opencv dnn模块 示例(20) 目标检测 object_detection 之 yolor
文章目录
- 1、论文介绍
- 1.1、YOLOR思想动机
- 1.2、隐式知识学习
- 1.2.1、隐式知识如何工作
- 1.2.2、隐式知识统一网络建模
- 1.3、实验
- 1.4、总结
- 2、测试
- 2.1、opencv dnn
- 2.1.1、代码
- 2.1.2、结果
- 2.2、测试效率
YOLOR出自论文You Only Learn One Representation: Unified Network for Multiple Tasks,受人类学习方式(使用五官,通过常规和潜意识学习,总结丰富的经验并编码存储,进而处理已知或未知的信息)的启发,论文提出了一个统一的网络来同时编码显式知识和隐式知识,在网络中执行了kernel space alignment(核空间对齐)、prediction refinement(预测细化)和 multi-task learning(多任务学习),同时对多个任务形成统一的表示。结果表明神经网络中引入隐式知识有助于所有任务的性能提升,进一步的分析发现隐式表示之所以能带来性能提升,是因为其具备了捕获不同任务的物理意义的能力。
1、论文介绍
paper: https://arxiv.org/abs/2105.04206
code: https://github.com/WongKinYiu/yolor
1.1、YOLOR思想动机

如图1所示,人可以从多个角度来分析同一个目标,然而通常训练CNN时只给予了一个角度,也就是说针对某一个任务得到的CNN特征很难适用于其他问题。作者认为造成上述问题的原因主要是模型只提取了神经元特征而丢弃了隐式知识的学习运用,然而就像人脑一样隐式知识对分析各种各样的任务是非常有用的。
人类对隐式知识的学习通常通过潜意识,然而并没有系统的定义怎样学习和获得隐式知识。对于神经网络而言,一般将浅层特征定义为显式知识,深层特征定义为隐式知识。本文将直接可观察的知识定义为显式知识,隐藏在神经网络中且无法观察的知识定义为隐式知识。
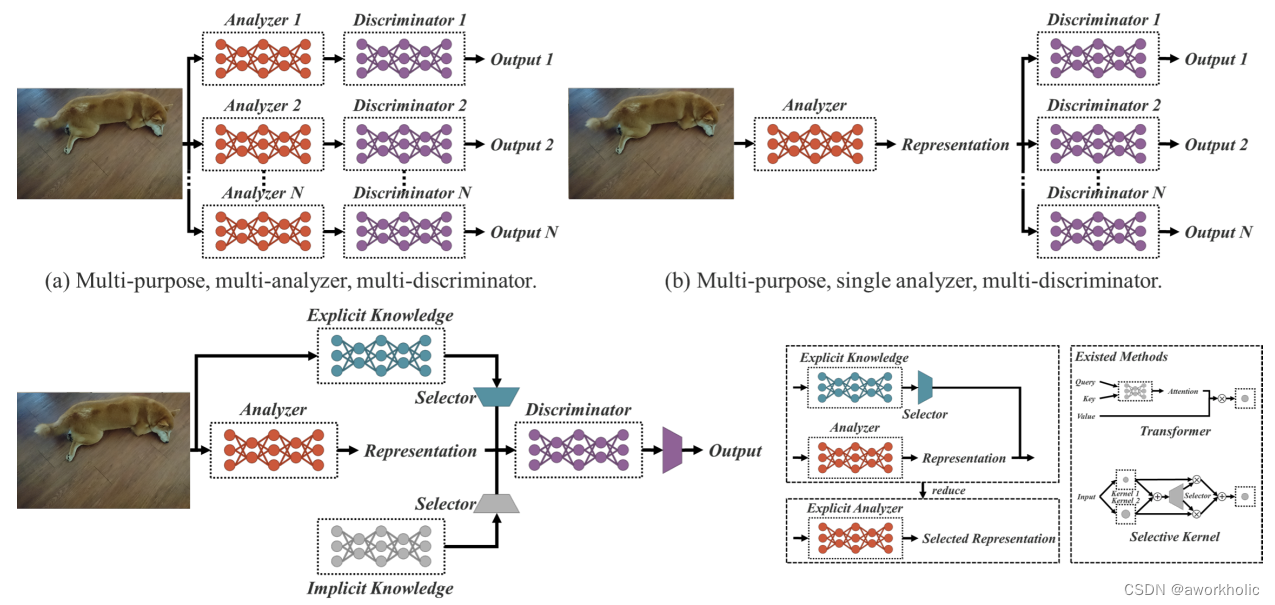
如图2所示,提出了一个统一的网络来集成显式知识和隐式知识,通过学习统一的表达,使得各个子表示能够适用于不同任务。基于前人工作的理论基础,本文结合压缩感知和深度学习来构建统一网络。
本文主要贡献如下:
-
提出了一个可同时完成多种任务的统一网络,它通过融合显式知识和隐式知识学习一个可以完成多个任务的统一表征,提出的网络可以有效的提升模型的表现,仅增加千分之一不到的计算成本;
-
通过 kernel space alignment(核空间对齐)、prediction refinement(预测细化)和 multi-task learning(多任务学习)来完成隐式知识的学习,并验证了其有效性;
-
分别讨论了隐式知识的建模方式,包括向量、神经网络、矩阵分解,并验证了这些方式的有效性;
-
证实了所提出的内隐表征学习方法能够准确地对应于特定的物理特征,并以视觉的方式进行了呈现;还证实了如果算子符合目标的物理意义,它可以用来整合隐式知识和显式知识,并会产生乘数效应;
-
与SOTA比较,YOLOR能够实现和目标检测Scaled-YOLOv4-P7一样的精度,但是推理速度快了88%。
1.2、隐式知识学习
1.2.1、隐式知识如何工作
流形空间约简
核空间对齐
更多功能和处理方式
1.2.2、隐式知识统一网络建模
隐式知识的表示
Unified Networks:
隐式知识的建模
向量/矩阵/张量
矩阵分解
训练
推理
1.3、实验
3.1 实验设置
3.2 FPN特征对齐
3.3 目标检测预测细化
3.4 多任务规范表征
3.5 隐式知识建模不同算子比较
3.6 隐式知识建模不同方式比较
3.7 隐式知识模型分析
3.8 隐式知识提升目标检测
1.4、总结
2、测试
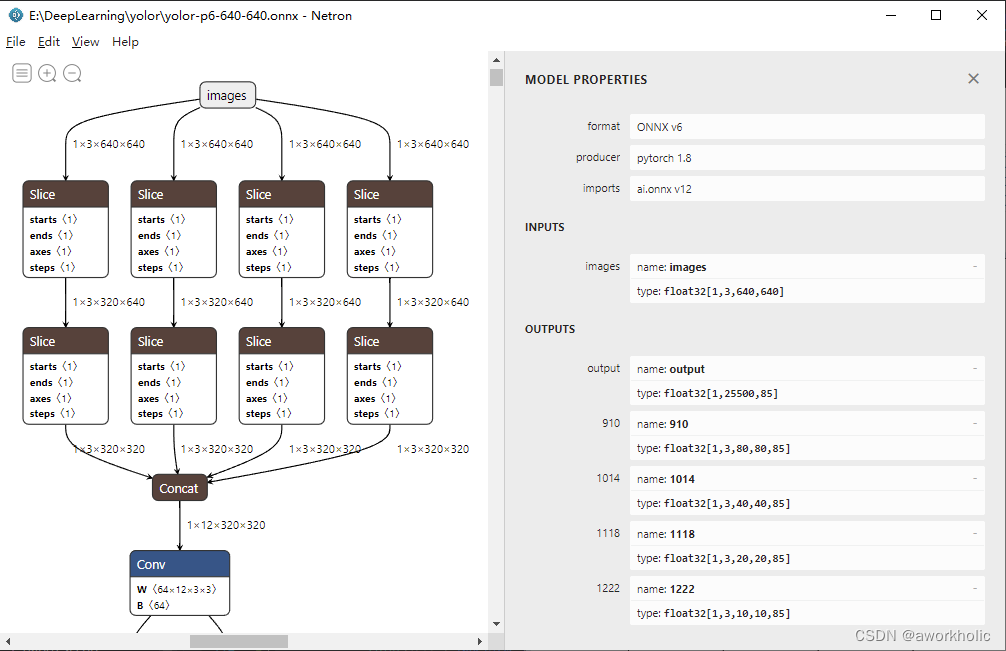
这里以 yolor-p6-640-640 进行测试。网络模型可以看到,输出一共有4个,实际是4个尺度上的结果,最终通过reshape和concat合并成一个输出(输出格式与yolov5一致)。
2.1、opencv dnn
2.1.1、代码
使用和yolov5相同的测试代码。
#pragma once#include "opencv2/opencv.hpp"#include <fstream>
#include <sstream>#include <random>using namespace cv;
using namespace dnn;float inpWidth;
float inpHeight;
float confThreshold, scoreThreshold, nmsThreshold;
std::vector<std::string> classes;
std::vector<cv::Scalar> colors;bool letterBoxForSquare = true;cv::Mat formatToSquare(const cv::Mat &source);void postprocess(Mat& frame, cv::Size inputSz, const std::vector<Mat>& out, Net& net);void drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat& frame);std::random_device rd;
std::mt19937 gen(rd());
std::uniform_int_distribution<int> dis(100, 255);int testYoloR()
{// 根据选择的检测模型文件进行配置 confThreshold = 0.25;scoreThreshold = 0.45;nmsThreshold = 0.5;float scale = 1 / 255.0; //0.00392Scalar mean = {0,0,0};bool swapRB = true;inpWidth = 640;inpHeight = 640;String modelPath = R"(E:\DeepLearning\yolor\yolor-p6-640-640.onnx)";String configPath;String framework = "";//int backendId = cv::dnn::DNN_BACKEND_OPENCV;//int targetId = cv::dnn::DNN_TARGET_CPU;int backendId = cv::dnn::DNN_BACKEND_CUDA;int targetId = cv::dnn::DNN_TARGET_CUDA; String classesFile = std::string(R"(\data\coco.names)");// Open file with classes names.if(!classesFile.empty()) {const std::string& file = classesFile;std::ifstream ifs(file.c_str());if(!ifs.is_open())CV_Error(Error::StsError, "File " + file + " not found");std::string line;while(std::getline(ifs, line)) {classes.push_back(line);colors.push_back(cv::Scalar(dis(gen), dis(gen), dis(gen)));}}// Load a model.Net net = readNet(modelPath, configPath, framework);net.setPreferableBackend(backendId);net.setPreferableTarget(targetId);//std::vector<String> outNames = net.getUnconnectedOutLayersNames();std::vector<String> outNames{"output"};{int dims[] = {1,3,inpHeight,inpWidth};cv::Mat tmp = cv::Mat::zeros(4, dims, CV_32F);std::vector<cv::Mat> outs;net.setInput(tmp);for(int i = 0; i<10; i++)net.forward(outs, outNames); // warmup}// Create a windowstatic const std::string kWinName = "Deep learning object detection in OpenCV";cv::namedWindow(kWinName, 0);// Open a video file or an image file or a camera stream.VideoCapture cap;cap.open(R"(E:\DeepLearning\yolov5\data\images\bus.jpg)");cv::TickMeter tk;// Process frames.Mat frame, blob;while(waitKey(1) < 0) {//tk.reset();//tk.start();cap >> frame;if(frame.empty()) {waitKey();break;}// Create a 4D blob from a frame.cv::Mat modelInput = frame;if(letterBoxForSquare && inpWidth == inpHeight)modelInput = formatToSquare(modelInput);blobFromImage(modelInput, blob, scale, cv::Size2f(inpWidth, inpHeight), mean, swapRB, false);// Run a model.net.setInput(blob);std::vector<Mat> outs;//tk.reset();//tk.start();auto tt1 = cv::getTickCount();net.forward(outs, outNames);auto tt2 = cv::getTickCount();tk.stop();postprocess(frame, modelInput.size(), outs, net);//tk.stop(); Put efficiency information.//std::vector<double> layersTimes;//double freq = getTickFrequency() / 1000;//double t = net.getPerfProfile(layersTimes) / freq;//std::string label = format("Inference time: %.2f ms (%.2f ms)", t, /*tk.getTimeMilli()*/ (tt2 - tt1) / cv::getTickFrequency() * 1000);std::string label = format("Inference time: %.2f ms", (tt2 - tt1) / cv::getTickFrequency() * 1000);cv::putText(frame, label, Point(0, 15), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 255, 0));cv::imshow(kWinName, frame);}return 0;
}cv::Mat formatToSquare(const cv::Mat &source)
{int col = source.cols;int row = source.rows;int _max = MAX(col, row);cv::Mat result = cv::Mat::zeros(_max, _max, CV_8UC3);source.copyTo(result(cv::Rect(0, 0, col, row)));return result;
}void postprocess(Mat& frame, cv::Size inputSz, const std::vector<Mat>& outs, Net& net)
{// yolov5 has an output of shape (batchSize, 25200, 85) (Num classes + box[x,y,w,h] + confidence[c])auto tt1 = cv::getTickCount();float x_factor = inputSz.width / inpWidth;float y_factor = inputSz.height / inpHeight;std::vector<int> class_ids;std::vector<float> confidences;std::vector<cv::Rect> boxes;int rows = outs[0].size[1];int dimensions = outs[0].size[2];float *data = (float *)outs[0].data;for(int i = 0; i < rows; ++i) {float confidence = data[4];if(confidence >= confThreshold) {float *classes_scores = data + 5;cv::Mat scores(1, classes.size(), CV_32FC1, classes_scores);cv::Point class_id;double max_class_score;minMaxLoc(scores, 0, &max_class_score, 0, &class_id);if(max_class_score > scoreThreshold) {confidences.push_back(confidence);class_ids.push_back(class_id.x);float x = data[0];float y = data[1];float w = data[2];float h = data[3];int left = int((x - 0.5 * w) * x_factor);int top = int((y - 0.5 * h) * y_factor);int width = int(w * x_factor);int height = int(h * y_factor);boxes.push_back(cv::Rect(left, top, width, height));}}data += dimensions;}std::vector<int> indices;NMSBoxes(boxes, confidences, scoreThreshold, nmsThreshold, indices);auto tt2 = cv::getTickCount();std::string label = format("NMS time: %.2f ms", (tt2 - tt1) / cv::getTickFrequency() * 1000);cv::putText(frame, label, Point(0, 30), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 255, 0));for(size_t i = 0; i < indices.size(); ++i) {int idx = indices[i];Rect box = boxes[idx];drawPred(class_ids[idx], confidences[idx], box.x, box.y,box.x + box.width, box.y + box.height, frame);}
}void drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat& frame)
{rectangle(frame, Point(left, top), Point(right, bottom), Scalar(0, 255, 0));std::string label = format("%.2f", conf);Scalar color = Scalar::all(255);if(!classes.empty()) {CV_Assert(classId < (int)classes.size());label = classes[classId] + ": " + label;color = colors[classId];}int baseLine;Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);top = max(top, labelSize.height);rectangle(frame, Point(left, top - labelSize.height),Point(left + labelSize.width, top + baseLine), color, FILLED);cv::putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.5, Scalar());
}
2.1.2、结果
测试如图,发现误识别了一个 traffic light。对比源py测试脚本,修改 bool letterBoxForSquare = false; 将等比缩放关闭后检测正常。

2.2、测试效率
RTX-1080ti,i7-7700k
opencv cpu:630ms
opencv gpu :52ms
opencv gpu (fp16):793ms
以下统计时间包含: 预处理+推理+后处理
openvino(cpu):274ms
onnxruntime(gpu):30ms
tensorrt:23ms
相关文章:
opencv dnn模块 示例(20) 目标检测 object_detection 之 yolor
文章目录 1、论文介绍1.1、YOLOR思想动机1.2、隐式知识学习1.2.1、隐式知识如何工作1.2.2、隐式知识统一网络建模 1.3、实验1.4、总结 2、测试2.1、opencv dnn2.1.1、代码2.1.2、结果 2.2、测试效率 YOLOR出自论文You Only Learn One Representation: Unified Network for Mult…...

【队列的顺序表示,链式表示】
文章目录 队列的表示和实现相关术语队列的表示链队的表示链队的定义链队的初始化销毁链队列 链队列的入队出栈 队列的表示和实现 相关术语 队列(Queue)是仅在表尾进行插入操作,在表头进行删除操作的线性表。表尾即an端,称为队尾…...

Pydantic 实践
1. 简介 pydantic 库是一种常用的用于数据接口 schema 定义与检查的库。 通过 pydantic 库,我们可以更为规范地定义和使用数据接口,这对于大型项目的开发将会更为友好。 当然,除了 pydantic 库之外,像是 valideer 库、marshmallo…...

获取pandas中的众数
pandas.DataFrame 也有一个 mode() 方法。 以下面的 pandas.DataFrame 为例。 df pd.DataFrame({‘col1’: [‘X’, ‘X’, ‘Y’, ‘X’], ‘col2’: [‘X’, ‘Y’, ‘Y’, ‘X’]}, index[‘row1’, ‘row2’, ‘row3’, ‘row4’]) print(df) col1 col2 row1 X X row2…...

SOLIDWORKS Simulation2024仿真10大新功能
SOLIDWORKS Simulation新增功能 1. 增强型轴承接头 •通过指定压缩、拉伸和弯曲的刚度,轻松创建自定义轴承接头。•通过向非线性和大型位移算例添加自定义条件,提高模拟精度。 优点:使用功能强大的接口,更轻松 、 更 准 确 地 设…...

Java程序设计2023-第二次上机练习
这里要用到一些面向对象的基本知识 目录 7-1 伪随机数 输入格式: 输出格式: 输入样例: 输出样例: 7-2 jmu-Java-03面向对象基础-01-构造方法与toString 1.编写无参构造函数: 2.编写有参构造函数 3.覆盖toString函数: 4.对每个属性生成setter…...
)
如何在 uniapp 里面使用 pinia 数据持久化 (pinia-plugin-persistedstate)
想要在 uniapp 里面使用 pinia-plugin-persistedstate 会遇到的问题就是 uniapp里面没有浏览器里面的 sessionStorage localStorage 这些 api。 我们只需要替换掉 pinia-plugin-persistedstate 默认的储存 api 就可以了。使用 createPersistedState 重新创建一个实例, 把里面的…...
智慧矿山AI算法助力护帮板支护监测,提升安全与效率
在智慧矿山AI算法系列中,护帮板支护监测是保障矿山安全和提高生产效率的重要环节。护帮板作为矿山支护体系中的重要组成部分,在矿山生产中起到了关键的作用。那么,护帮板在哪种状态下是正常打开的呢?本文将对此进行介绍。 护帮板的…...
shell中的运算
目录 1.运算符号 2.运算指令 练习 1.运算符号 运算符号意义加法-减法*乘法/除法%除法后的余数**乘方自加一- -自减一<小于<小于等于>大于>大于等于等于ji ->jji*j*i->jj*i/j/i->jj/i%j%i->jj%i 2.运算指令 (()) //((a12))let //let a12 …...

【Java 进阶篇】解决Java Web应用中请求参数中文乱码问题
在Java Web应用开发中,处理请求参数时经常会遇到中文乱码的问题。当浏览器向服务器发送包含中文字符的请求参数时,如果不正确处理,可能会导致乱码问题,使得参数无法正确解析和显示。本文将详细探讨Java Web应用中请求参数中文乱码…...
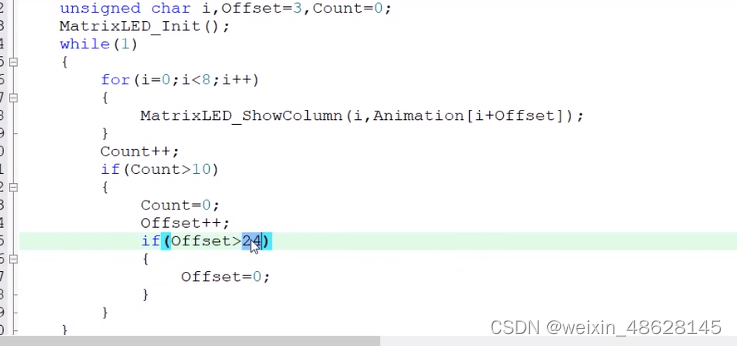
51单片机-点阵屏led
代码配置 这样就能选择每一列哪个亮了 进行位选,段清零,这样就不会影响多列同时了 实现动画 1、使用文字摸提取文件,提取图案的16进制表示数组 offest作为偏移量,count作为计时。count10,偏移量加1,就相当于得到下一…...
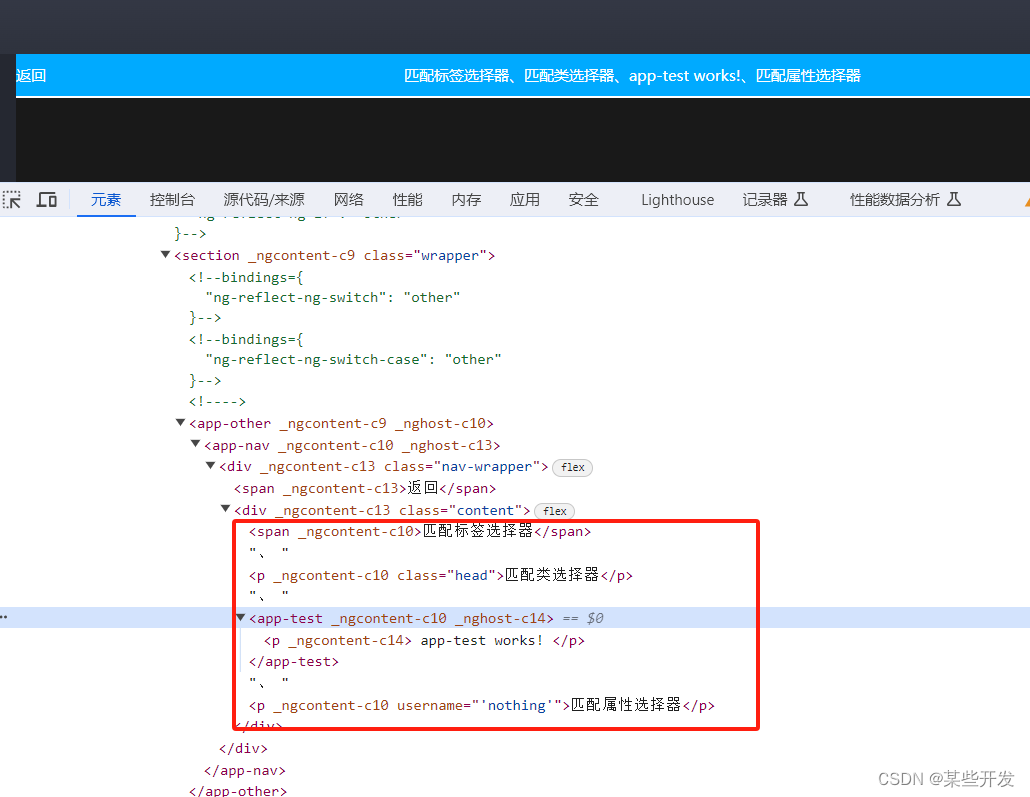
Angular-03:组件模板
各种学习后的知识点整理归纳,非原创! 组件模板 ① 数据绑定② 属性绑定③ 类名绑定④ 样式绑定⑤ 事件绑定⑥ 获取原生DOM对象6.1 在组件模板中获取6.2 在组件类中获取 ⑦ 双向数据绑定⑧ 内容投影8.1 select选择器8.2 单槽投影8.3 多槽投影 ⑨ 安全操作…...

mysql 操作慢查询日志
1、mysql 批量插入300w数据 CREATE PROCEDURE test_insert_200w() BEGINDECLARE i INT;SET i1;WHILE i<3000000 DOINSERT INTO shop_user (password, telephone, username) VALUES (admin, 15510304125, concat(admin, i));SET ii1;END WHILE; END; //执行sql call test_in…...

illuminate/database 使用 二
上一篇文章写怎么单独使用illuminate/database,这回讲下怎么整合到项目里使用。为此特意看了下laravel对其使用。本篇文章,参照laravel的使用,简单实现。 一 原理 laravel 里使用illuminate/config。 illuminate/config composer 地址&…...

二叉树的概念
文章目录 二叉树一、树的概念1.树形结构1.1. 树的特点:1.2 概念:1.3 树的表示形式 2.树的应用 二、二叉树1.二叉数的概念2.满二叉树3.完全二叉树4.二叉树的性质练习: 二叉树 一、树的概念 1.树形结构 1.1. 树的特点: 1.根节点没…...
SpringCloud之Eureka的学习【详细】
目录 服务架构演变 单体架构 分布式架构 分布式架构需要考虑的问题 微服务 架构比较 微服务技术对比 服务拆分注意事项 案例 服务远程调用 RestTemplate Eureka注册中心 RestTemplate存在的问题 服务调用考虑的问题 Eureka的作用 搭建EurekaServer 服务注册 …...
学习ftp
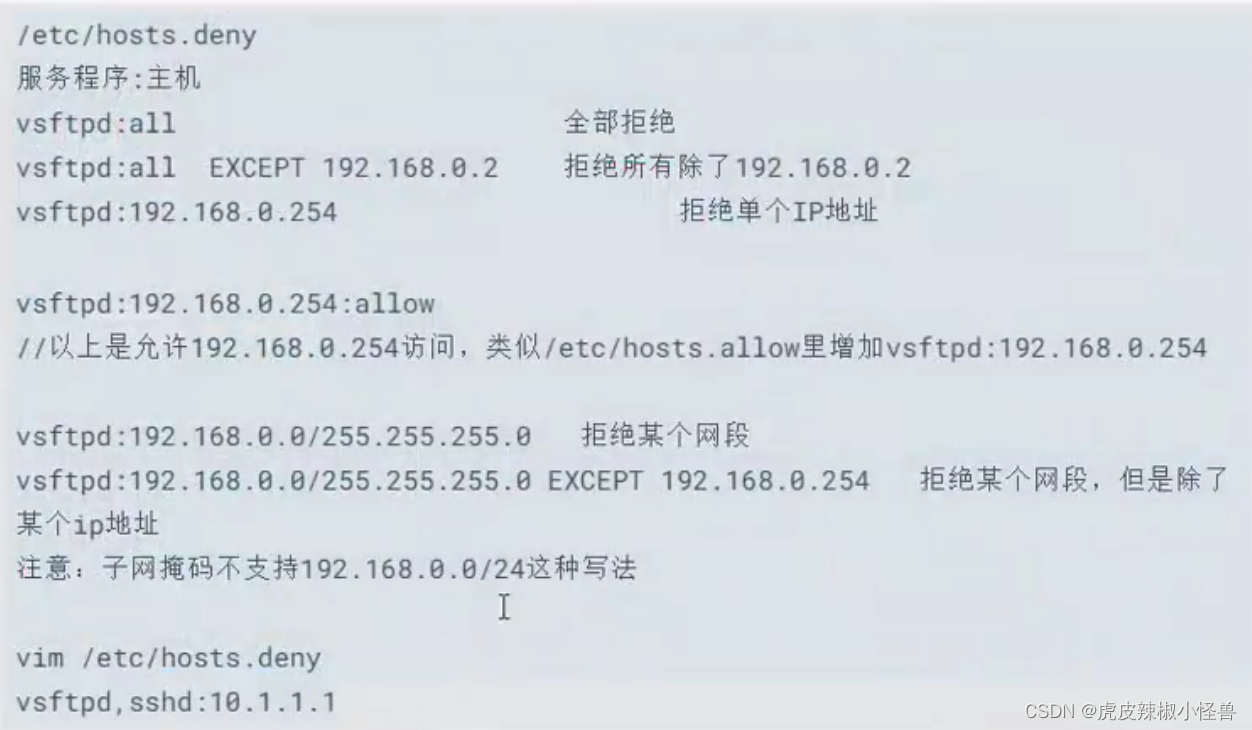
文章目录 一、FTP介绍二、两种模式(主动模式和被动模式)三、FTP配置文件详解四、实际场景举例五、黑白名单六、网络限制 一、FTP介绍 1.FTP(File Transfer Protocol)是一种应用广泛且古老的互联网文件传输协议。 2.主要应用于互联…...
Android笔记(九):Compose组件的状态(一)
在使用Compose定义UI界面时,可以发现界面的变换往往与Compose组件内部的状态相关,当状态值发生变化时,Compose构成的可组合的界面也会刷新发生相应的变化。将在本笔记中将对可组合项的状态的定义、状态提升、状态丢失和状态的保存进行简单介绍…...

3.2. onnx export multi_batch
前言 将onnx bs=1 修改为多batch操作 参考链接: https://www.cnblogs.com/tangjunjun/p/16500116.html https://blog.csdn.net/weixin_43863869/article/details/128638397?spm=1001.2101.3001.6650.3&utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault…...

探索低代码PaaS平台的优势与选择原因
PaaS是一种云产品,它为应用程序的开发和部署提供基础结构。它提供中间件、开发工具和人工智能来创建功能强大的应用程序,大多数PaaS服务都与存储和网络基础架构捆绑在一起,就像基础架构即服务(IaaS)一样,可…...
)
自指系统与算术障碍的跨领域猜想:封闭认知框架下的几何-物理-计算统一理论研究(世毫九实验室原创研究)
自指系统与算术障碍的跨领域猜想:封闭认知框架下的几何-物理-计算统一理论研究(世毫九实验室原创研究) 作者:方见华 单位:世毫九实验室 摘要 本研究提出了一个关于"自指系统与算术障碍的跨领域猜想"的理论框…...

从零开始:5分钟掌握Mermaid Live Editor,告别复杂图表绘制烦恼
从零开始:5分钟掌握Mermaid Live Editor,告别复杂图表绘制烦恼 【免费下载链接】mermaid-live-editor Edit, preview and share mermaid charts/diagrams. New implementation of the live editor. 项目地址: https://gitcode.com/GitHub_Trending/me/…...

【AI绘画构图生死线】:为什么你的提示词再精准也出不了大片?——透视层级、视觉动线与负空间权重分配全拆解
更多请点击: https://kaifayun.com 第一章:AI绘画构图的底层认知革命 传统构图理论建立在人眼视觉经验与经典美学范式之上,而AI绘画的构图逻辑则根植于高维特征空间中的统计分布、注意力权重映射与跨模态对齐机制。当用户输入“晨雾中的孤松…...

知识竞赛电子计分板 vs 手工计分板:差距有多大
知识竞赛电子计分板 vs 手工计分板:差距有多大 无论是学校班级的趣味问答,还是企业年会、电视直播的知识竞赛,计分板都是整场活动的核心视觉焦点。传统的手工计分板(如白板、翻牌、纸质表格)曾陪伴我们多年,…...

双榜第一!文心5.1登顶中文创意写作综合实力评测
【大力财经】5月18日,全球权威ICT领域市场研究机构Omdia发布《2026 年基础模型中文创意写作能力评估》报告,围绕中文创意写作七大核心维度,对 DeepSeek V4、文心5.1(ERNIE 5.1)、GPT 5.5 等 8大国内外主流顶级文本模型…...

对比使用Taotoken前后在模型API费用支出上的月度观察
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比使用Taotoken前后在模型API费用支出上的月度观察 作为一名个人开发者,我日常的开发工作离不开大语言模型的辅助&am…...

家庭宽带上网背后的隐形功臣:一文拆解光猫/路由器里的NAT和DHCP是怎么协同工作的
家庭网络中的隐形守护者:NAT与DHCP如何编织你的数字生活 当你躺在沙发上用手机追剧时,是否想过为什么所有家庭设备都能和平共处在同一网络?192.168.1.x这串神秘数字背后,藏着两套精密的协议系统——它们像建筑物的水电管线般隐形却…...

Chrome密码恢复终极指南:如何安全找回所有浏览器保存的密码
Chrome密码恢复终极指南:如何安全找回所有浏览器保存的密码 【免费下载链接】chromepass Get all passwords stored by Chrome on WINDOWS. 项目地址: https://gitcode.com/gh_mirrors/chr/chromepass 你是否曾经因为忘记某个重要网站的密码而焦虑࿱…...
亲测靠谱的AI论文网站,毕业生收藏备用)
(良心整理)亲测靠谱的AI论文网站,毕业生收藏备用
毕业季论文写作真的这么难吗?选题卡壳、文献翻不完、写不下去、查重过不了、格式总不对…… 这份亲测靠谱的AI论文工具合集,涵盖中英文写作、全流程辅助和专项功能,免费和高性价比都有,从开题到定稿全程帮你搞定,毕业生…...

技术架构深度剖析:如何构建专业的浏览器资源嗅探扩展
技术架构深度剖析:如何构建专业的浏览器资源嗅探扩展 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 在现代浏览器扩展开发领域&#x…...