【ROS入门】雷达、摄像头及kinect信息仿真以及显示
文章结构
- 雷达信息仿真以及显示
- Gazebo仿真雷达
- 配置雷达传感器信息
- xacro文件集成
- 启动仿真环境
- Rviz显示雷达数据
- 摄像头信息仿真以及显示
- Gazebo仿真摄像头
- 新建xacro文件,配置摄像头传感器信息
- xacro文件集成
- 启动仿真环境
- Rviz显示摄像头数据
- kinect信息仿真以及显示
- Gazebo仿真Kinect
- 新建 Xacro 文件,配置 kinetic传感器信息
- xacro文件集成
- 启动仿真环境
- Rviz显示Kinect数据
- kinect点云数据显示
雷达信息仿真以及显示
通过 Gazebo 模拟激光雷达传感器,并在 Rviz 中显示激光数据。
实现流程:
-
已经创建完毕的机器人模型,编写一个单独的 xacro 文件,为机器人模型添加雷达配置;
-
将此文件集成进xacro文件;
-
启动 Gazebo,使用 Rviz 显示雷达信息。
Gazebo仿真雷达
配置雷达传感器信息
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro"><gazebo reference="laser"><sensor type="ray" name="rplidar"><pose>0 0 0 0 0 0</pose><visualize>true</visualize><update_rate>5.5</update_rate><ray><scan><horizontal><samples>360</samples><resolution>1</resolution><min_angle>-3</min_angle><max_angle>3</max_angle></horizontal></scan><range><min>0.10</min><max>30.0</max><resolution>0.01</resolution></range><noise><type>gaussian</type><mean>0.0</mean><stddev>0.01</stddev></noise></ray><plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so"><topicName>/scan</topicName><frameName>laser</frameName></plugin></sensor></gazebo>
</robot>
xacro文件集成
<robot name="mycar" xmlns:xacro="http://www.ros.org/wiki/xacro"><xacro:include filename="../head.xacro"/><xacro:include filename="demo05_car_base.urdf.xacro"/><xacro:include filename="demo06_car_camera.urdf.xacro"/><xacro:include filename="demo07_car_laser.urdf.xacro"/><xacro:include filename="../gazebo/move.xacro"/><xacro:include filename="../gazebo/laser.xacro"/>
</robot>
启动仿真环境
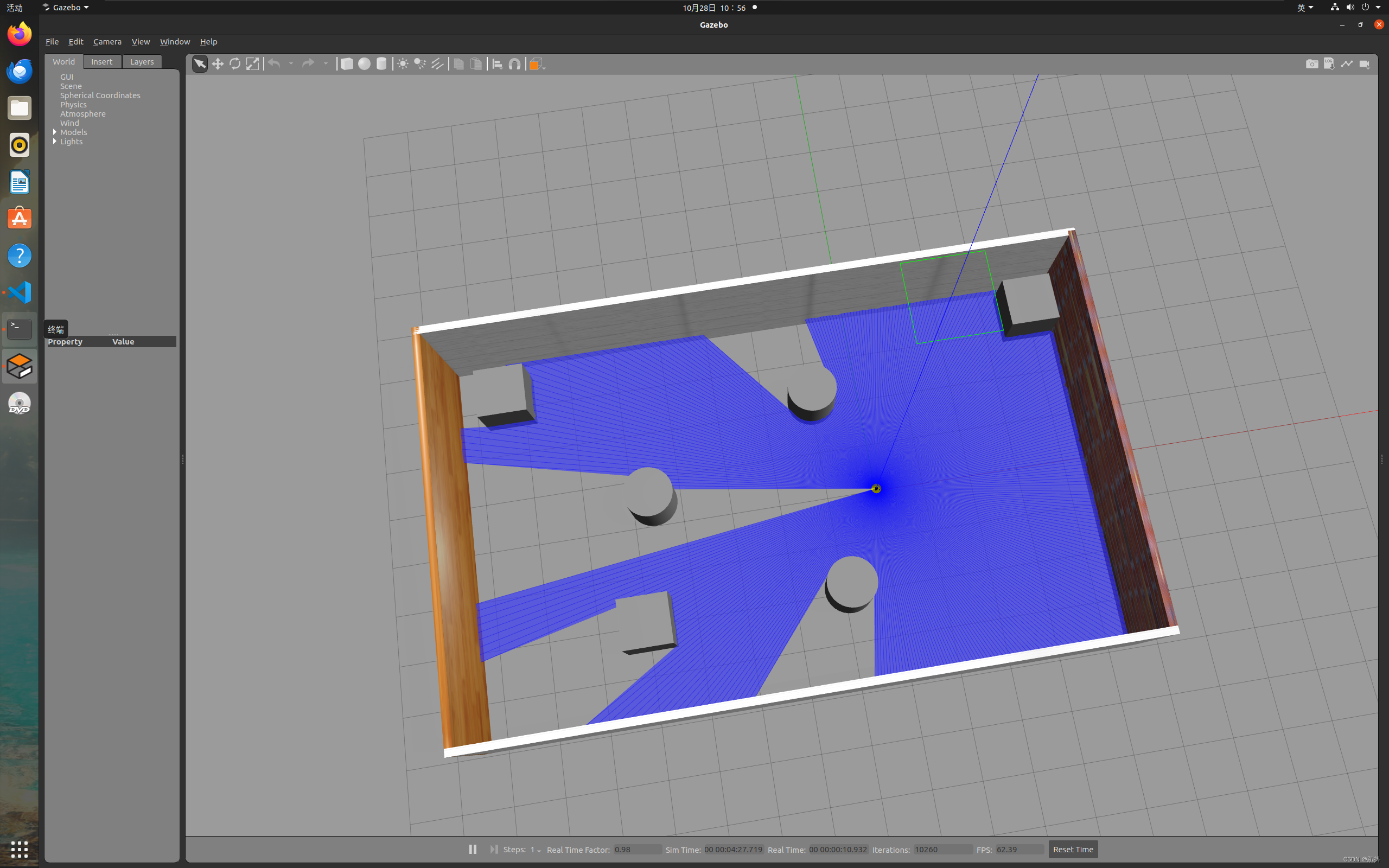
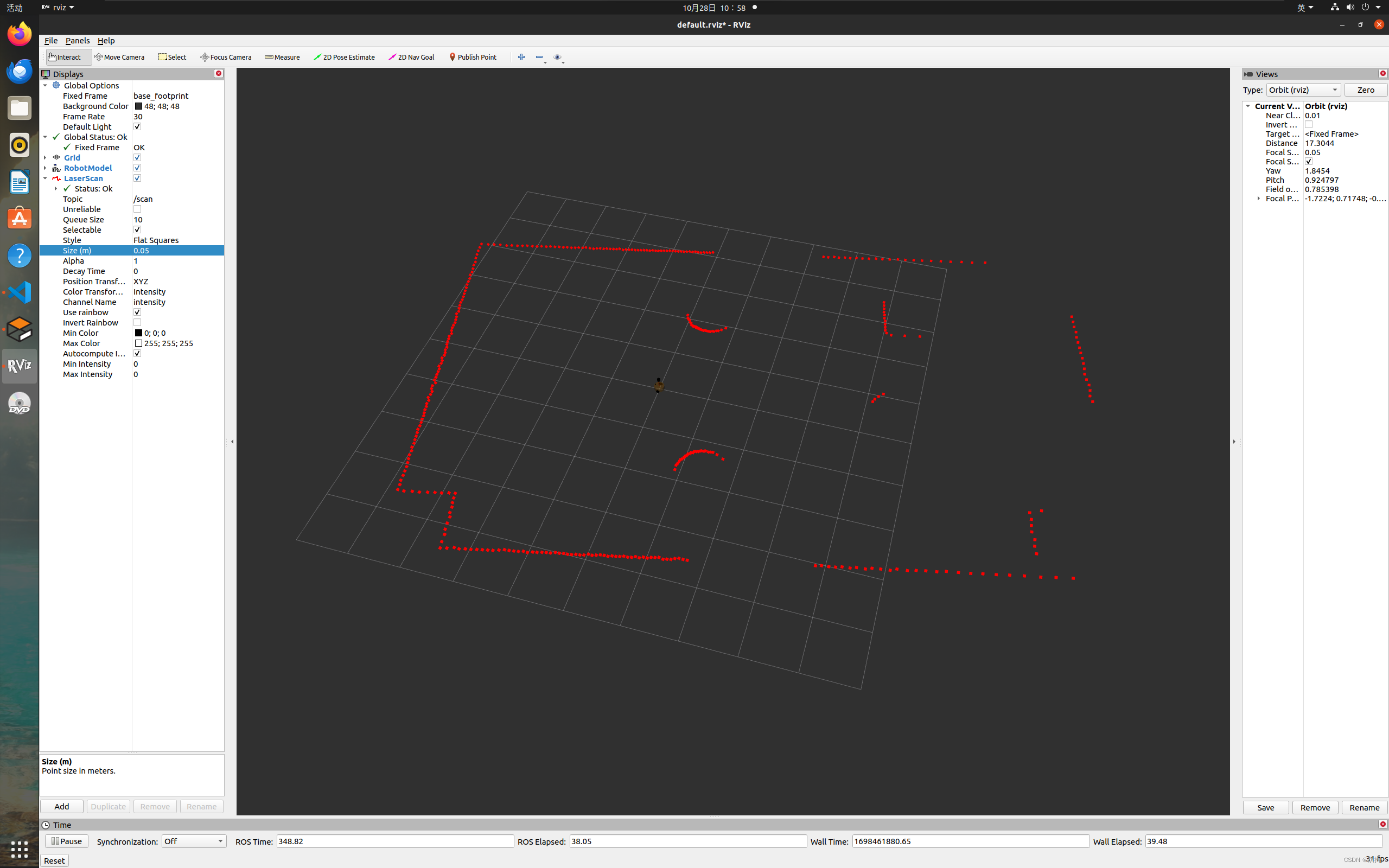
Rviz显示雷达数据
先启动 rviz,添加雷达信息显示插件
摄像头信息仿真以及显示
通过 Gazebo 模拟摄像头传感器,并在 Rviz 中显示摄像头数据。
实现流程:
-
已经创建完毕的机器人模型,编写一个单独的 xacro 文件,为机器人模型添加摄像头配置;
-
将此文件集成进xacro文件;
-
启动 Gazebo,使用 Rviz 显示摄像头信息。
Gazebo仿真摄像头
新建xacro文件,配置摄像头传感器信息
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 被引用的link --><gazebo reference="camera"><!-- 类型设置为 camara --><sensor type="camera" name="camera_node"><update_rate>30.0</update_rate> <!-- 更新频率 --><!-- 摄像头基本信息设置 --><camera name="head"><horizontal_fov>1.3962634</horizontal_fov><image><width>1280</width><height>720</height><format>R8G8B8</format></image><clip><near>0.02</near><far>300</far></clip><noise><type>gaussian</type><mean>0.0</mean><stddev>0.007</stddev></noise></camera><!-- 核心插件 --><plugin name="gazebo_camera" filename="libgazebo_ros_camera.so"><alwaysOn>true</alwaysOn><updateRate>0.0</updateRate><cameraName>/camera</cameraName><imageTopicName>image_raw</imageTopicName><cameraInfoTopicName>camera_info</cameraInfoTopicName><frameName>camera</frameName><hackBaseline>0.07</hackBaseline><distortionK1>0.0</distortionK1><distortionK2>0.0</distortionK2><distortionK3>0.0</distortionK3><distortionT1>0.0</distortionT1><distortionT2>0.0</distortionT2></plugin></sensor></gazebo>
</robot>
xacro文件集成
<robot name="mycar" xmlns:xacro="http://www.ros.org/wiki/xacro"><xacro:include filename="../head.xacro"/><xacro:include filename="demo05_car_base.urdf.xacro"/><xacro:include filename="demo06_car_camera.urdf.xacro"/><xacro:include filename="demo07_car_laser.urdf.xacro"/><xacro:include filename="../gazebo/move.xacro"/><xacro:include filename="../gazebo/laser.xacro"/><xacro:include filename="../gazebo/camera.xacro"/>
</robot>
启动仿真环境
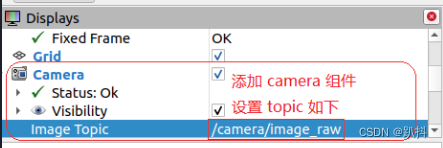
Rviz显示摄像头数据
执行 gazebo 并启动 Rviz,在 Rviz 中添加摄像头组件。
实现效果:

kinect信息仿真以及显示
通过 Gazebo 模拟kinect摄像头,并在 Rviz 中显示kinect摄像头数据。
实现流程:
-
已经创建完毕的机器人模型,编写一个单独的 xacro 文件,为机器人模型添加kinect摄像头配置;
-
将此文件集成进xacro文件;
-
启动 Gazebo,使用 Rviz 显示kinect摄像头信息。
Gazebo仿真Kinect
新建 Xacro 文件,配置 kinetic传感器信息
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro"><gazebo reference="support"> <!-- reference为kinect link名称 --><sensor type="depth" name="camera"><always_on>true</always_on><update_rate>20.0</update_rate><camera><horizontal_fov>${60.0*PI/180.0}</horizontal_fov><image><format>R8G8B8</format><width>640</width><height>480</height></image><clip><near>0.05</near><far>8.0</far></clip></camera><plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so"><cameraName>camera</cameraName><alwaysOn>true</alwaysOn><updateRate>10</updateRate><imageTopicName>rgb/image_raw</imageTopicName><depthImageTopicName>depth/image_raw</depthImageTopicName><pointCloudTopicName>depth/points</pointCloudTopicName><cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName><depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName><frameName>support</frameName><baseline>0.1</baseline><distortion_k1>0.0</distortion_k1><distortion_k2>0.0</distortion_k2><distortion_k3>0.0</distortion_k3><distortion_t1>0.0</distortion_t1><distortion_t2>0.0</distortion_t2><pointCloudCutoff>0.4</pointCloudCutoff></plugin></sensor></gazebo>
</robot>
xacro文件集成
<robot name="mycar" xmlns:xacro="http://www.ros.org/wiki/xacro"><xacro:include filename="../head.xacro"/><xacro:include filename="demo05_car_base.urdf.xacro"/><xacro:include filename="demo06_car_camera.urdf.xacro"/><xacro:include filename="demo07_car_laser.urdf.xacro"/><xacro:include filename="../gazebo/move.xacro"/><xacro:include filename="../gazebo/laser.xacro"/><xacro:include filename="../gazebo/camera.xacro"/><xacro:include filename="../gazebo/kinect.xacro"/>
启动仿真环境
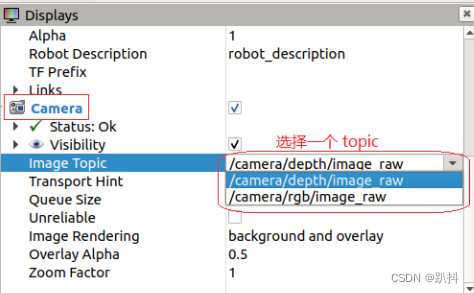
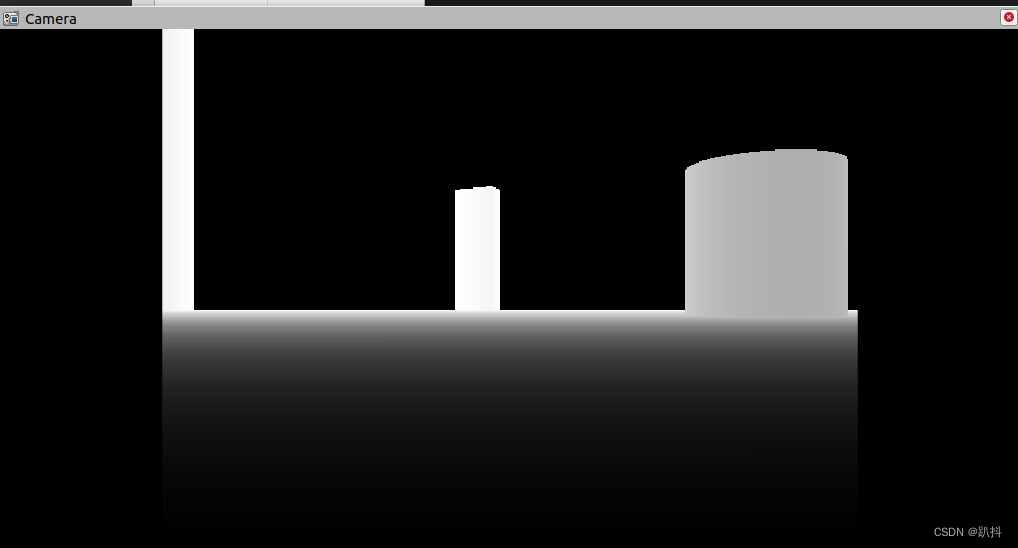
Rviz显示Kinect数据
启动 rviz,添加摄像头组件查看数据
实现效果:
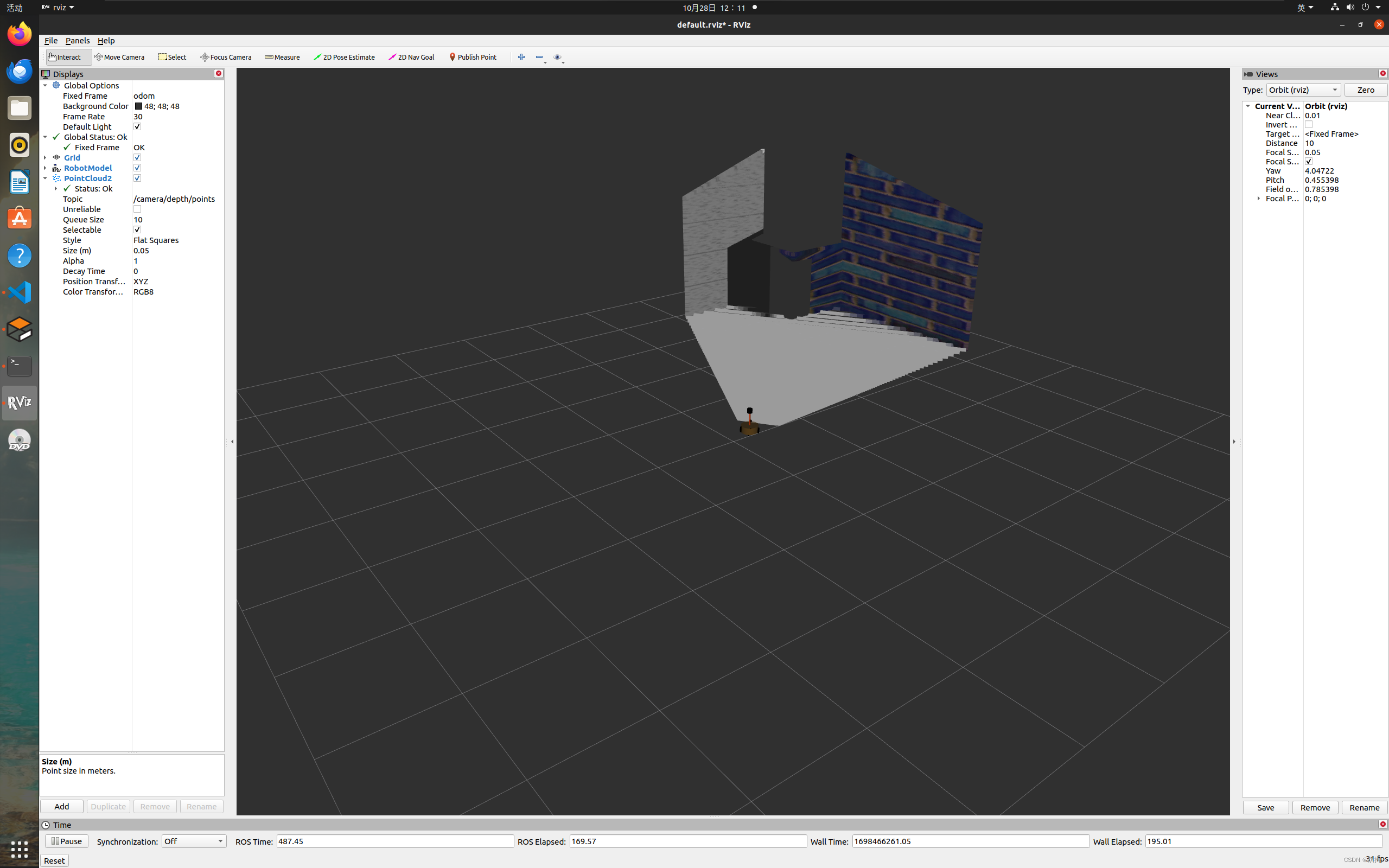
kinect点云数据显示
- 在插件中为kinect设置坐标系,修改配置文件的标签内容:
<frameName>support_depth</frameName>- 发布新设置的坐标系到kinect连杆的坐标变换关系,在启动rviz的launch中,添加:
<node pkg="tf2_ros" type="static_transform_publisher" name="static_transform_publisher" args="0 0 0 -1.57 0 -1.57 /support /support_depth" />
- 启动rviz并添加组件
相关文章:
【ROS入门】雷达、摄像头及kinect信息仿真以及显示
文章结构 雷达信息仿真以及显示Gazebo仿真雷达配置雷达传感器信息xacro文件集成启动仿真环境 Rviz显示雷达数据 摄像头信息仿真以及显示Gazebo仿真摄像头新建xacro文件,配置摄像头传感器信息xacro文件集成启动仿真环境 Rviz显示摄像头数据 kinect信息仿真以及显示Ga…...
实用篇-认识微服务
一、服务架构演变 1. 单体架构 单体架构:将业务的所有功能集中在一个项目中开发,打成一个包部署 单体架构的优点: 架构简单部署成本低 单体架构的缺点: 耦合度高 2. 分布式架构 分布式架构: 根据业务功能对系…...

【产品运营】产品需求应该如何管理
产品项目在进行时经常会有一些需求需要实现,需求是产品更新迭代的动力,需求也是从用户诉求转化而来;在做需求管理时,我们需要判断一个需求的优先级等方面,对产品进行优化; 目录: 一、 为什么要…...
Linux 系统调用IO口,利用光标偏移实现文件复制
用系统调用IO函数实现从一个文件读取最后2KB数据并复制到另一个文件中,源文件以只读方式打开,目标文件以只写的方式打开,若目标文件不存在,可以创建并设置初始值为0664,写出相应代码,要对出错情况有一定的处…...

【原创】指针变量作为函数参数要点注意
指针变量作为函数参数要点注意(已写至笔记) 1传参指针不加*(main中函数) 2收参指针要加*(被main调用的函数) 3传参指针名可与收参指针名不同,不影响 4【问】如何看主函数中指针所指内容是否改变…...
SpringMVC Day 04 : 数据绑定
前言 SpringMVC是一个非常流行的Java Web框架,它提供了很多方便的功能和工具来帮助我们构建高效、灵活的Web应用程序。其中,数据绑定就是SpringMVC中非常重要的一部分,它可以帮助我们方便地将请求参数绑定到Java对象上,从而简化了…...

2.3.1 协程设计原理与汇编实现
1.为什么要有协程? 同步的编程方式,异步的性能。同步编程时,我们需要等待io就绪。但是在协程这里,我们使用一种机制,当io需要等待时,就切到下一个io,之后当之前的io就绪时,再切换回来…...
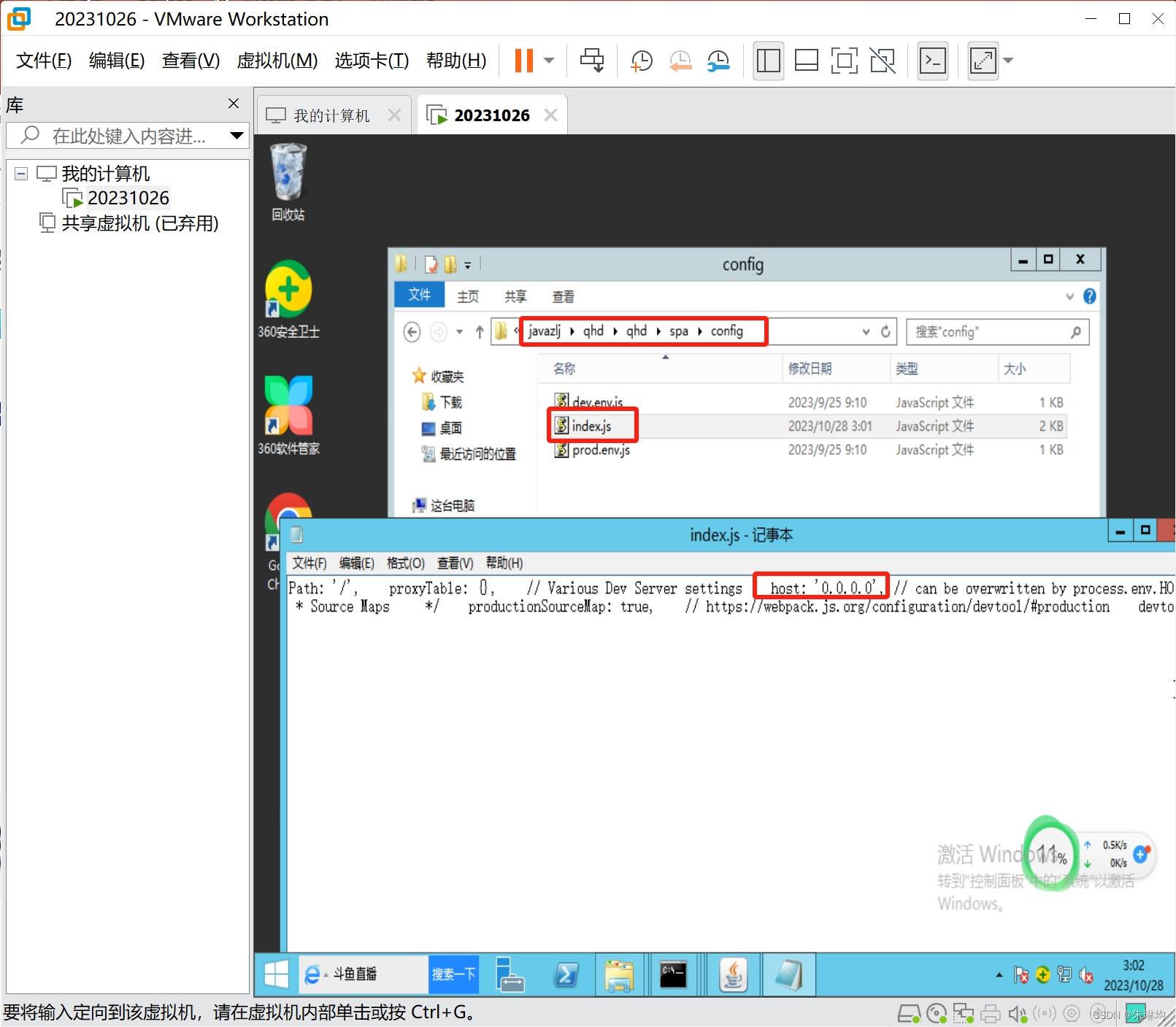
J2EE项目部署与发布(Windows版本)->会议OA单体项目Windows部署,spa前后端分离项目Windows部署
会议OA单体项目Windows部署spa前后端分离项目Windows部署 1.会议OA单体项目Windows部署(以实施的角度) 将项目放入webapp,项目能够访问: 首先拿到war包和数据库脚本,并检查是否有什么问题。 如何查看项目报错信息(当你…...
Lua脚本语言
1. 概念 Lua(发音为"loo-ah",葡萄牙语中的"lua"意为月亮)是一种轻量级的、高效的、可嵌入的脚本编程语言。官网Lua最初由巴西计算机科学家Roberto Ierusalimschy、Waldemar Celes和Luiz Henrique de Figueiredo于1993年开…...
函数和print()函数的区别)
cat()函数和print()函数的区别
目录 区别一: 区别二: cat、print函数都是输出函数。 区别一: cat()函数不能赋值; print()函数可以赋值。 x<-cat("hello world") //赋值 hello world x //cat函数无返回值 NULLy<-print("hello …...

宝塔面板安装Python和Flask(新版Python项目)
(一)宝塔面板的项目菜单,打开Python项目的“项目版本管理” 安装Python版本3.10.0。 会创建一个Python版本的文件夹www/server/pyproject_evn/versions/ 会创建一个Python虚拟环境的文件夹www/server/pyproject_evn/python_venv/ …...
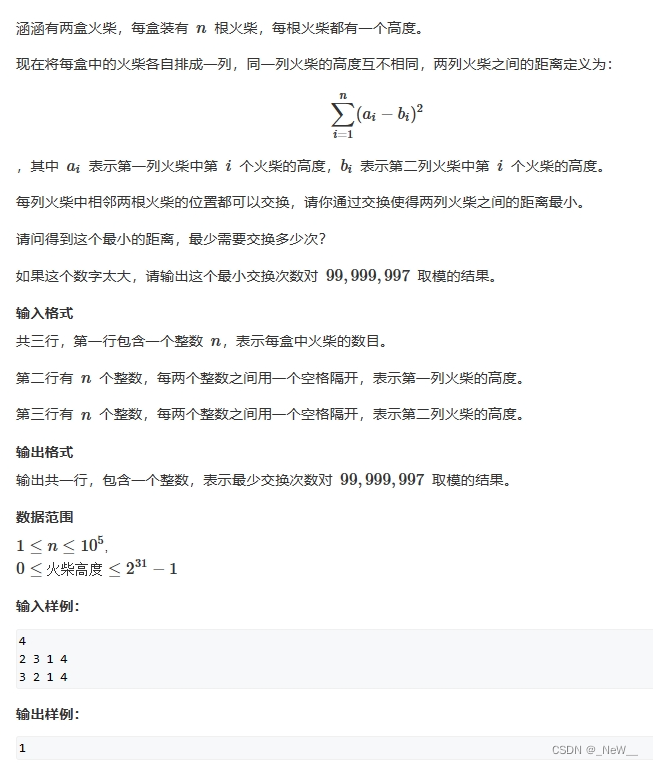
火柴排队.
题意:给两列火柴,可以交换任意相邻的火柴,使得(ai-bi)^2的和最小,求最小交换次数。 分析:使得(ai-bi)^2的和最小,即a^2-2abb^2的和最小,那么使得2ab最大,就可…...

改善游戏体验:数据分析与可视化的威力
当今,电子游戏已经超越了娱乐,成为一种文化现象,汇聚了全球数十亿的玩家。游戏制作公司正采用越来越复杂的技术来提高游戏质量,同时游戏数据分析和可视化工具变得不可或缺。 数据的力量:解析游戏体验 游戏制作涉及到大…...

GEE:本地影像上传到GEE的Assets中,并输入机器学习算法中作为特征变量
作者:CSDN @ _养乐多_ 当我们在 Google Earth Engine(GEE)中应用机器学习算法时,会输入一些影像作为特征变量数据,进一步根据这些特征影像去推理未知区域的数据。但是 GEE 平台上计算特征变量的 API 函数并不是非常全面,我们希望获得更多的特征用于分类。这个时候,我们…...
【Mybatis源码】XMLConfigBuilder构建器 - 读取XML配置初始化Configuration对象
XMLConfigBuilder是Mybatis中定义的进行构建Configuration对象的类,此类用于读取XML配置文件创建并初始化Configuration对象; 上一篇中我们介绍了XMLConfigBuilder构建器加载XML配置文件以及创建Configuration对象https://blog.csdn.net/m1729339749/article/details/133983…...
Python算法练习 10.28
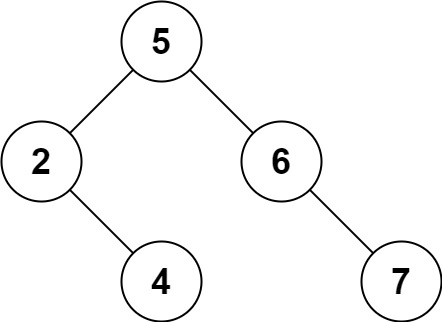
leetcode 700 二叉搜索树中的搜索 给定二叉搜索树(BST)的根节点 root 和一个整数值 val。 你需要在 BST 中找到节点值等于 val 的节点。 返回以该节点为根的子树。 如果节点不存在,则返回 null 。 示例 1: 输入:root [4,2,7,1,…...
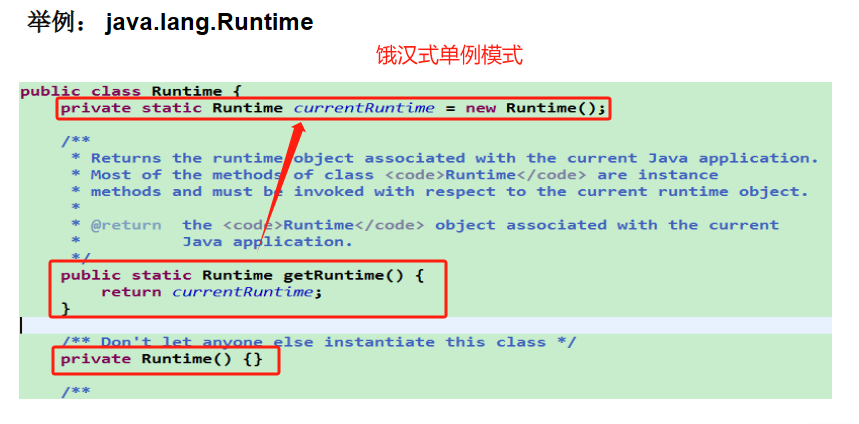
【java学习—八】单例设计模式(5)
文章目录 1. 相关概念2. 单例设计模式-饿汉式3. 单例设计模式-懒汉式4. 总结 1. 相关概念 单例:只有一个实例(实例化对象) 设计模式是在大量的实践中总结和理论化之后优选的代码结构、编程风格、以及解决问题的思考方式。设计模式就像是经典的…...
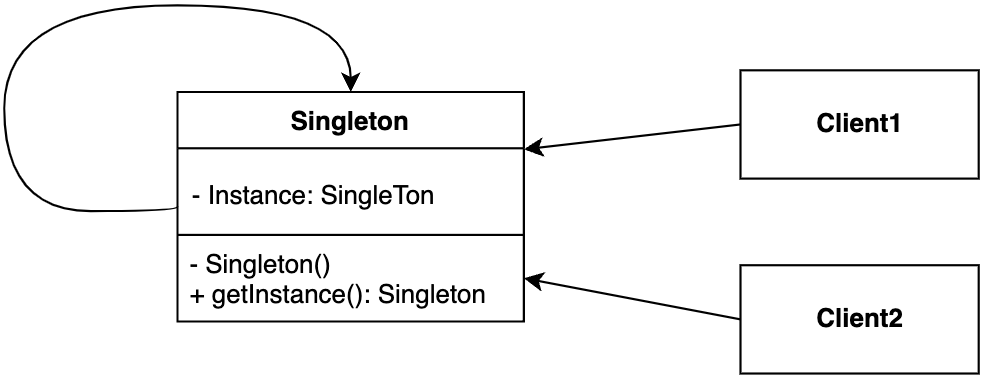
【设计模式】第4节:创建型模式之“单例模式”
一、介绍 采取一定的方法保证在整个的软件系统中,对某个类只能存在一个对象实例,并且该类只提供一个取得其对象实例的方法。 不使用单例模式的UML类图: 使用单例模式的UML类图: 使用场景: 需要频繁创建或销毁的对象…...

NodeJS爬取墨刀上的设计图片
背景 设计人员分享了一个墨刀的原型图,但是给的是只读权限,无法下载其中的素材;开发时想下载里面的一张动图,通过浏览器的F12工具在页面结构找到了图片地址。 但是浏览器直接访问后发现没权限: Nginx 的 403 页面。。…...
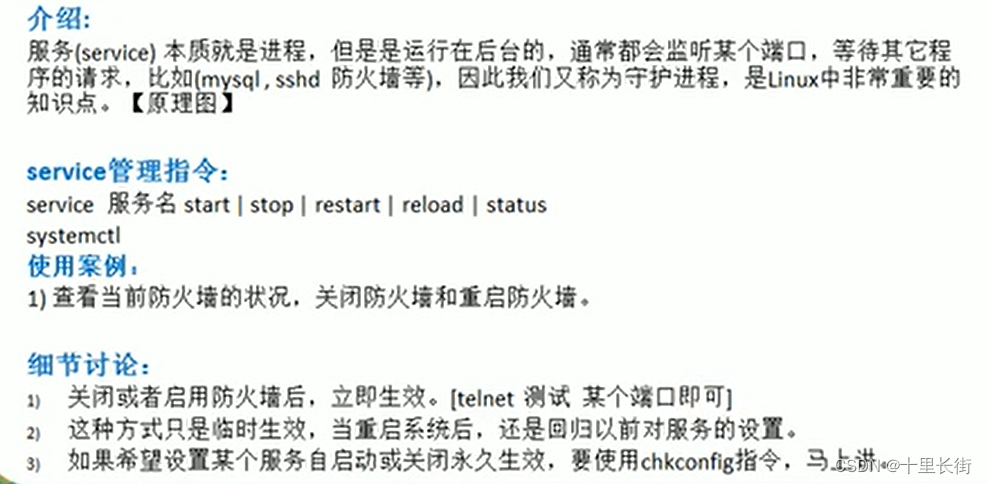
linux--
一、crond 任务调度 1、原理示意图 2、crontab 进行定时任务的设置 2.1. 概述 任务调度,是指系统在某个时间执行的特定的命令或程序。任务调度分类: 系统工作: 有些重要的工作必须周而复始地执行。如病毒扫描等 个别用户工作:个别用户可能希望执行某些…...

服务器日志分析实战:用Python追踪HTTP 404错误并可视化异常频率
作为一名爬虫开发者或网站运维人员,服务器日志就像飞机的“黑匣子”——它记录了每个请求的来龙去脉。而404错误(页面未找到)尤其值得关注:它可能是用户输错了网址,可能是你爬虫的URL构造逻辑有漏洞,也可能是网站改版后旧的链接失效了。更严重的是,大量突然涌出的404请求…...
做电影评论情感分类)
告别数据饥荒:用PyTorch手把手实现原型网络(Prototypical Networks)做电影评论情感分类
告别数据饥荒:用PyTorch手把手实现原型网络做电影评论情感分类 在自然语言处理领域,情感分析一直是热门研究方向,但现实中的开发者常面临一个尴尬困境:标注数据太少。传统深度学习方法动辄需要成千上万的标注样本,而实…...

关联规则挖掘在Calabi-Yau流形Hodge数分析中的应用与复现
1. 项目概述:当数据挖掘遇见高维几何在理论物理和代数几何的交叉领域,Calabi-Yau流形一直扮演着核心角色。这些具有特殊拓扑结构的空间,不仅是弦理论中额外维度紧化的关键候选者,其本身丰富的数学性质也吸引着无数研究者。然而&am…...

Unity Visual Scripting不是拖拽玩具:中阶开发者的编程范式重构指南
1. 为什么Unity官方Visual Scripting不是“拖拽完就能跑”的玩具,而是一套需要重新理解的编程范式很多人第一次点开Unity的Visual Scripting(VS)面板时,看到那些五颜六色的节点和丝滑的连线,下意识觉得:“这…...

LangGraph状态机工程:构建复杂AI工作流的完整指南
传统RAG(检索增强生成)在处理简单的"单跳"问题时表现良好——“文章里提到了什么” “这个概念是什么意思”——但当问题涉及多个实体之间的关系、需要跨多个文档推理时,传统RAG就显得力不从心。GraphRAG(Graph-based R…...
从模糊到电影级景深:Midjourney + Topaz Gigapixel联调方案(含LUT预设包+PSD分层模板)
更多请点击: https://codechina.net 第一章:从模糊到电影级景深:Midjourney Topaz Gigapixel联调方案(含LUT预设包PSD分层模板) 当Midjourney生成的图像存在主体边缘柔化、背景层次缺失或分辨率不足等问题时…...

京东自动购物终极指南:告别缺货烦恼,智能抢购神器
京东自动购物终极指南:告别缺货烦恼,智能抢购神器 【免费下载链接】Jd-Auto-Shopping 京东商品补货监控及自动下单 项目地址: https://gitcode.com/gh_mirrors/jd/Jd-Auto-Shopping 还在为心仪商品瞬间售罄而苦恼吗?还在熬夜等待补货却…...

Arduino土壤湿度监测仪制作:从传感器原理到自动灌溉实现
1. 项目概述:用Arduino Uno和LCD屏打造你的土壤湿度监测仪作为一个喜欢在阳台种点番茄、辣椒的业余园丁,我经常为浇水这事儿头疼。浇多了怕烂根,浇少了又怕旱着,光靠手指插土里感觉,实在是不准。后来玩上了Arduino&…...

Taotoken的Token Plan套餐如何帮助项目更可控地预估成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的Token Plan套餐如何帮助项目更可控地预估成本 对于项目管理者或独立开发者而言,在集成大模型能力时…...
)
Sora 2原生MP4输出不兼容Premiere Pro?揭秘H.264/H.265封装层4大隐性缺陷(附MediaInfo诊断模板+自动修复脚本)
更多请点击: https://codechina.net 第一章:Sora 2原生MP4输出不兼容Premiere Pro的根源定位 Sora 2生成的原生MP4文件虽符合ISO/IEC 14496-14规范,但其底层封装结构与Adobe Premiere Pro对时间码、元数据及视频流编码参数的严格校验逻辑存在…...