【ROS入门】机器人系统仿真——URDF集成Gazebo
文章结构
- URDF与Gazebo基本集成流程
- 创建功能包
- 编写URDF或Xacro文件
- 启动 Gazebo 并显示机器人模型
- URDF集成Gazebo相关设置
- collision
- inertial
- 颜色设置
- URDF集成Gazebo实操
- 编写封装惯性矩阵算法的 xacro 文件
- 复制相关 xacro 文件,并设置 collision inertial 以及 color 等参数
- 在 launch 文件中启动 gazebo 并添加机器人模型
URDF与Gazebo基本集成流程
URDF 与 Gazebo 集成流程与 Rviz 实现类似,主要步骤如下:
创建功能包
创建功能包,导入依赖项:urdf、xacro、gazebo_ros、gazebo_ros_control、gazebo_plugins
编写URDF或Xacro文件
<robot name="mycar"><link name="base_link"><visual><geometry><box size="0.5 0.2 0.1" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="yellow"><color rgba="0.5 0.3 0.0 1" /></material></visual><collision><geometry><box size="0.5 0.2 0.1" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /></collision><inertial><origin xyz="0 0 0" /><mass value="6" /><inertia ixx="1" ixy="0" ixz="0" iyy="1" iyz="0" izz="1" /></inertial></link><gazebo reference="base_link"><material>Gazebo/Red</material></gazebo>
</robot>
注意, 当 URDF 需要与 Gazebo 集成时,和 Rviz 有明显区别:
-
必须使用
collision标签,因为既然是仿真环境,那么必然涉及到碰撞检测,collision 提供碰撞检测的依据。 -
必须使用
inertial标签,此标签标注了当前机器人某个刚体部分的惯性矩阵,用于一些力学相关的仿真计算。 -
颜色设置,也需要重新使用
gazebo标签标注,因为之前的颜色设置为了方便调试包含透明度,仿真环境下没有此选项。而且如果没设置的话,Gazebo环境里头是看不到机器人的(气急败坏)
启动 Gazebo 并显示机器人模型
launch文件实现:
<launch><!-- 将 Urdf 文件的内容加载到参数服务器 --><param name="robot_description" textfile="$(find URDF_Gazebo)/urdf/demo01.urdf" /><!-- 启动 gazebo 的仿真环境,当前环境为空环境 --><include file="$(find gazebo_ros)/launch/empty_world.launch" /><!-- 在 Gazebo 中加载一个机器人模型,该功能由 gazebo_ros 下的 spawn_model 提供:-urdf 加载的是 urdf 文件-model mycar 模型名称是 mycar-param robot_description 从参数 robot_description 中载入模型-x 模型载入的 x 坐标-y 模型载入的 y 坐标-z 模型载入的 z 坐标
--><node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" />
</launch>
实现效果:
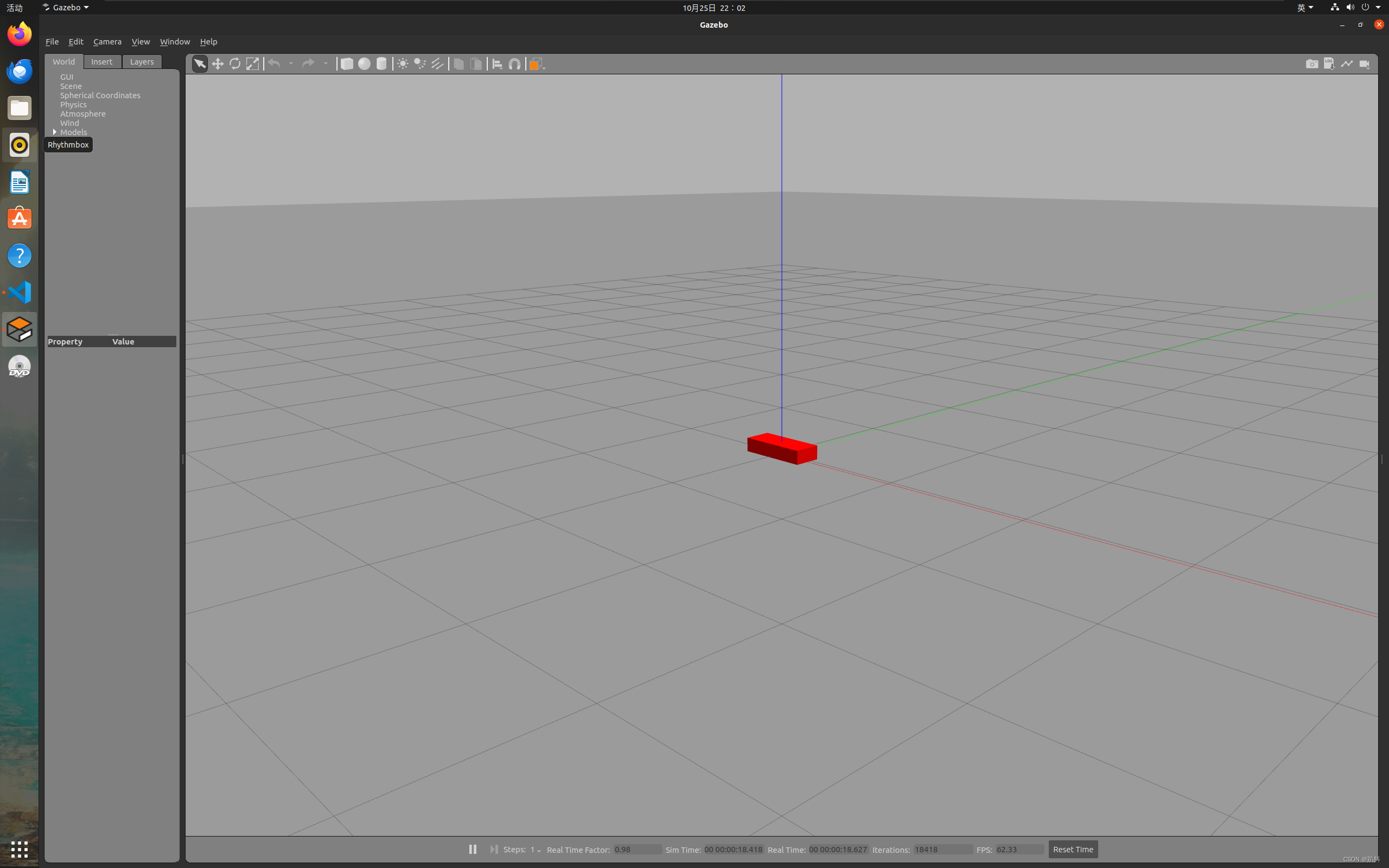
URDF集成Gazebo相关设置
较之于 rviz,gazebo在集成 URDF 时,需要做些许修改,比如:必须添加 collision 碰撞属性相关参数、必须添加 inertial 惯性矩阵相关参数,另外,如果直接移植 Rviz 中机器人的颜色设置是没有显示的,颜色设置也必须做相应的变更。
collision
如果机器人link是标准的几何体形状,和link的 visual 属性设置一致即可。
inertial
惯性矩阵的设置需要结合link的质量与外形参数动态生成,标准的球体、圆柱与立方体的惯性矩阵公式如下(已经封装为 xacro 实现):
球体惯性矩阵
<xacro:macro name="sphere_inertial_matrix" params="m r"><inertial><mass value="${m}" /><inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"iyy="${2*m*r*r/5}" iyz="0" izz="${2*m*r*r/5}" /></inertial>
</xacro:macro>
圆柱惯性矩阵
<xacro:macro name="cylinder_inertial_matrix" params="m r h"><inertial><mass value="${m}" /><inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"iyy="${m*(3*r*r+h*h)/12}" iyz = "0"izz="${m*r*r/2}" /> </inertial>
</xacro:macro>
立方体惯性矩阵
<xacro:macro name="Box_inertial_matrix" params="m l w h"><inertial><mass value="${m}" /><inertia ixx="${m*(h*h + l*l)/12}" ixy = "0" ixz = "0"iyy="${m*(w*w + l*l)/12}" iyz= "0"izz="${m*(w*w + h*h)/12}" /></inertial>
</xacro:macro>
需要注意的是,原则上,除了 base_footprint 外,机器人的每个刚体部分都需要设置惯性矩阵,且惯性矩阵必须经计算得出,如果随意定义刚体部分的惯性矩阵,那么可能会导致机器人在 Gazebo 中出现抖动,移动等现象。
颜色设置
在 gazebo 中显示 link 的颜色,必须要使用指定的标签:
<gazebo reference="link节点名称"><material>Gazebo/Blue</material>
</gazebo>
URDF集成Gazebo实操
需求描述: 将之前的机器人模型(xacro版)显示在 gazebo 中
编写封装惯性矩阵算法的 xacro 文件
head.xacro
<robot name="base" xmlns:xacro="http://wiki.ros.org/xacro"><!-- Macro for inertia matrix --><xacro:macro name="sphere_inertial_matrix" params="m r"><inertial><mass value="${m}" /><inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"iyy="${2*m*r*r/5}" iyz="0" izz="${2*m*r*r/5}" /></inertial></xacro:macro><xacro:macro name="cylinder_inertial_matrix" params="m r h"><inertial><mass value="${m}" /><inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"iyy="${m*(3*r*r+h*h)/12}" iyz = "0"izz="${m*r*r/2}" /> </inertial></xacro:macro><xacro:macro name="Box_inertial_matrix" params="m l w h"><inertial><mass value="${m}" /><inertia ixx="${m*(h*h + l*l)/12}" ixy = "0" ixz = "0"iyy="${m*(w*w + l*l)/12}" iyz= "0"izz="${m*(w*w + h*h)/12}" /></inertial></xacro:macro>
</robot>
复制相关 xacro 文件,并设置 collision inertial 以及 color 等参数
底盘Xacro文件:demo05_car_base.urdf.xacro
<!--使用 xacro 优化 URDF 版的小车底盘实现:实现思路:1.将一些常量、变量封装为 xacro:property比如:PI 值、小车底盘半径、离地间距、车轮半径、宽度 ....2.使用 宏 封装驱动轮以及支撑轮实现,调用相关宏生成驱动轮与支撑轮-->
<!-- 根标签,必须声明 xmlns:xacro -->
<robot name="mycar" xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- 封装变量、常量 --><!-- PI 值设置精度需要高一些,否则后续车轮翻转量计算时,可能会出现肉眼不能察觉的车轮倾斜,从而导致模型抖动 --><xacro:property name="PI" value="3.1415926"/><!-- 宏:黑色设置 --><material name="black"><color rgba="0.0 0.0 0.0 1.0" /></material><!-- 底盘属性 --><xacro:property name="base_footprint_radius" value="0.001" /> <!-- base_footprint 半径 --><xacro:property name="base_link_radius" value="0.1" /> <!-- base_link 半径 --><xacro:property name="base_length" value="0.08" /> <!-- base_link 长 --><xacro:property name="earth_space" value="0.015" /> <!-- 离地间距 --><xacro:property name="base_link_m" value="0.5" /> <!-- 质量 --><!-- 底盘 --><link name="base_footprint"><visual><geometry><sphere radius="${base_footprint_radius}" /></geometry></visual></link><link name="base_link"><visual><geometry><cylinder radius="${base_link_radius}" length="${base_length}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="yellow"><color rgba="0.5 0.3 0.0 0.5" /></material></visual><collision><geometry><cylinder radius="${base_link_radius}" length="${base_length}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /></collision><xacro:cylinder_inertial_matrix m="${base_link_m}" r="${base_link_radius}" h="${base_length}" /></link><joint name="base_link2base_footprint" type="fixed"><parent link="base_footprint" /><child link="base_link" /><origin xyz="0 0 ${earth_space + base_length / 2 }" /></joint><gazebo reference="base_link"><material>Gazebo/Yellow</material></gazebo><!-- 驱动轮 --><!-- 驱动轮属性 --><xacro:property name="wheel_radius" value="0.0325" /><!-- 半径 --><xacro:property name="wheel_length" value="0.015" /><!-- 宽度 --><xacro:property name="wheel_m" value="0.05" /> <!-- 质量 --><!-- 驱动轮宏实现 --><xacro:macro name="add_wheels" params="name flag"><link name="${name}_wheel"><visual><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /><material name="black" /></visual><collision><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /></collision><xacro:cylinder_inertial_matrix m="${wheel_m}" r="${wheel_radius}" h="${wheel_length}" /></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_length / 2 - wheel_radius) }" /><axis xyz="0 1 0" /></joint><gazebo reference="${name}_wheel"><material>Gazebo/Red</material></gazebo></xacro:macro><xacro:add_wheels name="left" flag="1" /><xacro:add_wheels name="right" flag="-1" /><!-- 支撑轮 --><!-- 支撑轮属性 --><xacro:property name="support_wheel_radius" value="0.0075" /> <!-- 支撑轮半径 --><xacro:property name="support_wheel_m" value="0.03" /> <!-- 质量 --><!-- 支撑轮宏 --><xacro:macro name="add_support_wheel" params="name flag" ><link name="${name}_wheel"><visual><geometry><sphere radius="${support_wheel_radius}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="black" /></visual><collision><geometry><sphere radius="${support_wheel_radius}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /></collision><xacro:sphere_inertial_matrix m="${support_wheel_m}" r="${support_wheel_radius}" /></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="${flag * (base_link_radius - support_wheel_radius)} 0 ${-(base_length / 2 + earth_space / 2)}" /><axis xyz="1 1 1" /></joint><gazebo reference="${name}_wheel"><material>Gazebo/Red</material></gazebo></xacro:macro><xacro:add_support_wheel name="front" flag="1" /><xacro:add_support_wheel name="back" flag="-1" /></robot>
摄像头Xacro文件:demo06_car_camera.urdf.xacro
<!-- 摄像头相关的 xacro 文件 -->
<robot name="mycar" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 摄像头属性 --><xacro:property name="camera_length" value="0.01" /> <!-- 摄像头长度(x) --><xacro:property name="camera_width" value="0.025" /> <!-- 摄像头宽度(y) --><xacro:property name="camera_height" value="0.025" /> <!-- 摄像头高度(z) --><xacro:property name="camera_x" value="0.08" /> <!-- 摄像头安装的x坐标 --><xacro:property name="camera_y" value="0.0" /> <!-- 摄像头安装的y坐标 --><xacro:property name="camera_z" value="${base_length / 2 + camera_height / 2}" /> <!-- 摄像头安装的z坐标:底盘高度 / 2 + 摄像头高度 / 2 --><xacro:property name="camera_m" value="0.01" /> <!-- 摄像头质量 --><!-- 摄像头关节以及link --><link name="camera"><visual><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual><collision><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /></collision><xacro:Box_inertial_matrix m="${camera_m}" l="${camera_length}" w="${camera_width}" h="${camera_height}" /></link><joint name="camera2base_link" type="fixed"><parent link="base_link" /><child link="camera" /><origin xyz="${camera_x} ${camera_y} ${camera_z}" /></joint><gazebo reference="camera"><material>Gazebo/Blue</material></gazebo>
</robot>
雷达Xacro文件:demo07_car_laser.urdf.xacro
<!--小车底盘添加雷达
-->
<robot name="mycar" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 雷达支架 --><xacro:property name="support_length" value="0.15" /> <!-- 支架长度 --><xacro:property name="support_radius" value="0.01" /> <!-- 支架半径 --><xacro:property name="support_x" value="0.0" /> <!-- 支架安装的x坐标 --><xacro:property name="support_y" value="0.0" /> <!-- 支架安装的y坐标 --><xacro:property name="support_z" value="${base_length / 2 + support_length / 2}" /> <!-- 支架安装的z坐标:底盘高度 / 2 + 支架高度 / 2 --><xacro:property name="support_m" value="0.02" /> <!-- 支架质量 --><link name="support"><visual><geometry><cylinder radius="${support_radius}" length="${support_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="red"><color rgba="0.8 0.2 0.0 0.8" /></material></visual><collision><geometry><cylinder radius="${support_radius}" length="${support_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /></collision><xacro:cylinder_inertial_matrix m="${support_m}" r="${support_radius}" h="${support_length}" /></link><joint name="support2base_link" type="fixed"><parent link="base_link" /><child link="support" /><origin xyz="${support_x} ${support_y} ${support_z}" /></joint><gazebo reference="support"><material>Gazebo/White</material></gazebo><!-- 雷达属性 --><xacro:property name="laser_length" value="0.05" /> <!-- 雷达长度 --><xacro:property name="laser_radius" value="0.03" /> <!-- 雷达半径 --><xacro:property name="laser_x" value="0.0" /> <!-- 雷达安装的x坐标 --><xacro:property name="laser_y" value="0.0" /> <!-- 雷达安装的y坐标 --><xacro:property name="laser_z" value="${support_length / 2 + laser_length / 2}" /> <!-- 雷达安装的z坐标:支架高度 / 2 + 雷达高度 / 2 --><xacro:property name="laser_m" value="0.1" /> <!-- 雷达质量 --><!-- 雷达关节以及link --><link name="laser"><visual><geometry><cylinder radius="${laser_radius}" length="${laser_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual><collision><geometry><cylinder radius="${laser_radius}" length="${laser_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /></collision><xacro:cylinder_inertial_matrix m="${laser_m}" r="${laser_radius}" h="${laser_length}" /></link><joint name="laser2support" type="fixed"><parent link="support" /><child link="laser" /><origin xyz="${laser_x} ${laser_y} ${laser_z}" /></joint><gazebo reference="laser"><material>Gazebo/Black</material></gazebo>
</robot>
组合底盘、摄像头与雷达的 Xacro 文件:car.urdf.xacro
<!-- 组合小车底盘与摄像头 -->
<robot name="mycar" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:include filename="my_head.urdf.xacro" /><xacro:include filename="demo05_car_base.urdf.xacro"/><xacro:include filename="demo06_car_camera.urdf.xacro"/><xacro:include filename="demo07_car_laser.urdf.xacro"/>
</robot>
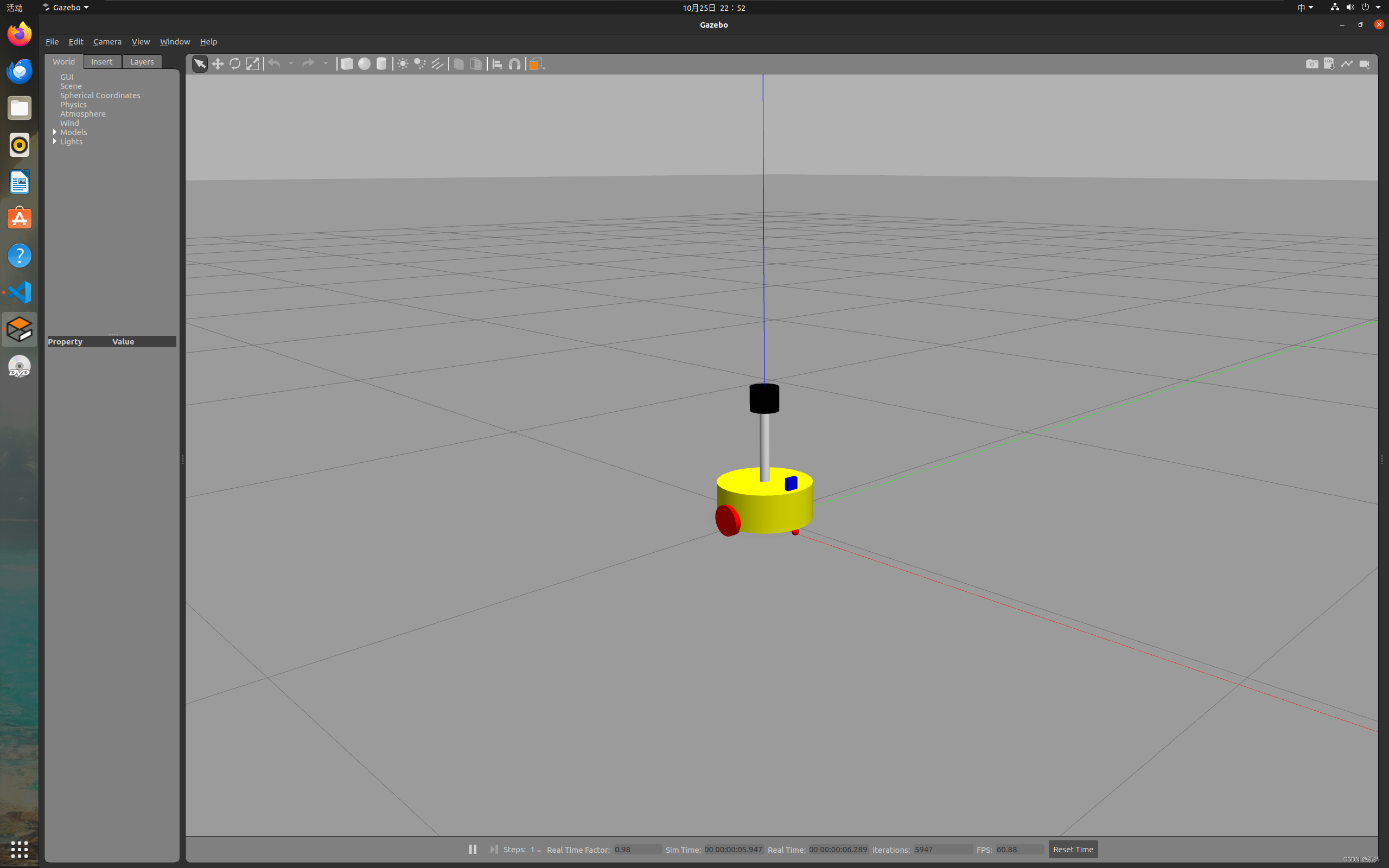
在 launch 文件中启动 gazebo 并添加机器人模型
launch文件:
<launch><!-- 将 Urdf 文件的内容加载到参数服务器 --><param name="robot_description" command="$(find xacro)/xacro $(find URDF_Gazebo)/urdf/xacro/car.urdf.xacro" /><!-- 启动 gazebo --><include file="$(find gazebo_ros)/launch/empty_world.launch" /><!-- 在 gazebo 中显示机器人模型 --><node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" />
</launch>
实现效果:
相关文章:
【ROS入门】机器人系统仿真——URDF集成Gazebo
文章结构 URDF与Gazebo基本集成流程创建功能包编写URDF或Xacro文件启动 Gazebo 并显示机器人模型 URDF集成Gazebo相关设置collisioninertial颜色设置 URDF集成Gazebo实操编写封装惯性矩阵算法的 xacro 文件复制相关 xacro 文件,并设置 collision inertial 以及 colo…...

互联多区域电网的负荷频率控制研究
摘要 电力行业的发展程度是衡量国民经济水平以及国家安全保障的一项重要指标。多区域负荷频率控制系统作为现代电力系统发展的重要趋势,在可靠性、经济性和稳定性上都具备一定的优势。保证系统稳定和输出电能的质量是电网运行的关键。电力系统输出电能质量的优劣取决…...
【java学习—九】模板方法(TemplateMethod)设计模式(4)
文章目录 1. 在java中什么是模板2. 模板方法设计解决了什么问题?3. 代码化理解 1. 在java中什么是模板 抽象类体现的就是一种模板模式的设计,抽象类作为多个子类的通用模板,子类在抽象类的基础上进行扩展、改造,但子类总体上会保留…...

【MyBatis Plus】初识 MyBatis Plus,在 Spring Boot 项目中集成 MyBatis Plus,理解常用注解以及常见配置
文章目录 一、初识 MyBatis Plus1.1 MyBatis Plus 是什么1.2 MyBatis Plus 和 MyBatis 的区别 二、在 Spring Boot 项目中集成 MyBatis Plus2.1 环境准备2.2 引入 MyBatis Plus 依赖2.3 定义 Mapper2.4 测试 MyBatis Plus 的使用 三、MyBatis Plus 常用注解3.1 为什么需要注解3…...

Centos7 安装和配置 Redis 5 教程
在Centos上安装Redis 5,如果是 Centos8,那么 yum 仓库中默认的 redis 版本就是 5,直接 yum install 即可。但如果是 Centos7,yum 仓库中默认的 redis 版本是 3 系列,比较老: 通过 yum list | grep redis 命…...
使用 RAG、Langchain 和 Streamlit 制作用于文档问答的 AI 聊天机器人
在这篇文章中,我们将探索创建一个简单但有效的聊天机器人,该机器人根据上传的 PDF 或文本文件的内容响应查询。该聊天机器人使用 Langchain、FAISS 和 OpenAI 的 GPT-4 构建,将为文档查询提供友好的界面,同时保持对话上下文完整。…...

论文阅读——RoBERTa
一、LM效果好但是各种方法之间细致比较有挑战性,因为训练耗费资源多、并且在私有的不同大小的数据集上训练,不同超参数选择对结果影响很大。使用复制研究的方法对BERT预训练的超参数和数据集的影响细致研究,发现BERT训练不够,提出…...
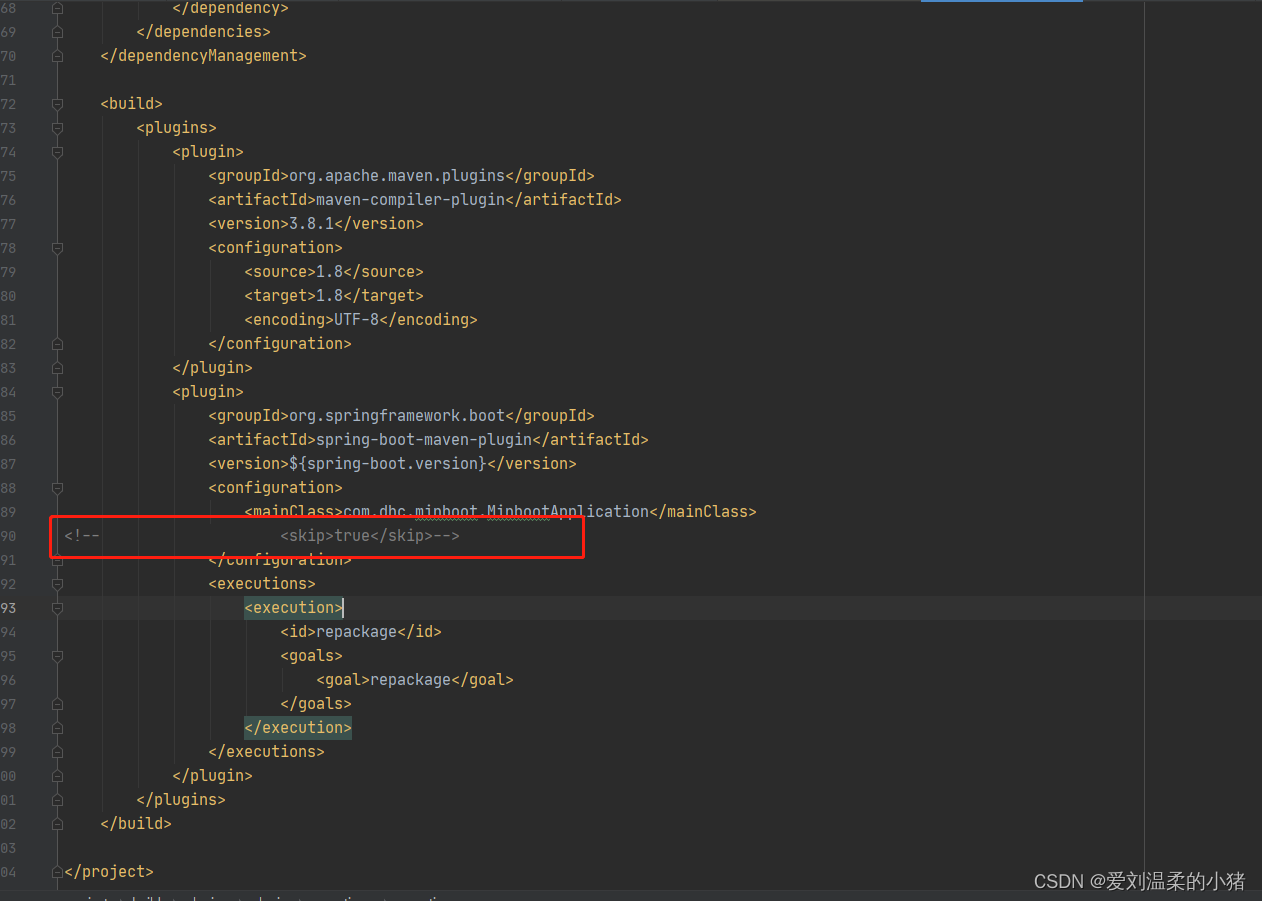
springboot项目打jar包,运行时提示jar中没有主清单属性
可能性一: 没有在pom中加入maven插件 在pom中加入下方代码即可。 <build><plugins><plugin><groupId>org.apache.maven.plugins</groupId><artifactId>maven-compiler-plugin</artifactId><version>3.8.1</ve…...

【Codeforces】 CF79D Password
题目链接 CF方向 Luogu方向 题目解法 看到区间异或,一个经典的套路是做差分,我们即在 l l l 处异或一次,在 r 1 r1 r1 处异或一次,然后前缀和起来 于是我们可以将问题转化成:有一个序列初始全 0 0 0,…...

叛乱沙漠风暴server安装 ubuntu 22.04
最新版沙暴已经不支持centos了,还是使用ubuntu比较顺利 官方文档: https://sandstorm-support.newworldinteractive.com/hc/en-us/articles/360049211072-Server-Admin-Guide // 安装steamcmd依赖 sudo add-apt-repository multiverse sudo apt inst…...

ES6中的新增属性——解构赋值
首先我们要创建一个假数据,我们现在要取出user中的id和名称,如下: let user JSON.parse(sessionStorage.getItem(userInfo)) let id user.id; let name user.name; 非常的麻烦,我们需要一项一项的获取,这个时候可…...

行业追踪,2023-10-27
自动复盘 2023-10-27 凡所有相,皆是虚妄。若见诸相非相,即见如来。 k 线图是最好的老师,每天持续发布板块的rps排名,追踪板块,板块来开仓,板块去清仓,丢弃自以为是的想法,板块去留让…...
Qt QWebEngine 更换语言
背景 使用Qt QWebEngine开发的应用,在一些场景下,会显示英文文本,比如右键、JS弹出的对话框,所以需要进行汉化,更改语言。 准备翻译文件 Qt有提供翻译好的ts文件,我们可以直接下载ts文件qtwebengine_zh_…...

Docker一键开启、停止和删除所有容器
开启所有运行的容器: docker start $(docker ps -aq) 这里,docker ps -aq 列出了所有容器的ID,然后 docker start 命令用于开启这些容器。 停止所有运行的容器: docker stop $(docker ps -aq) 同理,docker ps -aq…...
2016年亚太杯APMCM数学建模大赛B题化学元素对变形钢筋性能的影响求解全过程文档及程序
2016年亚太杯APMCM数学建模大赛 B题 化学元素对变形钢筋性能的影响 原题再现 热轧带肋钢筋通常被称为变形钢筋,它主要用于钢筋混凝土构件的骨架,在使用中需要一定的机械强度、弯曲和变形性能、制造焊接性。钢中的化学成分是影响热轧钢最终组织性能的基…...

美颜SDK集成指南:为应用添加视频美颜功能
随着社交媒体和直播应用的兴起,视频美颜功能已成为用户追求的一项热门特性。用户希望能够在拍摄照片或进行实时视频直播时,使用美颜功能来增强其外观。为了满足这一需求,开发者可以考虑集成美颜SDK,为其应用增加这一吸引人的功能。…...

AquilaChat2-34B 主观评测接近GPT3.5水平,最新版本Base和Chat权重已开源!
两周前,智源研究院发布了最强开源中英双语大模型AquilaChat2-34B 并在 22项评测基准中综合能力领先,广受好评。为了方便开发者在低资源上运行 34B 模型,智源团队发布了 Int4量化版本,AquilaChat2-34B 模型用7B量级模型相近的GPU资…...

useGeneratedKeys=“true“ keyProperty=“id“
1、xml中 useGeneratedKeys"true" keyProperty"id"2、db id bigint(20) AUTO_INCREMENT 3、场景 一般用于 先将DO写入dbinsert成功后,再将JDBC自增主键值AUTO_INCREMENT,回写到DO的id属性字段后续可能会从DO中获取此id值进行查询…...
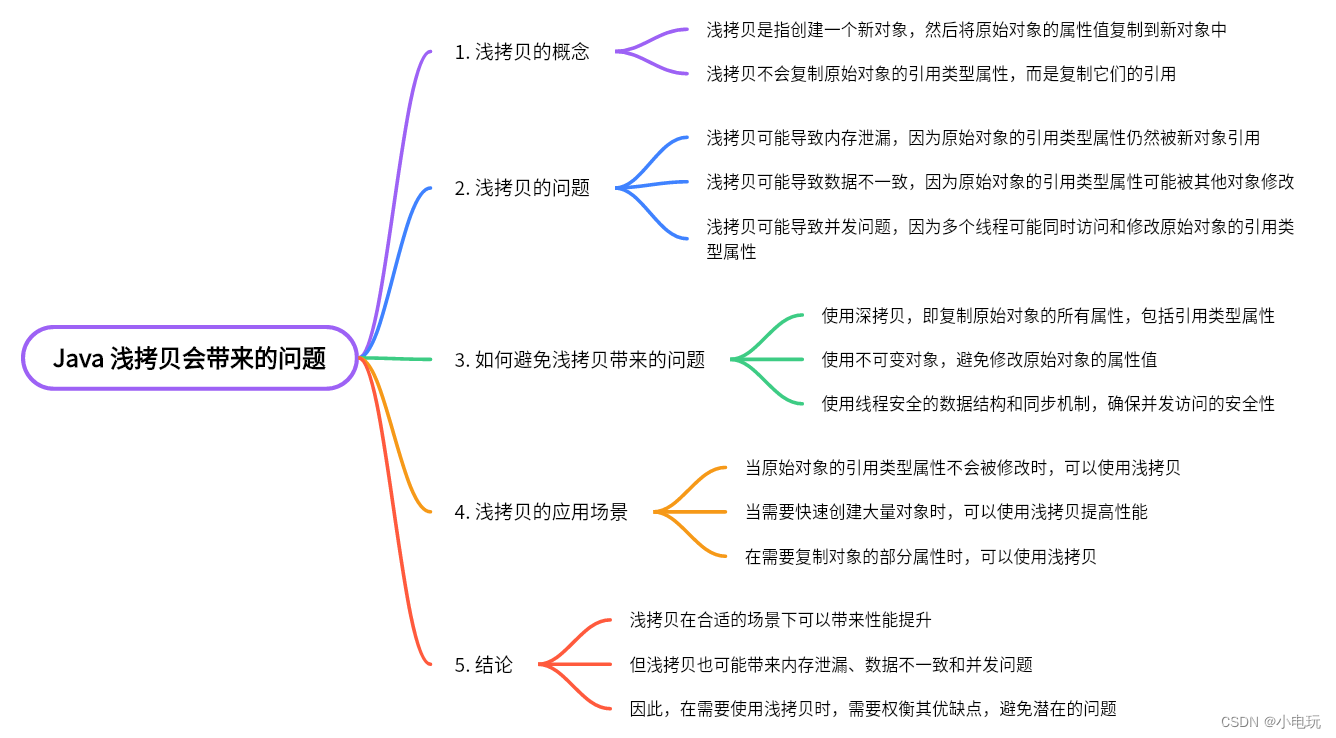
Java 浅拷贝会带来的问题
Java 浅拷贝会带来的问题 一,常见问题 Java 中的浅拷贝是指在对象拷贝时,只复制对象的引用,而不是对象本身。这意味着浅拷贝会导致多个对象共享同一块内存空间,当一个对象修改共享内存时,其他对象也会受到影响。 下…...

Monocle 3 | 太牛了!单细胞必学R包!~(二)(寻找marker及注释细胞)
1写在前面 昨天又是不睡觉的一天,晚上还被家属讲了一通,理由是我去急诊了,没有在办公室待着,他老公疼没人去看。🫠 我的解释是只有我一个值班医生,不可能那么及时,而且也不是什么急症啊。&#…...

范畴论视角下的概率机器学习:从Giry单子到贝叶斯推理的统一框架
1. 项目概述:当范畴论遇见概率机器学习如果你在机器学习领域摸爬滚打了一段时间,尤其是深度涉足过贝叶斯方法或概率图模型,你可能会对“不确定性”的数学表达感到既熟悉又头疼。我们习惯了用概率分布来描述数据噪声、参数先验和预测置信度&am…...

Debian挂载NFS远程硬盘踩坑实录:权限拒绝、连接超时问题一站式解决
Debian挂载NFS远程硬盘踩坑实录:权限拒绝、连接超时问题一站式解决在Linux环境下使用NFS(Network File System)挂载远程存储是常见的跨服务器文件共享方案,但实际操作中常会遇到各种"拦路虎"。本文将以Debian系统为例&a…...

在VirtualBox里跑Win10,远程桌面连不上?试试这个被忽略的虚拟机专用配置
VirtualBox虚拟机Win10远程桌面黑屏?这个隐藏配置项可能是关键在混合开发环境中,许多技术从业者习惯使用VirtualBox等虚拟化工具搭建多操作系统平台。一个常见场景是在Windows 7宿主机上运行Windows 10虚拟机,通过远程桌面进行跨系统操作。但…...

ARTX实时操作系统任务监控与调试实践
1. 实时任务监控需求解析在嵌入式实时操作系统(RTOS)开发中,任务调度监控是调试复杂系统的关键手段。ARTX-166作为一款面向C166架构的高级实时操作系统,其任务调度机制直接影响系统实时性能。当系统出现响应延迟或死锁时ÿ…...

Godot PCK文件解包:原理、工具与工程化实践指南
1. 为什么“解包PCK”不是技术炫技,而是实际工作刚需在Godot引擎生态里,“PCK文件”这三个字母背后藏着的不是冷冰板的二进制容器,而是一整套游戏交付逻辑的终点与逆向理解的起点。我第一次真正意识到这点,是在接手一个外包美术团…...

Claude API文档不是说明书,而是契约:用Swagger UI+Postman Collection+TypeScript SDK三件套构建零歧义协作协议
更多请点击: https://kaifayun.com 第一章:Claude API文档不是说明书,而是契约 Claude API 文档的本质并非操作指南或功能速查手册,而是一份具有技术约束力的**双向契约**——它明确定义了客户端与 Anthropic 服务之间在请求结构…...

Go语言CI/CD流水线实践
Go语言CI/CD流水线实践 引言 CI/CD(持续集成/持续部署)是现代软件开发的核心实践。本文将深入探讨如何为Go语言项目构建高效的CI/CD流水线。 一、CI/CD概述 1.1 CI/CD流程 代码提交 -> 代码审查 -> 构建 -> 测试 -> 部署 -> 监控1.2 关键…...

3分钟解决网易云音乐格式限制:免费NCM转换工具完全指南
3分钟解决网易云音乐格式限制:免费NCM转换工具完全指南 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 你是否曾因网易云音乐下载的NCM格式文件无法在车载音响或普通播放器中播放而烦恼?今天,我将…...

认知殖民与范式陷阱:当代人工智能发展路径的文明危机研究
认知殖民与范式陷阱:当代人工智能发展路径的文明危机研究摘要本文从文明安全与认知主权视角出发,系统批判了当前以Transformer架构、Scaling Law和大语言模型为核心的人工智能技术范式。研究指出,该范式不仅是技术路径的选择,更是…...

企业里大量重复性工作正在拖垮效率,你是否也深陷其中?2026年企业级Agent全场景落地指南
进入2026年,企业数字化转型已从“工具竞赛”转向“效能质变”。 尽管各种SaaS、ERP系统早已普及,但一个诡异的悖论依然存在: 系统越多,跨系统的搬运工作反而越多。 大量员工仍深陷在数据录入、报表核对、系统比对等机械性重复劳动…...