RockerMQ集群部署
目录
- 一、Broker集群模式
- 1、单Master:
- 2、多Master多Slave模式异步复制
- 3、多Master多Slave模式同步双写
- 二、集群搭建实践
- 1、集群架构
- 2、克隆生成rocketmqos1
- 3、修改rocketmqos1配置文件
- 4、克隆生成rocketmqOS2
- 5、修改rocketmqOS2配置文件
- 6、启动服务器
- 7、测试
一、Broker集群模式
根据Broker集群中各个节点间关系的不同,Broker集群可以分为以下几类:
1、单Master:
只有一个broker(其本质上就不能称为集群)。这种方式也只能是在测试时使用,生产环境下不能使用,因为存在单点问题。
多Master:broker集群仅由多个master构成,不存在Slave。同一Topic的各个Queue会平均分布在各个master节点上。
优点: 配置简单,单个Master宕机或重启维护对应用无影响,在磁盘配置为RAID10时,即使机器宕机不可恢复情况下,由于RAID10磁盘非常可靠,消息也不会丢(异步刷盘丢失少量消息,同步刷盘一条不丢),性能最高;
缺点: 单台机器宕机期间,这台机器上未被消费的消息在机器恢复之前不可订阅(不可消费),消息实时性会受到影响。
2、多Master多Slave模式异步复制
broker集群由多个master构成,每个master又配置了多个slave(在配置了RAID磁盘阵列的情况下,一个master一般配置一个slave即可)。master与slave的关系是主备关系,即master负责处理消息的读写请求,而slave仅负责消息的备份与master宕机后的角色切换。
异步复制即前面所讲的复制策略中的异步复制策略,即消息写入master成功后,master立即向producer返回成功ACK,无需等待slave同步数据成功。
该模式的最大特点之一是,当master宕机后slave能够自动切换为master。不过由于slave从master的同步具有短暂的延迟(毫秒级),所以当master宕机后,这种异步复制方式可能会存在少量消息的丢失问题。
3、多Master多Slave模式同步双写
该模式是多Master多Slave模式的同步复制实现。所谓同步双写,指的是消息写入master成功后,master会等待slave同步数据成功后才向producer返回成功ACK,即master与slave都要写入成功后才会返回成功ACK,也即双写。
该模式与异步复制模式相比,优点是消息的安全性更高,不存在消息丢失的情况。但单个消息的RT略高,从而导致性能要略低(大约低10%)。
该模式存在一个大的问题:对于目前的版本,Master宕机后,Slave不会自动切换到Master。
二、集群搭建实践
1、集群架构
这里要搭建一个双主双从异步复制的Broker集群。为了方便,这里使用了两台主机来完成集群的搭建。这两台主机的功能与broker角色分配如下表:

2、克隆生成rocketmqos1
克隆rocketmqOS主机,并修改配置。指定主机名为rocketmqOS1。
3、修改rocketmqos1配置文件
配置文件位置:要修改的配置文件在rocketMQ解压目录的 conf/2m-2s-async目录中
修改 broker-a.properties ,将该配置文件内容修改为如下:
# 指定整个broker集群的名称,或者说是RocketMQ集群的名称
brokerClusterName=DefaultCluster
# 指定master-slave集群的名称。一个RocketMQ集群可以包含多个master-slave集群
brokerName=broker-a
# master的brokerId为0
brokerId=0
# 指定删除消息存储过期文件的时间为凌晨4点
deleteWhen=04
# 指定未发生更新的消息存储文件的保留时长为48小时,48小时后过期,将会被删除
fileReservedTime=48
# 指定当前broker为异步复制master
brokerRole=ASYNC_MASTER
# 指定刷盘策略为异步刷盘
flushDiskType=ASYNC_FLUSH
# 指定Name Server的地址
namesrvAddr=10.70.20.11:9876;10.70.20.12:9876
修改broker-b-s.properties,将该配置文件内容修改为如下
brokerClusterName=DefaultCluster
# 指定这是另外一个master-slave集群
brokerName=broker-b
# slave的brokerId为非0
brokerId=1
deleteWhen=04
fileReservedTime=48
# 指定当前broker为slave
brokerRole=SLAVE
flushDiskType=ASYNC_FLUSH
namesrvAddr=192.168.59.164:9876;192.168.59.165:9876
# 指定Broker对外提供服务的端口,即Broker与producer与consumer通信的端口。默认10911。由于当前主机同时充当着master1与slave2,而前面的master1使用的是默认端口。这里需要将这两个端口加以区分,以区分出master1与slave2
listenPort=11911
# 指定消息存储相关的路径。默认路径为~/store目录。由于当前主机同时充当着master1与slave2,master1使用的是默认路径,这里就需要再指定一个不同路径
storePathRootDir=~/store-s
storePathCommitLog=~/store-s/commitlog
storePathConsumeQueue=~/store-s/consumequeue
storePathIndex=~/store-s/index
storeCheckpoint=~/store-s/checkpoint
abortFile=~/store-s/abort
4、克隆生成rocketmqOS2
克隆rocketmqOS1主机,并修改配置。指定主机名为rocketmqOS2。
5、修改rocketmqOS2配置文件
对于rocketmqOS2主机,同样需要修改rocketMQ解压目录的conf目录的子目录2m-2s-async中的两个配置文件。
修改broker-b.properties:将该配置文件内容修改为如下
brokerClusterName=DefaultCluster
brokerName=broker-b
brokerId=0
deleteWhen=04
fileReservedTime=48
brokerRole=ASYNC_MASTER
flushDiskType=ASYNC_FLUSH
namesrvAddr=10.70.20.12:9876;10.70.20.11:9876
修改broker-a-s.properties:将该配置文件内容修改为如下
brokerClusterName=DefaultCluster
brokerName=broker-a
brokerId=1
deleteWhen=04
fileReservedTime=48
brokerRole=SLAVE
flushDiskType=ASYNC_FLUSH
namesrvAddr=192.168.59.164:9876;192.168.59.165:9876
listenPort=11911
storePathRootDir=~/store-s
storePathCommitLog=~/store-s/commitlog
storePathConsumeQueue=~/store-s/consumequeue
storePathIndex=~/store-s/index
storeCheckpoint=~/store-s/checkpoint
abortFile=~/store-s/abort
6、启动服务器
启动NameServer集群
分别启动rocketmqOS1与rocketmqOS2两个主机中的NameServer。启动命令完全相同。
nohup sh bin/mqnamesrv &
tail -f ~/logs/rocketmqlogs/namesrv.log
启动两个Master
(分别启动rocketmqOS1与rocketmqOS2两个主机中的broker master。注意,它们指定所要加载的配置文件是不同的。)
nohup sh bin/mqbroker -c conf/2m-2s-async/broker-a.properties &
tail -f ~/logs/rocketmqlogs/broker.log
nohup sh bin/mqbroker -c conf/2m-2s-async/broker-b.properties &
tail -f ~/logs/rocketmqlogs/broker.log
启动两个Slave
(分别启动rocketmqOS1与rocketmqOS2两个主机中的broker slave。注意,它们指定所要加载的配置文件是不同的.)
nohup sh bin/mqbroker -c conf/2m-2s-async/broker-b-s.properties &
tail -f ~/logs/rocketmqlogs/broker.log
nohup sh bin/mqbroker -c conf/2m-2s-async/broker-a-s.properties &
tail -f ~/logs/rocketmqlogs/broker.log
7、测试
按上一篇博客最后的方法进行测试即可https://blog.csdn.net/zzyyllll/article/details/129168549?spm=1001.2014.3001.5501
点进集群里,显示四台即表示配置集群成功。
相关文章:
RockerMQ集群部署
目录一、Broker集群模式1、单Master:2、多Master多Slave模式异步复制3、多Master多Slave模式同步双写二、集群搭建实践1、集群架构2、克隆生成rocketmqos13、修改rocketmqos1配置文件4、克隆生成rocketmqOS25、修改rocketmqOS2配置文件6、启动服务器7、测试一、Brok…...

unicloud的aggregate聚合查询时间戳转日期
我特么不知道看了这个帖子几百遍才看明白到-----》unicloud数据库中,聚合操作如何操作时间戳? - DCloud问答 自己淋过雨老想着为别人撑伞,可怜我这35岁的老人家,给我去点关注!!!!&a…...

Vue2.0开发之——使用ref引用组件实例(41)
一 概述 在本组件内部修改count的值在父组件内修改子组件的count值 二 在本组件内部修改count的值 2.1 Left.vue 布局代码 <template><div class"left-container"><h3 >Left 组件---{{count}}</h3><button click"count 1"&…...

极狐GitLab仓库瘦身
参考文章: [分享] 极狐GitLab仓库瘦身 - 官方技术分享 - 极狐GitLab 论坛 一、瘦身概述 Git仓库随着时间推移会变得越来越大,比如很多比较大的文件加入Git仓库时,可能引起以下问题: 下载仓库越来越慢,因为每个人都…...
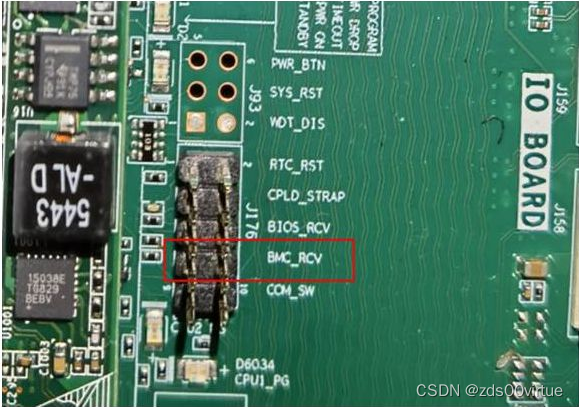
2288hv5超融合服务器 数码管报888
【问题现象】 2288hv5超融合服务器,前面板数码管报888,电源灯黄灯闪烁,开不了机,ibmc网络是通的,但是web网页打不开 【问题原因】 iBMC的版本过低,iBMC在智能诊断数据库保护机制存在异常,导…...

【Zabbix实战之部署篇】Zabbix监控windows系统配置方法
【Zabbix实战之部署篇】Zabbix监控windows系统配置方法 一、检查Zabbix监控平台状态1.检查Zabbix各组件状态2.检查Zabbix的首页二、下载windows代理1.访问Zabbix官网下载界面2.查看下载安装包三、安装windows agent2代理1.安装windows agent2代理2.代理基本配置信息3.开始进行安…...

在Windows上编译Nginx
《在Windows上编译Nginx》视频教程官方编译说明 Building nginx on the Win32 platform with Visual C 环境准备 1. Microsoft Visual Studio(Microsoft Visual C 编译器),下载地址:https://visualstudio.microsoft.com/zh-hans/。 2. Git(备用)&…...
语音识别与Python编程实践
博主简介 博主是一名大二学生,主攻人工智能研究。感谢让我们在CSDN相遇,博主致力于在这里分享关于人工智能,c,Python,爬虫等方面知识的分享。 如果有需要的小伙伴可以关注博主,博主会继续更新的,…...
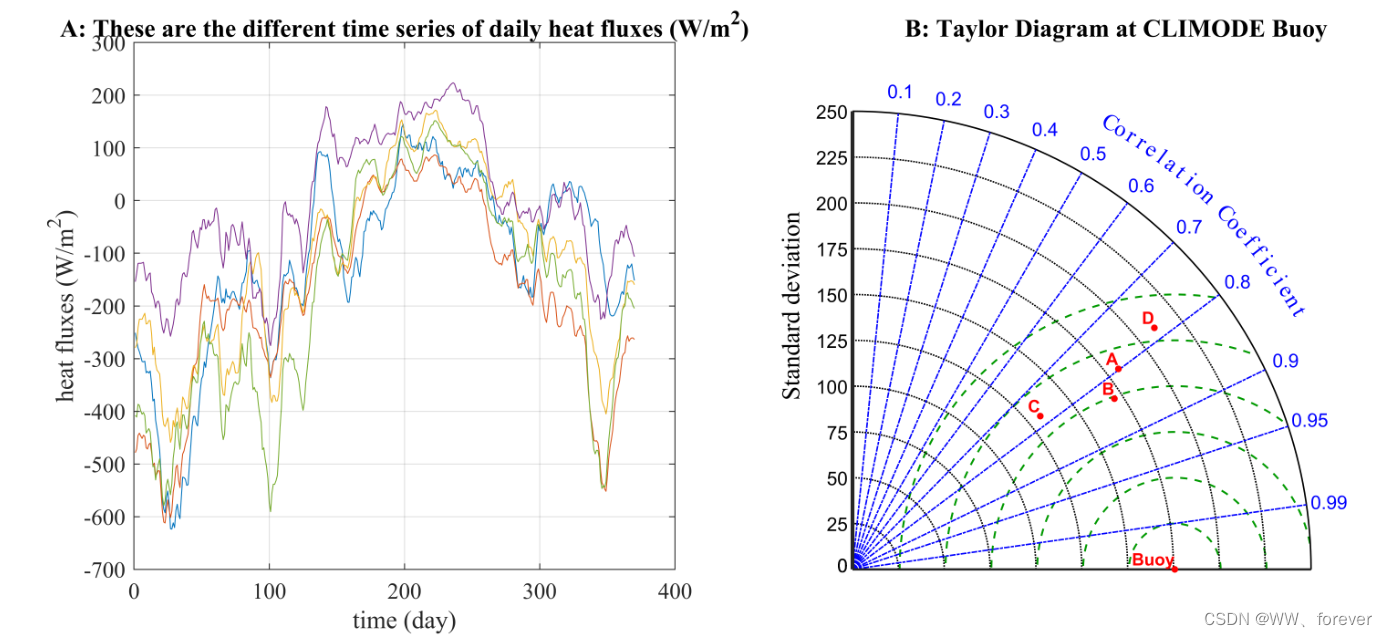
MATLAB绘制泰勒图(Taylor diagram)
泰勒图(Taylor diagram) 泰勒图是Karl E. Taylor于2001年首先提出,主要用来比较几个气象模式模拟的能力,因此该表示方法在气象领域使用最多,但是在其他自然科学领域也有一定的应用。 泰勒图常用于评价模型的精度&…...
ClickHouse高可用集群分片-副本实操(四)
目录 一、ClickHouse高可用之ReplicatedMergeTree引擎 二、 ClickHouse高可用架构准备-环境说明和ZK搭建 三、高可用集群架构-ClickHouse副本配置实操 四、ClickHouse高可用集群架构分片 4.1 ClickHouse高可用架构之两分片实操 4.2 ClickHouse高可用架构之两分片建表实操 一…...
2022年中国工业机器人行业市场回顾及2023年发展前景预测分析
工业机器人是一种能自动定位控制、可重复编程的、多功能的、多自由度的操作机,广泛应用于码垛、冲压、分拣、焊接、切割、喷涂、上下料等工业场景中,极大提高了生产效率、安全性以及智能化水平。工业机器人作为我国高端制造业的典型代表,近年…...
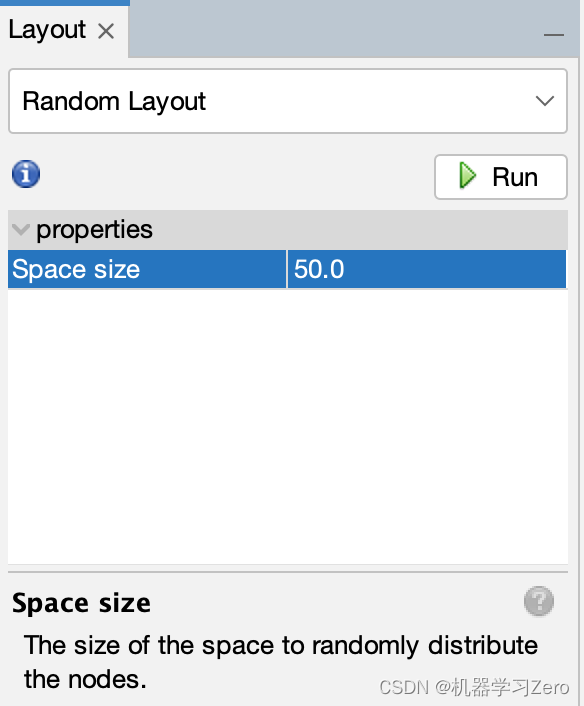
Gehpi的网络布局
Gehpi的网络布局1. 力引导布局2. 辅助布局布局是网络可视化中的重要概念,指将点和边通过某种策略进行排布,应尽可能满足以下4个原则: 节点均匀分布在有限的区域内避免边的交叉和弯曲保持边的长度一致整体布局能反映图内在的特性 Gephi的布局…...

华为OD机试用Python实现 -【天然蓄水库 or 天然蓄水池】(2023-Q1 新题)
华为OD机试题 华为OD机试300题大纲天然蓄水库 or 天然蓄水池题目描述输入描述输出描述说明示例一输入输出说明示例二输入输出说明示例三输入输出说明Python 代码实现算法思路华为OD机试300题大纲 参加华为...
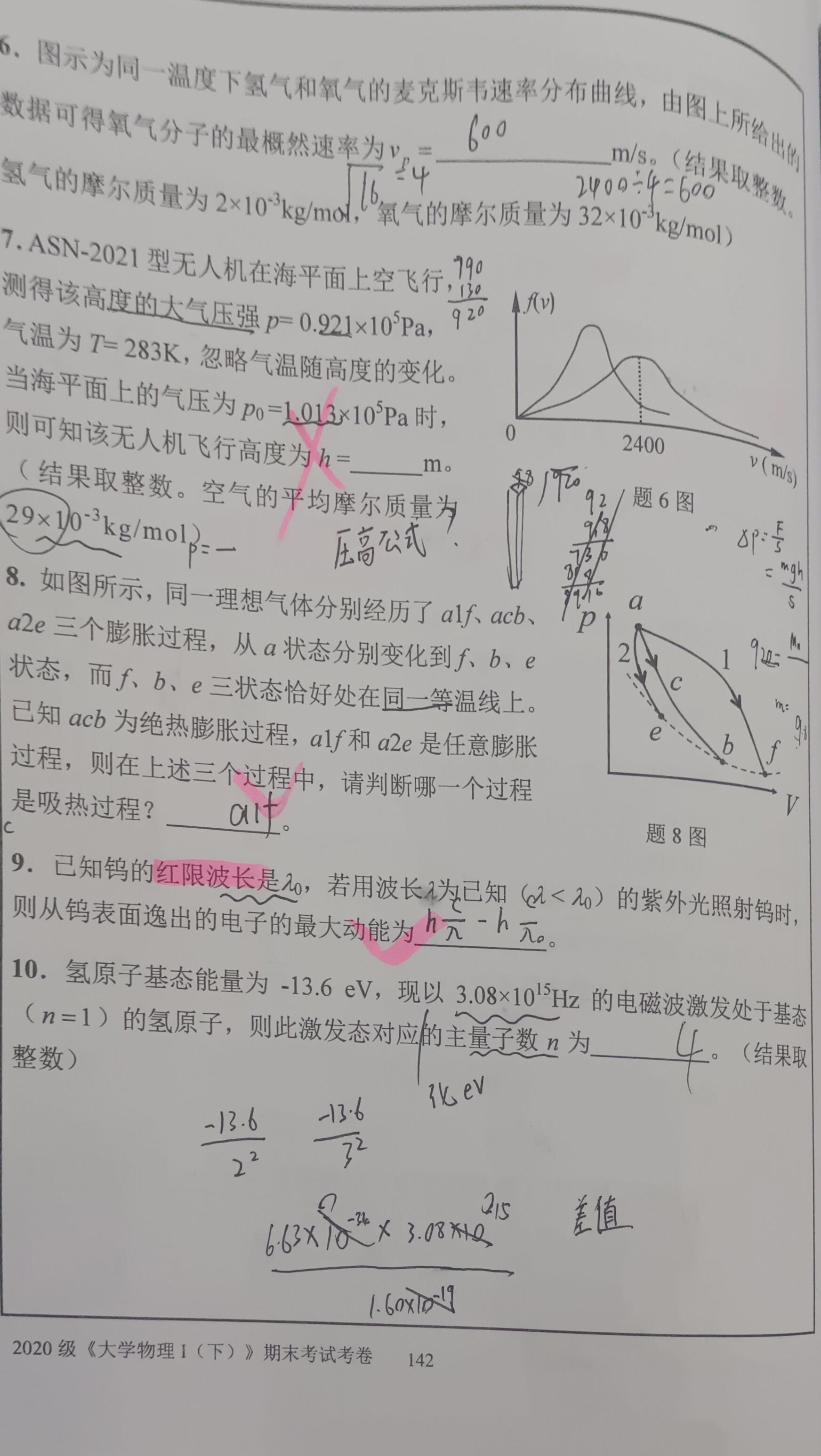
西北工业大学大学物理(I)下期末考试2021-2022选填解析
11 告诉你n2了,那么l0或者1,后续限制类推。2 几乎每年都出。散射波波长的偏移只与散射角有关。3 产生激光的条件。先认识到激光就是受激幅射光放大。受激辐射是产生激光的必要条件,粒子数偏转是产生激光的必要条件,谐振腔也需要。…...

【数据结构】手撕红黑树
目录 一、红黑树简介 1、红黑树的简介 2、红黑树的性质 二、红黑树的插入(看叔叔的颜色就行) 1、为什么新插入的节点必须给红色? 2、插入红色节点后,判定红黑树性质是否被破坏 2.1情况一:uncle存在且为红 2.2情…...

Linux基础命令-which查找命令文件位置
文章目录 which 命令功能 语法格式 基本参数 参考实例 1)查找chmod命令的文件位置 2)查找chmod命令的所有路径 3)一次性查找多个命令路径 4)组合其他命令一起使用 5)显示命令的版本信息 命令总结 which 命…...

在Python中,导入拓展库的规范如下:
在Python中,导入拓展库的规范如下: Import 模块名 [as 别名] from 模块名Import 对象名 [as 别名] from 模块名 import * 1.导入标准库和第三方库的方式应该不同 Python标准库已经默认安装在Python解释器中,因此在导入标准库时不需要…...
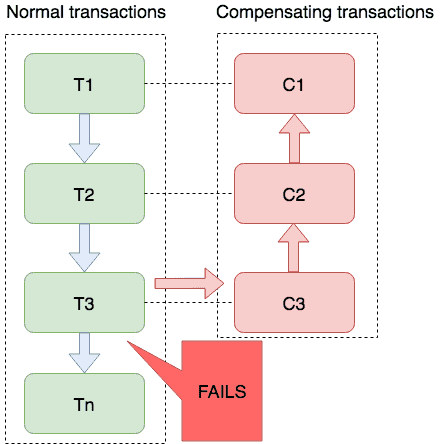
SEATA是什么?它的四种分布式事务模式
一、SEATA是什么? Seata 是一款开源的分布式事务解决方案,致力于提供高性能和简单易用的分布式事务服务。Seata 将为用户提供了 AT、TCC、SAGA 和 XA 事务模式,为用户打造一站式的分布式解决方案。 在继续学习使用SEATA之前,对s…...
【华为OD机试模拟题】用 C++ 实现 - 去重求和(2023.Q1)
最近更新的博客 【华为OD机试模拟题】用 C++ 实现 - 获得完美走位(2023.Q1) 文章目录 最近更新的博客使用说明去重求和题目输入输出示例一输入输出说明示例一输入输出说明Code使用说明 参加华为od机试,一定要注意不要完全背诵代码,需要理解之后模仿写出,通过率才会高。…...

如何用 chatGPT,给大家来一个自我介绍
大家好,我是不吃西红柿的无线机械键盘,我的名字叫 Keychron K3 Pro。今天,我通过西红柿主人的手,使用 chatGPT 来介绍一下我自己。我的与众不同 我是由精密机械元件制作而成,并采用抗键渗设计,以提供更快、…...

雪球网md5__1038参数逆向解析与Node.js复现
1. 这不是“破解”,而是对前端加密逻辑的常规逆向还原你打开雪球网任意一只股票详情页,F12 打开开发者工具,切到 Network 面板,刷新页面——很快就能在 XHR 请求里捕获到类似这样的接口:https://xueqiu.com/stock/cube…...

Taotoken如何帮助教育科技产品实现个性化学习辅导
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken如何帮助教育科技产品实现个性化学习辅导 1. 场景与挑战 教育科技公司在开发个性化学习助手时,常常面临一个核…...

约束感知图缩减算法在量子优化中的应用
1. 约束感知图缩减算法概述在量子计算领域,资源受限一直是制约算法实际应用的主要瓶颈。以当前主流的超导量子计算机为例,其量子比特数通常在50-100个之间,且存在显著的噪声干扰。这种硬件限制使得许多经典优化问题难以直接映射到量子设备上求…...

别再把大模型当搜索框了:一文讲透 LLM 的基本原理、能力边界与局限性
写在前面很多人把大语言模型当成“会聊天的搜索引擎”,结果一上线就遇到幻觉、口径不稳、上下文丢失、成本失控。真正理解 LLM,要先抓住一句话:它是基于 Transformer 的概率生成模型,核心能力来自海量预训练、上下文学习与后训练对…...

AICoverGen终极指南:快速创建AI翻唱歌曲的完整教程
AICoverGen终极指南:快速创建AI翻唱歌曲的完整教程 【免费下载链接】AICoverGen A WebUI to create song covers with any RVC v2 trained AI voice from YouTube videos or audio files. 项目地址: https://gitcode.com/gh_mirrors/ai/AICoverGen 想要让你的…...
CI/CD流水线中的幽灵依赖——DeepSeek项目92%存在未声明的transitive risk,你中招了吗?
更多请点击: https://intelliparadigm.com 第一章:CI/CD流水线中的幽灵依赖——DeepSeek项目92%存在未声明的transitive risk,你中招了吗? 在现代CI/CD实践中,开发者常误以为 package.json 或 requirements.txt 中显式…...

终极鸣潮优化指南:WaveTools工具箱让你的游戏体验飞起来
终极鸣潮优化指南:WaveTools工具箱让你的游戏体验飞起来 【免费下载链接】WaveTools 🧰鸣潮工具箱 项目地址: https://gitcode.com/gh_mirrors/wa/WaveTools 对于《鸣潮》玩家来说,流畅的游戏体验和个性化的配置管理是提升游戏乐趣的关…...

Python多智能体建模终极指南:用Mesa轻松构建复杂系统仿真
Python多智能体建模终极指南:用Mesa轻松构建复杂系统仿真 【免费下载链接】mesa Mesa is an open-source Python library for agent-based modeling, ideal for simulating complex systems and exploring emergent behaviors. 项目地址: https://gitcode.com/gh_…...

城通网盘直链解析终极指南:3分钟告别广告等待
城通网盘直链解析终极指南:3分钟告别广告等待 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet 还在为城通网盘下载而烦恼吗?每次下载都要面对烦人的广告等待,还要输入…...

Linux 软链接和硬链接详解:ln 命令背后的 inode 原理
Linux 软链接和硬链接详解:ln 命令背后的 inode 原理 1. 前言 Linux 中经常会看到链接文件,例如: /bin -> /usr/bin python -> python3 current -> /opt/app/releases/v2Linux 链接主要有两种: 软链接:symbol…...