ROS小车研究笔记:二维SLAM建图简介与源码分析
ROS提供了现成的各类建图算法实现。如果只是应用的话不需要了解详细算法原理,只需要了解其需要的输入输出即可。
1 Gmapping
Gmapping使用粒子滤波算法进行建图,在小场景下准确度高,但是在大场地中会导致较大计算量和内存需求
Gmapping需要机器人提供深度信息,IMU信息,和里程计信息这三个中至少两个。利用这些输入信息gmapping算法可以输出栅格地图即小车在地图中定位

Gmapping订阅话题tf和scan。tf话题包含激光雷达和机器人基坐标系位置关系,scan包含激光雷达信息和IMU加速度信息。Gmapping可以通过话题和服务两种方式发布地图信息。其中map话题发布实时地图栅格数据,而服务dynamic_map只有在客户端发布请求是才会发布最新地图,相对于话题可以节省通信开支

对于odom里程计信息,Gmapping不用话题获取,而是通过TF树进行维护。其中 -> base_link为激光雷达相对base_link(默认的机器人基坐标系)位置,这一值一般为静态,在小车模型文件中定义好。
base_link ->odom为机器人位置相对于里程计原点坐标。其中odom坐标系位置为小车开始运行时里程计位置。通过速度积分得到base_link和odom的距离即可得到小车里程信息
map->odom 为地图中机器人位置关于里程计坐标。这里map和odom都为1不同的参考坐标系,odom是里程计测得的位置坐标,依靠小车自身移动速度积分得到,map为激光雷达测得的小车在地图上位置坐标。两者坐标系差距即为里程计的偏移
小车源码:
1 mapping.launch 启动建图的launch文件(只保留和gmapping相关内容)
<launch><arg name="mapping_mode" default="gmapping" doc="opt: gmapping,hector,cartographer,karto"/><!-- turn on lidar开启雷达 --><include file="$(find turn_on_wheeltec_robot)/launch/wheeltec_lidar.launch" /><!-- 开启gmapping建图算法 --><group if="$(eval mapping_mode == 'gmapping')"><include file="$(find turn_on_wheeltec_robot)/launch/include/algorithm_gmapping.launch" /><!-- 开启机器人底层相关节点 --><include file="$(find turn_on_wheeltec_robot)/launch/turn_on_wheeltec_robot.launch"><arg name="navigation" value="$(arg navigation)"/><arg name="is_cartographer" value="false"/><arg name="odom_frame_id" value="$(arg odom_frame_id)"/></include></group>
</launch>这里我们可以看到在开启gmapping 建图算法中,我们启动了文件turn_on_wheeltec_robot/launch/include/algorithm_gmapping.launch
该文件内容如下:
<launch><arg name="scan_topic" default="scan" /><arg name="base_frame" default="base_footprint"/><arg name="odom_frame" default="odom_combined"/><node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen"><param name="base_frame" value="$(arg base_frame)"/><param name="odom_frame" value="$(arg odom_frame)"/><param name="map_update_interval" value="0.01"/><param name="maxUrange" value="9.0"/><param name="maxRange" value="10.0"/><param name="sigma" value="0.05"/><param name="kernelSize" value="3"/><param name="lstep" value="0.05"/><param name="astep" value="0.05"/><param name="iterations" value="5"/><param name="lsigma" value="0.075"/><param name="ogain" value="3.0"/><param name="lskip" value="0"/><param name="minimumScore" value="30"/><param name="srr" value="0.01"/><param name="srt" value="0.02"/><param name="str" value="0.01"/><param name="stt" value="0.02"/><param name="linearUpdate" value="0.02"/><param name="angularUpdate" value="0.02"/><param name="temporalUpdate" value="-1.0"/><param name="resampleThreshold" value="0.25"/><param name="particles" value="8"/><param name="xmin" value="-5.0"/><param name="ymin" value="-4.0"/><param name="xmax" value="5.0"/><param name="ymax" value="4.0"/><param name="delta" value="0.05"/><param name="llsamplerange" value="0.01"/><param name="llsamplestep" value="0.01"/><param name="lasamplerange" value="0.005"/><param name="lasamplestep" value="0.005"/><remap from="scan" to="$(arg scan_topic)"/></node>
</launch>这里有大量和gmapping算法本身的参数,如果不了解算法底层原理可以直接使用默认值。我们可以对这些参数进行调优以使用不同应用场景
里程计tf坐标发布
(代码位置/turn_on_wheeltec_robot/launch/turn_on_wheeltec_robot.launch)
<!-- 发布用于建图、导航的TF关系与小车外形可视化 --><include file="$(find turn_on_wheeltec_robot)/launch/robot_model_visualization.launch" unless="$(arg repeat)"><arg name="car_mode" value="$(arg car_mode)"/><arg name="if_voice" value="$(arg if_voice)"/></include><!-- 扩张卡尔曼滤波 发布odom_combined到footprint的TF,即小车定位 使用cartographer算法时不使用该滤波算法--><include file="$(find turn_on_wheeltec_robot)/launch/include/robot_pose_ekf.launch" unless="$(arg repeat)"><arg name="is_cartographer" value="$(arg is_cartographer)"/></include></launch>
这里涉及到的robot_pose_ekf节点是ros中常用的卡尔曼滤波算法,用于对里程计坐标信息进去预处理以提高精度
2 Cartographer
Cartographer相比于Gmapping更适用于大场地的建图。其包含回环检测可以防止累积误差。并且Cartographer只依靠雷达建图,不需要里程计
Cartographer检测步骤分为两步,local scan和global scan。其中local scan为雷达实时检测,而global scan将local scan的检测结果汇总,进行回环检测,以减小地图误差
相关文章:
ROS小车研究笔记:二维SLAM建图简介与源码分析
ROS提供了现成的各类建图算法实现。如果只是应用的话不需要了解详细算法原理,只需要了解其需要的输入输出即可。 1 Gmapping Gmapping使用粒子滤波算法进行建图,在小场景下准确度高,但是在大场地中会导致较大计算量和内存需求 Gmapping需要…...
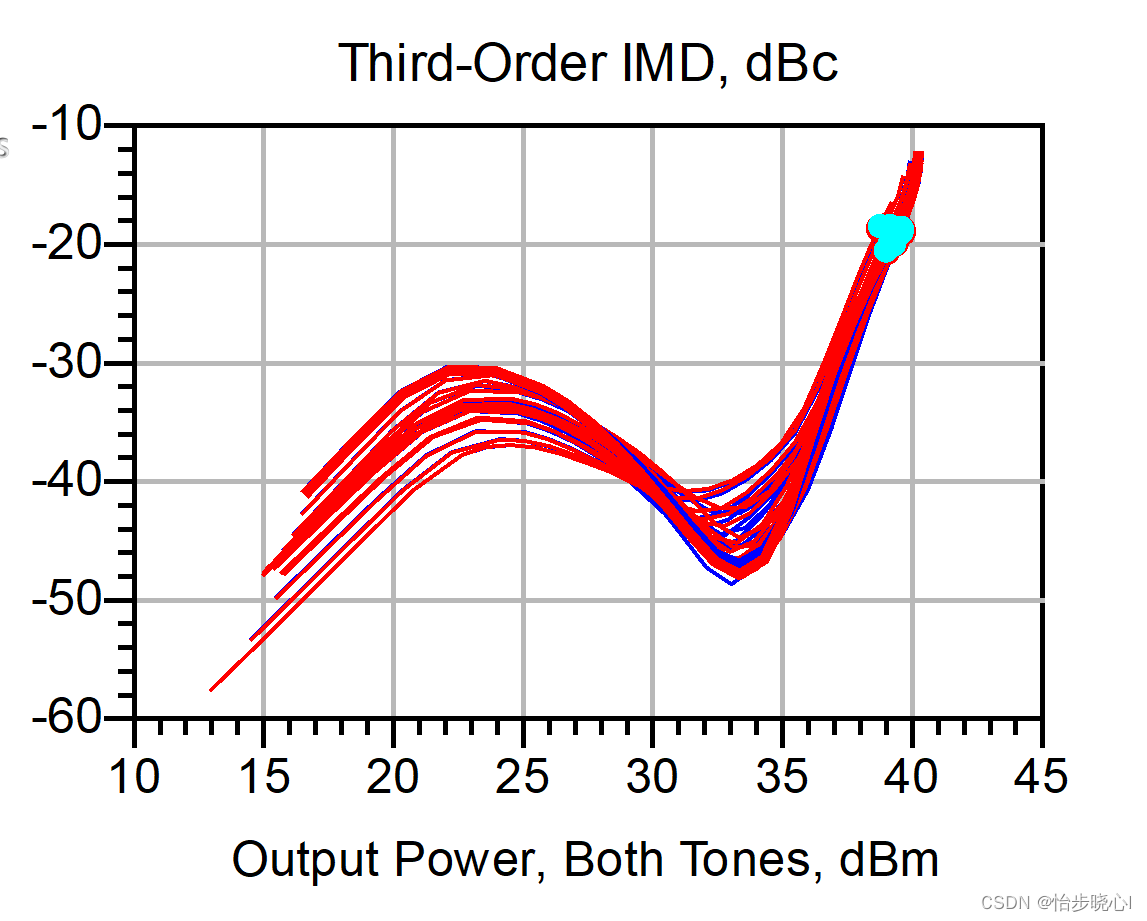
番外9:使用ADS对射频功率放大器进行非线性测试1(以IMD3测试为例)
番外9:使用ADS对射频功率放大器进行非线性测试1(以IMD3测试为例) 一般可以有多种方式对射频功率放大器的非线性性能进行测试,包括IMD3、ACPR、ACLR等等,其中IMD3的实际测试较为简单方便不需要太多的仪器。那么在ADS中…...
)
车载软件背景(留坑)
目前,车载软件已经成为汽车电子系统中不可或缺的一部分。随着汽车制造商不断增加车载软件的功能和性能,车载软件的市场规模也在不断扩大。据市场研究公司 Grand View Research 预测,到2025年,全球车载软件市场规模将达到190亿美元…...
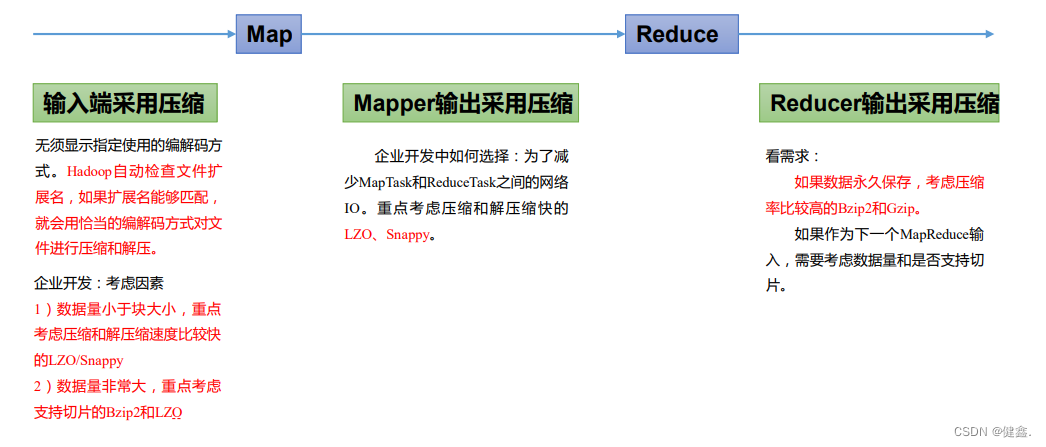
Hadoop-MapReduce
Hadoop-MapReduce 文章目录Hadoop-MapReduce1 MapRedcue的介绍1.1 MapReduce定义1.2 MapReduce的思想1.3MapReduce优点1.4MapReduce的缺点1.5 MapReduce进程1.6 MapReduce-WordCount1.6.1 job的讲解2 Hadoop序列化2.1 序列化的定义2.2 hadoop序列化和java序列化的区别3 MapRedu…...

ChatGPT来了,软件测试工程师距离失业还远吗?
小伙伴们前一段是不是都看到过ChatGPT的相关视频,那它到底是什么?对软件测试行业会有什么影响? 今天汇智妹就用一篇文章来给大家讲清楚。 一、ChatGPT是什么? 简单来说,ChatGPT是一款人工智能聊天机器人,…...

【项目实战】Linux服务管理 之 开启/关闭防火墙
一、service命令是什么? service命令用于对系统服务进行管理,比如 启动(start)停止(stop)重启(restart)查看状态(status) service命令本身是一个shell脚本…...
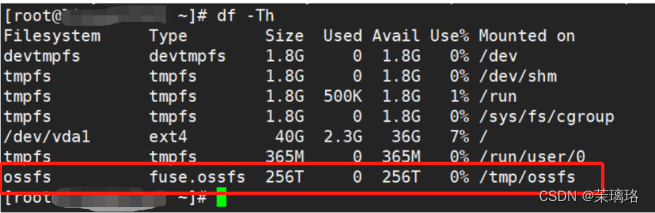
OSS存储使用之centOS系统ossfs挂载
以CentOS7系统为例 下载CentOS系统支持的ossfs工具的版本,以下载CentOS 7.0 (x64)版本为例,可以通过wget命令进行安装包的下载 wget http://gosspublic.alicdn.com/ossfs/ossfs_1.80.6_centos7.0_x86_64.rpm 也可以通过yum命令来进行安装包的下载 sud…...
配置)
【项目实战】SpringBoot多环境(dev、test、prod)配置
一、三套环境介绍 1.1 开发环境(dev) 开发环境是程序猿们专门用于开发的服务器,配置可以比较随意 为了开发调试方便,一般打开全部错误报告。 1.2 测试环境(test) 一般是克隆一份生产环境的配置 一个程序在测试环境工作不正常,那么肯定不能把它发布到生产机上。 有些…...
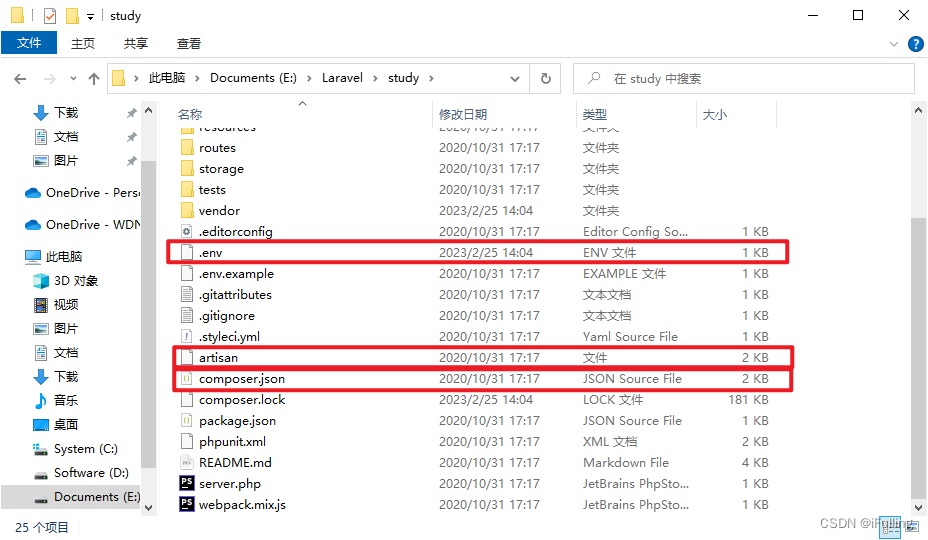
Laravel框架01:composer和Laravel简介
Laravel框架01:composer和Laravel简介一、Composer介绍二、创建Laravel项目三、Laravel目录结构四、Laravel启动方式一、Composer介绍 composer 是PHP中用来管理依赖关系的工具。类似于Javascript的NPM。composer官网:https://getcomposer.org/安装结束…...

【bug】Transformer输出张量的值全部相同?!
【bug】Transformer输出张量的值全部相同?!现象原因解决现象 输入经过TransformerEncoderLayer之后,基本所有输出都相同了。 核心代码如下, from torch.nn import TransformerEncoderLayer self.trans TransformerEncoderLayer…...
【LeetCode】剑指 Offer(8)
目录 题目:剑指 Offer 21. 调整数组顺序使奇数位于偶数前面 - 力扣(Leetcode) 题目的接口: 解题思路: 代码: 过啦!!! 题目:剑指 Offer 24. 反转链表 - …...
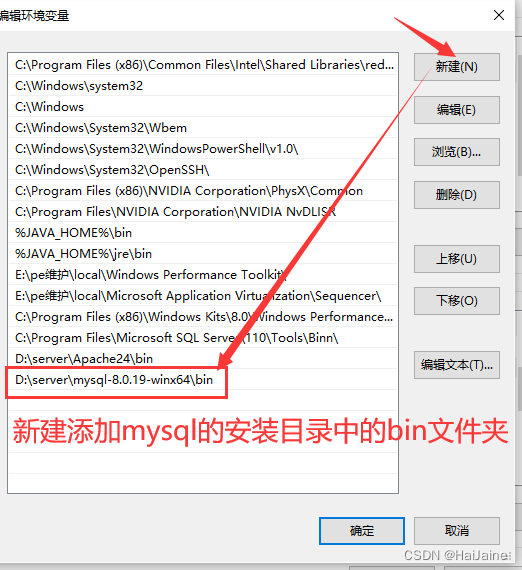
安装MySQL数据库
安装MySQL数据库 获取软件:https://dev.mysql.com/downloads/mysql/ 下载完成后进行解压操作 若安装目录里没有my.ini配置文件,则需要新建一个my.ini的配置文件。 编辑my.ini配置文件,将配置文件中的内容修改成下面内容 [client] # 设置…...
手写Android性能监测工具,支持Fps/流量/内存/启动等
App性能如何量化:如何衡量一个APP性能好坏?直观感受就是:启动快、流畅、不闪退、耗电少等感官指标,反应到技术层面包装下就是:FPS(帧率)、界面渲染速度、Crash率、网络、CPU使用率、电量损耗速度等…...
Java IO)
Java知识复习(三)Java IO
1、IO流 IO流:数据传输过程类似于水流,故称IO流 IO流的的40多个类都是从4个抽象类基类中派生出来的,前者是字节,后者是字符 InputStream/Reader:所有的输入流的基类OutputStream/Writer:所有输出流的基类 2、字符流和字节流的区…...

Java版分布式微服务云开发架构 Spring Cloud+Spring Boot+Mybatis 电子招标采购系统功能清单
一、立项管理 1、招标立项申请 功能点:招标类项目立项申请入口,用户可以保存为草稿,提交。 2、非招标立项申请 功能点:非招标立项申请入口、用户可以保存为草稿、提交。 3、采购立项列表 功能点:对草稿进行编辑&#x…...

2023年全国最新会计专业技术资格精选真题及答案5
百分百题库提供会计专业技术资格考试试题、会计考试预测题、会计专业技术资格考试真题、会计证考试题库等,提供在线做题刷题,在线模拟考试,助你考试轻松过关。 1.某股份有限公司对外公开发行普通股2 000万股,每股面值为1元&#x…...

软工个人作业 -- 分析与提问
软工个人作业 – 分析与提问 项目内容这个作业属于哪个课程2023 年北航软件工程这个作业的要求在哪里个人作业-阅读和提问我在这个课程的目标是了解软件工程的方法论、获得软件项目开发的实践经验、构建一个具有我的气息的艺术品这个作业在哪个具体方面帮助我实现目标初步了解…...

C++类和对象到底是什么意思?
C++是一门面向对象的编程语言,理解 C++,首先要理解类(Class)和对象(Object)这两个概念。 C++ 中的类(Class)可以看做C语言中结构体(Struct)的升级版。结构体是一种构造类型,可以包含若干成员变量,每个成员变量的类型可以不同;可以通过结构体来定义结构体变量,每个…...

【电路设计】常见电路及相关解释
前言 在接触电路设计过程中,往往需要用到一些常见的电路,但是临时查找又太浪费时间,因此,想总结一些常见电路的分析方式。 1 RC电路充放电公式 一般的RC电路如下图所示。 其充放电公式如下所示。 VtV0(V1−V0)(1−e−tRC)tRCln…...

【一天一门编程语言】Linux 实用命令大全
Linux 实用命令大全 用 markdown 格式输出答案。 不少于1000字。细分到2级目录。 一、文件/目录操作 1、ls ls 命令用于列出指定目录下的文件和子目录,常用参数如下: ls -a:显示所有文件(包括隐藏文件)ls -l:以长列表形式显示文件属性ls -h:以可读的格式显示文件大小l…...

前 DeepMind 研究员反思:评测,而非算力或数据,才是下一阶段的瓶颈
一线后训练研究员的技术随笔与动态评测管线启示当你还在为某项主流基准的分数微涨而讨论时,模型可能已悄悄学会“只说真话但战略性隐瞒”。前 Google DeepMind 高级研究员 Lun Wang 在近期的技术长文中抛出一个反直觉观察:如果下一代大模型跨进了全新的能…...

新手网站建设教程:域名、主机、建站方式一次讲清楚
在数字化时代,拥有一个属于自己的网站,无论是用于展示个人作品、创建企业官网,还是开启电商副业,都是一项极具价值的长线投资。但对于零基础的新手来说,搭建网站似乎总是隔着“代码”这座大山。其实,随着技…...

告别手忙脚乱找字幕:Jellyfin智能字幕插件MaxSubtitle完全指南
告别手忙脚乱找字幕:Jellyfin智能字幕插件MaxSubtitle完全指南 【免费下载链接】jellyfin-plugin-maxsubtitle 一个 Jellyfin 中文字幕插件(未来可以不局限中文) 项目地址: https://gitcode.com/gh_mirrors/je/jellyfin-plugin-maxsubtitle…...

GD32F427以太网通信避坑指南:LAN8720的REF_CLK模式选择与SMI管理接口配置
GD32F427以太网通信避坑指南:LAN8720的REF_CLK模式选择与SMI管理接口配置 在嵌入式系统开发中,以太网通信的稳定性往往决定着整个产品的可靠性。GD32F427作为国产MCU的优秀代表,其内置的ENET控制器配合LAN8720 PHY芯片能够实现高效的网络通信…...

你的Nmap脚本库该更新了!手把手教你管理、调试与编写自定义NSE脚本
从使用者到创造者:Nmap脚本引擎(NSE)深度管理指南 在渗透测试和安全评估领域,Nmap早已超越了简单的端口扫描工具定位,其强大的脚本引擎(NSE)使其成为网络安全专业人员的瑞士军刀。但大多数用户仅停留在基础脚本调用层面,未能充分释…...

如何在5分钟内免费安装DeepL Chrome翻译插件:终极指南
如何在5分钟内免费安装DeepL Chrome翻译插件:终极指南 【免费下载链接】deepl-chrome-extension A DeepL Translator Chrome extension 项目地址: https://gitcode.com/gh_mirrors/de/deepl-chrome-extension 你是否厌倦了生硬的机器翻译?想要在浏…...

如何在Windows系统中创建虚拟游戏手柄?vJoy开源项目完全指南
如何在Windows系统中创建虚拟游戏手柄?vJoy开源项目完全指南 【免费下载链接】vJoy Virtual Joystick 项目地址: https://gitcode.com/gh_mirrors/vj/vJoy 你是否曾因缺少物理游戏手柄而无法体验某些经典游戏?或者需要为专业软件创建自定义控制方…...

大学英语四级试卷历年真题及答案PDF电子版百度网盘
大学英语四级备考必备历年真题合集(2015年6月-2025年12月),高清 PDF 电子版含完整试卷与详细答案解析,以及配套听力音频,题型齐全答案详实,可下载打印刷题,吃透真题考点,高效冲刺顺利…...

制造业数据架构设计顶层规划方案:数据资源规划、基础数据管理、数据分析应用、数据治理体系 、实施路线图
该方案针对企业数据架构空白、缺乏统一模型与治理体系的问题,提出了以数据资源规划、主数据与元数据管理、数据分析应用及数据治理为核心的整体架构。通过明确数据分布与流向、构建企业级数据仓库与治理平台,最终实现数据驱动决策与业务规范化࿰…...

视频高清直播点播/音视频点播/云点播/云直播EasyDSS交互升级解锁大型活动直播新体验
在数字化时代,大型活动直播已从“可选”变为“必需”,无论是政企发布会、行业峰会,还是跨区域学术论坛,都需要一套兼顾稳定、安全与高效的直播解决方案。EasyDSS私有化视频会议系统凭借高并发、低延迟的核心优势站稳市场ÿ…...