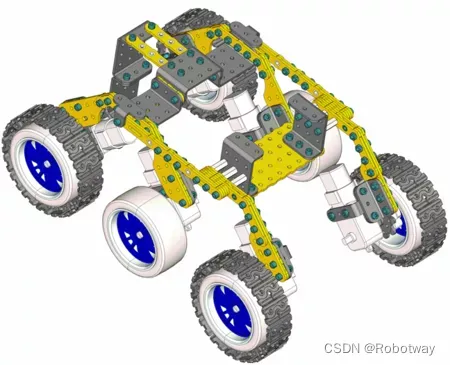
程序源代码及样机3D文件资料详见 行星探测车-概述
相关文章:
机器人制作开源方案 | 行星探测车概述
1. 功能描述 行星探测车(Planetary Rover)是一种用于进行科学探索和勘测任务的无人车辆,它们被设计成能够适应各种复杂的地形条件和极端环境,以便收集数据、拍摄照片、采集样本等。行星探测车通常包含以下主要组件和功能ÿ…...
Git基础命令
一、Git 码云创建空白仓库 什么都不选,使用代码初始化 初始化仓库:git init 配置信息:git config user.name"mashuchao" 配置信息:git config user.email"mashuchao.com" 查看配置信息:git c…...

C#中Semaphore 和 CountdownEvent 的使用总结
信号量(Semaphore),有时被称为信号灯,是在多线程环境下使用的一种设施,是可以用来保证两个或多个关键代码段不被并发调用。在进入一个关键代码段之前,线程必须获取一个信号量。一旦该关键代码段完成了,那么该线程必须释…...
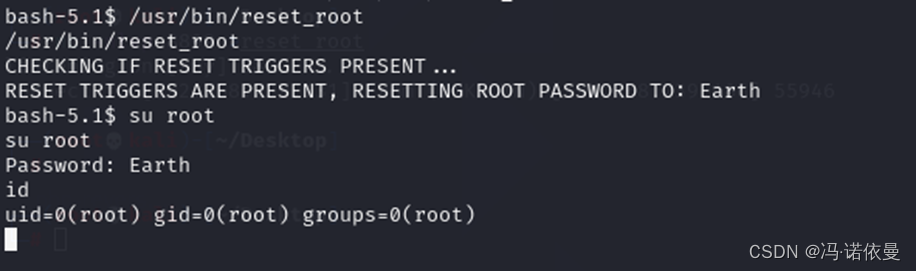
THE PLANETS:EARTH vulnhub
信息收集 netdiscover -i eth0 -r 192.168.239.0,扫描存活主机,发现目标主机 对目标主机进行端口扫描:nmap -p- -sV -O -Pn -A 192.168.239.186,发现443端口存在DNS,域名 在本地得/etc/hosts中添加域名信息 浏览…...

【随想】每日两题Day.13
题目:344. 反转字符串 编写一个函数,其作用是将输入的字符串反转过来。输入字符串以字符数组 s 的形式给出。 不要给另外的数组分配额外的空间,你必须原地修改输入数组、使用 O(1) 的额外空间解决这一问题。 示例 1: 输入&…...

CMake Cookbook
使用CMake软件对项目模块,进行构建、测试和打包。 Introduction - 《CMake菜谱(CMake Cookbook中文版)》 - 书栈网 BookStack https://github.com/dev-cafe/cmake-cookbook/tree/v1.0...
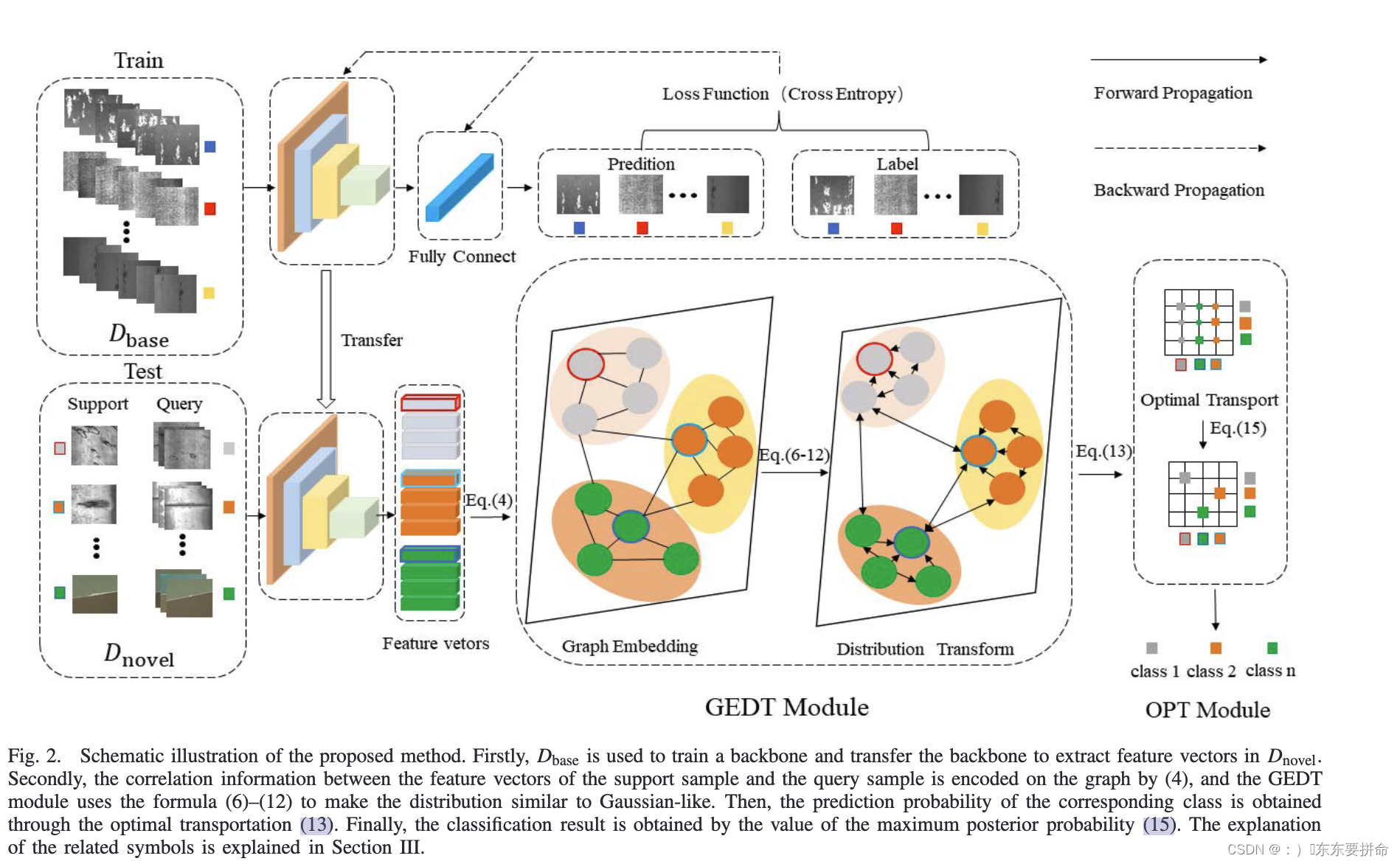
钢铁异常分类 few-shot 问题 小陈读paper 钢铁2
很清爽的 abstract 给出链接 前面的背景意义 其实 是通用的 这里替大家 整理一吓吓 1 缺陷分类在钢铁表面缺陷检测中 有 意义。 2 大多数缺陷分类模型都是基于完全监督的学习, 这需要大量带有图像标签的训练数据。 在工业场景中收集有缺陷的图像是非常困难…...

flask实战(问答平台)
问答平台项目结构搭建 先创建一个配置文件config.py,后面有些配置写在这里 #app.py from flask import Flask import configapp Flask(__name__) #绑定配置文件 app.config.from_object(config)app.route(/) def hello_world(): # put applications code herer…...

RK3568驱动模块编译进内核
一、创建文件 首先在drivers/char目录下创建hello文件夹,然后在hello文件夹下创建hello.c 文件、Kconfig和Makefile文件。 hello.c 文件内容如下 #include <linux/module.h> #include <linux/kernel.h> static int __init helloworld_init(void) …...

黑马程序员Java Web--14.综合案例--修改功能实现
一、BrandMapper包 首先,在BrandMapper包中定义用来修改的方法,和使用注解的sql语句。 BrandMapper包所在路径: package com.itheima.mapper; /**** 修改* **/Update("update tb_brand set brand_name #{brandName},company_name #{c…...
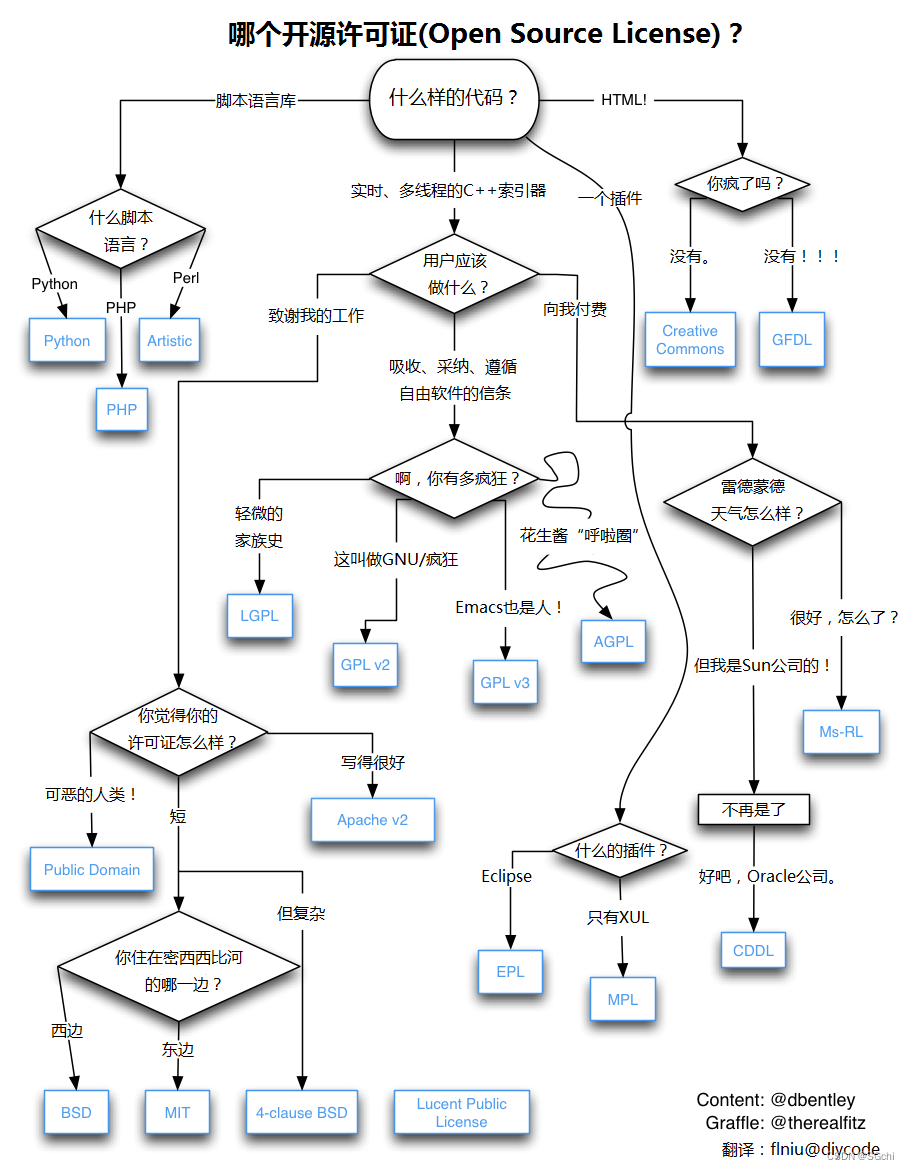
开源协议介绍
文章目录 一、简介二、常见开源协议介绍2.1 BSD (Berkeley Software Distribution license)2.2 MIT(Massachusetts Institute of Technology)2.3 Apache Licence 2.02.4 GPL(General Public License)2.5 LG…...
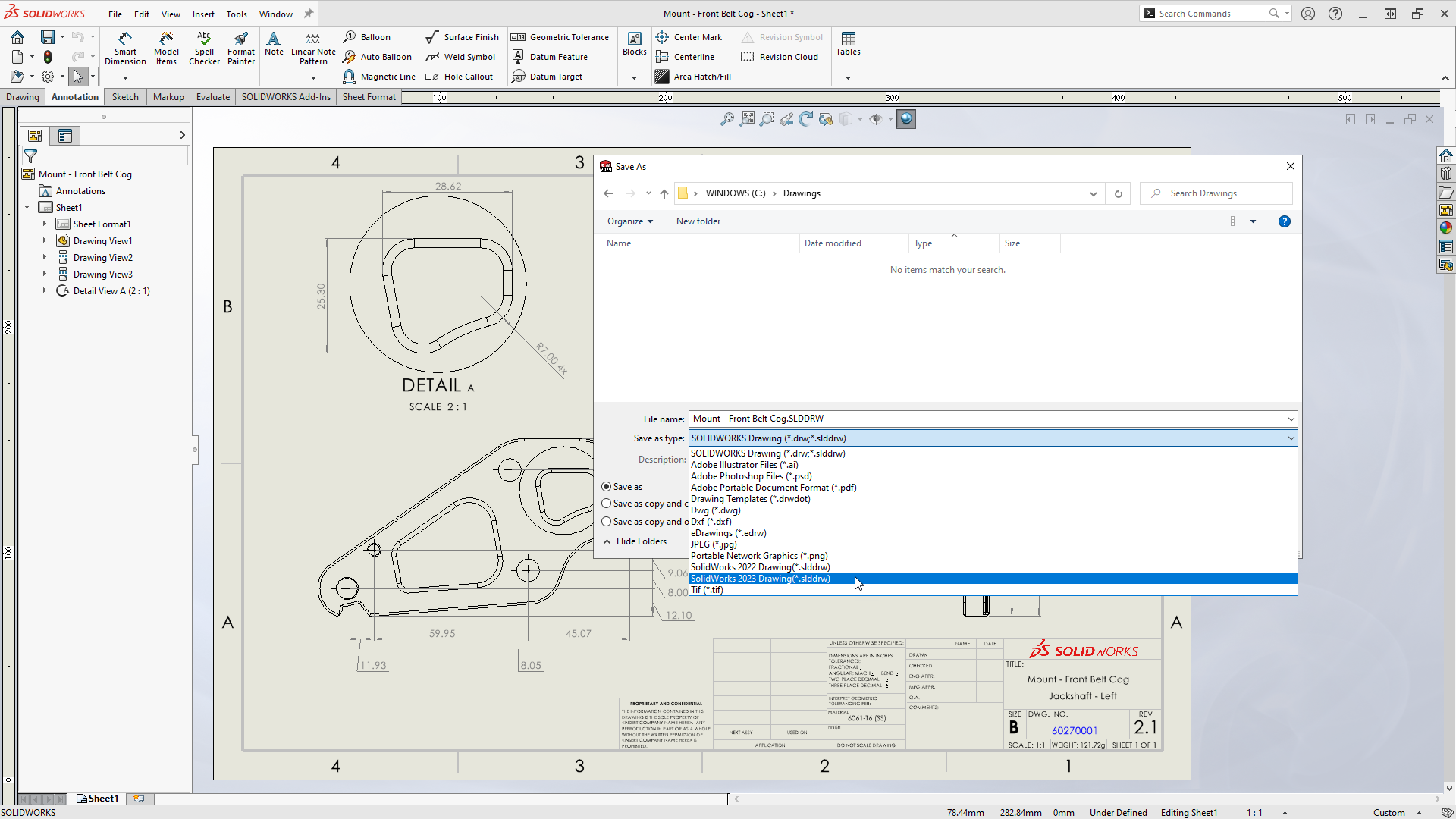
solidworks 2024新功能之-打造更加智能的工作 硕迪科技
SOLIDWORKS 2024 的新增功能 SOLIDWORKS 的每个版本都致力于改进您的工作流程,使您常用的工具尽可能快速高效地运作。此外,SOLIDWORKS 2024 可以通过量身定制的解决方案扩展您的工具集,并使您能够通过 Cloud Services 轻松将您的设计数据连接…...
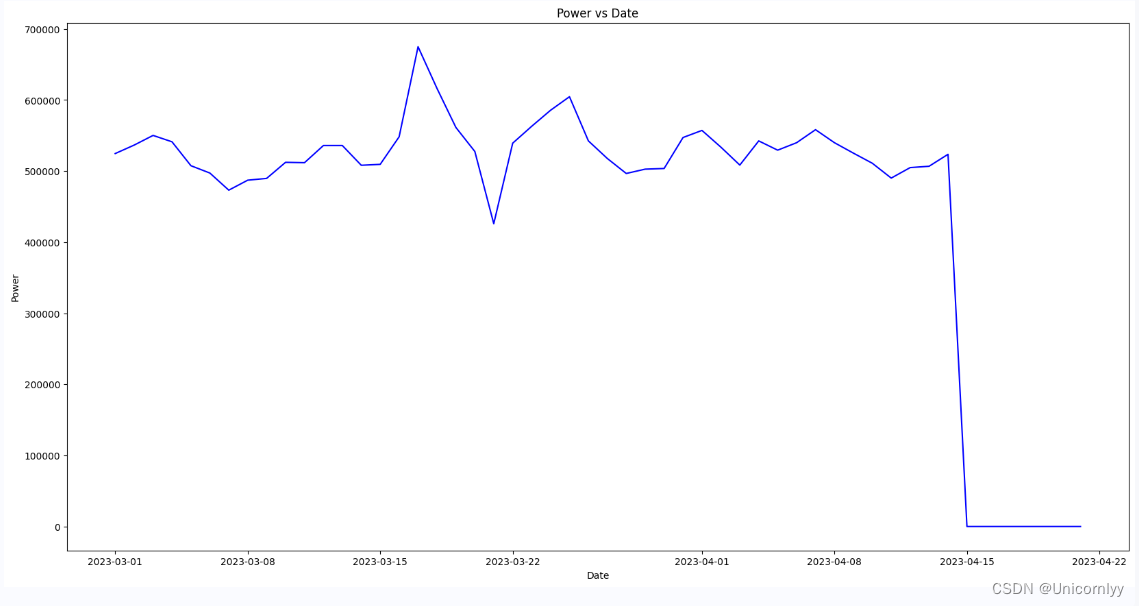
Datawhale学习笔记AI +新能源:电动汽车充电站充电量预测
赛题介绍 建立站点充电量预测模型,根据充电站的相关信息和历史电量数据,准确预测未来某段时间内充电站的充电量需求。 在赛题数据中,我们提供了电动汽车充电站的场站编号、位置信息、历史电量等基本信息。我们鼓励参赛选手在已有数据的基础上…...

记一次fineBI的增量删除更新BUG
官方文档链接是https://help.fanruan.com/finebi/doc-view-1663.html 按照官方文档,增量删除不能使用select * ,且需要指定分区建 但实际指定分区键有时候也会报错,因为表设置的字段有时候会比数据源少,此时会报错,提…...

rsync+inotify实时同步+双向同步
准备主机 192.168.1.247 (源) /home/appdata 192.168.1.248 (目的) /home/appdata 实现效果: 1.用rsync手动将192.168.1.247 的/home/appdata同步到192.168.1.248的/home/appdata目录。 2.用inotify组件实现文件的…...
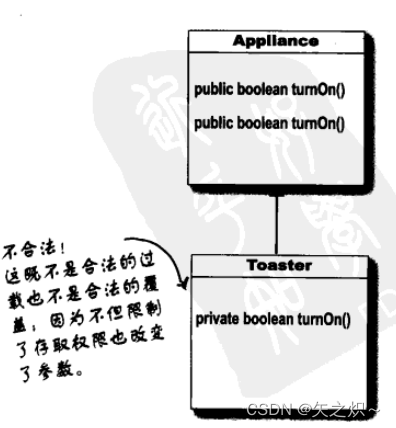
7.继承与多态 对象村的优质生活
7.1 民法亲属篇:继承(inheritance) 了解继承 在设计继承时,你会把共同的程序代码放在某个类中,然后告诉其他的类说此类是它们的父类。当某个类继承另一个类的时候,也就是子类继承自父类。以Java的方式说&…...
机器视觉、图像处理和计算机视觉:概念和区别
机器视觉、图像处理和计算机视觉:概念和区别 机器视觉、图像处理和计算机视觉是相关但有区别的概念。 机器视觉主要应用于工业领域,涉及图像感知、图像处理、控制理论和软硬件的结合,旨在实现高效的运动控制或实时操作。 图像处理是指利用…...
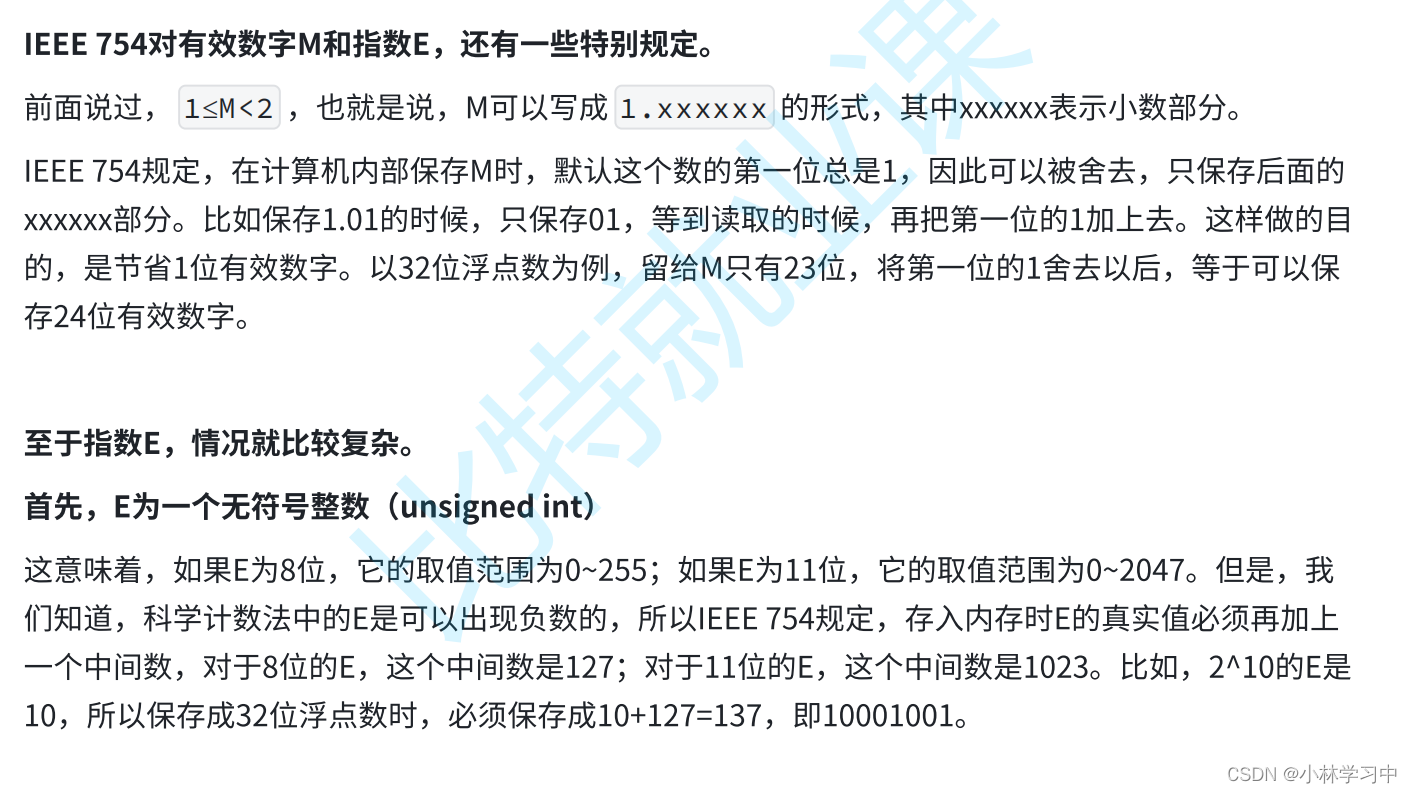
从零开始的C语言学习第二十课:数据在内存中的存储
目录 1. 整数在内存中的存储 2. 大小端字节序和字节序判断 2.1 什么是大小端? 2.2 为什么有大小端? 3. 浮点数在内存中的存储 3.1 浮点数存的过程 3.2 浮点数取的过程 1. 整数在内存中的存储 在讲解操作符的时候,我们就讲过了下⾯的内容&#x…...

分布式内存计算Spark环境部署与分布式内存计算Flink环境部署
目录 分布式内存计算Spark环境部署 1. 简介 2. 安装 2.1【node1执行】下载并解压 2.2【node1执行】修改配置文件名称 2.3【node1执行】修改配置文件,spark-env.sh 2.4 【node1执行】修改配置文件,slaves 2.5【node1执行】分发 2.6【node2、no…...

am权限系统对接笔记
文章目录 角色如何对应机构如何对应 am需要提供的接口机构、角色、人员查关系 消息的交互方式方式1 接口查询方式2 mq推送消息到业务系统 am是一套通用权限管理系统。 为什么要接入am呢? 举例,甲方有10个供方,每个供方都有单独的权限系统,不…...
)
从‘黑盒子’到清晰电路:用替代定理‘破译’未知网络N的VCR(图解+方程双解法)
从‘黑盒子’到清晰电路:用替代定理‘破译’未知网络N的VCR(图解方程双解法) 在电子工程实践中,工程师们常常会遇到一种令人头疼的"黑盒子"——那些内部结构不明、数据手册不全的电路模块。面对这样的未知网络ÿ…...

【亲测免费】 普冉PY32F002A移植FreeRTOS资源文件
普冉PY32F002A移植FreeRTOS资源文件 【下载地址】普冉PY32F002A移植FreeRTOS资源文件 本资源文件提供了将FreeRTOS V9.0移植到普冉M0芯片PY32F002A的完整示例。开发环境基于KEIL,并使用了LL库进行移植。该示例展示了如何在PY32F002A芯片上运行四个任务,并…...

herebedragons完整指南:20+种3D渲染API对比实战
herebedragons完整指南:20种3D渲染API对比实战 【免费下载链接】herebedragons A basic 3D scene implemented with various engines, frameworks or APIs. 项目地址: https://gitcode.com/gh_mirrors/he/herebedragons herebedragons是一个独特的开源项目&a…...

教你一招轻松定生物医学论文插图
写生物医学论文时,信号通路图、细胞调控机制图、病理机制图是展示研究逻辑的核心视觉语言,几乎是投稿刚需。但不少科研人都踩过绘图的坑:找不到专业的受体、离子通道、磷酸化符号等矢量图标,只能用基础形状拼凑,结果图…...

从FFT到CZT:解锁频谱细化的精准分析新维度
1. 为什么我们需要频谱细化? 在信号处理的世界里,傅里叶变换(FFT)就像是一把瑞士军刀,几乎每个工程师都会用它来分析信号的频率成分。但当你面对两个频率非常接近的信号时,FFT就显得力不从心了。我曾在一次…...
)
ElevenLabs语音克隆效果翻倍秘技(实测SSML+声纹嵌入+噪声抑制三重优化)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs语音克隆效果翻倍秘技(实测SSML声纹嵌入噪声抑制三重优化) ElevenLabs 的语音克隆能力虽强,但原始 API 调用常因语调扁平、背景干扰与韵律失真导致真实感不…...

AltSnap:重新定义Windows窗口管理效率的革命性工具
AltSnap:重新定义Windows窗口管理效率的革命性工具 【免费下载链接】AltSnap Maintained continuation of Stefan Sundins AltDrag 项目地址: https://gitcode.com/gh_mirrors/al/AltSnap 你是否曾经在Windows系统中为繁琐的窗口操作而烦恼?当需要…...

VMware Unlocker终极指南:在Windows/Linux上运行macOS虚拟机
VMware Unlocker终极指南:在Windows/Linux上运行macOS虚拟机 【免费下载链接】unlocker VMware Workstation macOS 项目地址: https://gitcode.com/gh_mirrors/unloc/unlocker 想要在Windows或Linux电脑上体验苹果macOS系统吗?无论你是开发者需要…...

数据冗余与规范化的本质[数据库原理]
我们把它想象成整理一个乱七八糟的杂物间的过程。我们的目标是把所有东西分门别类放好,让找东西、放东西、更新东西都变得轻松,并且避免重复占用空间。 第一部分:为什么要“规范化”?—— 解决“大杂烩”表的三大痛点 假设我们管…...

第一章:项目概述与环境搭建
第一章:项目概述与环境搭建 本文将带你从零开始认识 MyFirstCompose 项目,了解其整体架构与技术选型。 1.1 项目简介 MyFirstCompose 是一个基于 Jetpack Compose 开发的入门级 Android 应用,采用 单 Activity MVVM Repository 架构模式。…...