ROS opencv 人脸识别
人脸识别需要在输入的图像中确定人脸(如果存在)的位置、大小和姿态,往往用于生物特征识别、视频监听、人机交互等应用中。2001年,Viola和Jones提出了基于Haar特征的级联分类器对象检测算法,并在2002年由Lienhart和Maydt进行改进,为快速、可靠的人脸检测应用提
供了一种有效方法。OpenCV已经集成了该算法的开源实现,利用大量样本的Haar特征进行分类器训练,然后调用训练好的瀑布级联分类器cascade进行模式匹配。
应用效果
OpenCV已经集成了人脸识别算法,所以我们不需要重新开发该算法,只需要调用OpenCV相应的接口就可以实现人脸识别的功能。
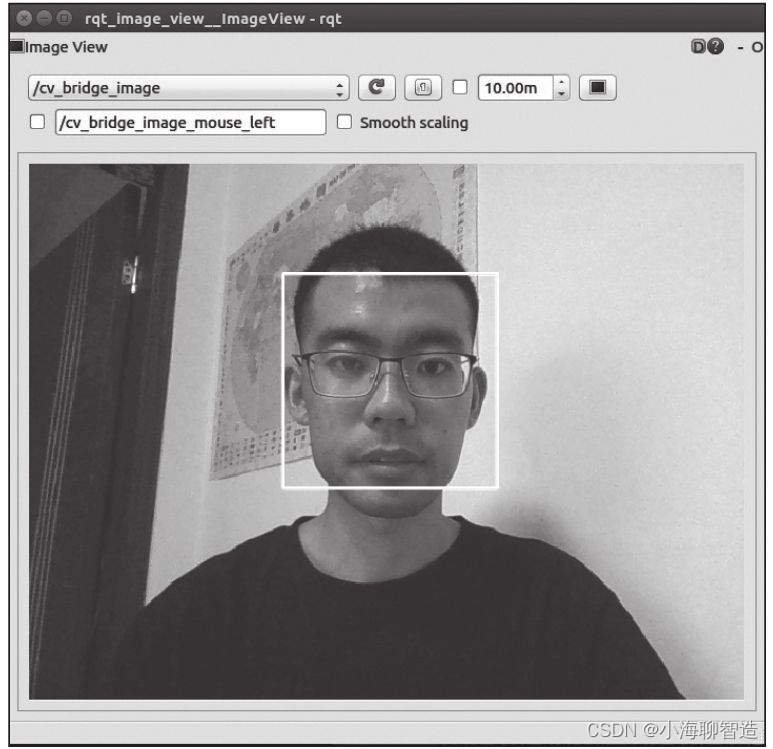
下面运行例程看一下人脸识别是一种怎样的效果。
使用以下命令启动摄像头,然后运行face_detector.launch文件启动人脸识别功能:
roslaunch robot_vision usb_cam.launch
roslaunch robot_vision face_detector.launch
源码实现
现在再回头研究这个例程的源码实现方法。该应用的实现代码只有一个文件,即
robot_vision/script/face_detector.py,主要分成以下三个部分。
1.初始化部分
初始化部分主要完成ROS节点、图像、识别参数的设置。
def __init__(self):
rospy.on_shutdown(self.cleanup);
创建cv_bridge
self.bridge = CvBridge()
self.image_pub = rospy.Publisher("cv_bridge_image", Image, queue_size=1)
获取haar特征的级联表的XML文件,文件路径在launch文件中传入
cascade_1 = rospy.get_param("~cascade_1", "")
cascade_2 = rospy.get_param("~cascade_2", "")
# 使用级联表初始化haar特征检测器
self.cascade_1 = cv2.CascadeClassifier(cascade_1)
self.cascade_2 = cv2.CascadeClassifier(cascade_2)
# 设置级联表的参数,优化人脸识别,可以在launch文件中重新配置
self.haar_scaleFactor = rospy.get_param("~haar_scaleFactor", 1.2)
self.haar_minNeighbors = rospy.get_param("~haar_minNeighbors", 2)
self.haar_minSize = rospy.get_param("~haar_minSize", 40)
self.haar_maxSize = rospy.get_param("~haar_maxSize", 60)
self.color = (50, 255, 50)
# 初始化订阅rgb格式图像数据的订阅者,此处图像topic的话题名可以在launch文件中重映射
self.image_sub = rospy.Subscriber("input_rgb_image", Image, self.image_callback, queue_size=1)
2.ROS图像回调函数
例程节点收到摄像头发布的RGB图像数据后进入回调函数,将图像转换成OpenCV的数据
格式,然后预处理之后开始调用人脸识别的功能函数,最后发布识别结果。
def image_callback(self, data):
使用cv_bridge将ROS的图像数据转换成OpenCV的图像格式
try:
cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")
frame = np.array(cv_image, dtype=np.uint8)
except CvBridgeError, e:
print e
# 创建灰度图像
grey_image = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 创建平衡直方图,减少光线影响
grey_image = cv2.equalizeHist(grey_image)
# 尝试检测人脸
faces_result = self.detect_face(grey_image)
# 在OpenCV的窗口中框出所有人脸区域
if len(faces_result)>0:
for face in faces_result:
x, y, w, h = face
cv2.rectangle(cv_image, (x, y), (x+w, y+h), self.color, 2)
# 将识别后的图像转换成ROS消息并进行发布
self.image_pub.publish(self.bridge.cv2_to_imgmsg(cv_image, "bgr8"))
3.人脸识别
人脸识别部分没有很多代码,直接调用OpenCV提供的人脸识别接口,与数据库中的人脸特
征进行匹配。
def detect_face(self, input_image):
# 首先匹配正面人脸的模型
if self.cascade_1:
faces = self.cascade_1.detectMultiScale(input_image,
self.haar_scaleFactor,
self.haar_minNeighbors,
cv2.CASCADE_SCALE_IMAGE,
(self.haar_minSize, self.haar_maxSize))
如果正面人脸匹配失败,那么就尝试匹配侧面人脸的模型
if len(faces) == 0 and self.cascade_2:
faces = self.cascade_2.detectMultiScale(input_image,
self.haar_scaleFactor,
self.haar_minNeighbors,
cv2.CASCADE_SCALE_IMAGE,
(self.haar_minSize, self.haar_maxSize))
return faces
代码中有一些参数和话题名需要在launch文件中设置,所以还需要编写一个运行例程的
launch文件robot_vision/launch/face_detector.launch:
<launch>
<node pkg="robot_vision" name="face_detector" type="face_detector.py" output="screen">
<remap from="input_rgb_image" to="/usb_cam/image_raw" />
<rosparam>
haar_scaleFactor: 1.2
haar_minNeighbors: 2
haar_minSize: 40
haar_maxSize: 60
</rosparam>
<param name="cascade_1" value="$(find robot_vision)/data/haar_detectors/haarcascade_frontalface_alt.xml" />
<param name="cascade_2" value="$(find robot_vision)/data/haar_detectors/haarcascade_profileface.xml" />
</node>
</launch>
以上我们结合ROS和OpenCV实现了一个人脸识别的机器视觉应用。
相关文章:
ROS opencv 人脸识别
人脸识别需要在输入的图像中确定人脸(如果存在)的位置、大小和姿态,往往用于生物特征识别、视频监听、人机交互等应用中。2001年,Viola和Jones提出了基于Haar特征的级联分类器对象检测算法,并在2002年由Lienhart和Mayd…...
文心一言 4.0 ERNIE-Bot 4.0 :ERNIE-Bot 4.0 大模型深度测试体验报告
本心、输入输出、结果 文章目录 文心一言 4.0 ERNIE-Bot 4.0 :ERNIE-Bot 4.0 大模型深度测试体验报告前言相关跳转文心一言 4.0 ERNIE-Bot 4.0 接口简介Bash 请求示例代码Windows 模式使用 Python 请求如果直接使用官方提供的代码文心一言 4.0 ERNIE-Bot 4.0 API 在…...
华为OD机考B卷 | 100分】阿里巴巴找黄金宝箱(JAVA题解——也许是全网最详)
前言 本人是算法小白,甚至也没有做过Leetcode。所以,我相信【同为菜鸡的我更能理解作为菜鸡的你们的痛点】。 题干 1. 题目描述 一贫如洗的樵夫阿里巴巴在去砍柴的路上,无意中发现了强盗集团的藏宝地,藏宝地有编号从0~N的箱子&…...
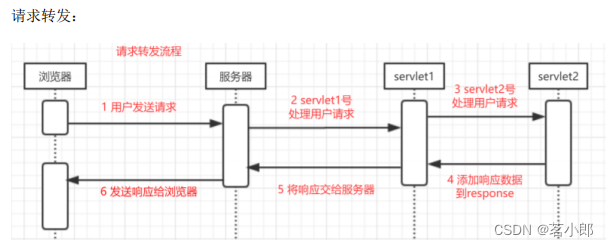
请求转发和重定向区别
两者区别: 1.转发在一次请求中完成,重定向是两次请求 2.转发操作发生在服务器内部,重定向是在浏览器执行操作 3.转发地址栏不变,重定向地址栏变化(两次请求,两个地址) 4.转发可以在一次请求中共…...

JS如何判断对象为空?以及各自的缺点。
JS如何判断对象为空?以及各自的缺点。 Object.keys() 通过 Object.keys() 来获取对象的键进行判断。 function isEmpty(obj) {return Object.keys(obj).length 0; }console.log(isEmpty({})); // true console.log(isEmpty({ a: 1 })); // false缺点:…...

同城代驾开源版小程序开发
同城代驾开源版小程序开发 功能特性描述: 定价模式:本系统支持灵活的计价模式,包括白天和夜晚的起步价、起步里程、每公里价以及超时费用,从而满足不同时段的定价需求。 实时路径计算:通过集成腾讯地图的软件开发工…...

【Python机器学习】零基础掌握ShrunkCovariance协方差估计
有没有想过如何准确地评估股票投资的风险? 在投资领域,了解各种资产(如股票、债券等)之间的相关性和波动性是非常重要的。常用的方法是计算资产收益率的协方差矩阵,但这个矩阵在样本量少或数据质量不高的情况下可能会产生误导。那么,有没有更好的方法来解决这个问题呢?…...

精神科常用评估量表汇总,建议收藏!
根据精神科医生的量表使用情况,笔者整理了10个精神科常用量表,可在线评测直接出结果,可转发使用,可生成二维码使用,可创建项目进行数据管理,有需要的小伙伴赶紧收藏! 抑郁自评量表 抑郁自评量表…...

Python之切片
Python之切片 切片 通过给定的索引区间获得线性结构的一部分数据start、stop、step为整数,可以是正整数、负整数、零start为0时,可以省略stop为末尾时,可以省略step为1时,可以省略切片时,索引超过上界(右边界)&#…...
)
OpenCV显示中文(python)
OpenCV添加文字的方法putText(…),添加英文是没有问题的,但如果你要添加中文就会出现“???”的乱码,需要特殊处理一下。 下文提供封装好的(代码)方法,供OpenCV添加中文使…...

k8s-18 认证授权
Authentication (认证) 认证方式现共有8种,可以启用一种或多种认证方式,只要有一种认证方式通过,就不再进行其它方式的认证。通常启用X509 Client Certs和Service Accout Tokens两种认证方式 Kubernetes集群有两类用户:由Kubernetes管理的Ser…...
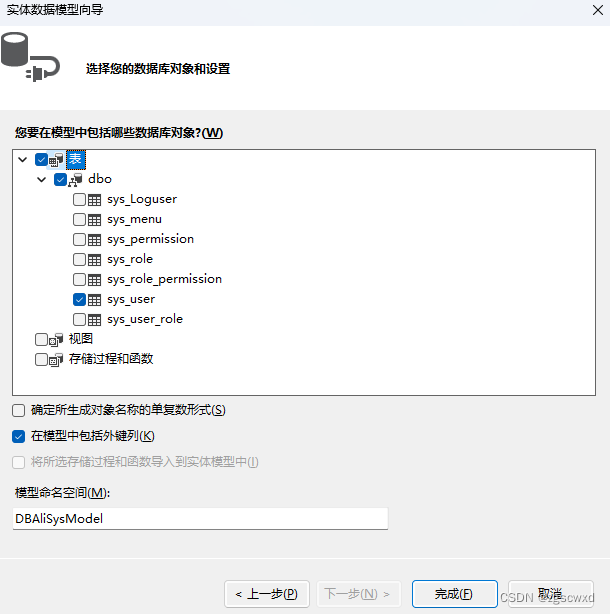
WebAPI+EF连接SQL Server数据库
右击解决方案-添加-新建项目-选择“类库(.NET Framework)”,新建的项目取名叫WebApi1.EF 添加EF: 新建一个ADO实体数据模型 选择DBFirst 数据源选择MySql 填写数据库地址及账号密码 选择实体框架版本 选择在数据库中的表User 到此配置完成&am…...

maven-plugin-shade 详解1
maven-plugin-shade 是 Maven 的一个插件,它的作用是将多个 jar 包合并成一个 jar,同时将其中的依赖关系也合并到该 jar 中。这个插件常用于创建可执行 jar 包和打包 web 应用程序。 下面是 maven-plugin-shade 的一些常用配置: 打包的形式&…...

C#中LinkedList、Queue<T>和Stack<T>的使用
1、LinkedList(链表) 链表中元素存储内存中是不连续分配,每个元素都有记录前后节点,节点值可以重复,不能通过下标访问,泛型的使用保证类型安全,可以避免装箱拆箱,找元素就只能遍历,查找不方便&…...

流程图如何制作?好用的11款流程图软件盘点!
流程图是一种强大的可视化工具,用于清晰地展示各种过程和步骤,应用非常广泛,在各个行业中随处可见,凡是涉及流程步骤的场景,都可以用到流程图,那么问题来了:流程图如何制作? 这篇文…...

windows本地文件上传linux 或 linux输入rz命令后出现receive.**B0100000023be50
这种现象需要客户端支持,或者使用Xshell工具等 但是有一种简单的方法,使用 sftp rootip地址 // 比如 sftp root127.0.0.2 当然,你要记得登录远程节点的密码:...
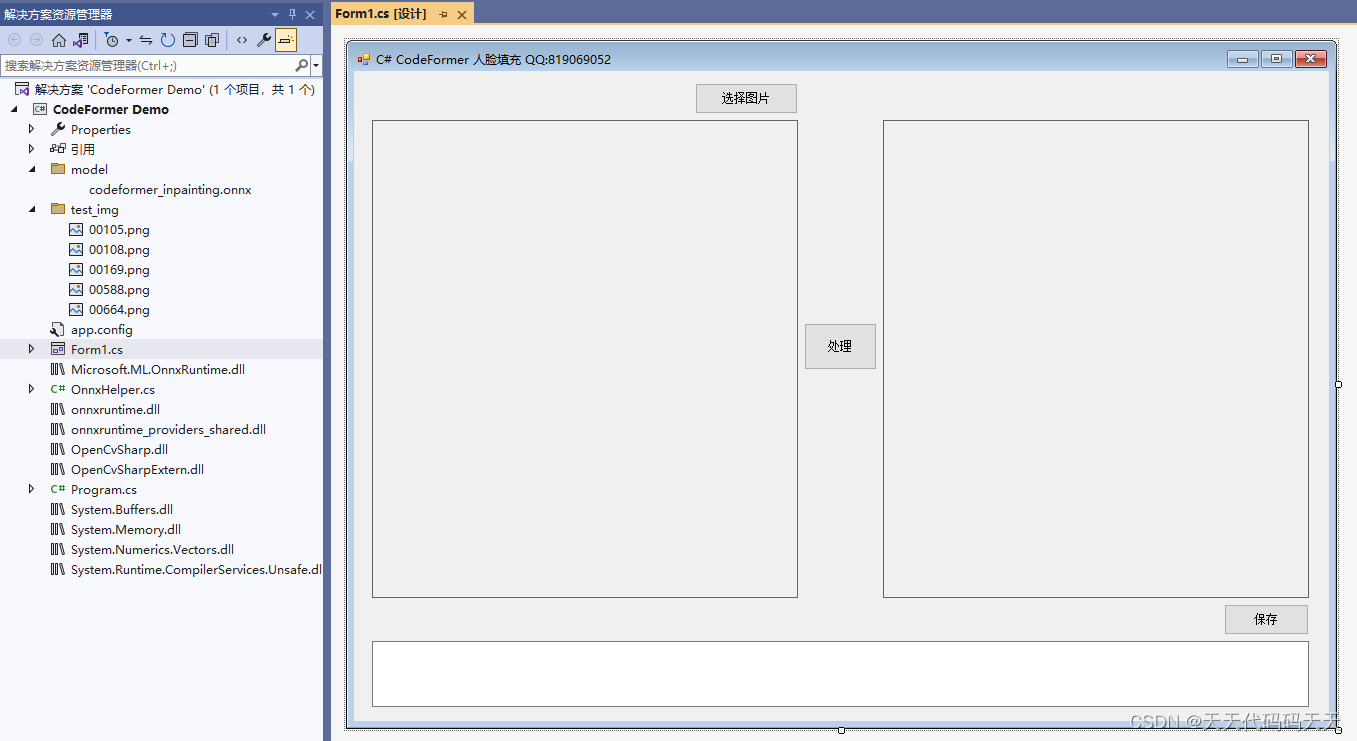
C# CodeFormer Inpainting 人脸填充
效果 项目 代码 using Microsoft.ML.OnnxRuntime; using Microsoft.ML.OnnxRuntime.Tensors; using OpenCvSharp; using System; using System.Collections.Generic; using System.Drawing; using System.Drawing.Imaging; using System.Windows.Forms;namespace CodeFormer_D…...
将Sketch文件转化为PSD文件的简单在线工具!
设计工作不仅需要UI设计工具,还需要Photoshop。常见的UI设计工具Sketch与Photoshop软件不兼容。如果你想在实际工作中完成Sketch转psd,你需要使用其他软件进行转换。但是在转换过程中容易丢失文件,导致同样的工作需要重复多次才能完成&#x…...

【广州华锐互动】利用AR进行野外地质调查学习,培养学生实践能力
在科技发展的驱动下,AR(增强现实)技术已经在许多领域中找到了应用,包括医疗、教育、建筑和娱乐等。然而,有一个领域尚未充分利用AR技术的潜力,那就是野外地质调查。通过将AR技术引入到这个传统上需要大量人…...

Jmeter快速入门
引言 对于初学者来说,可能会觉得jmeter有些难入手。不过,别担心!在我开始使用Jmeter之前,也曾面临着同样的问题。 但是,通过一番尝试和学习,我现在可以自如地运用Jmeter进行性能测试了。 接下来…...

从编译失败到成功发布:用VS BuildTools彻底解决MSBuild“能编译不能发布”的坑
从编译到发布:彻底解决MSBuild部署.NET Framework网站的技术困境 许多.NET开发者都曾遇到过这样的场景:在命令行中能够顺利编译项目,却在尝试发布(Publish)ASP.NET网站时遭遇各种莫名错误。这种"能编译不能发布&q…...

EvoAgentX智能体开发框架:模块化架构与进化引擎解析
1. 项目概述:一个面向未来的智能体开发框架最近在探索智能体(Agent)开发领域时,我遇到了一个名为“EvoAgentX”的项目。这个名字本身就很有意思,“Evo”暗示着进化,“AgentX”则指向了智能体及其无限的可能…...

酒吧数字化方案:Java德州扑克小酒馆扫码点餐预约系统源码
在消费升级与数字化转型的大背景下,中小型德州扑克小酒馆的运营模式正逐步从“人工主导”向“数字化赋能”转变。不同于传统酒吧,德州扑克小酒馆以“休闲娱乐餐饮服务”为核心,其运营痛点集中在点餐效率低、预约管理乱、桌台调度难、合规管控…...
错误的区别)
别只会关规则!深入理解TypeScript项目里ESLint的no-unused-vars警告与ts(6133)错误的区别
深度解析TypeScript项目中ESLint与TypeScript的未使用变量检测机制 在TypeScript与React结合的项目中,开发者常常会遇到一个看似相同却本质不同的警告:变量声明后未被使用。VSCode可能会同时显示两种提示——来自TypeScript编译器的ts(6133)错误和来自ES…...

Linux只读挂载保护排查方法
Linux只读挂载保护排查方法本文面向具备一定 Linux 基础的技术人员,围绕只读挂载保护展开,重点讨论写入隔离、配置保护和异常诊断。在中级运维和系统管理工作中,这类主题常常与配置变更、资源状态、权限边界、自动化任务和业务影响交织在一起…...

音频智能切片工具:快速解放双手的终极音频分割解决方案
音频智能切片工具:快速解放双手的终极音频分割解决方案 【免费下载链接】audio-slicer A simple GUI application that slices audio with silence detection 项目地址: https://gitcode.com/gh_mirrors/aud/audio-slicer 还在为处理冗长的音频文件而烦恼吗&…...

高性能WebGL地图引擎OME:海量地理空间数据可视化实战指南
1. 项目概述与核心价值 如果你在开源社区里混迹过一段时间,尤其是对数据可视化、地理信息系统或者大规模图数据渲染感兴趣,那么“sgl-project/ome”这个项目标题很可能已经引起了你的注意。OME,全称可能是“Open Map Engine”或类似的概念&am…...

LabVIEW PC端软件开发:架构设计、性能优化与工程化实践
1. 项目概述:为什么选择在PC上深耕LabVIEW开发?当大家谈论起LabVIEW,很多人的第一印象可能还停留在它与各种数据采集卡、PLC、嵌入式硬件绑定的场景里。作为一个在这个图形化编程环境里摸爬滚打了十多年的老工程师,我想说…...

Next.js 14全栈样板工程解析:集成Prisma与NextAuth的现代Web开发实践
1. 项目概述:一个为现代Web应用量身定制的启动器如果你正在寻找一个能让你跳过繁琐的初始化配置,直接进入核心业务逻辑开发的Next.js项目起点,那么nemanjam/nextjs-prisma-boilerplate这个项目很可能就是你需要的。这不是一个简单的“Hello W…...

SmartDock:如何在Android设备上构建高效桌面环境
SmartDock:如何在Android设备上构建高效桌面环境 【免费下载链接】smartdock A user-friendly desktop mode launcher that offers a modern and customizable user interface 项目地址: https://gitcode.com/gh_mirrors/smar/smartdock 当Android设备从手机…...