手部关键点检测3:Pytorch实现手部关键点检测(手部姿势估计)含训练代码和数据集
手部关键点检测3:Pytorch实现手部关键点检测(手部姿势估计)含训练代码和数据集
目录
手部关键点检测3:Pytorch实现手部关键点检测(手部姿势估计)含训练代码和数据集
1. 前言
2.手部关键点检测(手部姿势估计)方法
(1)Top-Down(自上而下)方法
(2)Bottom-Up(自下而上)方法:
3.手部关键点检测数据集
4.手部关键点检测模型训练
(1)项目安装
(2)准备Train和Test数据
(3)配置文件configs
(4)开始训练
(5)Tensorboard可视化训练过程
5.手部关键点检测模型效果
6.手部关键点检测(推理代码)
7.手部关键点检测(训练代码)
8.手部关键点检测C++/Android版本
1. 前言
本篇文章是项目《手部关键点检测(手部姿势估计)》系列文章之《Pytorch实现手部关键点检测(手部姿势估计)》;项目基于Pytorch深度学习框架,实现手部关键点检测(手部姿势估计)模型,其中手部检测采用YOLOv5模型,手部关键点检测是基于开源的HRNet进行改进,构建了整套手部关键点检测的训练和测试流程;为了方便后续模型工程化和Android平台部署,项目支持高精度HRNet检测模型,轻量化模型LiteHRNet和Mobilenet模型训练和测试,并提供Python/C++/Android多个版本;

轻量化Mobilenet-v2模型在普通Android手机上可以达到实时的检测效果,CPU(4线程)约50ms左右,GPU约30ms左右 ,基本满足业务的性能需求。下表格给出HRNet,以及轻量化模型LiteHRNet和Mobilenet的计算量和参数量,以及其检测精度
| 模型 | input-size | params(M) | GFLOPs | AP |
| HRNet-w32 | 192×192 | 28.48M | 5734.05M | 0.8570 |
| LiteHRNet18 | 192×192 | 1.10M | 182.15M | 0.8023 |
| Mobilenet-v2 | 192×192 | 2.63M | 529.25M | 0.7574 |
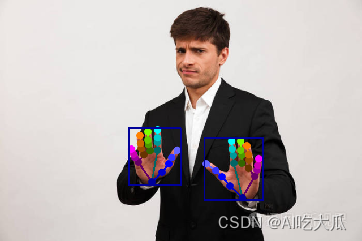
先展示一下手部检测以及手部关键点检测(手部姿势估计)效果:

Android手部关键点检测(手部姿势估计)APP Demo体验:
https://download.csdn.net/download/guyuealian/88418582
【尊重原创,转载请注明出处】https://blog.csdn.net/guyuealian/article/details/133277726
更多项目《手部关键点检测(手部姿势估计)》系列文章请参考:
- 手部关键点检测1:手部关键点(手部姿势估计)数据集(含下载链接)https://blog.csdn.net/guyuealian/article/details/133277630
- 手部关键点检测2:YOLOv5实现手部检测(含训练代码和数据集)https://blog.csdn.net/guyuealian/article/details/133279222
- 手部关键点检测3:Pytorch实现手部关键点检测(手部姿势估计)含训练代码和数据集https://blog.csdn.net/guyuealian/article/details/133277726
- 手部关键点检测4:Android实现手部关键点检测(手部姿势估计)含源码 可实时检测https://blog.csdn.net/guyuealian/article/details/133277732
- 手部关键点检测5:C++实现手部关键点检测(手部姿势估计)含源码 可实时检测https://blog.csdn.net/guyuealian/article/details/133277748

2.手部关键点检测(手部姿势估计)方法
手部关键点检测(手部姿势估计)的方法,目前主流的方法主要两种:一种是Top-Down(自上而下)方法,另外一种是Bottom-Up(自下而上)方法;
(1)Top-Down(自上而下)方法
将手部检测和手部关键点估计分离,在图像上首先进行手部目标检测,定位手部位置;然后crop每一个手部图像,再估计每个手部的关键点;这类方法往往比较慢,但姿态估计准确度较高。目前主流模型主要有CPN,Hourglass,CPM,Alpha Pose,HRNet等。
(2)Bottom-Up(自下而上)方法:
先估计图像中所有手部的关键点,然后在通过Grouping的方法组合成一个一个手部实例;因此这类方法在测试推断的时候往往更快速,准确度稍低。典型就是COCO2016年人体关键点检测冠军Open Pose。
通常来说,Top-Down具有更高的精度,而Bottom-Up具有更快的速度;就目前调研而言, Top-Down的方法研究较多,精度也比Bottom-Up(自下而上)方法高。
本项目基于开源的HRNet进行改进,关于HRNet项目请参考GitHub
HRNet: https://github.com/leoxiaobin/deep-high-resolution-net.pytorch
3.手部关键点检测数据集
项目收集了三个手部检测数据集和三个手部关键点数据集:
- 手部检测数据集(Hand Detection Dataset)共收集了三个:Hand-voc1,Hand-voc2和Hand-voc3,总共60000+张图片;标注格式统一转换为VOC数据格式,标注名称为hand,可用于深度学习手部目标检测模型算法开发
-
手部关键点数据集(Hand Keypoints Dataset,Hand Pose Estimation共收集了三个:分别为HandPose-v1,HandPose-v2和HandPose-v3,总共80000+张图片,标注了手部21个关键点,可用于深度学习手部姿态检测模型算法开发。
关于手部关键点检测数据集说明,请参考:手部关键点(手部姿势估计)数据集(含下载链接) https://blog.csdn.net/guyuealian/article/details/133277630
4.手部关键点检测模型训练
整套工程项目基本结构如下:
.
├── configs # 训练配置文件
├── data # 一些数据
├── libs # 一些工具库
├── pose # 姿态估计模型文件
├── work_space # 训练输出工作目录
├── demo.py # 模型推理demo文件
├── README.md # 项目工程说明文档
├── requirements.txt # 项目相关依赖包
└── train.py # 训练文件(1)项目安装
项目依赖python包请参考requirements.txt,使用pip安装即可,项目代码都在Ubuntu系统和Windows系统验证正常运行,请放心使用;若出现异常,大概率是相关依赖包版本没有完全对应
numpy==1.16.3
matplotlib==3.1.0
Pillow==6.0.0
easydict==1.9
opencv-contrib-python==4.5.2.52
opencv-python==4.5.1.48
pandas==1.1.5
PyYAML==5.3.1
scikit-image==0.17.2
scikit-learn==0.24.0
scipy==1.5.4
seaborn==0.11.2
tensorboard==2.5.0
tensorboardX==2.1
torch==1.7.1+cu110
torchvision==0.8.2+cu110
tqdm==4.55.1
xmltodict==0.12.0
basetrainer
basetrainer
pybaseutils==0.9.4
pycocotools==2.0.6
项目安装教程请参考(初学者入门,麻烦先看完下面教程,配置好开发环境):
- 项目开发使用教程和常见问题和解决方法
- 视频教程:1 手把手教你安装CUDA和cuDNN(1)
- 视频教程:2 手把手教你安装CUDA和cuDNN(2)
- 视频教程:3 如何用Anaconda创建pycharm环境
- 视频教程:4 如何在pycharm中使用Anaconda创建的python环境
(2)准备Train和Test数据
下载手部关键点检测数据集:HandPose-v1,HandPose-v2和HandPose-v3,然后解压到本地
(3)配置文件configs
项目支持HRNet以及轻量化模型LiteHRNet和Mobilenet模型训练,并提供对应的配置文件;你需要修改对应配置文件的数据路径;本篇以训练HRNet-w32为例子,其配置文件在configs/coco/hrnet/w32_adam_hand_192_192.yaml,修改该文件的训练数据集路径TRAIN_FILE(支持多个数据集训练)和测试数据集TEST_FILE的数据路径为你本地数据路径,其他参数保持默认即可,如下所示:
WORKERS: 8
PRINT_FREQ: 10
DATASET:DATASET: 'custom_coco'TRAIN_FILE:- 'D:/dataset/HandPose-v1/train/train_anno.json'- 'D:/dataset/HandPose-v2/train/train_anno.json'- 'D:/dataset/HandPose-v3/train/train_anno.json'TEST_FILE: 'D:/dataset/HandPose-v1/test/test_anno.json'FLIP: trueROT_FACTOR: 45SCALE_FACTOR: 0.3SCALE_RATE: 1.25JOINT_IDS: [ ]FLIP_PAIRS: [ ]SKELETON: [ [ 0, 1 ], [ 1, 2 ], [ 2, 3 ], [ 3, 4 ], [ 0, 5 ], [ 5, 6 ], [ 6, 7 ], [ 7, 8 ], [ 5, 9 ], [ 9, 10 ], [ 10, 11 ], [ 11, 12 ], [ 9, 13 ], [ 13, 14 ], [ 14, 15 ], [ 15, 16 ], [ 13, 17 ], [ 17, 18 ], [ 18, 19 ], [ 19, 20 ], [ 0, 17 ] ]
配置文件的一些参数说明,请参考
| 参数 | 类型 | 参考值 | 说明 |
| WORKERS | int | 8 | 数据加载处理的进程数 |
| PRINT_FREQ | int | 10 | 打印LOG信息的间隔 |
| DATASET | str | custom_coco | 数据集类型,目前仅支持COCO数据格式 |
| TRAIN_FILE | List | - | 训练数据集文件列表(COCO数据格式),支持多个数据集 |
| TEST_FILE | string | - | 测试数据集文件(COCO数据格式),仅支持单个数据集 |
| FLIP | bool | True | 是否翻转图片进行测试,可提高测试效果 |
| ROT_FACTOR | float | 45 | 训练数据随机旋转的最大角度,用于数据增强 |
| SCALE_FACTOR | float | 1.25 | 图像缩放比例因子 |
| SCALE_RATE | float | 0.25 | 图像缩放率 |
| JOINT_IDS | list | [ ] | [ ]表示所有关键点,也可以指定需要训练的关键点序号ID |
| FLIP_PAIRS | list | [ ] | 图像翻转时,关键点不受翻转影响的ID号 |
| SKELETON | list | [ ] | 关键点连接线的序列列表,用于可视化效果 |
(4)开始训练
修改好配置文件后,就可以开始准备训练了:
- 训练高精度模型HRNet-w48或者HRNet-w32
# 高精度模型:HRNet-w48
python train.py -c "configs/coco/hrnet/w48_adam_hand_192_192.yaml" --workers=8 --batch_size=32 --gpu_id=0 --work_dir="work_space/hand"
# 高精度模型:HRNet-w32
python train.py -c "configs/coco/hrnet/w32_adam_hand_192_192.yaml" --workers=8 --batch_size=32 --gpu_id=0 --work_dir="work_space/hand"
- 训练轻量化模型LiteHRNet
# 轻量化模型:LiteHRNet
python train.py -c "configs/coco/litehrnet/litehrnet18_hand_192_192.yaml" --workers=8 --batch_size=32 --gpu_id=0 --work_dir="work_space/hand"
- 训练轻量化模型Mobilenetv2
# 轻量化模型:Mobilenet
python train.py -c "configs/coco/mobilenet/mobilenetv2_hand_192_192.yaml" --workers=8 --batch_size=32 --gpu_id=0 --work_dir="work_space/hand"
下表格给出HRNet,以及轻量化模型LiteHRNet和Mobilenet的计算量和参数量,以及其检测精度AP; 高精度检测模型HRNet-w32,AP可以达到0.8570,但其参数量和计算量比较大,不合适在移动端部署;LiteHRNet18和Mobilenet-v2参数量和计算量比较少,合适在移动端部署;虽然LiteHRNet18的理论计算量和参数量比Mobilenet-v2低,但在实际测试中,发现Mobilenet-v2运行速度更快。轻量化Mobilenet-v2模型在普通Android手机上可以达到实时的检测效果,CPU(4线程)约50ms左右,GPU约30ms左右 ,基本满足业务的性能需求
| 模型 | input-size | params(M) | GFLOPs | AP |
| HRNet-w32 | 192×192 | 28.48M | 5734.05M | 0.8570 |
| LiteHRNet18 | 192×192 | 1.10M | 182.15M | 0.8023 |
| Mobilenet-v2 | 192×192 | 2.63M | 529.25M | 0.7574 |
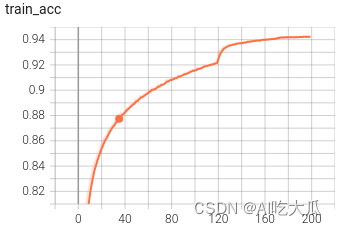
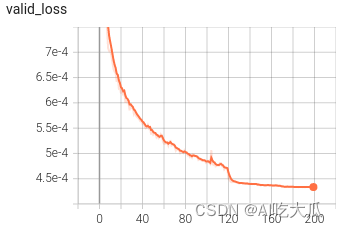
(5)Tensorboard可视化训练过程
训练过程可视化工具是使用Tensorboard,使用方法,在终端输入:
# 基本方法
tensorboard --logdir=path/to/log/
# 例如
tensorboard --logdir="work_space/hand/hrnet_w32_21_192_192_custom_coco_20231007_083128_2043/log"点击终端TensorBoard打印的链接,即可在浏览器查看训练LOG信息等:


5.手部关键点检测模型效果
demo.py文件用于推理和测试模型的效果,填写好配置文件,模型文件以及测试图片即可运行测试了;demo.py命令行参数说明如下:
| 参数 | 类型 | 参考值 | 说明 |
|---|---|---|---|
| -c,--config_file | str | - | 配置文件 |
| -m,--model_file | str | - | 模型文件 |
| target | str | - | 骨骼点类型,如hand,coco_person,mpii |
| image_dir | str | data/image | 测试图片的路径 |
| video_file | str,int | - | 测试的视频文件 |
| out_dir | str | output | 保存结果,为空不保存 |
| threshold | float | 0.3 | 关键点检测置信度 |
| device | str | cuda:0 | GPU ID |
下面以运行HRNet-w32为样例,其他模型修改--config_file或者--model_file即可
- 测试图片
python demo.py -c "work_space/hand/hrnet_w32_21_192_192_custom_coco_20231007_083128_2043/w32_adam_hand_192_192.yaml" -m "work_space/hand/hrnet_w32_21_192_192_custom_coco_20231007_083128_2043/model/best_model_189_0.8570.pth" --target "hand" --image_dir "data/hand" --out_dir "output"- 测试视频文件
python demo.py -c "work_space/hand/hrnet_w32_21_192_192_custom_coco_20231007_083128_2043/w32_adam_hand_192_192.yaml" -m "work_space/hand/hrnet_w32_21_192_192_custom_coco_20231007_083128_2043/model/best_model_189_0.8570.pth" --target "hand" --video_file "data/hand/test-video.mp4" --out_dir "output"- 测试摄像头
python demo.py -c "work_space/hand/hrnet_w32_21_192_192_custom_coco_20231007_083128_2043/w32_adam_hand_192_192.yaml" -m "work_space/hand/hrnet_w32_21_192_192_custom_coco_20231007_083128_2043/model/best_model_189_0.8570.pth" --target "hand" --video_file 0 --out_dir "output"
运行效果:





6.手部关键点检测(推理代码)
手部关键点检测推理代码下载地址:Pytorch实现手部关键点检测(手部姿势估计) Python推理代码
手部关键点检测推理代码内容包含:
(1)手部关键点检测推理代码(Pytorch)
- 提供YOLOv5手部检测推理代码(不包含训练代码)
- 提供手部关键点检测推理代码demo.py(不包含训练代码)
- 提供高精度版本HRNet手部关键点检测(不包含训练代码)
- 提供轻量化模型LiteHRNet,以及Mobilenet-v2手部关键点检测(不包含训练代码)
- 提供训练好的模型:HRNet-w32,LiteHRNet和Mobilenet-v2模型,配置好环境,可直接运行demo.py
- 推理代码demo.py支持图片,视频和摄像头测试
如果你需要配套的训练数据集和训练代码,请查看下面部分
7.手部关键点检测(训练代码)
手部关键点检测训练代码下载地址: Pytorch实现手部关键点检测(手部姿势估计)》 含训练代码和数据集
手部关键点检测训练代码内容包含:手部检测数据集和手部关键点数据集 + 手部关键点检测训练和测试代码
(1)手部检测数据集和手部关键点数据集:
手部检测数据集:包含Hand-voc1,Hand-voc2和Hand-voc3,总共60000+张图片;标注格式统一转换为VOC数据格式,标注名称为hand,可用于深度学习手部目标检测模型算法开发。
手部关键点数据集:包含HandPose-v1,HandPose-v2和HandPose-v3,总共80000+张图片;标注了手部区域目标框box,标注名称为hand,同时也标注了手部21个关键点,标注格式统一转换为COCO数据格式,可直接用于深度学习手部关键点检测模型训练。
数据集详细说明,请查看《手部关键点(手部姿势估计)数据集(含下载链接)》https://blog.csdn.net/guyuealian/article/details/133277630
(2)手部关键点检测训练代码和测试代码(Pytorch)
- 提供YOLOv5手部检测推理代码(不包含训练代码)
- 提供整套完整的手部关键点检测项目工程代码,包含手部关键点检测的训练代码train.py和推理测试代码demo.py
- 提供高精度版本HRNet手部关键点检测训练和测试
- 提供轻量化模型LiteHRNet,以及Mobilenet-v2手部关键点检测训练和测试
- 根据本篇博文说明,简单配置即可开始训练:train.py
- 提供训练好的模型:HRNet-w32,LiteHRNet和Mobilenet-v2模型,配置好环境,可直接运行demo.py
- 测试代码demo.py支持图片,视频和摄像头测试
8.手部关键点检测C++/Android版本
- 手部关键点检测4:Android实现手部关键点检测(手部姿势估计)含源码 可实时检测https://blog.csdn.net/guyuealian/article/details/133277732
- 手部关键点检测5:C++实现手部关键点检测(手部姿势估计)含源码 可实时检测https://blog.csdn.net/guyuealian/article/details/133277748
Android手部关键点检测(手部姿势估计)APP Demo体验:https://download.csdn.net/download/guyuealian/88418582

相关文章:
手部关键点检测3:Pytorch实现手部关键点检测(手部姿势估计)含训练代码和数据集
手部关键点检测3:Pytorch实现手部关键点检测(手部姿势估计)含训练代码和数据集 目录 手部关键点检测3:Pytorch实现手部关键点检测(手部姿势估计)含训练代码和数据集 1. 前言 2.手部关键点检测(手部姿势估计)方法 (1)Top-Down(自上而下)方法 (2)Bot…...

服务日志性能调优,由log引出的巨坑
只有被线上服务问题毒打过的人才明白日志有多重要! 谁赞成,谁反对?如果你深有同感,那恭喜你是个社会人了:) 日志对程序的重要性不言而喻,轻巧、简单、无需费脑,程序代码中随处可见…...
【VR】【Unity】如何调整Quest2的隐藏系统时间日期
【背景】 网络虽然OK,但是Oculus Quest要连上商店还必须调整好系统时间,不过在Quest系统中,时间对用户是不可见的,本篇介绍调整的方法。 【方法】 打开SideQuest,没有的话先去下载一个。打开后先登录,如…...

C++之设计模式
C23种设计模式 https://blog.csdn.net/qq_40309341/article/details/120318957 设计模式可以同时使用多个。在软件开发中,通常会根据需求和问题的复杂性,结合多种设计模式来构建应用程序,以提高代码的可维护性、可扩展性和重用性。不同的设计…...

Django ORM查询
文章目录 1 增 -- 向表内插入一条数据2 删 -- 删除表内数据(物理删除)3 改 -- update操作更新某条数据4 查 -- 基本的表查询(包括多表、跨表、子查询、联表查询)4.1 基本查询4.2 双下划线查询条件4.3 逻辑查询:or、and…...

如何在CentOS 7中卸载Python 2.7,并安装3.X
Python是一种常用的编程语言,但是如果您不需要在服务器上使用Python 2.7,那么本文将详细介绍如何在CentOS 7上卸载Python 2.7。 一、检查Python版本 在卸载Python 2.7之前,必须检查系统上的Python版本。 在终端中执行以下命令:…...
10.17七段数码管单个多个(部分)
单个数码管的实现 第一种方式 一端并接称为位码;一端分别接收电平信号以控制灯的亮灭,称为段码 8421BCD码转七段数码管段码是将BCD码表示的十进制数转换成七段LED数码管的7个驱动段码, 段码就是LED灯的信号 a为1表示没用到a,a为…...
linux静态库与动态库
库是一种可执行的二进制文件,是编译好的代码。使用库可以提高开发效率。在Linux 下有静态库和动态库。 静态库在程序编译的时候会被链接到目标代码里面。所以程序在运行的时候不再需要静态库了。因此编译出来的体积就比较大。以 lib 开头,以.a 结尾。…...

LeetCode 面试题 10.03. 搜索旋转数组
文章目录 一、题目二、C# 题解 一、题目 搜索旋转数组。给定一个排序后的数组,包含n个整数,但这个数组已被旋转过很多次了,次数不详。请编写代码找出数组中的某个元素,假设数组元素原先是按升序排列的。若有多个相同元素ÿ…...

SpringCloudSleuth异步线程支持和传递
场景 在使用Sleuth做链路跟踪时,默认情况下异步线程会断链,需要进行代码调整支持。 调整内容 方式一 使用Async实现异步线程 开启异步线程池 EnableAsync SpringBootApplication public class LizzApplication {public static void main(String[] a…...
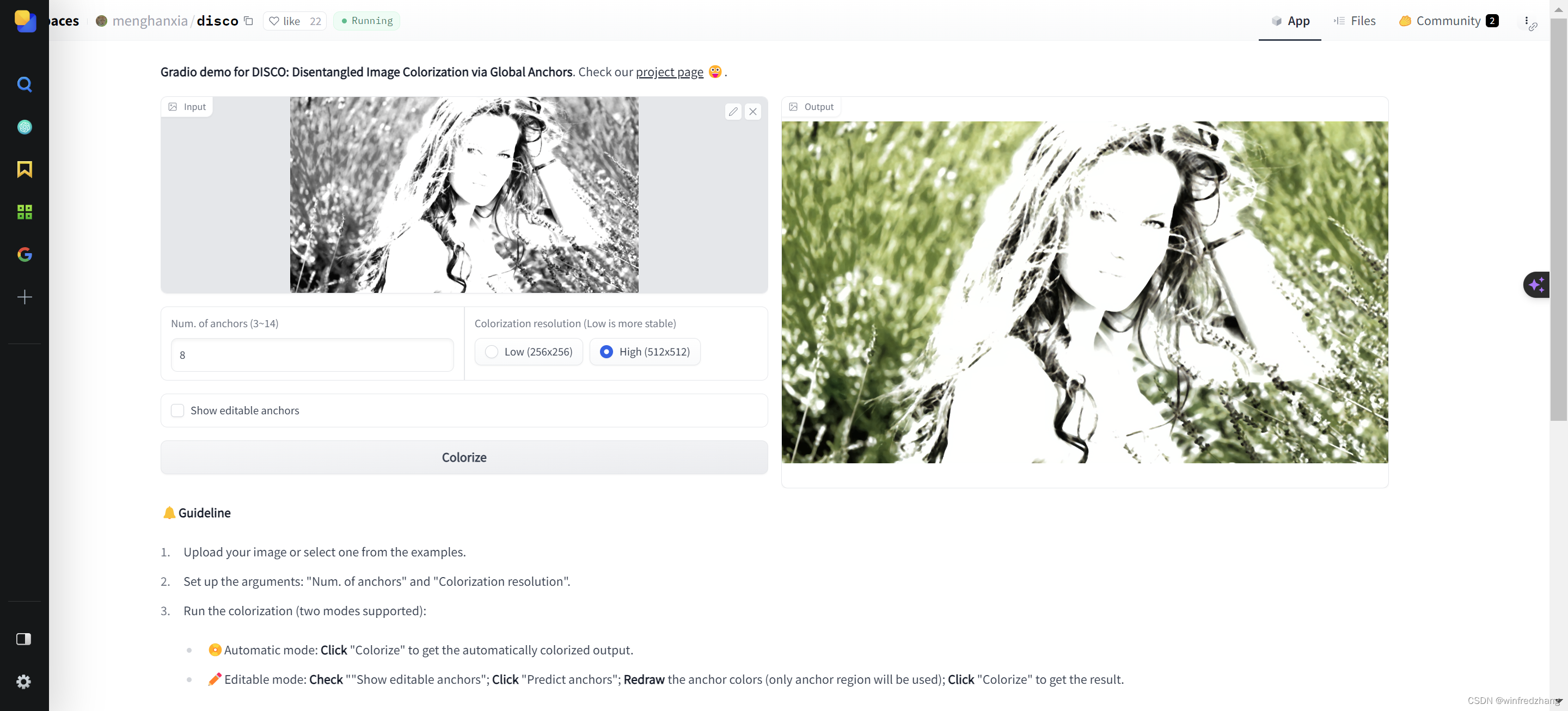
如何使用 Disco 将黑白照片彩色化
Disco 是一个基于视觉语言模型(LLM)的图像彩色化工具。它使用 LLM 来生成彩色图像,这些图像与原始黑白图像相似。 本文将介绍如何使用 Disco 将黑白照片彩色化。 使用 Disco 提供了一个简单的在线演示,可以用于测试模型。 访问…...

ChatGPT AIGC 制作大屏可视化分析案例
第一部分提示词prompt: 商品 价格 p1 13 p2 41 p3 42 p4 53 p5 19 p6 28 p7 92 p8 62 城市 销量 北京 69 上海 13 南京 18 武汉 66 成都 70 你现在是一名非常专业的数据分析师,请结合上述数据完成下列几件事情 1:第一部分数…...

2023年9款好用的在线流程图软件推荐!
随着互联网技术和基础设施的发展,人们能用上比过去更加稳定的网络,因此在使用各类工具软件时,越来越倾向于选择在线工具,或是推出了网页版的应用。 就流程图软件而言,过去想要绘制流程图,我们得在电脑上安…...

剑指Offer || 044.在每个树行中找最大值
题目 给定一棵二叉树的根节点 root ,请找出该二叉树中每一层的最大值。 示例1: 输入: root [1,3,2,5,3,null,9] 输出: [1,3,9] 解释:1/ \3 2/ \ \ 5 3 9 示例2: 输入: root [1,2,3] 输出: [1,3] 解释:1/ \2 3示例3ÿ…...

ESP32网络开发实例-UDP数据发送与接收
UDP数据发送与接收 文章目录 UDP数据发送与接收1、UDP简单介绍2、软件准备3、硬件准备4、代码实现本文将详细介绍在Arduino开发环境中,如何实现ESP32通过UDP协议进行数据发送与接收。 1、UDP简单介绍 用户数据报协议 (UDP) 是一种跨互联网使用的通信协议,用于对时间敏感的传…...

液压自动化成套设备比例阀放大器
液压电气成套设备的比例阀放大器是一种电子控制设备,用于控制液压动力系统中的液压比例阀1。 比例阀放大器通常采用电子信号进行控制,以控制比例阀的开度和流量,以实现液压系统的可靠控制。比例阀放大器主要由以下组成部分: 驱动…...

专业144,总分440+,上岸西北工业大学827西工大信号与系统考研经验分享
我的初试备考从4月末,持续到初试前,这中间没有中断。 总的时间分配上,是数学>专业课>英语>政治,虽然大家可支配时间和基础千差万别,但是这么分配是没错的。 数学 时间安排:3月-7月:…...

JQuery - template.js 完美解决动态展示轮播图,轮播图不显示问题
介绍 在JQuery中,使用template.js把轮播图的图片渲染到页面后,发现无法显示。 解决方案 首先,打开控制台发现,图片dom是生成了的,排除dom的缺失其次,换了一个插件Swiper,发现效果一样,排除插件的沦丧把动态数据换成假数据,...

CC2540和CC2541的区别简单解析
CC2541理论上是CC2540的精简版,去除了USB接口,增加了1个HW1C接口。 CC2540集成了2.4GHz射频收发器,是一款完全兼容8051内核的无线射频单片机,它与蓝牙低功耗协议栈共同构成高性价比、低功耗的片上系统(SOC)…...
-- Stream的collect()与Collectors的联合运用)
Java8 新特性之Stream(八)-- Stream的collect()与Collectors的联合运用
目录 1. collect()的 收集 作用 2. collect()的 统计 作用 3. collect()的 分组 作用 4. collect()的 拼接 作用...

Rust嵌入式开发实战:开源机械爪控制库openclaw-rs架构解析与应用
1. 项目概述:当Rust遇上开源机械爪最近在逛GitHub的时候,偶然发现了一个挺有意思的项目——neul-labs/openclaw-rs。光看名字,你大概能猜到它是个用Rust语言写的、跟机械爪(Claw)相关的开源项目。没错,这正…...

终极指南:如何用FFXIV TexTools模组管理器轻松定制最终幻想14外观
终极指南:如何用FFXIV TexTools模组管理器轻松定制最终幻想14外观 【免费下载链接】FFXIV_TexTools_UI 项目地址: https://gitcode.com/gh_mirrors/ff/FFXIV_TexTools_UI FFXIV TexTools模组管理器是《最终幻想14》玩家社区中最强大的外观定制工具ÿ…...

树莓派驱动MAX31855热电偶传感器:从SPI通信到高精度测温实践
1. 项目概述:从热电偶到Python读数在嵌入式开发、工业监控或者任何需要精确测温的项目里,热电偶(Thermocouple)往往是工程师们的首选传感器。它结构简单、皮实耐用,而且测温范围能从零下两百多度一直覆盖到上千度&…...

终极指南:如何用Snipe-IT免费开源系统解决企业IT资产追踪难题
终极指南:如何用Snipe-IT免费开源系统解决企业IT资产追踪难题 【免费下载链接】snipe-it A free open source IT asset/license management system 项目地址: https://gitcode.com/GitHub_Trending/sn/snipe-it 想象一下,你的公司有500台笔记本电…...

AI 写代码编译器却只给人看,Zero:一门给 Agent 设计的系统编程语言,让一切副作用显式可见
Vercel 的实验室最近放出一个叫 Zero 的东西,一门自称"给 Agent 用的系统编程语言",2026 年 5 月刚发布 v0.1.1,编译器用 C 写的,文件后缀是 .0。单凭这个后缀,就知道这是一门不肯对任何既有生态妥协的新语言…...

Cursor AI编程助手扩展包:定制化规则提升代码生成质量与效率
1. 项目概述:一个为 Cursor 编辑器量身定制的 AI 编程助手扩展包如果你和我一样,日常重度依赖 Cursor 这款“AI 驱动的代码编辑器”来提升开发效率,那你肯定不止一次地想过:能不能让 Cursor 更懂我?能不能让它在我写特…...

【技术解析】VadCLIP:如何让视觉语言模型“看懂”视频异常?
1. VadCLIP是什么?为什么视频异常检测需要它? 想象一下你正在监控室盯着几十块屏幕,突然有个画面闪过一个可疑行为——可能是打架、偷窃或者交通事故。传统监控系统要么依赖人工盯屏(容易疲劳漏检),要么使用…...
)
py每日spider案例之某guangdong省人mingzhengfu登录接口(难度高 )
加密入口: 逆向接口: sm2密钥接口: js逆向代码: const fs = require("fs"); const path = re...

暗黑破坏神2存档修改器终极指南:5分钟掌握Diablo Edit2完整教程
暗黑破坏神2存档修改器终极指南:5分钟掌握Diablo Edit2完整教程 【免费下载链接】diablo_edit Diablo II Character editor. 项目地址: https://gitcode.com/gh_mirrors/di/diablo_edit 你是否曾经在暗黑破坏神2中花费数小时刷装备却一无所获?是否…...

DLSS Swapper终极指南:一键管理游戏超采样文件,免费提升显卡性能
DLSS Swapper终极指南:一键管理游戏超采样文件,免费提升显卡性能 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper DLSS Swapper是一款专为NVIDIA、AMD和Intel显卡用户设计的智能超采样文件管理工…...