【趣味随笔】农业机器人的种类与发展前景
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨
📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】
📢:文章若有幸对你有帮助,可点赞 👍 收藏 ⭐不迷路🙉
📢:内容若有错误,敬请留言 📝指正!原创文,转载请注明出处
文章目录
- 一、农业机器人简介
- 二、农业机器人种类
- 2.1 采摘机器人
- 2.2 喷药机器人
- 2.3 耕种、除草机器人
- 2.4 表型获取机器人
- 三、发展前景
- 3.1 国外发展现状
- 3.2 国内发展现状
- 3.2 总结
一、农业机器人简介
📢::农业机器人是指在田间、山间等环境下从事作物表型、农情巡检、病虫害检测、杂草去除、土地平整、作物采摘等任务的自主作业装备,其关键技术包括精准导航、机器视觉、智慧决策、自主行走和智能作业控制等。
📢::农业机器人是一种新兴的智能农业设备,它是一种机器,是机器人在农业生产中的运用。这种机器人可由不同的程序软件控制,以适应各种作业,能感觉并适应作物种类或环境变化,具有检测(如视觉等)和演算等人工智能的新一代无人自动操作机械。
二、农业机器人种类
2.1 采摘机器人
大田收获类机器人是指通过机器视觉等技术识别与定位、选择作业对象并依据对象特征实现差异化精准收获控制的机器人,它关注无法大规模自动化采收的对象,同时注重收获作业的高效性和适应性,弥补了农机装备在精细选择性收获作业方面装备的不足。其主要技术难点是高效、低损收获末端执行器设计与控制。
翟长远等人将无人驾驶技术、机器视觉与甘蓝收获技术结合,研制了大田甘蓝自主收获机器人(图7a),通过北斗系统定位种植行后将采收臂与甘蓝对齐、机器视觉微调后完成对行采收作业,同时通过传输通道将甘蓝运至协同运输的自动行驶车辆。美国CROO Robotics研发了大田高垄草莓收获机器人(图7b),利用草莓与茎叶的位置差异,设计了柔性茎叶和草莓果分离末端执行器和开合式硅爪采收轮,通过旋转光学相机识别定位目标草莓,实现了快速采收、输送和集箱。

2.2 喷药机器人
喷药机器人是农业机器人的一种,它通过精准的喷洒技术,帮助农民在种植作物的过程中施放适量的农药,旨在保护作物并提高产量。这种机器人的出现,解决了传统施药机械工作效率低和连续喷施作业易造成农药浪费、环境污染等问题。
喷药机器人的工作原理是这样的:在果园内,沿着喷药作业路径铺设感应电缆,对于栽苹果树这样的果园,会把感应电缆铺设在地表或者是地下(大约30米深的地方),而对于像栽种葡萄等的果园,则把感应电缆架设在空中(地上约150~200米处)。考虑到果树的距离,相邻电缆的距离最小为1.5米左右。
此外,智能喷药机器人还具有很多先进的功能。例如,它可以通过人员遥控完成果园高精度地图的创建,通过智能规划算法、多传感融合的感知算法和高精度位置控制算法可以实现自主的果园巡检和无人打药任务。
目前,全球农业机器人市场的重点主要集中在无人驾驶拖拉机、喷药无人机和挤奶机器人等领域,其中无人驾驶拖拉机和喷药无人机是我国农业机器人的主力军。随着科技的发展,我们可以预见,未来的农业将更加智能化,喷药机器人的应用也将越来越广泛。


2.3 耕种、除草机器人
耕种机器人是农业机器人的一种,主要负责在田间地头里自动播种、间苗、施肥等任务。例如,北大荒、碧桂园、博创联动等公司积极将机器人自动控制和远程联网等技术应用于农机装备,把农机变成智能联网机器人,提升农机的作业一致性及土地利用率,并且覆盖农业播种到收割全环节。
目前,全球农业机器人市场的重点主要集中在无人驾驶拖拉机、喷药无人机和挤奶机器人等领域。以美国公司Blue River Technology开发的“FarmWise”人工智能农业机器人为例,这种智能自主机器人可以解决农田中的杂草问题,为农民节省工作时间和金钱,并为消费者提供更健康的农产品。

2.4 表型获取机器人
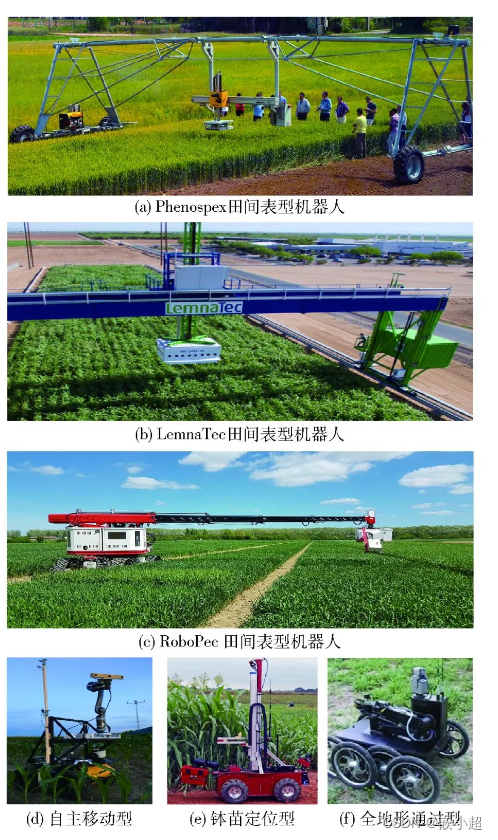
作物表型信息获取机器人主要完成作物发育表型、作物长势、病虫草害、土壤理化性质等信息采集,可用于品种选育、田间管理、适时收获等作业决策。其主要技术难点在于种类繁多的高性价比机载传感器研发,以及田间高效巡检平台自适应快速稳定行走设计问题。
荷兰Phenospex、德国LemnaTec和法国RoboPec公司开发了龙门式和悬臂式植物表型机器人,通过叠加3D和多光谱信息准确测量最大植物高度、3D叶面积、叶片角度、光穿透深度等形态参数,具有高精准度、完全自动化、不受照明条件影响、可实现昼夜扫描等优点,实现了每天10000平方米的高通量分析(图1a~1c)。SHAFIEKHANI、MUELLER-SIM和BAO等人研制了田间移动式作物表型分析机器人,实现了作物茎秆强度及几何形态的高通量测量(图1d、1e)。上海交通大学张伟军等开发了全地形适应性田间作物巡检机器人,采用8轮错位构型与主被动复合柔性驱控算法,保障了行进过程中机载激光传感器和鱼眼相机图像获取的稳定性。
三、发展前景
具体来说,全球农业机器人的需求正在快速增长,预计到2030年将达到360亿台。各类农业机器人也在不断涌现并得到应用,比如施肥机器人、菜田除草机器人、采摘柑桔机器人、采摘蘑菇机器人、分检果实机器人、番茄收获机器人和采摘草莓机器人等。还有一些特殊功能的机器人,例如Hortibot能够自动识别并清除多达20余种杂草的除草机;AgBot Ⅱ则是一种“强智能”机器人,根据田间状况,为农耕者提供除草剂、杀虫剂、肥料以及用水的建议。
3.1 国外发展现状
近10年来,美国、英国、德国、加拿大、日本、韩国等农业发达国家高度关注智慧农业的发展,从国家层面进行战略部署,积极推进农业物联网、农业传感器、农业大数据、农业机器人、农业区块链等智慧农业关键技术的创新发展。
2015年,加拿大联邦政府预测与策划组织发布了《MetaScan3:新兴技术与相关信息图》,指出土壤与作物感应器(传感器)、家畜生物识别技术、农业机器人在未来5~10年将颠覆传统农业生产方式。
2015年,日本启动了“基于智能机械+智能IT的下一代农林水产业创造技术”项目,核心内容是“信息化技术+智能化装备”。2017年,欧洲农机工业学会提出了“农业4.0(Farming4.0)”计划,强调智慧农业是未来欧洲农业发展的方向。
2018年,美国科学院、美国工程院和美国医学科学院联合发布《面向2030年的食品和农业科学突破》报告,重点突出了传感器、数据科学、人工智能、区块链等技术发展方向,积极推进农业与食品信息化。美国国家科学技术委员会(National science and technology council,NSTC)在“国家人工智能研发战略计划”中,将农业作为人工智能优先应用发展的第10个领域,资助农业人工智能科技的中长期研发;美国农业部“2018—2022年战略规划”中,突出了农业人工智能、自动化与遥感技术的应用。
根据国际咨询机构Research and Markets分析,2019年全球智慧农业市值167亿美元,2027年将达到292亿美元,2021-2027年全球智慧农业市值年复合增长率(Compound annual growth rate,CAGR)将达到9.7%。
3.2 国内发展现状
我国的农业机器人行业正在快速发展。近年来,随着工业化进程的不断加快,我国农业机械化水平显著提高,农业机器人在农业生产中的地位越来越重要。据预测,2019年我国农业机器人市场规模从2015年的1.24亿元增长至4.97亿元,预计到2023年,这一数字将增长至8.21亿元。其中,行走系列农业机器人规模为6.19亿元,机器手系列机器人及其他规模为2.02亿元。
此外,全球农业机器人市场的重点主要集中在无人驾驶拖拉机、喷药无人机和挤奶机器人等领域,其中无人驾驶拖拉机和喷药无人机是我国农业机器人的主力军。有机构预测,2020年我国农用机器人市场规模将达到6.05亿元,2022年农用机器人市场规模达到11.46亿元,预计到2025年全球农业机器人市场总量约为93亿台,到2030年增长近4倍,达到360亿台。
3.2 总结
目前,国际上以美国为代表的大田智慧农业、以德国为代表的智慧养殖业、以荷兰为代表的智能温室生产以及以日本为代表的小型智能装备业均取得巨大进步,形成了相对成熟的技术和产品,而且还形成了商业化的发展模式,为我国发展智慧农业提供了可借鉴的经验。
目前,农业机器人正在全球范围内得到广泛应用和发展。随着大数据及技术支撑型农业的兴起,越来越多的农业机器人开始出现在大众的视野中。拥有先进人工智能(AI)技术和内置分析系统的机器人正被广泛应用于各种场合,从农作物和牛群的管理,到奶牛管理、土壤监测和整体农业产量优化等。在这些技术的辅助下,农业生产实现了可持续发展。
总的来说,农业机器人的发展和应用正在深刻改变着传统农业的生产方式,使得农业生产更加高效、环保和精准。
相关文章:
【趣味随笔】农业机器人的种类与发展前景
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨ 📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】 📢:文章若有幸对你有帮助,可点赞 👍…...

使用CountdownLatch和线程池批量处理http请求,并处理响应数据
背景和问题 背景:最近项目的一个接口数据,需要去请求其他多个服务器的数据,然后统一返回; 问题点:如果遍历所有的服务器地址,然后串行请求就会出现请求时间过长,加入需要请求十个服务器&…...

记录--怎么写一个可以鼠标控制旋转的div?
这里给大家分享我在网上总结出来的一些知识,希望对大家有所帮助 说在前面 鼠标控制元素旋转在现在也是一个很常见的功能,让我们从实现div元素的旋转控制开始来了解元素旋转的具体原理和实现方法吧。 效果展示 体验地址 code.juejin.cn/pen/7290719… 实现…...

JVM第十八讲:调试排错 - Java 问题排查之工具单
调试排错 - Java 问题排查之工具单 程序员想要有更好的发展,排查问题的能力一定得加强。举个例子:cpu100% 怎么排查,线上接口逐渐变慢了该怎么排查?慢查询该如何治理?你的思路是啥?本文是JVM第十八讲&#…...
)
JAVA基础-正则表达式(12)
目录 Java 正则表达式正则表达式实例正则表达式语法 Matcher 类的方法索引方法查找方法替换方法start 和 end 方法 Java 正则表达式 正则表达式定义了字符串的模式。 正则表达式可以用来搜索、编辑或处理文本。 正则表达式并不仅限于某一种语言,但是在每种语言中有细…...

[论文笔记]GPT-1
引言 今天带来论文Improving Language Understanding by Generative Pre-Training的笔记,它的中文题目为:通过生成式预训练改进语言理解。其实就是GPT的论文。 自然语言理解可以应用于大量NLP任务上,比如文本蕴含、问答、语义相似和文档分类。虽然无标签文本语料是丰富的,…...
)
【3D 图像分割】基于 Pytorch 的 VNet 3D 图像分割1(综述篇)
在上一个关于3D 目标的任务,是基于普通CNN网络的3D分类任务。在这个任务中,分类数据采用的是CT结节的LIDC-IDRI数据集,其中对结节的良恶性、毛刺、分叶征等等特征进行了各自的等级分类。感兴趣的可以直接点击下方的链接,直达学习&…...
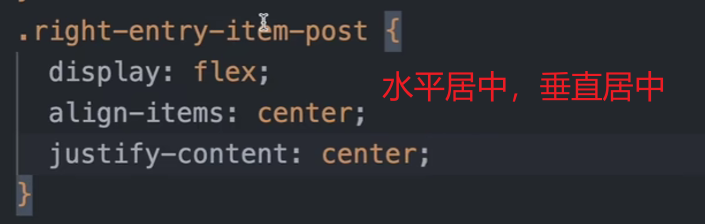
css之Flex弹性布局
文章目录 🐕前言:🏨定义flex容器 display:flex🏨在flex容器中子组件进行排列🪂行排列 flex-direction: row🪂将行排列进行翻转排列 flex-direction: row-reverse🏅按列排列 flex-direction: col…...

web.xml配置详解
在Java Web应用程序中,web.xml是一个XML配置文件,用于定义和配置Servlet、过滤器、监听器和其他Web应用程序组件的行为和属性。web.xml文件通常位于Web应用程序的WEB-INF目录下,用于描述Web应用程序的部署信息和配置。以下是一些web.xml配置的…...

关于我学习Go语言在CSDN分享的心得体会
最近我一直在学习Go语言,并通过CSDN平台分享我的学习心得和体会。在这篇博客中,我将与大家分享我在学习Go语言过程中的经验和收获。希望通过这篇博客能够帮助其他Go语言初学者更好地掌握这门语言,并与广大Go语言爱好者进行交流和互动。 选择…...

Java类的Builder应用以及使用@Data和@Builder高效应用Builder
⭐Java Builder模式:是Java设计模式之一,它属于对象创建型模式,是将一个复杂对象的构建与它的表示分离,使得同样的构建过程可以创建不同的表示。 结论一:使用lombok的Data和Builder注解构建Java类的Builder简洁高效&am…...
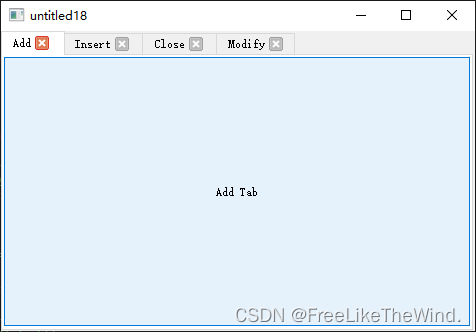
【Qt控件之QTabWidget】介绍及使用
描述 QTabWidget类提供了一个带有选项卡的小部件堆栈。 选项卡小部件提供了一个选项卡栏(参见QTabBar)和一个“页面区域”,用于显示与每个选项卡相关联的页面。默认情况下,选项卡栏显示在页面区域的上方,但可以使用…...
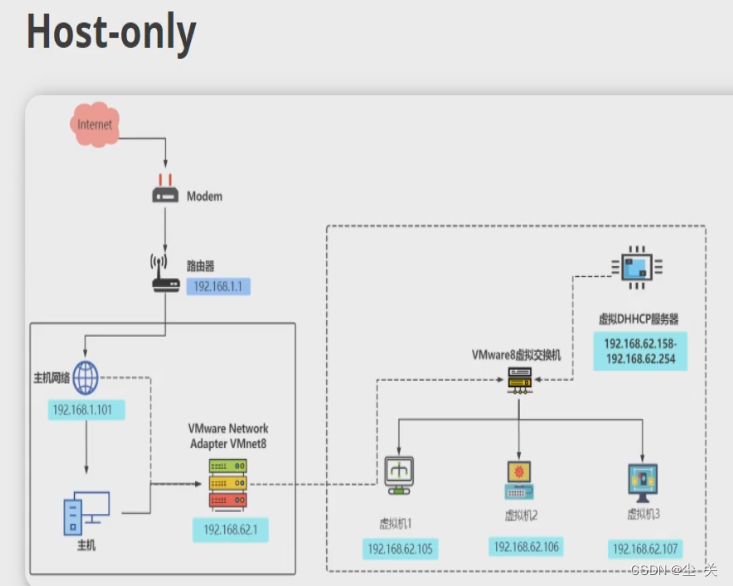
Linux实战——网络连接模式的三种模式
Linux可以分为三种网络模式: 桥接模式 (vmnet0) 仅主机模式 (vmnet1) NAT模式 (vmnet8) 当我们下载了vmware之后,在电脑会出现两个虚拟网卡,VMware Network Adapter VMnet1、VMware Network Adapter VMnet8。 可以通过查找 控…...
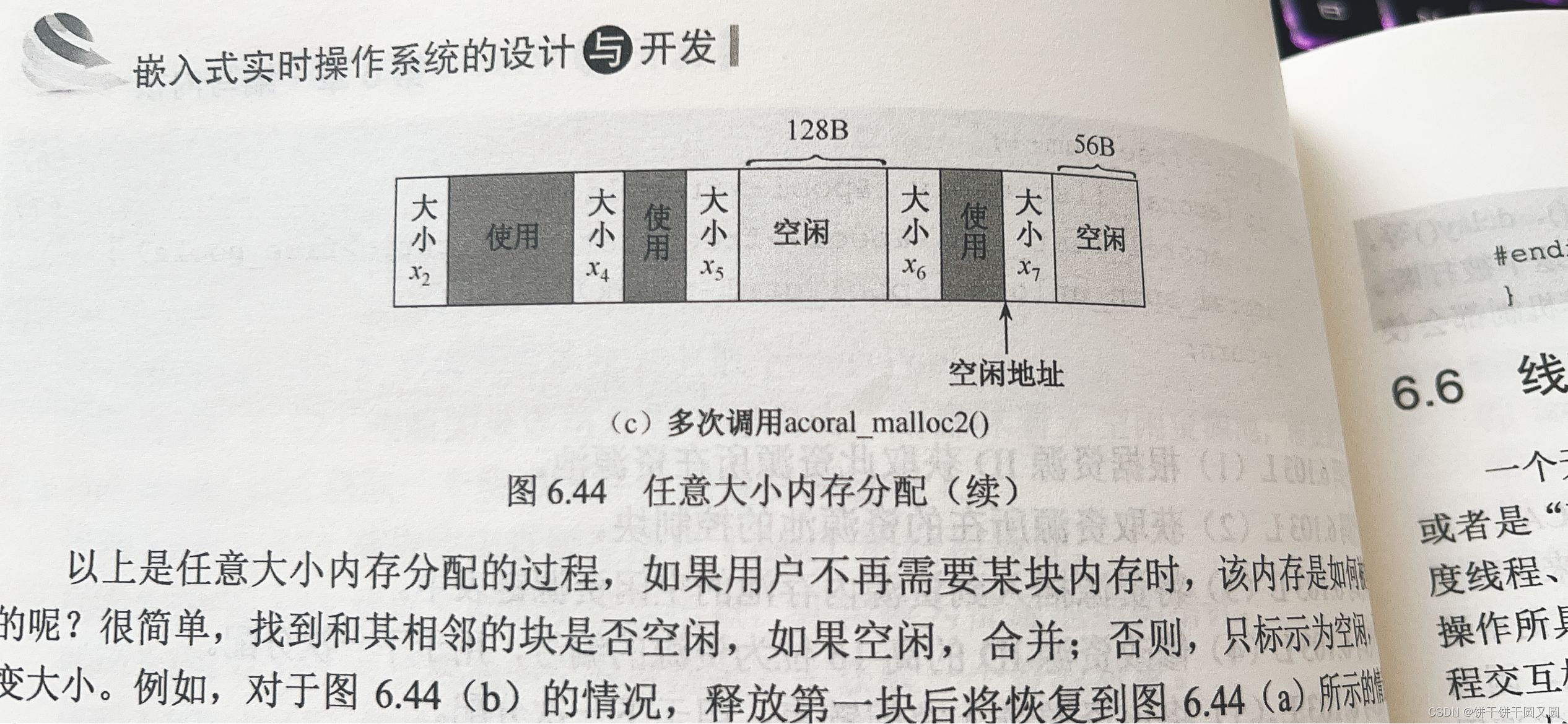
嵌入式实时操作系统的设计与开发(任意大小的内存管理)
任意大小的内存管理是根据用户需要为其分配内存,即用户需要多大内存就通过acoral_malloc2()为之分配多大内存,同时每块分配出去的内存前面都有一个控制块,控制块里记录了该块内存的大小。 同时未分配出去的内存也有一个控制块,寻…...
文件读取结束的判定
大家好啊,我们今天来补充文件操作的读取结束的判定。 被错误使用的feof 牢记:在文件读取过程中,不能用feof函数的返回值直接用来判断文件的是否结束而是应用于当文件读取结束的时候,判断是读取失败结束,还是遇到文件尾…...

《基于 Vue 组件库 的 Webpack5 配置》9.module.exports 可为数组类型且注意编译顺序
module.exports常见是对象类型,其实也可用数组类型;注意编译顺序,从后往前 编: 也就是说先编 another.js,再编 index.js;所以代码第 9 行不能设置为 true,仅在第一次,也就是代码第19…...
device管理)
CUDA学习笔记(四)device管理
本篇博文转载于https://www.cnblogs.com/1024incn/tag/CUDA/,仅用于学习。 device管理 NVIDIA提供了集中凡是来查询和管理GPU device,掌握GPU信息查询很重要,因为这可以帮助你设置kernel的执行配置。 本博文将主要介绍下面两方面内容&…...

【算法练习Day25】 重新安排行程N 皇后 解数独
📝个人主页:Sherry的成长之路 🏠学习社区:Sherry的成长之路(个人社区) 📖专栏链接:练题 🎯长路漫漫浩浩,万事皆有期待 文章目录 重新安排行程N 皇后解数独总…...
软考-访问控制技术原理与应用
本文为作者学习文章,按作者习惯写成,如有错误或需要追加内容请留言(不喜勿喷) 本文为追加文章,后期慢慢追加 by 2023年10月 访问控制概念 访问控制是计算机安全的一个重要组成部分,用于控制用户或程序如…...

优测云测试平台 | 有效的单元测试
一、前言 本文作者提出了一种评价单元测试用例的质量的思路,即判断用例是否达到测试的“四大目标”。掌握识别好的用例的能力,可以帮助我们高效地写出高质量的测试用例。 评判冰箱的好坏,并不需要有制造一台冰箱的能力。在开始写测试用例之…...

OpenClaw 微信通道搭建方法 三种部署模式详细讲解
一、方案背景与核心价值 在微信私域运营与自动化客服场景中,OpenClaw 可以打通微信客户端与后端服务的通信链路,降低接入门槛,支持本地、云端等多种环境部署,兼顾数据安全与连接稳定性。本文围绕部署细节与故障排查逻辑展开&…...

WarcraftHelper终极指南:如何让魔兽争霸3在现代Windows系统完美运行
WarcraftHelper终极指南:如何让魔兽争霸3在现代Windows系统完美运行 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为经典游戏魔兽争…...

Spark大数据分析实战【1.1】
2.3 Spark编译 用户可以通过Spark的默认构建工具SBT进行源码的编译和打包。当用户需要对源码进行二次开发时,则需要对源码进行增量编译,通过下面的方式读者可以实现编译和增量编译。 (1)克隆Spark源码 可通过克隆的方式克隆Spark源码,如图2-9所示。 git clone https:/…...

深入理解RAG:如何让大语言模型获取实时知识
深入理解RAG:如何让大语言模型获取实时知识 RAG的核心概念与价值 RAG(Retrieval-Augmented Generation,检索增强生成)是一种将信息检索系统与语言模型相结合的技术架构。其核心理念是让大语言模型在生成回答时,能够动态…...

服务了50家客户后,我发现:AI转型成功的企业,老板都做对了这三件事
过去几年,我深度服务了50多家推进AI转型的企业,亲眼看着一些企业从AI小白成长为行业标杆,也目睹了更多企业在各种坑里挣扎。复盘这些成败案例,我发现一个有意思的现象:AI转型成功的企业,技术路线千差万别&a…...

Windows 10系统清理终极指南:让旧电脑重获新生的免费神器
Windows 10系统清理终极指南:让旧电脑重获新生的免费神器 【免费下载链接】Win10BloatRemover Configurable CLI tool to easily and aggressively debloat and tweak Windows 10 by removing preinstalled UWP apps, services and more. Originally based on the W…...

从寄存器手册到代码:手把手教你逆向分析ES8311官方驱动配置逻辑
逆向工程实战:解码ES8311音频芯片寄存器配置的艺术 在嵌入式音频开发领域,真正的高手往往不是那些只会调用API的开发者,而是能够深入芯片寄存器层面,理解每一个配置位意义的"芯片侦探"。ES8311作为一款广泛应用于智能设…...

学Simulink——基于Simulink的轴向磁通电机多物理场耦合仿真
目录 手把手教你学Simulink——基于Simulink的轴向磁通电机多物理场耦合仿真 摘要 一、背景与挑战 1.1 为什么轴向磁通电机的仿真让人“头秃”? 1.2 核心痛点与设计目标 二、系统架构与核心控制推导 2.1 整体架构:跨越维度的“降阶打击” 2.2 核心数学推…...
)
LangChain项目实战:我用Ollama和FAISS搭建了一个私人知识库问答机器人(含numpy版本冲突避坑)
LangChain项目实战:用Ollama和FAISS构建企业级知识库问答系统 当技术团队需要快速从海量文档中提取精准答案时,传统的关键词搜索往往力不从心。去年为某金融客户部署知识库系统时,我们测试发现:员工平均每天要花费2.3小时在文档检…...

Laravel Blade 中高效筛选并限制关联分类数据的实践指南
本文讲解如何在 Laravel 中避免在 Blade 模板中嵌套循环与字符串解析,转而使用数据库层的 WHERE FIND_IN_SET() 配合 limit() 实现精准、高效的数据筛选与分页控制。 本文讲解如何在 laravel 中避免在 blade 模板中嵌套循环与字符串解析,转而使用数…...