【阅读和学习代码】VoxelNet
文章目录
- 将点特征 转换为 voxel 特征
- 稀疏张量 到 稠密张量,反向索引
- 参考博客
将点特征 转换为 voxel 特征
https://github.com/skyhehe123/VoxelNet-pytorch/blob/master/data/kitti.py
【Python】np.unique() 介绍与使用
self.T : # maxiumum number of points per voxel
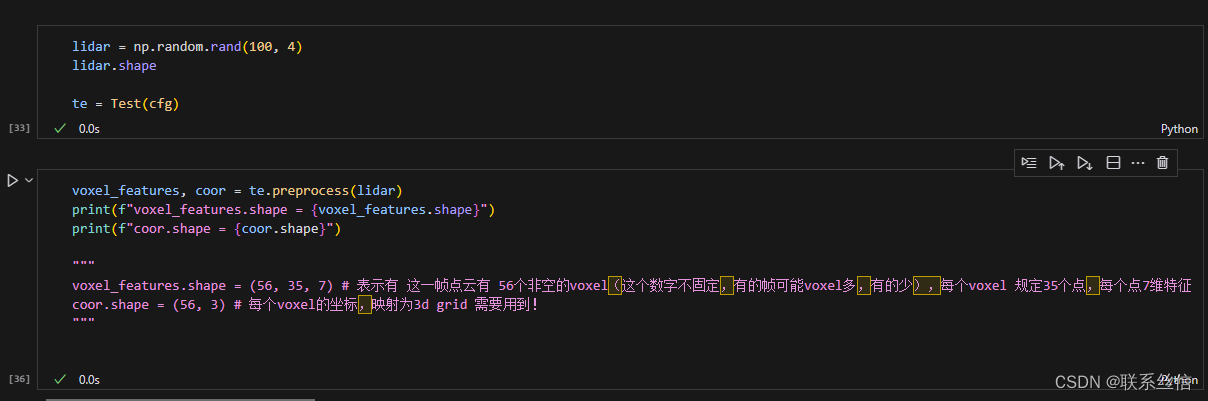
def preprocess(self, lidar):# shuffling the pointsnp.random.shuffle(lidar)voxel_coords = ((lidar[:, :3] - np.array([self.xrange[0], self.yrange[0], self.zrange[0]])) / (self.vw, self.vh, self.vd)).astype(np.int32)# convert to (D, H, W)voxel_coords = voxel_coords[:,[2,1,0]]voxel_coords, inv_ind, voxel_counts = np.unique(voxel_coords, axis=0, \return_inverse=True, return_counts=True)voxel_features = []for i in range(len(voxel_coords)):voxel = np.zeros((self.T, 7), dtype=np.float32)pts = lidar[inv_ind == i] # 落到同一个voxel上的 点if voxel_counts[i] > self.T:pts = pts[:self.T, :]voxel_counts[i] = self.T# augment the pointsvoxel[:pts.shape[0], :] = np.concatenate((pts, pts[:, :3] - np.mean(pts[:, :3], 0)), axis=1)voxel_features.append(voxel)return np.array(voxel_features), voxel_coords
输入,输出解释
稀疏张量 到 稠密张量,反向索引
https://github.com/skyhehe123/VoxelNet-pytorch/blob/master/voxelnet.py
和 chatgpt一起学习的代码:
import torch.nn as nn
import torch.nn.functional as F
import torch
from torch.autograd import Variable
from config import config as cfg# conv2d + bn + relu
class Conv2d(nn.Module):def __init__(self,in_channels,out_channels,k,s,p, activation=True, batch_norm=True):super(Conv2d, self).__init__()self.conv = nn.Conv2d(in_channels,out_channels,kernel_size=k,stride=s,padding=p)if batch_norm:self.bn = nn.BatchNorm2d(out_channels)else:self.bn = Noneself.activation = activationdef forward(self,x):x = self.conv(x)if self.bn is not None:x=self.bn(x)if self.activation:return F.relu(x,inplace=True)else:return x# conv3d + bn + relu
class Conv3d(nn.Module):def __init__(self, in_channels, out_channels, k, s, p, batch_norm=True):super(Conv3d, self).__init__()self.conv = nn.Conv3d(in_channels, out_channels, kernel_size=k, stride=s, padding=p)if batch_norm:self.bn = nn.BatchNorm3d(out_channels)else:self.bn = Nonedef forward(self, x):x = self.conv(x)if self.bn is not None:x = self.bn(x)return F.relu(x, inplace=True)# Fully Connected Network
class FCN(nn.Module):def __init__(self,cin,cout):super(FCN, self).__init__()self.cout = coutself.linear = nn.Linear(cin, cout)self.bn = nn.BatchNorm1d(cout)def forward(self,x):# KK is the stacked k across batchkk, t, _ = x.shapex = self.linear(x.view(kk*t,-1))x = F.relu(self.bn(x))return x.view(kk,t,-1)# Voxel Feature Encoding layer
class VFE(nn.Module):def __init__(self,cin,cout):super(VFE, self).__init__()assert cout % 2 == 0self.units = cout // 2self.fcn = FCN(cin,self.units)def forward(self, x, mask): # x: [N, T, C] : # N:一个batch voxel 的数量,不固定# point-wise feauturepwf = self.fcn(x)#locally aggregated featurelaf = torch.max(pwf,1)[0].unsqueeze(1).repeat(1,cfg.T,1) # laf:[N, T, cout // 2]# point-wise concat featurepwcf = torch.cat((pwf,laf),dim=2)# apply maskmask = mask.unsqueeze(2).repeat(1, 1, self.units * 2) # mask作用: 一个voxel T=35 个点,不够T个点则用0填充,但在计算时 不考虑这些0pwcf = pwcf * mask.float()return pwcf # [N, T, Cout]# Stacked Voxel Feature Encoding
class SVFE(nn.Module):def __init__(self):super(SVFE, self).__init__()self.vfe_1 = VFE(7,32)self.vfe_2 = VFE(32,128)self.fcn = FCN(128,128)def forward(self, x):mask = torch.ne(torch.max(x,2)[0], 0)x = self.vfe_1(x, mask)x = self.vfe_2(x, mask)x = self.fcn(x)# element-wise max poolingx = torch.max(x,1)[0]return x # Convolutional Middle Layer
class CML(nn.Module):def __init__(self):super(CML, self).__init__()self.conv3d_1 = Conv3d(128, 64, 3, s=(2, 1, 1), p=(1, 1, 1))self.conv3d_2 = Conv3d(64, 64, 3, s=(1, 1, 1), p=(0, 1, 1))self.conv3d_3 = Conv3d(64, 64, 3, s=(2, 1, 1), p=(1, 1, 1))def forward(self, x): x = self.conv3d_1(x)x = self.conv3d_2(x)x = self.conv3d_3(x)return x# # Region Proposal Network
# class RPN(nn.Module):
# def __init__(self):
# super(RPN, self).__init__()
# self.block_1 = [Conv2d(128, 128, 3, 2, 1)]
# self.block_1 += [Conv2d(128, 128, 3, 1, 1) for _ in range(3)]
# self.block_1 = nn.Sequential(*self.block_1)# self.block_2 = [Conv2d(128, 128, 3, 2, 1)]
# self.block_2 += [Conv2d(128, 128, 3, 1, 1) for _ in range(5)]
# self.block_2 = nn.Sequential(*self.block_2)# self.block_3 = [Conv2d(128, 256, 3, 2, 1)]
# self.block_3 += [nn.Conv2d(256, 256, 3, 1, 1) for _ in range(5)]
# self.block_3 = nn.Sequential(*self.block_3)# self.deconv_1 = nn.Sequential(nn.ConvTranspose2d(256, 256, 4, 4, 0),nn.BatchNorm2d(256))
# self.deconv_2 = nn.Sequential(nn.ConvTranspose2d(128, 256, 2, 2, 0),nn.BatchNorm2d(256))
# self.deconv_3 = nn.Sequential(nn.ConvTranspose2d(128, 256, 1, 1, 0),nn.BatchNorm2d(256))# self.score_head = Conv2d(768, cfg.anchors_per_position, 1, 1, 0, activation=False, batch_norm=False)
# self.reg_head = Conv2d(768, 7 * cfg.anchors_per_position, 1, 1, 0, activation=False, batch_norm=False)# def forward(self,x):
# x = self.block_1(x)
# x_skip_1 = x
# x = self.block_2(x)
# x_skip_2 = x
# x = self.block_3(x)
# x_0 = self.deconv_1(x)
# x_1 = self.deconv_2(x_skip_2)
# x_2 = self.deconv_3(x_skip_1)
# x = torch.cat((x_0,x_1,x_2),1)
# return self.score_head(x),self.reg_head(x)class VoxelNet(nn.Module):def __init__(self):super(VoxelNet, self).__init__()self.svfe = SVFE()self.cml = CML()# self.rpn = RPN()def voxel_indexing(self, sparse_features, coords): # sparse_features:[N, C]: # N: 一个batch voxel的数量,不固定dim = sparse_features.shape[-1]dense_feature = Variable(torch.zeros(dim, cfg.N, cfg.D, cfg.H, cfg.W).cuda()) # cfg.N = batch"""这段代码的操作可以通过一个for循环来实现,但是需要注意,使用for循环的效率通常会比使用向量化操作低。下面是一个可能的实现:for i in range(len(coords)):dense_feature[:, coords[i,0], coords[i,1], coords[i,2], coords[i,3]] = sparse_features[i]这个for循环遍历coords的每一行(即每一个坐标),然后在dense_feature中找到对应的位置,将sparse_features中的对应元素赋给这个位置。这与原始代码的操作是一样的。但是,需要注意的是,这种方法的效率通常会比使用向量化操作低,特别是当处理大量数据时。在实际的代码中,我们通常会优先使用向量化操作,因为它们可以利用现代硬件的并行计算能力,从而大大提高计算效率这是一种常见的将稀疏张量转换为密集张量的方法。在稀疏张量中,只存储非零元素和它们的位置,而在密集张量中,所有元素都被存储。
这段代码就是在将 sparse_features 中的元素放入 dense_feature 的对应位置,从而将稀疏表示转换为密集表示。"""dense_feature[:, coords[:,0], coords[:,1], coords[:,2], coords[:,3]]= sparse_features# dense_feature:[C, B, D, H, W]return dense_feature.transpose(0, 1) # dense_feature:[B, C, D, H, W] # 这样就转换为稠密张量了 def forward(self, voxel_features, voxel_coords): # voxel_features:[N, T, C] # N:一个batch voxel的数量,每个voxel 35个点,每个点 C维# voxel_coords:[N, 4] , [batch_id, x, y, z]# feature learning networkvwfs = self.svfe(voxel_features)print(f"vwfs.shape = {vwfs.shape}") # [N, C]vwfs = self.voxel_indexing(vwfs,voxel_coords) # index 反向索引print(f"voxel_indexing ==> vwfs.shape = {vwfs.shape}") # # convolutional middle network# cml_out = self.cml(vwfs)# region proposal network# merge the depth and feature dim into one, output probability score map and regression map# psm,rm = self.rpn(cml_out.view(cfg.N,-1,cfg.H, cfg.W))# return psm, rmif __name__ == '__main__':model = VoxelNet()voxel_features = torch.rand(100, 35, 7)voxel_coords = torch.randint(low=0, high=10, size=(100, 4))model(voxel_features, voxel_coords)
参考博客
VoxelNet End-to-End Learning for Point Cloud Based 3D Object Detection 论文学习
VoxelNet:基于点云的端到端 3D 物体检测网络
相关文章:
【阅读和学习代码】VoxelNet
文章目录 将点特征 转换为 voxel 特征稀疏张量 到 稠密张量,反向索引参考博客 将点特征 转换为 voxel 特征 https://github.com/skyhehe123/VoxelNet-pytorch/blob/master/data/kitti.py 【Python】np.unique() 介绍与使用 self.T : # maxiumum numbe…...

【23种设计模式】接口隔离原则
个人主页:金鳞踏雨 个人简介:大家好,我是金鳞,一个初出茅庐的Java小白 目前状况:22届普通本科毕业生,几经波折了,现在任职于一家国内大型知名日化公司,从事Java开发工作 我的博客&am…...

【Python机器学习】零基础掌握PartialDependenceDisplay检验、检查
如何更好地理解模型对特定特征的依赖性?如何使用历史数据来预测明天股票市场的走势? 想象一下,作为一名数据分析师,面对海量的数据,如何准确地预测明天股票市场的走势?这是一个复杂且具有挑战性的问题。但别担心,有一种神奇的工具可以帮助解析模型对各种因素(特征)的…...
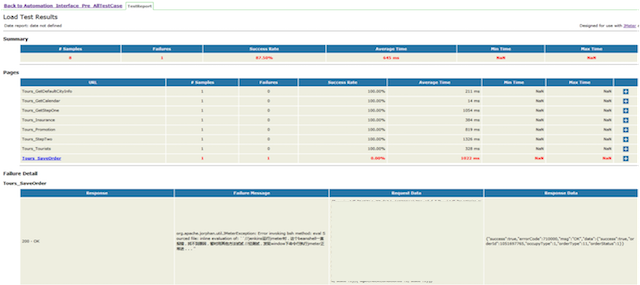
Jmeter的接口自动化测试
在去年实施了一年的三端(PC、无线M站、无线APP【Android、IOS】)后,今年7月份开始,我们开始进行接口自动化的实施,目前已完成了整个框架的搭建以及接口的持续测试集成。今天做个简单的分享。 在开始自动化投入前&#…...

windows c++获取开机启动项
#include <iostream> #include <Windows.h> #include <string> #define RUN_LOCATION "Software\\Microsoft\\Windows\\CurrentVersion\\Run" int main() { HKEY hKey; LONG result; // 打开注册表键 result = RegOpenKeyExA(HKEY_CU…...
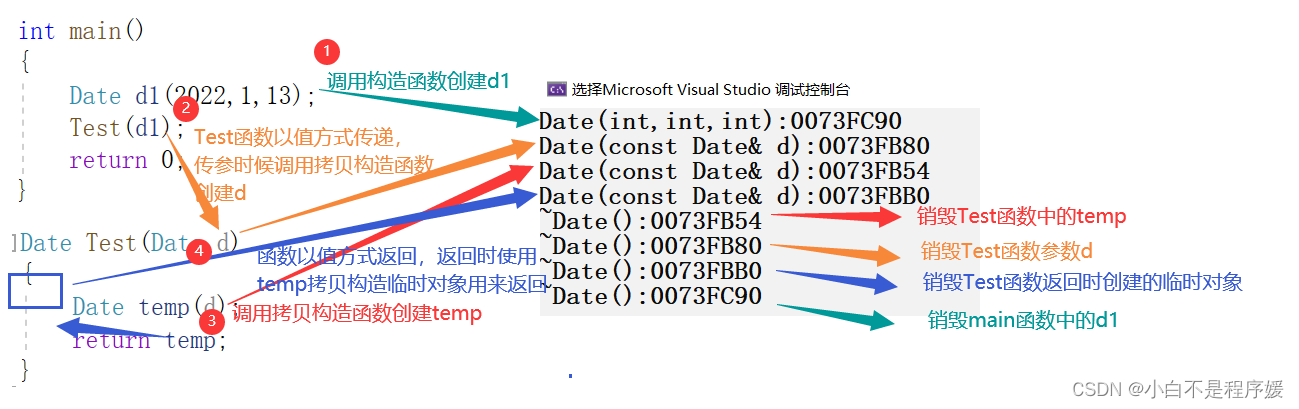
【C++初阶】类和对象——构造函数析构函数拷贝构造函数
个人主页点击直达:小白不是程序媛 C系列专栏:C头疼记 目录 前言 类的6个默认成员函数 构造函数 概念 构造函数的特性 析构函数 概念 析构函数特性 拷贝构造函数 概念 拷贝构造函数特性 总结 前言 上篇文章我们对于C中的类有了初步的认识和…...

Java实现SQL分页
在日常开发需要对数据进行分页,配置如下 <!-- baomidou --><dependency><groupId>com.baomidou</groupId><artifactId>mybatis-plus-boot-starter</artifactId><version>3.4.0</version></dependency> 在控…...
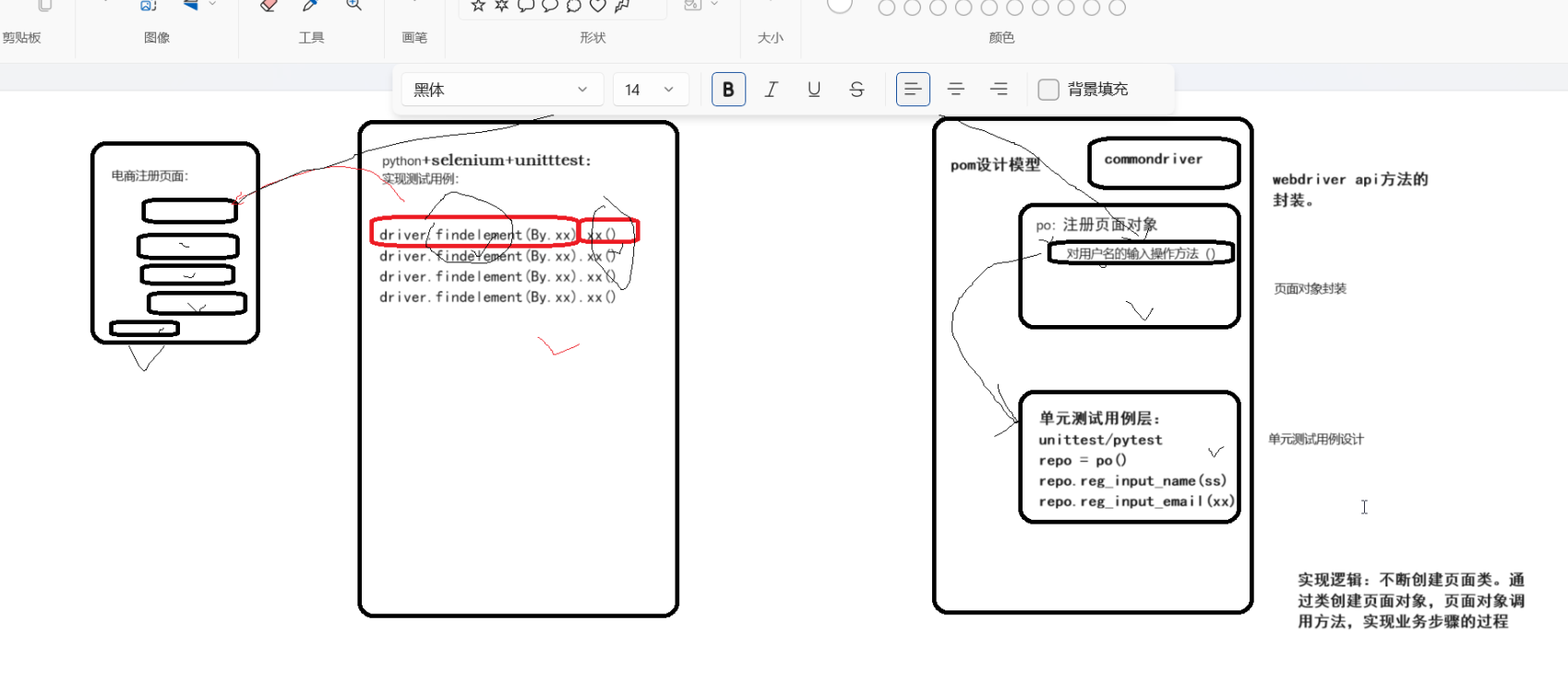
软件测试进阶篇----自动化测试脚本开发
自动化测试脚本开发 一、自动化测试用例开发 1、用例设计需要注意的点 2、设计一条测试用例 二、脚本开发过程中的技术 1、线性脚本开发 2、模块化脚本开发(封装线性代码到方法或者类中。在需要的地方进行调用) 3、关键字驱动开发:selen…...

rust std
目录 一,std基本数据结构 1,std::option 2,std::result 二,std容器 1,vector 三,std算法 1,排序 2,二分 (1)vector二分 (2)…...
)
SpringMVC(下)
1、拦截器: 1、拦截器的配置: SpringMVC中的拦截器用于拦截控制器方法的执行 SpringMVC中的拦截器需要实现HandlerInterceptor <!--配置拦截器--><mvc:interceptors><!--对所有的请求进行拦截--><!--<bean class"com.songzhishu.m…...

分布式操作系统的必要性及重要性
总有人在各个平台留言或者私信问LAXCUS分布式操作系统的各种问题,尤其是关于分布式操作系统的应用市场、价值、意义之类的问题。我们团队做LAXCUS分布式操作系统,也不是头脑凭空发热,是基于我们之前的大量产品设计、经验逐渐一步步做起来。当…...
【Javascript】定时器
目录 延迟执行 定时执行 清除定时任务 延迟执行 setTimeout(function(){}, 毫秒) console.log(1); console.log(2); console.log(3); setTimeout(function (){console.log(5) },5000) console.log(4);setTimeout(function (){ console.log(5) },5000) 设定了一个任务&…...
基于stm32的ADC读取烟雾报警器的数值
本文想要设计一个设计一个有stm32控制的烟雾报警系统。通过MQ-2烟雾报警器将获取模拟的数值传递给stm32的ADC外设并在串口助手上显示对应的电压值。烟雾报警器浓度越高,他的电压就越高,但是不会超过3.3V。设置一个电压临界值,当传输回来的电压…...
无需更换vue-cli 脚手架 uniapp-搭建项目-H5-低版本安卓IOS兼容问题(白屏)(接口请求异常)
✨求关注~ 💻博客:www.protaos.com I. 简介 A. UniApp项目概述 B. 白屏和接口请求异常问题的背景 II. 白屏问题 A. 问题描述 1、uniapp 打包H5内嵌入APP内、低版本手机系统访问白屏问题 B. 问题根本原因 1、低版本手机系统 自带的webview内核不支持ES6语…...

【IO面试题 四】、介绍一下Java的序列化与反序列化
文章底部有个人公众号:热爱技术的小郑。主要分享开发知识、学习资料、毕业设计指导等。有兴趣的可以关注一下。为何分享? 踩过的坑没必要让别人在再踩,自己复盘也能加深记忆。利己利人、所谓双赢。 面试官:介绍一下Java的序列化与…...
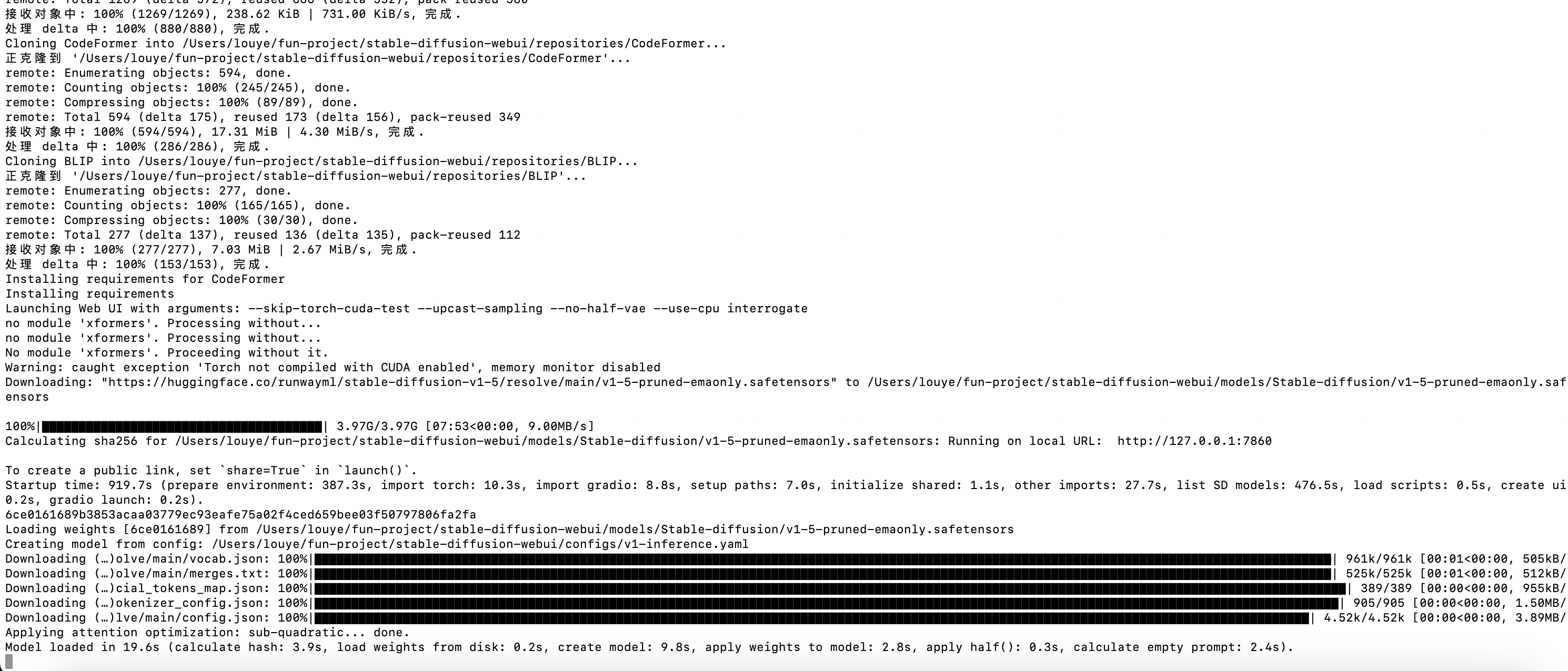
M1本地部署Stable Diffusion
下载安装 参考博客: 在Mac上部署Stable Diffusion(超详细,AI 绘画入门保姆级教程) 安装需要的依赖库 brew install cmake protobuf rust python3.10 git wget 可能中途会存在下载报错或者下载卡主的问题,需要切国内源 brew进行替换源: …...

java中的内存分配
目录 1.堆内存 2.栈内存 3.常量池 4.寄存器 5.示例 6.总结 1.堆内存 堆用来存放程序中动态生产的数据,如new出来的对象。 通过new方式创建的对象,数组及字符串都有自己的内存地址。 方法调用完毕后,方法中new出来的对象就会变成垃圾…...
Matter.js 插件:matter-wrap(世界是圆的)
本文简介 点赞 关注 收藏 学会了 记得以前看爆笑校园里有一集讲到,一个人对着前面开了一枪,过了一阵子弹打中他自己的后脑勺。作者想通过这个冷笑话告诉大家一件事:地球是圆的。 在 Matter.js 世界里,默认是没有边界的&#…...
)
HCIA --- ACL(访问控制列表)
ACL访问控制列表 一、作用 访问控制 --- 在路由器流量进或出的接口上,匹配流量产生动作---允许、拒绝定义感兴趣流量 --- 抓取流量,之后给到其他的策略,让其他策略进行工作; 二、匹配规则 至上而下逐一匹配,上条匹…...
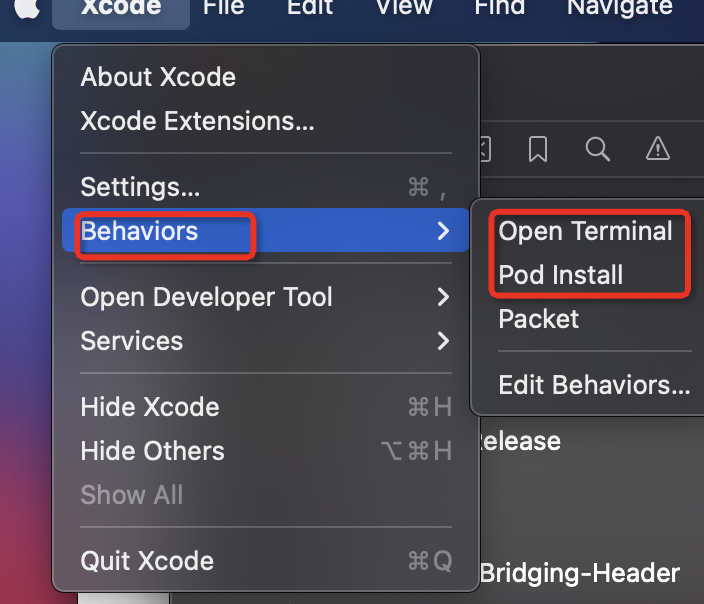
Xcode自定义快捷键
一、新建脚本 1. 编写脚本 把脚本sh文件保存在安全的目录,不会被删除 我这里主要是两个常用的: 1.打开终端: xcode-terminal.sh #!/bin/shif [ -n "$XcodeProjectPath" ]; then open -a Terminal "$XcodeProjectPath"/.. elseo…...

交叉拟合与Neyman正交性:驯服机器学习因果推断中的偏差
1. 项目概述:当机器学习遇见因果推断,我们如何驯服“偏差”这头猛兽?在数据科学和经济学交叉的前沿地带,任何一个试图用机器学习模型做因果推断的研究者或工程师,都绕不开一个核心的噩梦:偏差(B…...

基于C#实现的支持五笔和拼音输入的输入法
一、核心架构设计 二、关键代码实现 1. 输入法核心类 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72…...

ChatGPT翻译质量断崖式下滑的真相:当LLM遇上专业领域术语库缺失,这4种场景下错误率超61%——你的项目还在裸奔吗?
更多请点击: https://codechina.net 第一章:ChatGPT翻译质量怎么样 ChatGPT 在翻译任务中展现出较强的上下文理解能力与语言生成流畅性,但其质量受输入提示(prompt)设计、源语言复杂度、专业领域术语密度及目标语言语…...

OpenWebUI 到底解决了什么,没解决什么?
先说结论OpenWebUI 把多模型切换、对话管理、参数调整从命令行搬到了浏览器,交互体验接近 ChatGPT,但部署本身有硬性前提。免费内网穿透方案有 24 小时域名更换限制,固定域名需付费,远程访问稳定性取决于网络环境。对于只跑单个模…...

VideoSrt:重新定义本地化视频字幕生成的技术架构与实践范式
VideoSrt:重新定义本地化视频字幕生成的技术架构与实践范式 【免费下载链接】video-srt-windows 这是一个可以识别视频语音自动生成字幕SRT文件的开源 Windows-GUI 软件工具。 项目地址: https://gitcode.com/gh_mirrors/vi/video-srt-windows 在多媒体内容创…...
)
从云服务器到树莓派:不同场景下Linux IP地址类型的管理与查看技巧(ip/nmcli实战)
从云服务器到树莓派:Linux IP地址管理的场景化实战指南在混合计算环境中工作的开发者常常面临一个看似简单却充满陷阱的问题:如何快速确定当前Linux设备的IP地址类型?这个问题在公有云、本地虚拟机和嵌入式设备等不同场景下有着截然不同的答案…...

告别“一本正经的胡说八道”:神经符号 AI 正在定义下一代智能
告别“一本正经的胡说八道”:神经符号 AI 正在定义下一代智能 作为一名软件架构师,我们深知开发中的“真理”:代码必须是逻辑严密的,每一行逻辑都应有据可查。然而,当我们将现在的 LLM(大语言模型ÿ…...

7款完全免费的中文字体解决方案:思源宋体CN实战操作图谱
7款完全免费的中文字体解决方案:思源宋体CN实战操作图谱 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 还在为中文排版不够专业而烦恼吗?Source Han Serif CN&…...

027、原理图绘制进阶:总线、网络标号、层次图
027 原理图绘制进阶:总线、网络标号、层次图 从一块烧掉的板子说起 去年接手一个同事离职留下的项目,一块四层板,MCU挂了三片ADC、两片DAC、一个FPGA,外加一堆传感器。原理图打开那一刻,我差点把咖啡喷屏幕上——整张图就一张Sheet,密密麻麻的飞线像蜘蛛网,网络标号全…...

PubMed文献批量下载完整指南:5步快速获取百篇文献的免费工具
PubMed文献批量下载完整指南:5步快速获取百篇文献的免费工具 【免费下载链接】Pubmed-Batch-Download Batch download articles based on PMID (Pubmed ID) 项目地址: https://gitcode.com/gh_mirrors/pu/Pubmed-Batch-Download 你是否曾为手动下载PubMed文献…...