【ROS】ros-noetic和anaconda联合使用【教程】
【ROS】ros-noetic和anaconda联合使用【教程】
文章目录
- 【ROS】ros-noetic和anaconda联合使用【教程】
- 1. 安装anaconda
- 2. 创建虚拟环境
- 3. 查看python解释器路径
- 4. 在虚拟环境中使用任意的包
- 5. 创建工作空间和ros功能包进行测试
- Reference
1. 安装anaconda
在Ubuntu20.04中安装anaconda可以参考博主的这篇博客,这里就不再赘述。下面简要介绍下博主使用的环境
2. 创建虚拟环境
Anaconda基本环境管理语法如下
创建虚拟环境
conda create -n <your-virtualenv-name> python=3.8
激活虚拟环境
conda activate <your-virtualenv-name>
激活虚拟环境后使用pip install rospkg rospy catkin_tools来安装ros依赖
#in your virtual env
pip install rospkg rospy catkin_tools
3. 查看python解释器路径
笔者使用的是
ros-noetic版本,安装的anaconda3,在ros-noetic中的原生python版本为python3.8.10,如果使用的ros-melodic版本,那么原生python应该三是python2.7。
下面我们验证一下基本信息是否正确,打开一个terminal
which python3
默认的python3解释器路径是/usr/bin/python3
然后,查看anaconda虚拟环境中的python3解释器路径
conda activate <your_virtualenv_name>
which python3
比如笔者的虚拟环境名字是metaRL,查看的结果如下
4. 在虚拟环境中使用任意的包
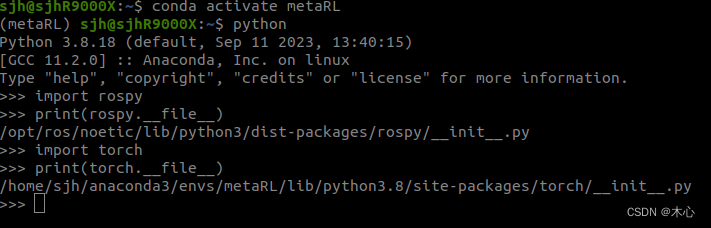
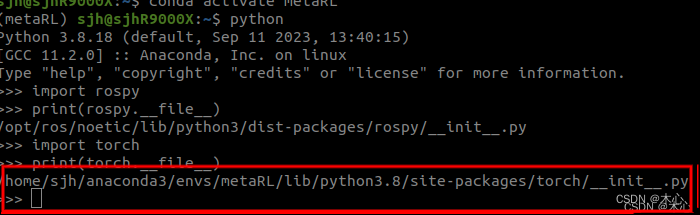
笔者在这个环境中配置了torch-v2.0.1具体教程参考这篇博客,这个所需要的包可以是任何你想使用的包。我们验证一下是否能顺利导入
conda activate <your_virtualenv_name>
python
import rospy
print(rospy.__file__)
import torch
print(torch.__file__)
如下所示,我们顺利导入了rospy和torch并且查看了其存放路径
5. 创建工作空间和ros功能包进行测试
mkdir -p ~/test_ws/src
cd ~/test_ws/src/
catkin_init_workspace
catkin_create_pkg test_ros_python std_msgs rospy
cd ..
catkin_make
echo "source ~/test_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
然后创建一个测试脚本
roscd test_ros_python
mkdir scripts
touch test_node.py
chmod +x test_node.py
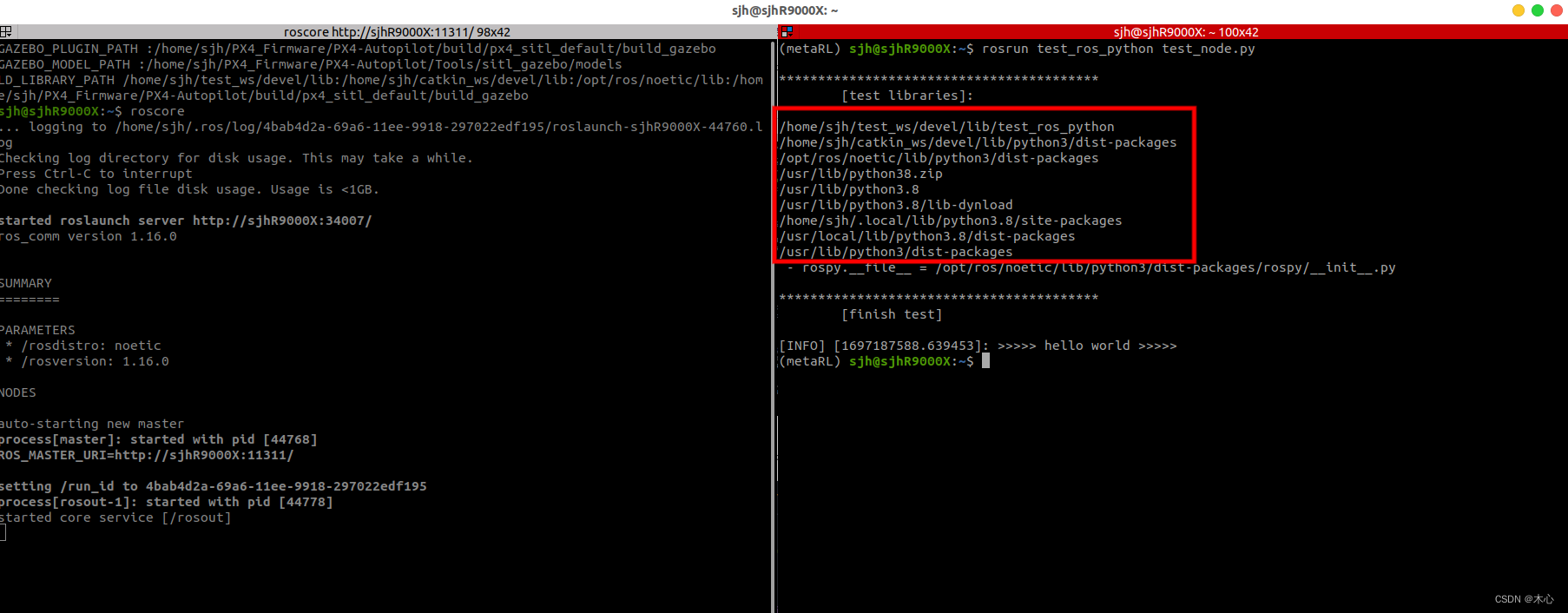
然后在test_node中编写以下内容
#! /usr/bin/env python
# coding :utf-8print('\n*****************************************\n\t[test libraries]:\n')
import rospy
import torchprint(' - rospy.__file__ = %s'%rospy.__file__)
print(' - scipy.__file__ = %s'%torch.__file__)
# check cuda is ready or not
print('cuda is {}'.format('ready' if torch.cuda.is_available() else 'not ready'))
print('\n*****************************************\n\t[finish test]\n')if __name__ == "__main__":rospy.init_node('test_node', anonymous=True)rospy.loginfo('>>>>> hello world >>>>>')
这样进行测试之后发现,并不能顺利导入我所需要的torch包,如下图所示
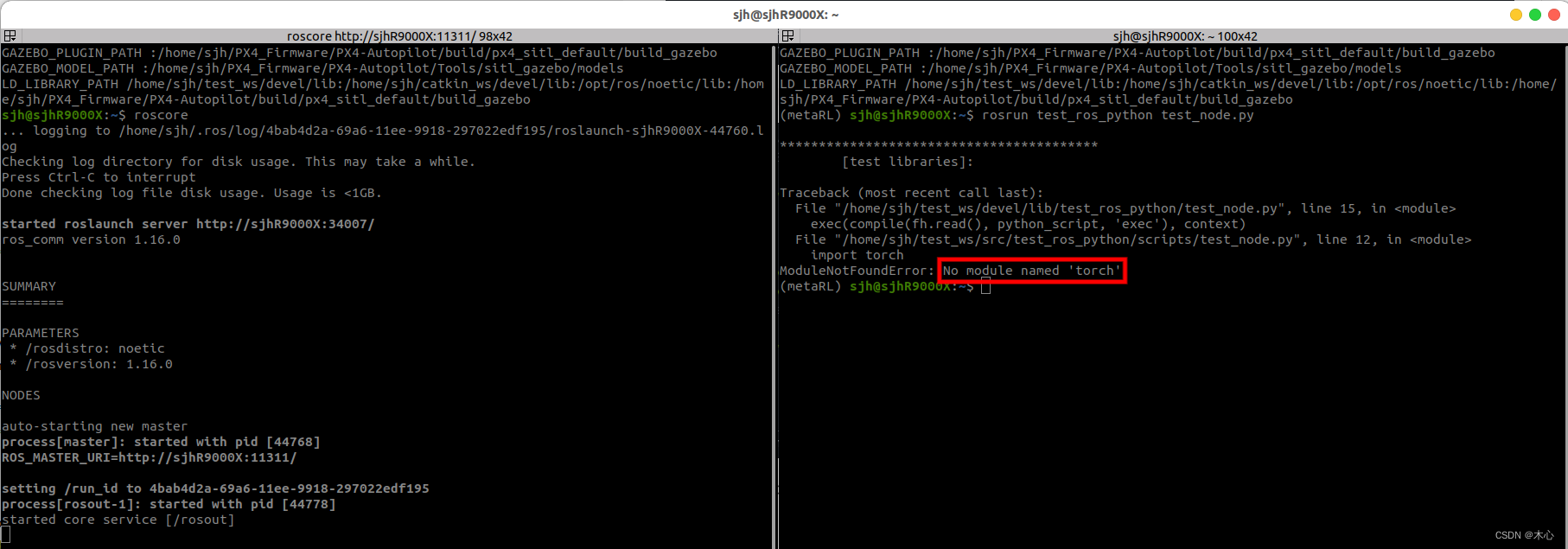
这个结果与我们之前在终端中的结果相违背,那么可以详细查看一下python包的搜索路径,利用sys库
#! /usr/bin/env python
# coding :utf-8print('\n*****************************************\n\t[test libraries]:\n')
import rospy
import sys
for p in sys.path:print(p)# print()
# import torchprint(' - rospy.__file__ = %s'%rospy.__file__)
# print(' - scipy.__file__ = %s'%torch.__file__)
# # check cuda is ready or not
# print('cuda is {}'.format('ready' if torch.cuda.is_available() else 'not ready'))
print('\n*****************************************\n\t[finish test]\n')if __name__ == "__main__":rospy.init_node('test_node', anonymous=True)rospy.loginfo('>>>>> hello world >>>>>')
查看的搜索路径如下
奇怪的是这里并没有我们之前在终端中得到的路径
我们可以手动将这个路径添加到python的搜索路径当中
/home/<your-user-name>/anaconda3/envs/<your-virturalenv-name>/lib/python3.8/site-packages
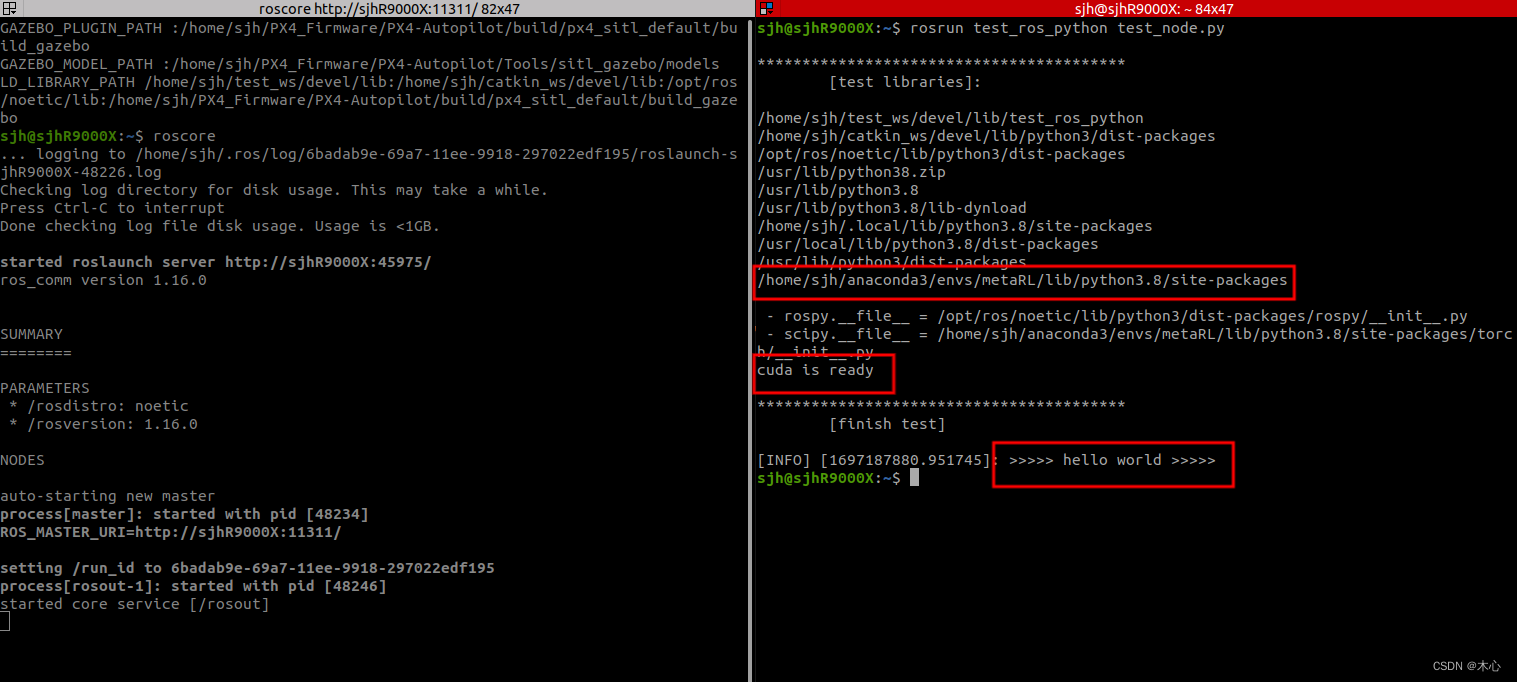
得到如下的脚本文件
#! /usr/bin/env python
# coding :utf-8print('\n*****************************************\n\t[test libraries]:\n')
import rospy
import sys
sys.path.append('/home/sjh/anaconda3/envs/metaRL/lib/python3.8/site-packages')
for p in sys.path:print(p)print()
import torchprint(' - rospy.__file__ = %s'%rospy.__file__)
print(' - scipy.__file__ = %s'%torch.__file__)
# check cuda is ready or not
print('cuda is {}'.format('ready' if torch.cuda.is_available() else 'not ready'))
print('\n*****************************************\n\t[finish test]\n')if __name__ == "__main__":rospy.init_node('test_node', anonymous=True)rospy.loginfo('>>>>> hello world >>>>>')
成功导入了torch
Reference
【Linux】Ubuntu20.04版本配置pytorch环境2023.09.05【教程】
【ROS】如何在ROS中使用anaconda虚拟环境?
ROS图像的Deeplab v3+实时语义分割(ROS+Pytorch)
相关文章:
【ROS】ros-noetic和anaconda联合使用【教程】
【ROS】ros-noetic和anaconda联合使用【教程】 文章目录 【ROS】ros-noetic和anaconda联合使用【教程】1. 安装anaconda2. 创建虚拟环境3. 查看python解释器路径4. 在虚拟环境中使用任意的包5. 创建工作空间和ros功能包进行测试Reference 1. 安装anaconda 在Ubuntu20.04中安装…...

自动化RPA开发 --获取所有窗口信息和进程信息
场景 准备做一个RPA工具,可以从桌面和浏览器选择元素,获取窗口信息和进程信息是必要的,因为获取了窗口信息和进程,可用对程序做一些想要的操作。 coding 工具类 /*** Windows系统工具类*/ public class WinOsUtils {static fi…...
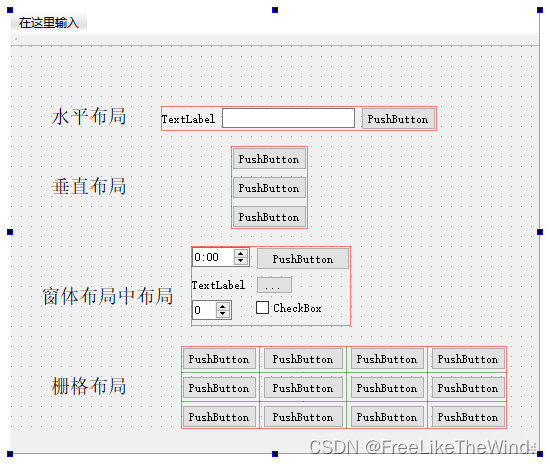
【Qt之布局】QVBoxLayout、QHBoxLayout、QGridLayout、QFormLayout介绍及使用
在Qt中,布局管理器(Layout)用于管理窗口中的控件的位置和大小,以适应不同大小的窗口。 常用的布局管理器包括QVBoxLayout、QHBoxLayout、QGridLayout和QFormLayout。 先放张布局UI: 1. QVBoxLayout(垂直布…...

【计算机毕业设计】python在线课程培训学习考试系统637r7-PyCharm项目
使用说明 使用Navicat或者其它工具,在mysql中创建对应名称的数据库,并导入项目的sql文件; 使用PyCharm 导入项目,修改配置,运行项目; 将项目中config.ini配置文件中的数据库配置改为自己的配置,…...
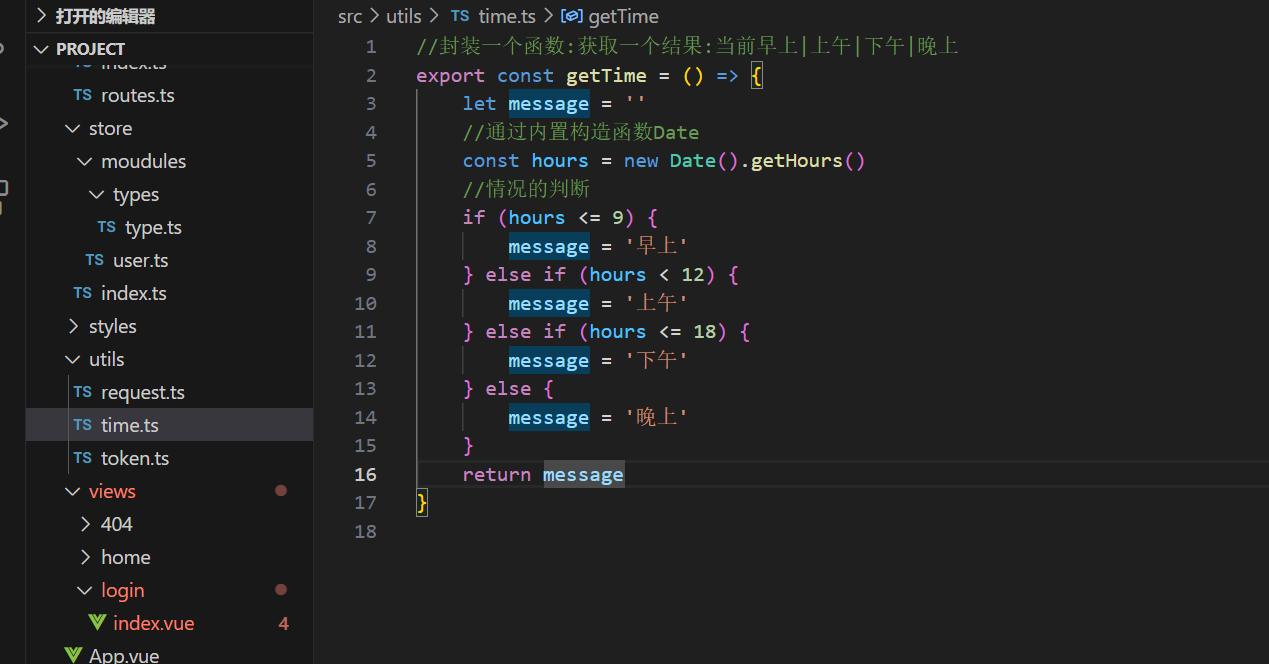
vue3后台管理系统之登录界面和业务的实现
1.静态页面的搭建 <template><div class"login_container"><el-row><el-col :span"12" :xs"0" /><el-col :span"12" :xs"24"><!-- 登录的表单 --><el-form ref"loginForms&qu…...
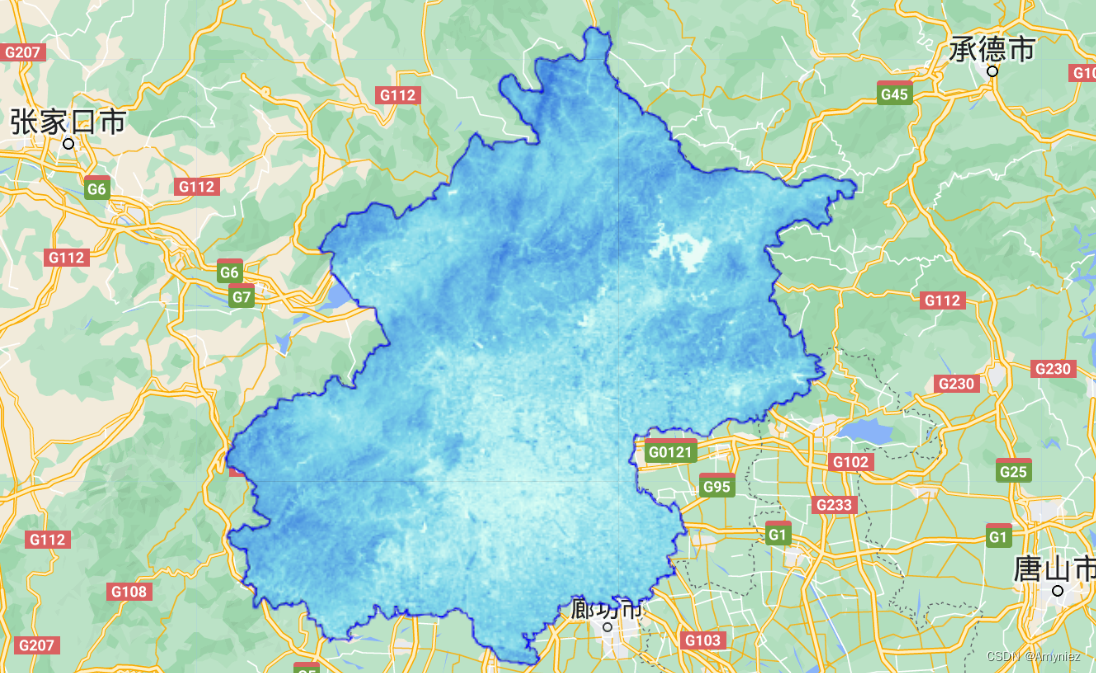
GEE19:基于Landsat8的常见的植被指数逐年获取
植被指数逐年获取 1. 常见的植被指数1.1 比值植被指数(Ratio vegetation index,RVI)1.2 归一化植被指数(Normalized Difference Vegetation Index,NDVI)1.3 增强植被指数(Enhanced Vegetation I…...

Python【多分支实际应用的练习】
要求:某商店T恤的价格为35元/件(2件9折,3件以上8折),裤子的价格为120 元/条(2条以上9折)小明在该店买了3件T恤和2条裤子,请计算并显示小明应该付多少钱? 代码如下: tshirt_price 35 # T恤的单价 pan…...
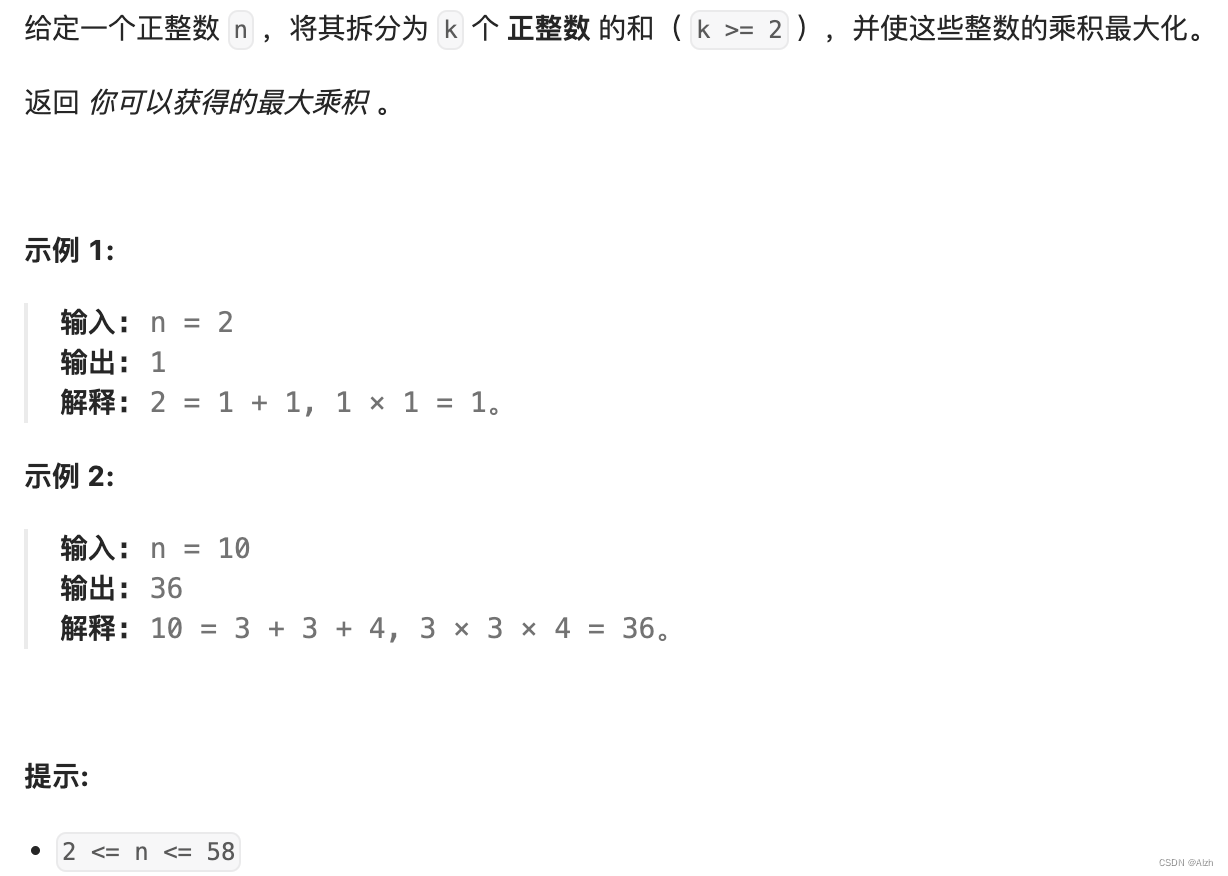
LeetCode 343. 整数拆分(动态规划)
LeetCode 343. 整数拆分 思路: 通过题目我们可以知道,一个正整数最少拆成2个数,最多拆成n个数,即可拆分的个数为2~n 若将拆除的第一个正整数令为k,那么剩下的数则为n-k,此时可以不拆分&#x…...
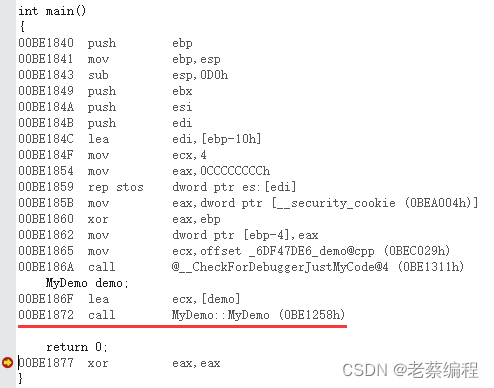
C++对象模型(12)-- 构造函数语义学:构造函数
1、默认构造函数生成规则 编译器不一定会为类生成默认构造函数,但在下列情况下,编译器会生成默认构造函数。 (1)该类没有任何构造函数,但包含一个类类型的成员变量,且成员变量所属的类有默认构造函数。 …...
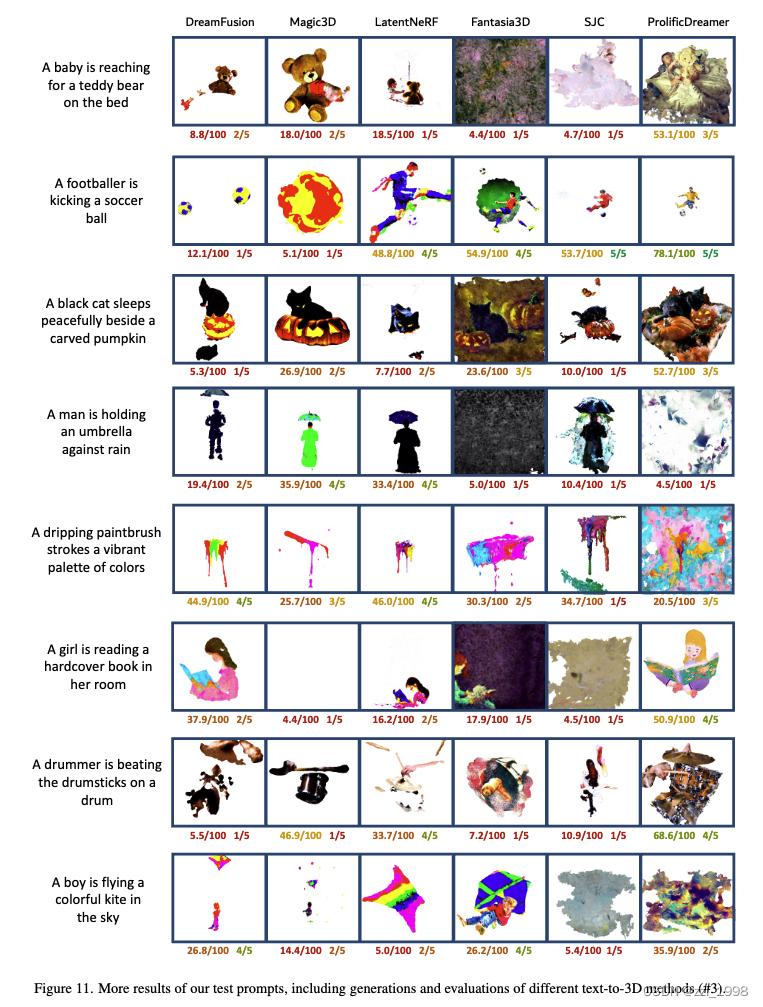
[23] T^3Bench: Benchmarking Current Progress in Text-to-3D Generation
3D生成蓬勃发展,主流方法通过事例比较和用户调查来评价方法好坏,缺少客观比较指标;本文提出Bench,首次综合比较了不同生成方法;具体来说,本文设计了质量评估(Quality Assessment)和对…...

linux系统如何定时关机
立刻关机 poweroff 10分钟后自动关机 shutdown -h 10 如果希望终止上面执行的10分钟关机,则执行: shutdown -c 希望在22:00关闭计算机 shutdown -h 22:00...
构建高性能物联网数据平台:EMQX和CnosDB的完整教程
CnosDB 是一款高性能、高压缩率、高易用性的开源分布式时序数据库。主要应用场景为物联网、工业互联网、车联网和IT运维。所有代码均已在GitHub开源。本文将介绍如何使用EMQX 这一MQTT 服务器 CnosDB 构建物联网数据平台,实现物联网数据的实时流处理。 前言 在物联…...

【vim 学习系列文章 11 -- vim filetype | execute | runtimepath 详细介绍】
文章目录 filetype plugin indent on 什么功能?vim runtimepath 详细介绍vim 中 execute 命令详细介绍execute pathogen#infect() 详细介绍 filetype plugin indent on 什么功能? 在网上我们经常可以看到vimrc配置中有 filetype plugin indent on 这个配…...

[备忘]WindowsLinux上查看端口被什么进程占用|端口占用
Windows上 查看端口占用: netstat -aon|findstr <端口号> 通过进程ID查询进程信息 tasklist | findstr <上一步查出来的进程号> 图例: Linux 上 查看端口占用: netstat -tuln | grep <端口号> lsof -i:<端口号&…...

函数的扩展
文章目录 函数的扩展1.函数参数的默认值1.1 基本用法-- 参数变量是默认声明的,所以不能用 let或const 再次声明-- 使用参数默认值时,函数不能有同名参数1.2 与解构赋值默认值结合使用☆☆☆ 函数参数的默认值生效以后,参数解构赋值依然会进行…...
Cypress安装使用
node.js 安装使用Cypress总是会看见node.js,那就先看看node.js是什么。JavaScript以前运行需要在浏览器中(浏览器内置解释器),通过node.js框架内置v8引擎(也就是可以执行js脚本所需的工具),这样…...
怎么把图片改成jpg格式?
怎么把图片改成jpg格式?大家都知道,随着计算机被发明到现在已经存在了很多年,在这么多的的技术发展过程中,也形成了种类非常多的图片文件格式,例如平时我们能接触到的图片格式有jpg、png、gif、bmp、heic、tiff、jfif、…...

[一带一路金砖 2023 CTF]Crypto
题1 题目描述: from Crypto.Util.number import * from flag import flag import gmpy2 assert(len(flag)38) flag bytes_to_long(flag)p getPrime(512) q getPrime(512)e 304 enc pow(flag,e,p*q) print(p) print(q) print(enc) #9794998439882070838464987…...

FPGA【Verilog语法】
关键字: and always assign begin buf bufif0 bufif1 case casex casez cmos deassign default defparam disable edge else end endcase endfunction endprimitive endmodule endspecify endtable …...

Flume 整合 Kafka
1.背景 先说一下,为什么要使用 Flume + Kafka? 以实时流处理项目为例,由于采集的数据量可能存在峰值和峰谷,假设是一个电商项目,那么峰值通常出现在秒杀时,这时如果直接将 Flume 聚合后的数据输入到 Storm 等分布式计算框架中,可能就会超过集群的处理能力,这时采用 Kaf…...
)
限时开放|Perplexity学术搜索私藏工作区(含18个学科定制模板+实时更新的期刊影响因子映射表)
更多请点击: https://kaifayun.com 第一章:Perplexity学术搜索的核心价值与适用场景 Perplexity.ai 并非传统搜索引擎,而是一个融合大语言模型推理能力与实时学术信息检索的智能研究协作者。其核心价值在于将“提问—验证—溯源”闭环内化为…...

别再手动折腾了!用Docker Compose 5分钟搞定Kamailio + MySQL + RTPproxy完整SIP服务栈
5分钟极速搭建Kamailio SIP服务栈:Docker Compose实战指南 在VoIP开发领域,快速搭建可靠的SIP服务环境是每个开发者都会遇到的基础需求。传统的手动部署方式往往需要数小时甚至更长时间,涉及复杂的依赖安装、配置文件修改和服务调优。而今天&…...

MySQL 8.0.36 保姆级部署指南:从MSI到ZIP,新手避坑全解析
1. MySQL 8.0.36 安装方式选择 第一次接触MySQL安装的朋友可能会被各种安装包搞晕。目前MySQL 8.0.36主要有两种安装方式:MSI安装程序和ZIP压缩包。这两种方式各有特点,适合不同需求的用户。 MSI安装程序就像我们平时安装软件一样,全程图形化…...

全网最全短临降水预报方向科研辅导
...

独立开发者如何利用 Taotoken 模型广场低成本试错选型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者如何利用 Taotoken 模型广场低成本试错选型 对于资源有限的独立开发者或小型团队而言,在产品开发初期选择合…...
)
高校学生综合测评管理系统(10054)
有需要的同学,源代码和配套文档领取,加文章最下方的名片哦 一、项目演示 项目演示视频 二、资料介绍 完整源代码(前后端源代码SQL脚本)配套文档(LWPPT开题报告/任务书)远程调试控屏包运行一键启动项目&…...
)
废品买卖回收管理系统(10053)
有需要的同学,源代码和配套文档领取,加文章最下方的名片哦 一、项目演示 项目演示视频 二、资料介绍 完整源代码(前后端源代码SQL脚本)配套文档(LWPPT开题报告/任务书)远程调试控屏包运行一键启动项目&…...

OpenClaw用户如何快速接入Taotoken并开始使用Agent工作流
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 OpenClaw用户如何快速接入Taotoken并开始使用Agent工作流 对于已经在使用OpenClaw进行Agent开发的用户来说,接入Taotok…...

开源硬件性能遥测工具openclaw_telemetry:从数据采集到可视化实战
1. 项目概述:从开源遥测数据中洞察硬件性能在硬件开发和性能调优的领域,数据是驱动决策的基石。我们常常需要实时监控CPU、GPU、内存、温度、功耗等一系列关键指标,以评估系统稳定性、定位性能瓶颈或验证优化效果。然而,构建一套稳…...

长期使用Taotoken的TokenPlan套餐带来的月度成本变化感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Taotoken的TokenPlan套餐带来的月度成本变化感受 作为一名中度频率的大模型API使用者,我的日常工作涉及代码生…...