单目深度估计之图像重构原理解析
一、参考资料
浅析自监督深度估计中的光度损失(Photometric Loss)
二、图像重构原理
设输入位姿估计网络的3帧连续单目序列为 < I t − 1 , I t , I t + 1 > <I_{t-1},I_{t},I_{t+1}> <It−1,It,It+1>,其中 t t t 为时间索引, t > 0 t>0 t>0 。 I t I_{t} It 是目标帧,而其余2帧是源视图 I s = < I t − 1 , I t + 1 > I_{s}=<I_{t-1},I_{t+1}> Is=<It−1,It+1>。假设 p t p_{t} pt 为目标图像 I t I_{t} It 上某像素的齐次坐标, p t = [ u t ν t 1 ] T p_t=[u_t\quad\nu_t\quad1]^T pt=[utνt1]T。结合深度图像 D t {D}_t Dt 和相机位姿变换矩阵 T t → s T_{t\to s} Tt→s,可以将该像素还原为三维空间点,同时计算出在源图像时刻的相机坐标系下,该空间点的齐次坐标 p s c p_{sc} psc:
p s c = [ x s c y s c z s c 1 ] = T t → s D t ( p t ) K − 1 p t p_{sc}=\begin{bmatrix}x_{sc}\\y_{sc}\\z_{sc}\\1\end{bmatrix}=T_{t\to s}D_t(p_t)K^{-1}p_t psc= xscysczsc1 =Tt→sDt(pt)K−1pt
然后将该点投影回二维平面,得到该像素在源图像 I s I_s Is 上的齐次坐标 p s p_s ps:
p s = [ u s v s 1 ] = 1 z s c K p s c p_s=\begin{bmatrix}u_s\\v_s\\1\end{bmatrix}=\frac{1}{z_{sc}}Kp_{sc} ps= usvs1 =zsc1Kpsc
根据上述两个公式,可以建立 I t I_t It 的像素 p t p_t pt 与 I s I_s Is 的像素 p s p_s ps 的转换关系:
p s ∼ K T t → s D t ( p t ) K − 1 p t p_{s}\sim KT_{t\to s}D_{t}\left(p_{t}\right.)K^{-1}p_{t} ps∼KTt→sDt(pt)K−1pt
p t p_{t} pt 和 p s p_s ps 间的差异来源于相机自身的运动,因此可得刚体运动光流 F t → s r F_{t\rightarrow s}^r Ft→sr:
F t → s r ( p t ) = [ Δ u Δ v ] = [ u s − u t v s − v t ] F_{t\to s}^r(p_t)=\begin{bmatrix}\Delta u\\\Delta v\end{bmatrix}=\begin{bmatrix}u_s-u_t\\v_s-v_t\end{bmatrix} Ft→sr(pt)=[ΔuΔv]=[us−utvs−vt]
继而可以基于此光流和源图像 I s I_s Is ,重构目标图像 I ^ t \hat{I}_t I^t, I ^ t \hat{I}_t I^t 的像素值均可以从 I s I_s Is 中近似:
I ^ t ( p t ) = I s ( p s ) = I s ( p t + F t → s r ( p t ) ) \hat{I}_t(p_t)=I_s(p_s)=I_s(p_t+F_{t\to s}^r(p_t)) I^t(pt)=Is(ps)=Is(pt+Ft→sr(pt))
重构图像的过程中,坐标 p s p_s ps 极有可能是所示的浮点数,此时 I s ( p s ) I_s(p_s) Is(ps) 需要由最邻近的四个像素近的四个像素 I s ( p s l t ) 、 I s ( p s r t ) 、 I s ( p s l b ) 和 I s ( p s r b ) I_{s}(p_{s}^{lt})、I_{s}(p_{s}^{rt})、I_{s}(p_{s}^{lb})\text{和}I_{s}(p_{s}^{rb}) Is(pslt)、Is(psrt)、Is(pslb)和Is(psrb) 双线性插值[2]求得。

三、自监督单目深度估计原理
zhou等人[1]提出利用视图合成作为监督信号,通过当前时刻捕获的视图(目标帧),并利用深度、位姿信息作为中间量对图像进行重建,通过网络的不断迭代,最终得到准确的深度和位姿信息。视图合成的原理是通过几何映射,把当前时刻捕获的图像映射到另一相邻时刻的图像对其进行重建。该方法的思路来自于视觉里程计中的直接法。
既然是自监督,那么就意味着输入的图像是没有深度标签的,所以我们就无法利用ground truth这个"标准答案”对输出的深度图进行优化。于是,我们利用联合训练的方法,通过输入相邻帧图像,对相对位姿网络进行训练,从而经过投影变换得到重建帧,以目标帧与重建帧的差值作为训练信号,达到自监督的效果。
几乎所有的自监督任务是利用深度估计和相机姿态估计两个模块联合进行的,如下图所示:

自监督深度估计的具体流程如下:
- 将目标帧 I t I_t It 输入深度预测网络 Φ d \Phi_{d} Φd,得到深度图 D t {D}_t Dt;
- 将目标帧 I t I_t It 和源帧 I s I_s Is 同时输入相对位姿估计网络 Φ d \Phi_{d} Φd,得到相对位姿矩阵 T t → s T_{t\to s} Tt→s;
- 利用 p s ∼ K T t → s D t ( p t ) K − 1 p t p_{s}\sim KT_{t\to s}D_{t}\left(p_{t}\right.)K^{-1}p_{t} ps∼KTt→sDt(pt)K−1pt 这样的转换关系,由 p t p_t pt 计算出 p s p_s ps;
- 由于 p s p_s ps 不一定为整数,故利用双线性插值算法计算该点的像素值,然后将该点采样到 I ^ t \hat{I}_t I^t 图像上的对应位置,通过借助投影下采样填充,最终实现利用 I s I_s Is 的像素信息重构出来 I ^ t \hat{I}_t I^t ;
- 利用 I t I_t It 和 I ^ t \hat{I}_t I^t 计算图像重构损失。
四、图像重构损失(reprojection loss)
将 L 1 L_1 L1 和 S S I M SSIM SSIM 两者组合作为图像重构损失来计算目标帧 I t I_t It 和重构帧 I ^ t \hat{I}_t I^t 之间的差异,即:
L p ( I t , I ^ t ) = α ( 1 − S S I M ( I t , I ^ t ) ) 2 + ( 1 − α ) ∣ I t − , I ^ t ∣ 1 \mathcal{L}_p(I_t,\hat{I}_t)=\alpha\frac{(1-\mathrm{SSIM}(\mathrm{I}_t,\hat{\mathrm{I}}_t))}2+(1-\alpha)|I_t-,\hat{I}_t|_1 Lp(It,I^t)=α2(1−SSIM(It,I^t))+(1−α)∣It−,I^t∣1
此函数由两部分相加而成,前面用于计算结构相似度 S S I M SSIM SSIM ,后面用于计算光度损失(photometric loss)。很多论文直接把整个函数叫光度损失(Photometric Loss),严格意义上不那么准确,应该称作图像重构损失(reprojection loss)
五、参考文献
[1]Zhou T, Brown M, Snavely N, et al. Unsupervised learning of depth and ego-motion from video[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2017: 1851-1858.
[2]Godard C, Mac Aodha O, Brostow G J. Unsupervised monocular depth estimation with left-right consistency[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2017: 270-279.
相关文章:
单目深度估计之图像重构原理解析
一、参考资料 浅析自监督深度估计中的光度损失(Photometric Loss) 二、图像重构原理 设输入位姿估计网络的3帧连续单目序列为 < I t − 1 , I t , I t 1 > <I_{t-1},I_{t},I_{t1}> <It−1,It,It1>,其中 t t t 为时间索引,…...
【爬虫】charles手机抓包环境设置(设置系统证书)
1.说明 想要对手机抓包,最关键的是需要设置好根证书,用户证书在安卓7.0之后就不受信任了,想要对手机app抓包,就需要把用户证书设置为系统证书(根证书) 注意,想要设置为根证书,你的…...

【flink sql table api】时间属性的指定与使用注意事项
文章目录 一. 时间属性介绍二. Table api指定时间属性三. 处理时间的指定1. 在创建表的 DDL 中定义2. 在 DataStream 到 Table 转换时定义3. 使用 TableSource 定义 四. 事件时间的指定1. 在 DDL 中定义2. 在 DataStream 到 Table 转换时定义3. 使用 TableSource 定义 五. 小结…...
评价模型:CRITIC客观赋权法
目录 1.算法原理介绍2.算法步骤2.1 数据标准化2.2 计算信息承载量2.3 计算权重和得分 3.案例分析 1.算法原理介绍 CRITIC方法是一种客观权重赋权法,其基本思路是确定指标的客观权数以两个基本概念为基础。一是对比强度,它表示同一指标各个评价方案取值差…...

两个Tomcat插件配置不同端口,session冲突,同时登录被挤下线问题的解决
如果是配置了两个Tomcat的插件,在同一ip有两个需要同时登录的项目,可以在其中一个web项目的web.xml文件里添加session命名的配置,如下: <!--配置不同的session,避免管理端和手机端两个同时登录被挤下线--><se…...

Mybatis中执行Sql的执行过程
MyBatis中执行SQL的过程可以分为以下几个步骤: 解析配置文件:在运行时,MyBatis会加载并解析配置文件(通常为mybatis-config.xml),获取数据库连接信息、映射文件等。 创建SqlSessionFactory:MyB…...

IEEE Standard for SystemVerilog—Chapter 25.7 Tasks and functions in interfaces
子例程(任务和函数)可以在接口中定义,也可以在连接的一个或多个模块中定义。这允许更抽象的建模级别。例如,“读”和“写”可以定义为任务,而不需要引用任何连线,主模块只能调用这些任务。在modport中&…...

一台服务器最大能支持多少条 TCP 连接
文章目录 1. 一台服务器最大能打开的文件数1.1 限制参数1.2 调整服务器能打开的最大文件数示例 2. 一台服务器最大能支持多少连接3. 一台客户端机器最多能发起多少条连接4. 其他5. 相关实际问题5.1 "too many open files" 报错是怎么回事,该如何解决5.2 一…...

Qt重定向QDebug,Qt/C++开源作品39-日志输出增强版V2022
Qt重定向QDebug,自定义一个简易的日志管理类 Chapter1 Qt重定向QDebug,自定义一个简易的日志管理类0.前言1.最简单的操作运行结果2.实现一个简易的日志管理类 Chapter2 Qt::Qt Log日志模块Qt Log日志模块官方解释官方Demo思路 Chapter3 QT日志模块的个性…...

linux入门---多线程的控制
目录标题 线程库pthread_create如何一次性创建多个线程线程的终止线程的等待线程取消分离线程如何看待其他语言支持的多线程线程id的本质线程的局部存储线程的封装 线程库 要想控制线程就得使用原生线程库也可以将其称为pthread库,这个库是遵守posix标准的…...
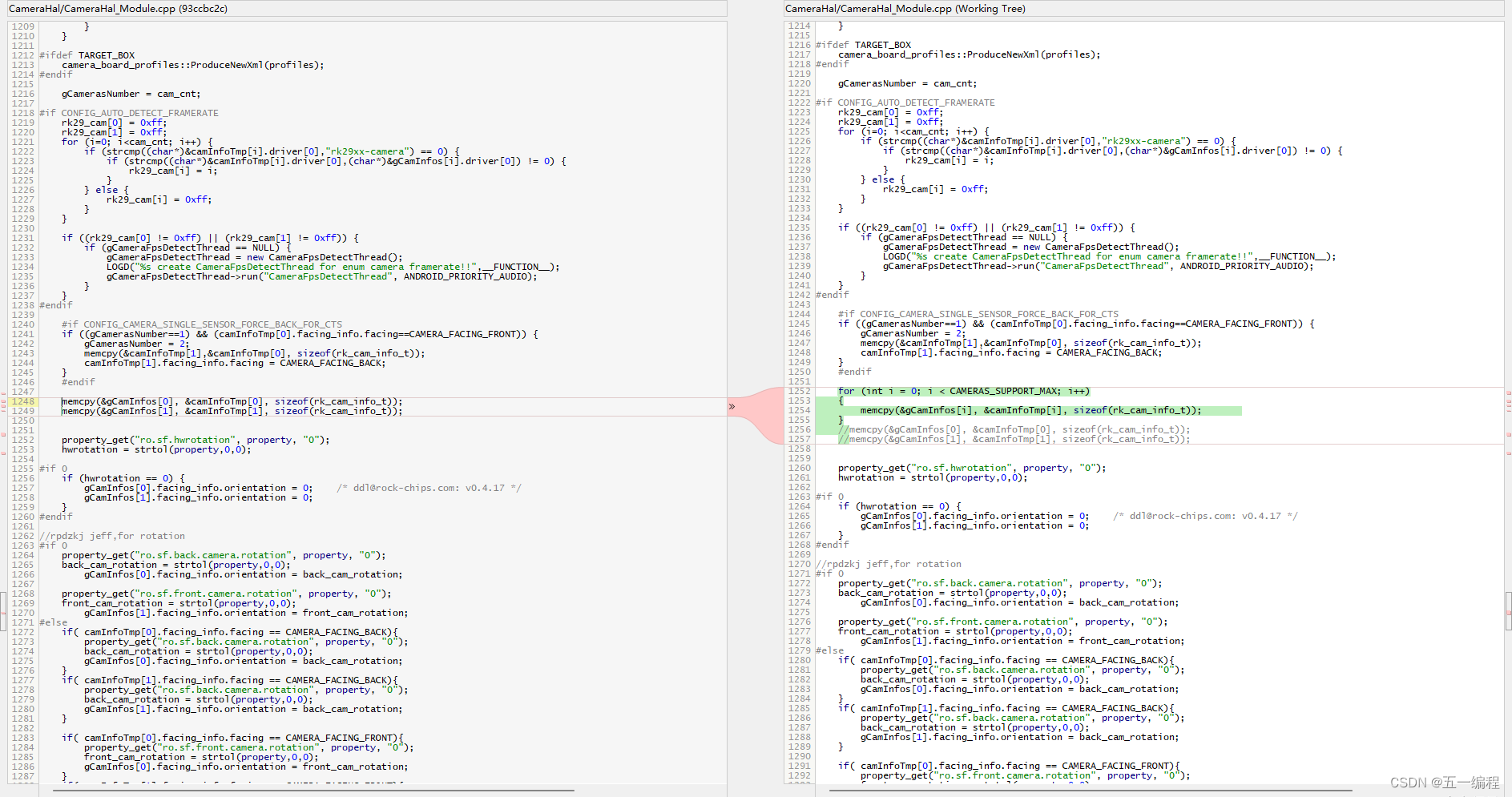
基于android的 rk3399 同时支持多个USB摄像头
基于android的 rk3399 同时支持多个USB摄像头 一、前文二、CameraHal_Module.h三、CameraHal_Module.cpp四、编译&烧录Image五、App验证 一、前文 Android系统默认支持2个摄像头,一个前置摄像头,一个后置摄像头 需要支持数量更多的摄像头࿰…...
【Qt之控件QTreeView】设置单元格高度、设置图标尺寸
设置列宽 设置高度 自定义代理 继承QItemDelegate,实现sizeHint ()方法,设置自定义委托。 class itemDelegate : public QItemDelegate {Q_OBJECTpublic:explicit itemDelegate(QObject *parent 0) : QItemDelegate(parent){}~itemDelegate(){}virtua…...
)
力扣42.接雨水(java,暴力法、前缀和解法)
Problem: 42. 接雨水 文章目录 思路解题方法复杂度Code 思路 要能接住雨水,感性的认知就是要形成一个“下凹区域”,则此时我们就要比较当前柱子和其左右柱子高度的关系,易得一个关键的式子:当前小区域的积水 min(当前…...
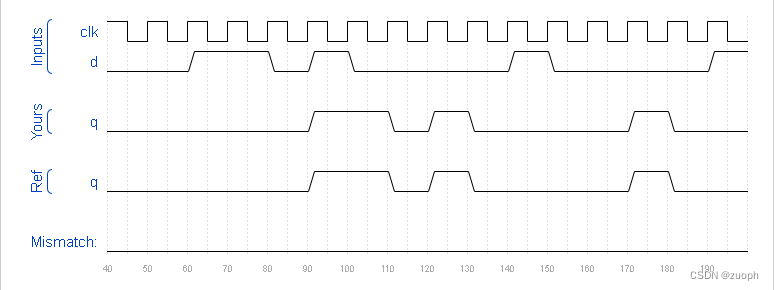
hdlbits系列verilog解答(移位寄存器)-23
文章目录 一、问题描述二、verilog源码三、仿真结果 一、问题描述 您将获得一个具有两个输入和一个输出的模块 my_dff (实现 D 触发器)。实例化其中的三个,然后将它们链接在一起以形成长度为 3 的移位寄存器。端口 clk 需要连接到所有实例。…...

Linux命令记载
服务器基本操作 SSH登录服务器 ssh -p 端口号 用户名服务器IP 输入密码SFTP上传文件 #输入密码 #使用get命令下载远程服务器的文件,比如/usr/test.txt sftp>get /usr/test.txt#使用put命令上传本地文件到服务器,比如/usr/test1.txt sftp> put /…...
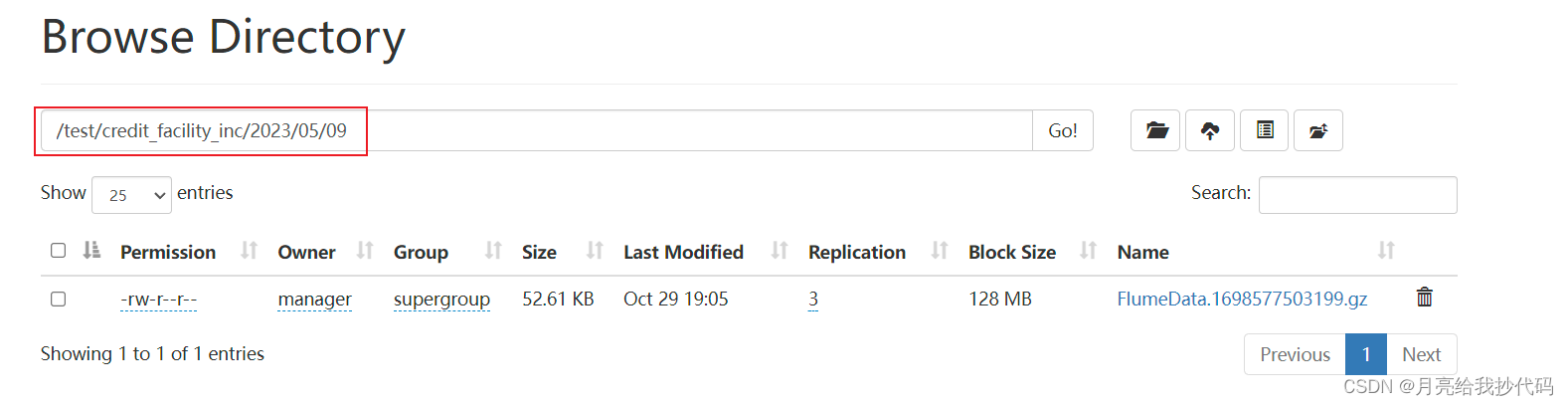
Flume 快速入门【概述、安装、拦截器】
文章目录 什么是 Flume?Flume 组成Flume 安装Flume 配置任务文件应用示例启动 Flume 采集任务 Flume 拦截器编写 Flume 拦截器拦截器应用 什么是 Flume? Flume 是一个开源的数据采集工具,最初由 Apache 软件基金会开发和维护。它的主要目的是…...
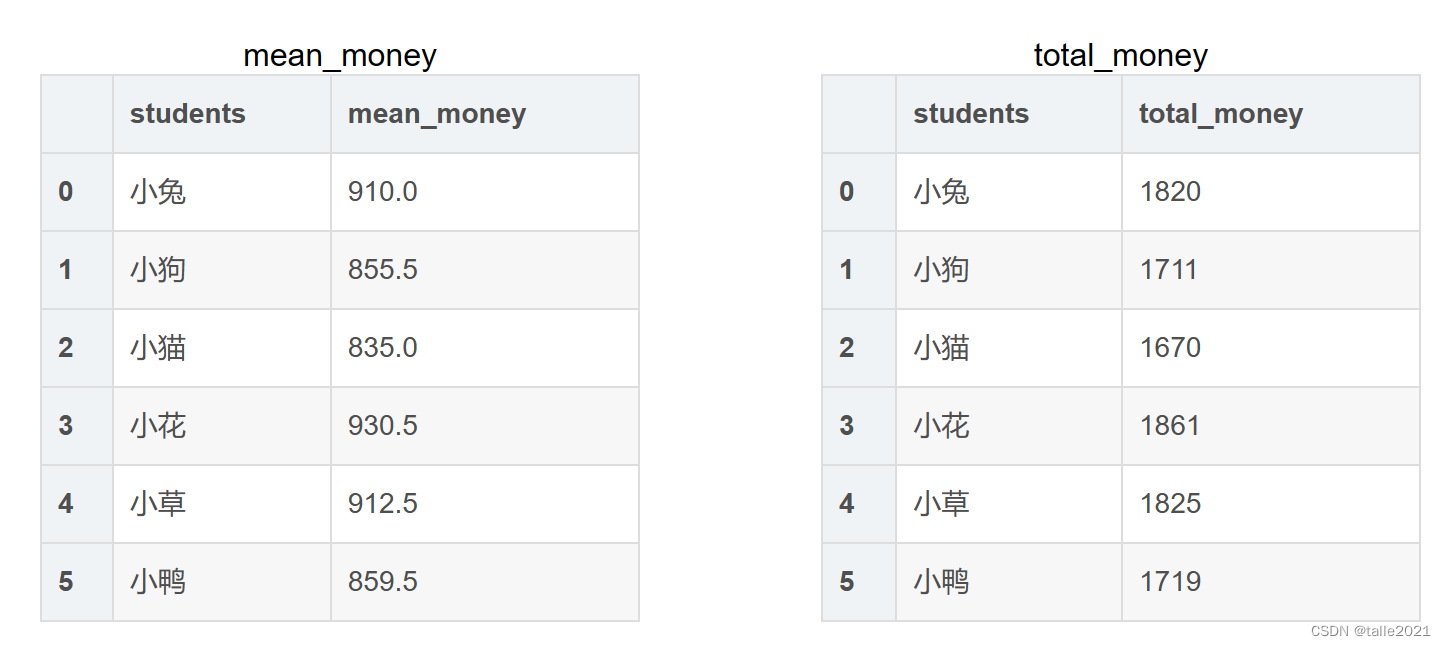
【pandas技巧】group by+agg+transform函数
目录 1. group by单个字段单个聚合 2. group by单个字段多个聚合 3. group by多个字段单个聚合 4. group by多个字段多个聚合 5. transform函数 studentsgradesexscoremoney0小狗小学部female958441小猫小学部male938362小鸭初中部male838543小兔小学部female909314小花小…...
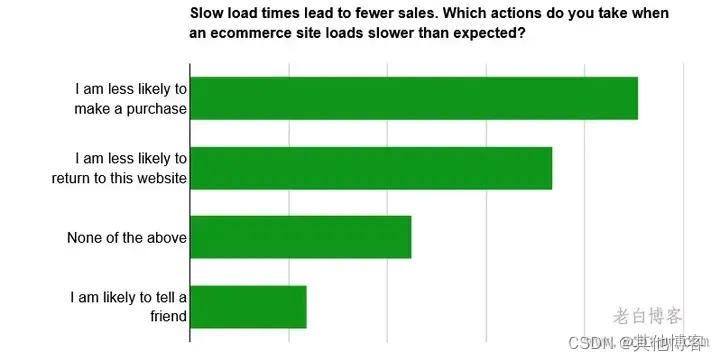
一文解读WordPress网站的各类缓存-老白博客
缓存是一种重要的WordPress优化手段,用于提高网站的性能和加载速度。减少计算量,有效提升响应速度,让有限的资源服务更多的用户。本文老白博客便从自己的使用简单给大家介绍下WordPress的缓存,包括 站点缓存(Page Cach…...

从零开始:开发直播商城APP的技术指南
时下,直播商城APP已经成了线上购物、电子商务的核心组成,本文将为您提供一个全面的技术指南,帮助您从零开始开发一个直播商城APP。我们将涵盖所有关键方面,包括技术堆栈、功能模块、用户体验和安全性。 第一部分:技术…...
GZ035 5G组网与运维赛题第6套
2023年全国职业院校技能大赛 GZ035 5G组网与运维赛项(高职组) 赛题第6套 一、竞赛须知 1.竞赛内容分布 竞赛模块1--5G公共网络规划部署与开通(35分) 子任务1:5G公共网络部署与调试(15分) …...

3步掌握抖音批量下载:终极免费无水印下载器完整指南
3步掌握抖音批量下载:终极免费无水印下载器完整指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support…...

基于微信小程序的疫苗预约管理系统的设计与实现
第1章 绪 论本章对疫苗预约管理系统的背景进行了研究和分析,并且对目前疫苗预约管理系统所存在的问题做了简单的分析,接着论述了选题的重要性以及现实意义,通过研究疫苗预约管理系统类系统的发展历程,给后面系统需求分析和设计打下…...

RAG三大冲突与三大死穴及解决方案
RAG :向量召回 稀疏匹配 重排序融合 动态裁剪 —— 冲突根源与工程解法 面向开发者的深度技术解析:揭开 RAG 检索 pipeline 中三个环节的底层冲突,以及幻觉漂移、上下文溢出、检索冗余三大企业级死穴的根治方案。 GitHub 项目地址…...

智慧防疫终端实战:从数字哨兵系统设计到落地运维全解析
1. 项目背景与核心痛点:为什么“数字哨兵”成了刚需?去年下半年,我参与了一个在无锡落地的智慧防疫项目,核心就是部署一批“数字哨兵”智能核验终端。去现场之前,我和很多人想的一样:不就是个扫健康码的机器…...
告别CNN局部视野:用UNETR的Transformer编码器搞定三维医学图像分割(附PyTorch+MONAI实战)
突破CNN局限:UNETR在三维医学图像分割中的Transformer实践指南 医学图像分割一直是计算机辅助诊断系统中的核心环节,从肿瘤定位到器官轮廓勾画,精准的分割结果直接影响后续分析的可靠性。传统基于CNN的方法虽然在2D图像处理中表现出色&#x…...

Sixpack Redis数据存储策略:高效管理A/B测试数据的10个技巧
Sixpack Redis数据存储策略:高效管理A/B测试数据的10个技巧 【免费下载链接】sixpack Sixpack is a language-agnostic a/b-testing framework 项目地址: https://gitcode.com/gh_mirrors/si/sixpack Sixpack是一个语言无关的A/B测试框架,它通过R…...

CANN/asc-devkit同步通知API文档
asc_sync_notify 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 项目地址: https://gitcod…...

对比直接使用厂商API体验Taotoken在多模型选型上的便利
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接使用厂商API体验Taotoken在多模型选型上的便利 在开发基于大语言模型的应用时,一个常见的需求是尝试不同的模型…...

【笔记】HarmonyOS核心设计理念
HarmonyOS初衷不是为了平替,是看到了万物智联时代,对智能终端操作系统有许多新的诉求; 本内容主要帮助理解HarmonyOS核心设计理念的关键背景与创新驱动力; 第一节:回顾操作系统的发展历史 第一台通用计算机诞生于1946年…...
:Handle进阶——批量巡检、自动审计与高危操作SOP)
《Sysinternals实战指南》进程和诊断工具学习笔记(8.25):Handle进阶——批量巡检、自动审计与高危操作SOP
🔥个人主页:杨利杰YJlio❄️个人专栏:《Sysinternals实战教程》《Windows PowerShell 实战》《WINDOWS教程》《IOS教程》《微信助手》《锤子助手》 《Python》 《Kali Linux》 《那些年未解决的Windows疑难杂症》🌟 让复杂的事情更…...